
Point Distribution Models for Pose Robust Face
Recognition: Advantages of Correcting Pose Parameters
Over Warping Faces to Mean Shape
Daniel Gonz
´
alez-Jim
´
enez and Jos
´
e Luis Alba-Castro
⋆
Departamento de Teor
´
ıa de la Se
˜
nal y Comunicaciones
Universidad de Vigo (Spain)
Abstract. In the context of pose robust face recognition, some approaches in the
literature aim to correct the original faces by synthesizing virtual images facing
a standard pose (e.g. a frontal view), which are then fed into the recognition sys-
tem. One way to do this is by warping the incoming face onto the average frontal
shape of a training dataset, bearing in mind that discriminative information for
classification may have been thrown away during the warping process, specially
if the incoming face shape differs enough from the average shape. Recently, it
has been proposed a method for generating synthetic frontal images by modifi-
cation of a subset of parameters from a Point Distribution Model (the so-called
pose parameters), and texture mapping. We demonstrate that if only pose param-
eters are modified, client specific information remains in the warped image and
discrimination between subjects is more reliable. Statistical analysis of the veri-
fication experiments conducted on the XM2VTS database confirm the benefits of
modifying only the pose parameters over warping onto a mean shape.
1 Introduction
It is well known that the performance of face recognition systems drops drastically
when pose differences are present within the input images, and it has become a major
goal to design algorithms that are able to cope with this kind of variations. Some of
these approaches aim to synthesize faces across pose in order to cope with viewpoint
differences. One of the earliest attempts was done by Beymer and Poggio [1]: from a
single image of a subject and making use of face class information, virtual views facing
different poses were synthesized. For the generation of the virtual views, two different
techniques were used: linear classes and parallel deformation. Vetter and Poggio also
took advantage of the concept of linear classes to synthesize face images from a single
example in [8]. Blanz et al. employed the 3D Morphable Model [6] to synthesize frontal
faces from non frontal views in [7], which were then fed into the recognition system.
In this same direction, other researchers have tried to generate frontal faces from non
frontal views, like the works proposed by Xiujuan Chai et al. in [4], via linear regression
⋆
This work was supported with funds provided partially by the Spanish ministry of education
under project TEC2005-07212/TCM and the European sixth framework programme under the
Network of Excellence BIOSECURE (IST-2002-507604)
González-Jiménez D. and Luis Alba-Castro J. (2007).
Point Distribution Models for Pose Robust Face Recognition: Advantages of Correcting Pose Parameters Over Warping Faces to Mean Shape.
In Proceedings of the 7th International Workshop on Pattern Recognition in Information Systems, pages 138-147
DOI: 10.5220/0002428001380147
Copyright
c
SciTePress

in each of the regions in which the face is divided, and in [5] where a 3D model is used.
More recently, Gonz
´
alez-Jim
´
enez and Alba-Castro [9] have proposed an approach for
generating frontal faces via modification of a subset of parameters from a Point Dis-
tribution Model (so-called pose parameters) and texture mapping. Another possibility
is to warp the face image onto a frontal standard shape (e.g. the average frontal shape
of a training dataset) prior to recognition. This solution is adopted by methods that use
holistic features for face representation (e.g. Eigenfaces [2]), and that need all images to
be embedded into a constant reference frame. For example, Lanitis et al. [10] deformed
each face image to the mean shape using 14 landmarks, extracted shape and appearance
parameters and classified using the Mahalanobis distance.
The difference between the synthetic images obtained using the methods described
in [9] and [10] relies on the generation of the synthetic frontal shapes onto which the
original faces must be warped. It seems rather safe to think that warping faces onto
a mean shape may provoke discriminative information reduction, specially if the in-
coming face shape differs enough from the average shape (see Figure 1). On the other
hand, [9] did not analyze whether the modification of the pose parameters had any in-
fluence on non-rigid factors (such as expression and identity), which could provoke non
desirable effects in the synthesized faces. The goal of this paper is two-fold:
1. Show that, if the training set is chosen appropriately, pose parameters do not contain
important non-rigid (expression/identity) information, and
2. Propose an empirical comparison of the synthetic images obtained with the meth-
ods described in [9] and [10] respectively. Obviously, we need a non-subjective
way to compare the two approaches and, to this aim, we conducted face verifica-
tion experiments on the XM2VTS database [11] using Gabor filtering for feature
extraction.
Fig.1. Images from subject 013 of the XM2VTS. Left: Original image. Right: Image warped
onto the average shape. Observe that subject-specific information has been reduced (specially in
the lips region).
The paper is organized as follows. Next section briefly reviews Point Distribution
Models, and introduces the concepts of Pose Eigenvectors and Pose Parameters. The
two techniques used to generate frontal face images are presented in Section 3. Section
4 shows the results of the verification experiments conducted on the XM2VTS database
[11]. Finally, conclusions are drawn in Section 5.
139

2 A Point Distribution Model For Faces
A point distribution model (PDM) of a face is generated from a set of training ex-
amples. For each training image I
i
, N landmarks are located and their normalized
coordinates (by removing translation, rotation and scale) are stored, forming a vector
X
i
= (x
1i
, x
2i
, . . . , x
Ni
, y
1i
, y
2i
, . . . , y
Ni
). The pair (x
ji
, y
ji
) represents the normal-
ized coordinates of the j-th landmark in the i-th training image. Principal Components
Analysis (PCA) is performed to find the most important modes of shape variation. As a
consequence, any training shape X
i
can be approximately reconstructed:
X
i
=
¯
X + Pb, (1)
where
¯
X stands for the mean shape, P = [φ
1
|φ
2
| . . . |φ
t
] is a matrix whose columns are
unit eigenvectors of the first t modes of variation found in the training set, and b is the
vector of parameters that define the actual shape of X
i
. So, the k -th component from b
(b
k
, k = 1, 2, . . . , t) weighs the k-th eigenvector φ
k
. Also, since the columns of P are
orthogonal, we have that P
T
P = I, and thus:
b = P
T
X
i
−
¯
X
, (2)
i.e. given any shape, it is possible to obtain its vector of parameters b. We built a 62-
point PDM using manually annotated landmarks (some of them were provided by the
FGnet project
1
, while others were manually annotated by ourselves). Figure 2 shows
the position of the landmarks on an image from the XM2VTS database [11].
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60 61
62
Fig.2. Position of the 62 landmarks used in this paper on an image from the XM2VTS database.
2.1 Pose Eigenvectors and Pose Parameters
Among the obtained modes of shape variation, the authors of [9] identified the eigen-
vectors that were responsible for controlling the apparent changes in shape due to rigid
facial motion. However, it was not analyzed whether the modification of these pose pa-
rameters had any influence on non-rigid factors (such as expression and identity), which
1
Available at http://www-prima.inrialpes.fr/FGnet/data/07-XM2VTS/xm2vts-markup.html
140

could provoke non desirable effects on the synthesized faces. In this section, we show
that if the training data are appropriately chosen, the identified pose parameters do only
account for pose variations.
Clearly, the eigenvectors (and their relative position) obtained after PCA strongly
depend on the training data and hence, the choice of the examples used to build the PDM
is critical. In fact, if all training meshes were strictly frontal, there would not appear any
eigenvector explaining rotations in depth. However, if we are sure that pose changes
are present in the training set, the eigenvectors explaining those variations will appear
among the first ones, due to the fact that the energy associated to rigid facial motion
should be higher than that of most expression/identity changes (once again, depending
on the specific dataset used to train the PDM). With our settings, it turned out that φ
1
controlled up-down rotations (see Figure 3) while φ
2
(Figure 4) was the responsible
for left-right rotations. Hence, given a mesh X with a vector of shape parameters b =
[b
1
, b
2
, . . . , b
t
]
T
, we can change the values of b
1
and b
2
(i.e. the pose parameters), and
use equation (1) to generate a synthetic mesh X
2
facing a different pose.
A major problem, inherent to the underlying PCA analysis, relies on the fact that
a given pose-eigenvector may not only contain rigid facial motion (pose) but also non-
rigid (expression/identity) information, mostly depending on the training data used to
build the PDM. The reconstructed shapes in Figure 4, show that expression changes are
not noticeable when sweeping b
2
. Regarding φ
1
, it has been shown [15] that there exists
a dependence between the vertical variation in viewpoint (nodding) and the perception
of facial expression, as long as faces that are tilted forwards (leftmost shape in Figure
3) are judged as happier, while faces tilted backwards (rightmost shape in Figure 3) are
judged as sadder. Apart from this subjective perception, we provide visual evidence in
the next section suggesting that the influence of non-rigid factors within φ
1
and φ
2
is
small.
Fig.3. Effect of changing the value b
1
on the reconstructed shapes. φ
1
controls the up-down
rotation of the face.
Fig.4. Effect of changing the value b
2
on the reconstructed shapes. φ
2
controls the left-right
rotation of the face.
141

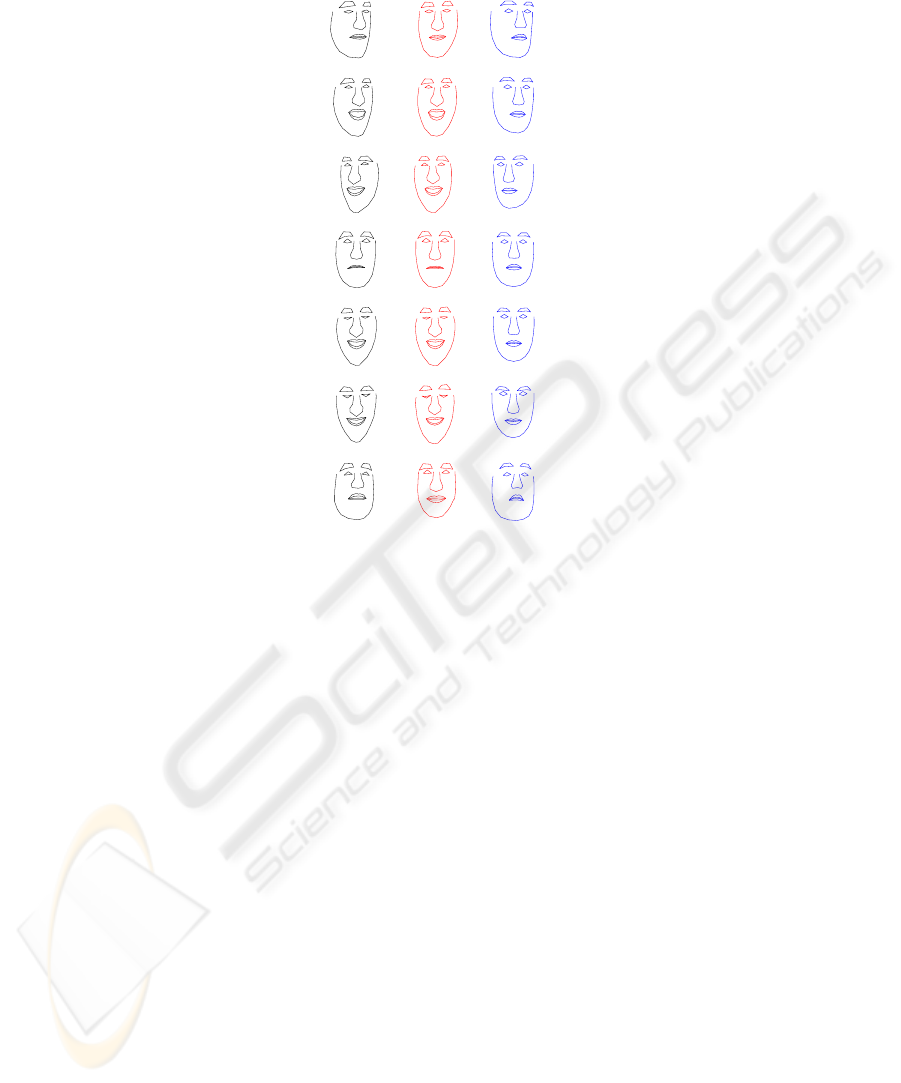
2.2 Experiment on a Video-sequence: Decoupling of Pose and Expression
In order to demonstrate that the presence of non-rigid factors within the identified pose-
eigenvectors is minimal, we used a manually annotated video-sequence of a man during
conversation
2
(hence, rich in expression changes). For each frame f in the video, the
vector of shape parameters
b(f ) = [b
1
(f) , b
2
(f) , . . . , b
t
(f)]
T
of the corresponding mesh X(f) was calculated and splitted into the rigid (pose) part
b
pose
(f) = [b
1
(f) , b
2
(f) , 0, . . . , 0]
T
and the non-rigid (expression) part
b
exp
(f) = [0, 0, b
3
(f) , . . . , b
t
(f)]
T
Finally, we calculated the reconstructed meshes X
pose
(f) and X
exp
(f) using equa-
tion (1) with b
pose
(f) and b
exp
(f) respectively. Ideally, X
pose
(f) should only contain
rigid mesh information, while X
exp
(f) should reflect changes in expression and con-
tain identity information. As shown in Figure 5, it is clear that although there exists
some coupling (specially in the seventh row with small eyebrow bending in X
pose
(f)),
X
exp
(f) is responsible for expression changes and identity information (face shape
is clearly encoded in X
exp
(f)) while X
pose
(f) does mainly contain rigid motion in-
formation. For instance, the original shapes from the first and second rows share ap-
proximately the same pose, but differ substantially in their expression. Accordingly, the
X
pose
’s are approximately the same while the X
exp
’s are clearly different.
3 Synthesizing Frontal Faces
Given two faces I
A
and I
B
to be compared, the system must output a measure of simi-
larity (or dissimilarity) between them. Straightforward texture comparison between I
A
and I
B
may not produce desirable results as differences in pose could be quite impor-
tant. In this section, we describe the two approaches proposed in [10] and [9] for frontal
face synthesis. These two methods share one common feature: given one face image I,
the coordinates of its respective fitted mesh, X, and a new set of coordinates, X
2
, a syn-
thetic face image must be generated by warping the original face onto the new shape.
For this purpose, we used a method developed by Bookstein [13], based on thin plate
splines. Provided the set of correspondences between X and X
2
, the original face I is
allowed to be deformed so that the original landmarks are moved to fit the new shape.
2
http://www-prima.inrialpes.fr/FGnet/data/01-TalkingFace/
talking
face.html
142
Original shape (X)
X
exp
X
pose
Original shape (X)
X
exp
X
pose
Original shape (X)
X
exp
X
pose
Original shape (X)
X
exp
X
pose
Original shape (X)
X
exp
X
pose
Original shape (X)
X
exp
X
pose
Original shape (X)
X
exp
X
pose
Fig.5. Experiment on the video sequence. Each row shows, for a given frame f, the original shape
X(f) and the reconstructed shapes (X
exp
(f) and X
pose
(f)) using b
exp
(f) and b
pose
(f) respec-
tively. Clearly, X
exp
(f) controls expression and identity while X
pose
(f) is mostly responsible
for rigid changes.
3.1 Warping to Mean Shape (WMS) [10]
Once the meshes have been fitted to I
A
and I
B
, both faces are warped onto the average
shape of the training set,
¯
X, which corresponds to setting all shape parameters to 0, i.e.
b
A
= b
B
= 0. Thus, the images are deformed so that a set of landmarks are moved
to coincide with the correspondent set of landmarks on the average shape, obtaining
¯
I
A
and
¯
I
B
. The number of landmarks used as “anchor” points is another variable to be
fixed. For the experiments, we used two different sets:
– The whole set of 62 points.
– The set of 14 landmarks used in [10].
As the number of “anchor” points grows, the synthesized image is more likely to
present artifacts because more points are forced to be moved to landmarks of a mean
shape (which may differ significantly from the subject’s shape). On the other hand, with
few “anchor” points, little pose correction can be made.
143
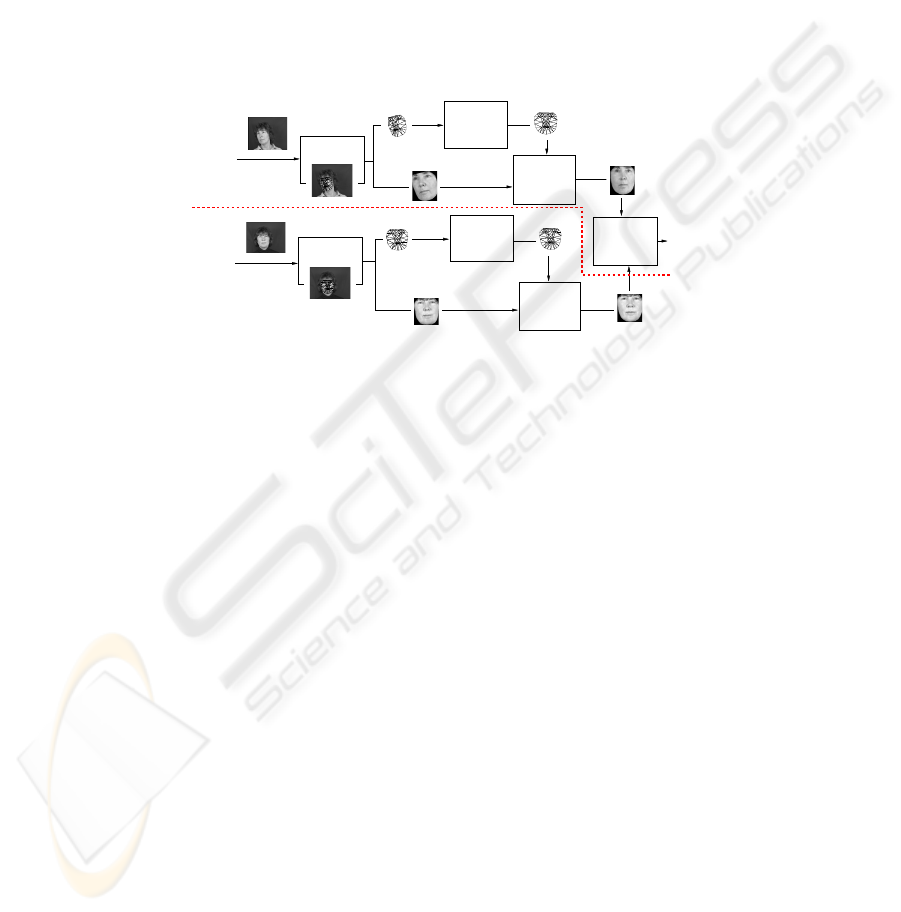
3.2 Normalizing to Frontal Pose and Warping (NFPW) [9]
Once demonstrated that the pose parameters do only account for pose variations (Sec-
tions 2.1 and 2.2), we suggest that normalizing only these parameters should produce
better results than warping images onto a mean shape, as long as we are not modifying
identity information. In Figure 6, we can see a block diagram of this method. Given b
A
and b
B
, only the pose parameters are fixed to the typical values of frontal faces from the
training set (as the average shape corresponds to a frontal face, we fixed pose parame-
ters to zero, i.e. b
pose
A
= b
pose
B
= 0). New coordinates are computed using Equation 1,
and virtual images,
ˆ
I
A
and
ˆ
I
B
, are synthesized.
Normalization
Pose
Normalization
Pose
TPS Warping
Comparison
Final
TPS Warping
Input image
Face Alignment
Face Alignment
Training
image
ONLINE
OFFLINE
Fig.6. Block diagram for pose correction using NFPW. After face alignment, the obtained meshes
are corrected to frontal pose (Pose Normalization block), and virtual faces are obtained through
Thin Plate Splines (TPS) warping. Finally, both synthesized images are compared. It is important
to note that the processing of the training image could (and should) be done offline, thus saving
time during recognition.
4 Face Authentication on the XM2VTS Database
Using the XM2VTS database [11], authentication experiments were performed on con-
figuration I of the Lausanne protocol [12] in order to confirm the advantages of modi-
fying only pose parameters over warping onto a mean shape.
4.1 Feature Extraction
Holistic approaches such as eigenfaces [2] need all images to be embedded into a con-
stant reference frame (an average shape for instance), in order to represent these images
as vectors of ordered pixels. This constraint is violated by the faces obtained through
NF P W , leading us to the use of local features: Gabor jets as defined in [3] are ex-
tracted at each of the pose corrected mesh coordinates and stored for further compari-
son.
144
4.2 Database and Experimental Setup
The XM2VTS database contains face images recorded on 295 subjects (200 clients, 25
evaluation impostors, and 70 test impostors) during four sessions taken at one month
intervals. The database was divided into three sets: a training set, an evaluation set, and
a test set. The training set was used to build client models, while the evaluation set
was used to estimate thresholds. Finally, the test set was employed to assess system
performance.
We compared the performance of the different methods presented in section 3: a)
WMS 14: Warping images onto a mean shape using the same set of 14 “anchor” points
employed in [10], b) WMS 62: Warping images onto a mean shape using the full set of
62 “anchor” points, and c) NFPW: Normalizing only the subset of pose parameters to
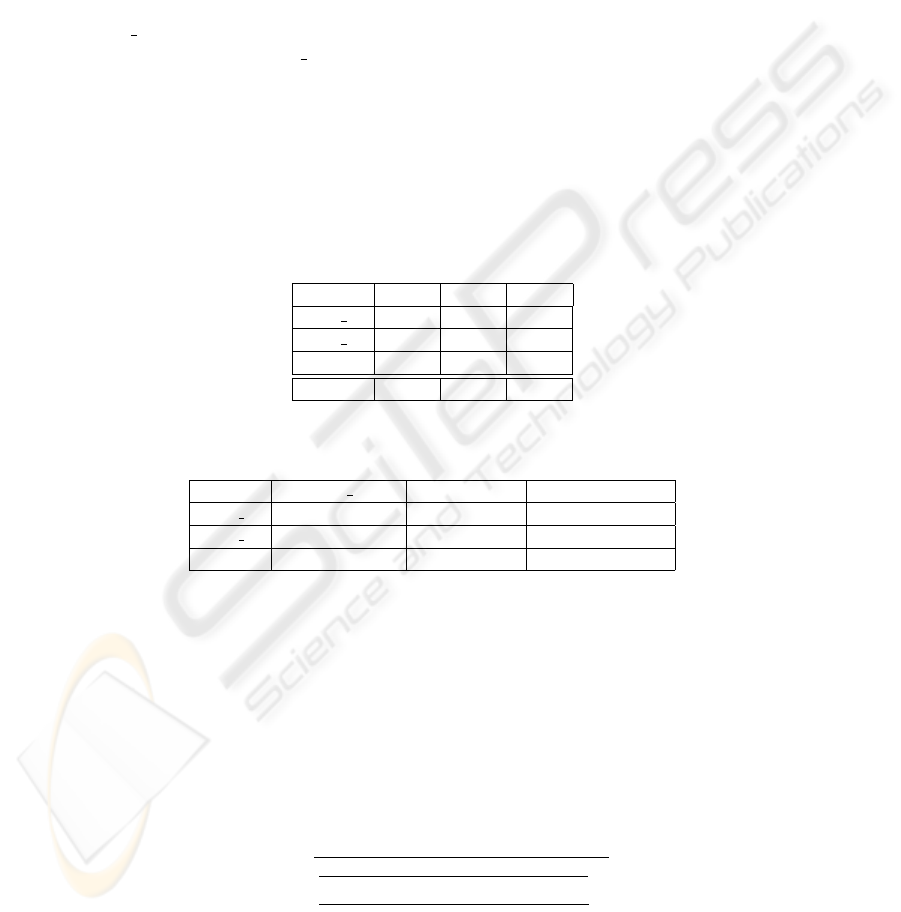
generate a frontal mesh. Table 1 shows the False Acceptance Rate (FAR), False Rejec-
tion Rate (FRR) and Total Error Rate (TER=FAR+FRR) over the test set for the above
mentioned methods. Moreover, the last row from this table presents the baseline results
when no pose correction is applied (Baseline).
Table 1. False Acceptance Rate (FAR), False Rejection Rate (FRR) and Total Error Rate (TER)
over the test set for different methods.
METHOD FAR(%) FRR(%) TER(%)
WMS 14 2.31 5.00 7.31
WMS 62 2.64 4.50 7.14
NFPW 2.17 2.75 4.92
Baseline 2.93 4.25 7.18
Table 2. Confidence interval around ∆
HT ER
= HT ER
A
− HT ER
B
for Z
α/2
= 1.645.
METHOD WMS 62 NFPW Baseline
WMS 14 [−1.15%, 1.32%] [0.07%, 2.32%] [−1.16%, 1.29%]
WMS 62 [0.02%, 2.20%] [−1.21%, 1.17%]
NFPW [−2.20%, −0.06%]
4.3 Statistical Analysis of the Results
In [14], the authors adapt statistical tests to compute confidence intervals around Half
Total Error Rates (HT ER = T ER/2) measures, and to assess whether there exist
statistically significant differences between two approaches or not. Given methods A
and B with respective performances HT ER
A
and HT ER
B
, we compute a confidence
interval (CI) around ∆
HT ER
= HT ER
A
− HT ER
B
. Clearly, if the range of ob-
tained values is symmetric around 0, we can not say the two methods are different. The
confidence interval is given by ∆
HT ER
± σ · Z
α/2
, where
σ =
s
F AR
A
(1−F AR
A
)+F AR
B
(1−F AR
B
)
4·NI
+
F RR
A
(1−F RR
A
)+F RR
B
(1−F RR
B
)
4·NC
(3)
145

and
Z
α/2
=
1.645 for a 90% CI
1.960 for a 95% CI
2.576 for a 99% CI
(4)
In equation (3), NC stands for the number of client accesses, while NI stands for
the number of imposter trials. For each comparison between the methods presented in
table 1, we calculated confidence intervals which are shown in table 2. From both tables
we can conclude:
1. Although pose variation is not a major characteristic of the XM2VTS database, it is
clear that the use of NFPW significantly improved system performance compared
to the baseline method.
2. Warping images to a mean shape suffers from the greatest degradation in perfor-
mance. It is clear that synthesizing face images with WMS does seriously distort
the “identity” of the warped image, as long as the performances of the baseline al-
gorithm and the two WMS’s methods are very similar (robustness to pose provokes
subject-specific information supression, leading to no improvement at all). Further-
more, we assess that significant differences are present when comparing WMS with
NFPW, as the confidence intervals do not include 0 in their range of values.
3. There are no statistically significant differences between WMS
14 and WMS 62, as
the confidence interval is symmetric around 0.
It was previously stated that NFPW was not suitable for holistic feature extraction, but
this is not the case of WMS. In order to assess the performance of a (baseline) holistic
method on W MS faces, we applied eigenfaces [2] and obtained a TER of 16.27%,
which is significantly worse than that of the local feature extraction on WMS faces,
with a confidence interval around ∆
HT ER
of [2.95%, 6.01%].
5 Conclusions
We have demonstrated that, if the training set is appropriately chosen, the pose eigen-
vectors as introduced in [9] are mostly responsible for rigid mesh changes, and do not
contain important non-rigid (expression/identity) information that could severely distort
the synthetic meshes. Moreover, we have confirmed, with experimental results on the
XM2VTS database, the advantages of modifying these pose parameters over warping
faces onto a mean shape.
References
1. Beymer, D.J. and Poggio, T., “Face Recognition from One Example View,” in Proceedings
ICCV 1995, 500–507.
2. Turk, M. and Pentland, A., “Eigenfaces for recognition,” in Journal of Cognitive Neuro-
science Vol. 3, 1991, pp. 7286.
3. Wiskott, L., Fellous, J.M., Kruger, N., von der Malsburg, C., “Face recognition by Elastic
Bunch Graph Matching,” in IEEE Transactions on PAMI, Vol. 19, No.7, 1997 pp. 775–779.
146

4. Xiujuan Chai, Shiguang Shan, Xilin Chen, Wen Gao, “Local Linear Regression (LLR)
for Pose Invariant Face Recognition,” in Proceedings of 7th International Conference on
AFGR’06, 631–636.
5. Xiujuan Chai, Laiyun Qing, Shiguang Shan, Xilin Chen, Wen Gao, “Pose Invariant Face
Recognition under Arbitrary Illumination based on 3D Face Reconstruction,” in AVBPA
2005, NY, USA, 2005, 956–965.
6. Blanz, V. and Vetter, T., “A Morphable model for the synthesis of 3D faces,” in Proceedings
SIGGRAPH 1999, 187-194.
7. Blanz, V., Grother, P., Phillips, P.J., and Vetter, T., “Face Recognition Based on Frontal
Views Generated from Non-Frontal Images,” in Proceedings IEEE Conference on CVPR
2005, 454–461.
8. Vetter T., and Poggio T., “Linear Object Classes and Image Synthesis from a Single Example
Image,” IEEE PAMI vol. 19, pp. 733–742, 1997
9. Gonz
´
alez-Jim
´
enez, D. and Alba-Castro, J.L., “Pose Correction and Subject-Specific Features
for Face Authentication”, in ICPR 2006, Vol. 4.
10. Lanitis, A., Taylor, C.J. and Cootes, T.F.,“Automatic Interpretation and Coding of Face Im-
ages Using Flexible Models,”in IEEE PAMI, Vol. 19, No. 7, pp. 743–756, 1997.
11. Messer, K., Matas, J., Kittler, J., Luettin, J., and Maitre, G. XM2VTSDB: “The extended
M2VTS database,” in Proceedings AVBPA 1999, 72–77.
12. Luttin, J. and Ma
ˆ
ıtre, G. “Evaluation protocol for the extended M2VTS database
(XM2VTSDB),” Technical report RR-21, IDIAP, 1998.
13. Bookstein, Fred L.: “Principal Warps: Thin-Plate Splines and the Decomposition of Defor-
mations,” in IEEE PAMI, Vol. 11, No. 6, April 1989, pp. 567–585.
14. Bengio, S., Mariethoz, J. “A statistical significance test for person authentication”, in Pro-
ceedings Odyssey 2004, 237–244.
15. Lyons, M.J., Campbell, R., Plante, A., Coleman, M., Kamachi, M., and Akamatsu, S., “The
Noh Mask Effect: Vertical Viewpoint Dependence of Facial Expression Perception,” in Pro-
ceedings of the Royal Society of London B 267: 2239-2245 (2000).
147
