
INTERACTION-ORIENTED COLLABORATIONS
Giorgio Bruno
Dip. Automatica e Informatica, Politecnico di Torino, Torino, Italy
Keywords: Collaborative business processes, binary collaborations, choreographies, abstract orchestration models.
Abstract: This paper addresses binary collaborations and choreographies, based on web services technology. The
nature of the problem leads to two complementary approaches: one focuses on activities, and the other on
interactions. This paper follows the interaction-oriented approach and proposes a modeling notation, called
Interaction-Oriented Nets (IONs), which allows binary collaborations, choreographies and abstract
orchestration models (i.e. abstract business processes made up of communication activities) to be
homogeneously represented.
1 INTRODUCTION
In the domain of collaborative business processes,
collaboration is the term denoting the situation in
which two or more participants (i.e. their business
processes) exchange messages so as to achieve a
common goal. Before carrying out the actual
collaboration, the participants have to agree on an a
priori model, called collaboration model or
choreography, specifying how the interactions have
to take place. The models defining the interactions
between two participants are called binary
collaboration models.
Collaboration models are addressed from two
perspectives: one is focusing on the observable
activities of the participants, and the other on the
interactions. These approaches are not conflicting: in
fact, a one-way interaction subsumes two activities,
a sending activity in one participant, and a receiving
activity in the other.
The activity-oriented collaboration models are
also called inter-organizational (or cross-
organizational) workflows. They are global models
defining the observable activities of the participants
as well as their ordering constraints.
The major issues addressed in this area of
research are the modeling language for the global
model, and the mapping from the global model to
the local (i.e. pertaining to a given participant)
business processes, also called local workflows or
abstract processes.
This approach is appealing as the global model is
similar to a business process, and for this reason the
modeling language is the same. As to the mapping,
several techniques have been proposed. The Public-
To-Private technique (van der Aalst and Weske,
2001) follows a top-down approach consisting of
three steps: the participants agree on a global Petri
net, then the public model is partitioned into public
parts, one per participant, and finally each
participant refines its public part into a private
workflow. The private workflows are guaranteed to
conform to the global model, as the private
refinement is based on a specific notion of
inheritance. The technique (Zhao, Liu and Yang,
2005) based on relative workflows follows a bottom-
up approach, since each participant can expose
different public parts, called relative workflows, to
the other participants. A mixed approach is the one
based on workflow views (Orlowska and Schulz,
2004). Workflow views are the public parts of a
cross-organizational model, called a coalition
workflow: private workflows interact with workflow
views and workflow views interact with each other,
either directly or through a mediator.
The approach focusing on interactions is more
abstract. In fact, interactions, which are of two types,
i.e. one-way interactions and two-way ones, are
abstract entities, as in reality they are carried out by
sending activities and receiving ones. Interaction-
oriented binary collaboration models were first
proposed in the e-business domain by the RosettaNet
consortium (Damodaran, 2004), which adopted the
UMM modeling notation (UMM, 2003) and the
ebXML BPSS textual description (BPSS, 2001). The
content of application messages in a variety of
202
Bruno G. (2007).
INTERACTION-ORIENTED COLLABORATIONS.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - SAIC, pages 202-207
DOI: 10.5220/0002376502020207
Copyright
c
SciTePress
business cases, quality of service requirements and
transactional features are the key issues of this
initiative. A recent proposal is the Web Services
Choreography Description Language (WS-CDL,
2005): it is an XML-based language addressing
peer-to-peer collaborations.
This paper follows the interaction-oriented
approach and proposes a modeling notation, called
Interaction-Oriented Nets (IONs), which addresses
binary collaborations and choreographies
homogeneously. On the contrary, UMM does not
deal specifically with binary collaborations, and
BPSS handles binary collaborations only. The same
notation can also be used to represent abstract
orchestration models (AOMs), an AOM being a
local (i.e. pertaining to a given participant) business
process restricted to communication activities and
control-flow ones.
This paper is organized as follows. Section 2
presents Interaction-Oriented Nets and shows how
binary collaborations can be represented. Section 3
illustrates light choreographies, which are meant to
complement binary collaborations by capturing the
global constraints. Section 4 addresses abstract
orchestration models and section 5 presents the
conclusion and the future work.
2 BINARY COLLABORATIONS
Two examples of binary collaborations are shown in
Fig. 1. They are based on a special kind of Petri nets,
called Interaction-Oriented Nets (IONs), which can
be informally described, as follows.
There are two types of transitions in an ION, i.e.
ordinary transitions and interaction-oriented ones.
The latter represent either one-way interactions, such
as order, or two-way interactions, such as rfq/quote
(rfq stands for request for quote). In two-way
interactions, a slash (/) separates the request message
from the response one. As in RosettaNet, application
messages, such as rfq, quote and order, are
acknowledged by means of signal messages; usually
a signal message acknowledges that an application
message has been received and has been
syntactically validated. Signal messages do not need
to be shown in collaboration models. The types of
the messages are defined in an XML schema file
associated with the collaboration model.
A binary collaboration takes place between two
participants, denoted by two conventional roles, i.e.
requester and provider. An interaction also takes
place between two participants, denoted by two
conventional roles, i.e. initiator and responder. The
collaboration requester coincides with the initiator of
the first interaction. If an interaction is initiated by
the collaboration provider, the request message is
underlined (this case does not appear in Fig. 1).
There are similarities with the work done by the
Language/Action community: in fact, the notions of
business act, action pair and business transaction
(Lind and Goldkuhl, 2003) are similar to the notions
of one-way interaction, two-way interaction and
binary collaboration, respectively, although the
former appear to be more abstract than the latter.
Binary collaborations are meant to be used in
abstract orchestration models and in choreographies;
then, more specific roles (e.g. buyer and seller),
instead of the conventional ones, will be adopted, as
will be shown in the next sections.
An ION has a source place (initially marked) and
a sink place: moreover, it is case based, as it
describes the life cycle of a single collaboration. To
make the model more compact, places are absorbed
in links, unless they have two or more incoming
links or two or more outgoing links.
rfq/quote
order
rfq/quote
order
Annotations:
t1{quote.d = rfq.tq;}
t2{order.d = t1.rfq.to;}
(a) Collaboration RO (b) Collaboration ROa
timeout
s1
s2
t3
t1
t2
t1
t2
Annotations:
t1{quote.d = rfq.tq; in = xor;}
t2{order.d = t1.rfq.to; in = xor;}
t3{g: quote.negotiable; p = 1;}
timeout
rfq/quote
order
rfq/quote
order
Annotations:
t1{quote.d = rfq.tq;}
t2{order.d = t1.rfq.to;}
(a) Collaboration RO (b) Collaboration ROa
timeout
s1
s2
t3
t1
t2
t1
t2
Annotations:
t1{quote.d = rfq.tq; in = xor;}
t2{order.d = t1.rfq.to; in = xor;}
t3{g: quote.negotiable; p = 1;}
timeout
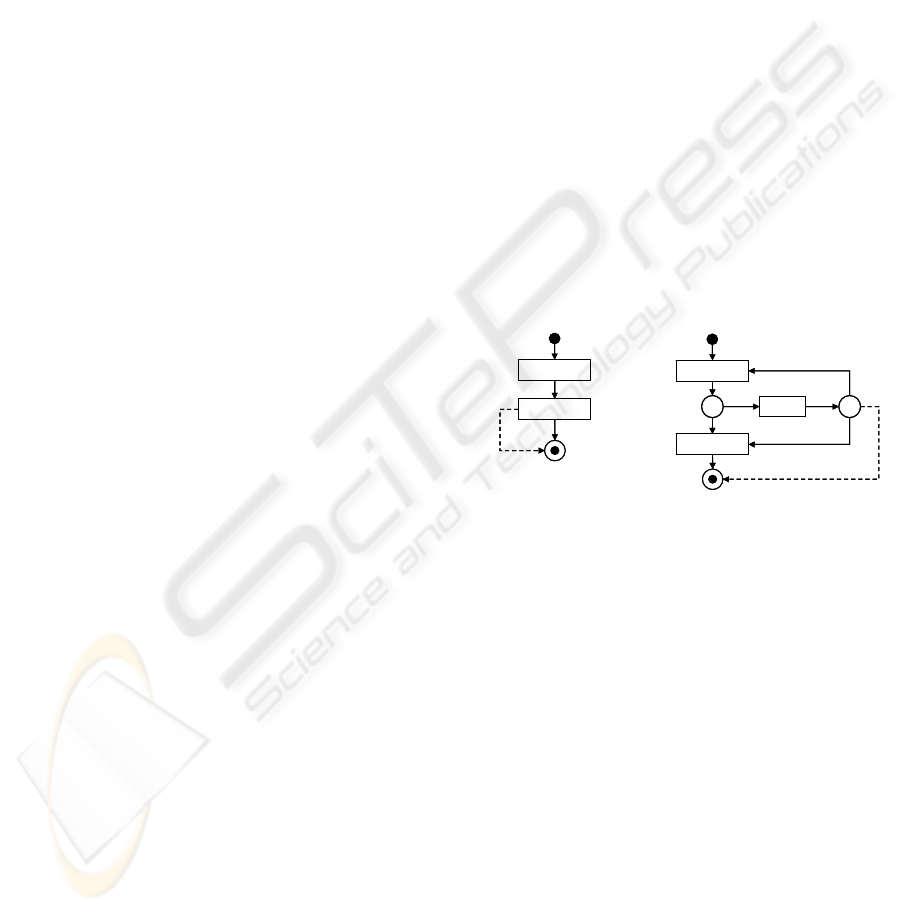
Figure 1: Binary collaborations RO (a) and ROa (b).
In collaboration RO, shown in Fig. 1a, the
requester sends a request for quote, rfq, to the
provider, and then waits for a quote. If the quote is
accepted, the requester will send an order to the
provider.
As in UMM, interactions have attributes, the
most important of which are the deadlines (“d”) of
the messages involved. If a message is not
sent/received before its deadline, the corresponding
interaction will fail, unless a timeout path is
provided. If an interaction fails, the whole
collaboration gets blocked; the parties, however, can
agree on a protocol for unblocking collaborations.
The scripts used in the annotations, i.e. “quote.d
= rfq.tq” and “order.d = t1.rfq.to”, mean that the
deadlines of messages quote and order will be set to
the values read from attributes tq and to of the rfq.
INTERACTION-ORIENTED COLLABORATIONS
203

Past messages can be used in the scripts as global
variables.
Timeout links introduce timeout paths, i.e. those
paths to be followed when interactions fail. In Fig. 1,
timeout links, i.e. the dashed links, lead to the sink
state, and hence conclude the collaboration. In fact,
the order is optional, and its absence is not a reason
for making the collaboration fail.
Collaboration ROa, shown in Fig. 1b, presents a
more complex protocol, in which a quote is assumed
to include a flag indicating whether it is negotiable
or not. After receiving a quote, the requester can
send a purchase order or, if the quote is negotiable, it
can send a revised request for quote. If the quote is
negotiable, two alternative paths are possible, one
consisting of interaction order and the other starting
with interaction rfq/quote.
The choice of a path can be either data-driven or
event-driven. In the first case, the choice must be
based on public information, visible to both parties:
such public information is given by the contents of
past messages, i.e. the messages exchanged by the
parties before the choice is made. In the second case,
the choice depends on the arrival of future messages.
When collaboration ROa is in state s1, a data-driven
choice takes place, depending on the contents of the
last quote. Transitions can have guards (“g”) and
priorities (“p”), whose default value is 0. If the quote
is negotiable, transition t3 fires, otherwise transition
order is enabled.
State s2 determines an event-driven choice. An
event-driven choice (also called deferred choice)
occurs when a place is followed by two or more
interactions in the same direction. While the sender
is free to select which message to send, the receiver
is assumed to be able to receive whichever message
will be sent, therefore the term “deferred choice”
expresses the viewpoint of the receiver.
In order to fire, a transition may require all its
input places to be marked (i.e. non-empty) or just
one; in the first case its parameter “in” is set to
“and” (the default value), and in the second case it is
set to “xor”. Transitions rfq/quote and order have
both a “xor” input behavior, as they have two input
places, which are never jointly marked.
3 LIGHT CHOREOGRAPHIES
Choreography usually denotes an a priori global
model meant to capture all the interactions taking
place for a given purpose among a number of
participants. As such it is a much debated notion. It
is often associated with the idea of a leading
organization having the authority of imposing the
required behavior on the participating organizations.
Three points of weakness have been pointed out
(Zhao, Liu and Yang, 2005): a leading organization
may not exist, a participant may be willing to select
its own partners, and participants are exposed to
unnecessary information.
This paper proposes a weaker notion of
choreography, called light choreography, which is
meant to complement binary collaborations.
Binary collaborations express necessary
precedence constraints on the interactions taking
place between pairs of participants; however
additional constraints might be needed. Light
choreographies are meant to make such additional
constraints explicit and public to all the parties
involved, so that each party can work out an
appropriate abstract orchestration model. A case
study requiring a light choreography is as follows.
The case study is a simplified supply chain
involving a buyer, a distributor and a supplier, which
are denoted by their initials, b, d and s.
The buyer sends a purchase order (bo = buyer
order) for certain goods to a distributor which can
fulfil the order in two ways: a) with one delivery (dd
= distributor delivery) coming from an internal
warehouse; b) with two deliveries, a distributor
delivery (dd) and an external delivery (sd = supplier
delivery) coming from an external supplier.
After receiving the buyer order, in case b, the
distributor selects a supplier with a reverse auction
similar to collaboration RO shown in Fig. 1a, and
then informs the buyer of the supplier selected with
a notification message (dn = distributor notification).
Message dn includes attribute deliveryN, whose
value can be 1 or 2; in case the value of deliveryN is
2, message dn also includes a reference to the
supplier involved. Then the buyer sends some
delivery information (bi = buyer information) to the
supplier, if it is the case.
After the deliveries have been performed, i.e.
messages dd and sd (if it is the case) have been
received by the buyer, the buyer makes a payment in
favor of the distributor and sends it a payment
notification (bp = buyer payment).
After delivering the goods to the buyer, the
supplier sends a payment request (sr = supplier
request) to the distributor; after making the payment
in favor of the supplier, the distributor sends a
payment notification (dp = distributor payment) to
the supplier.
For the sake of simplicity, deadlines and
exceptions are ignored.
ICEIS 2007 - International Conference on Enterprise Information Systems
204
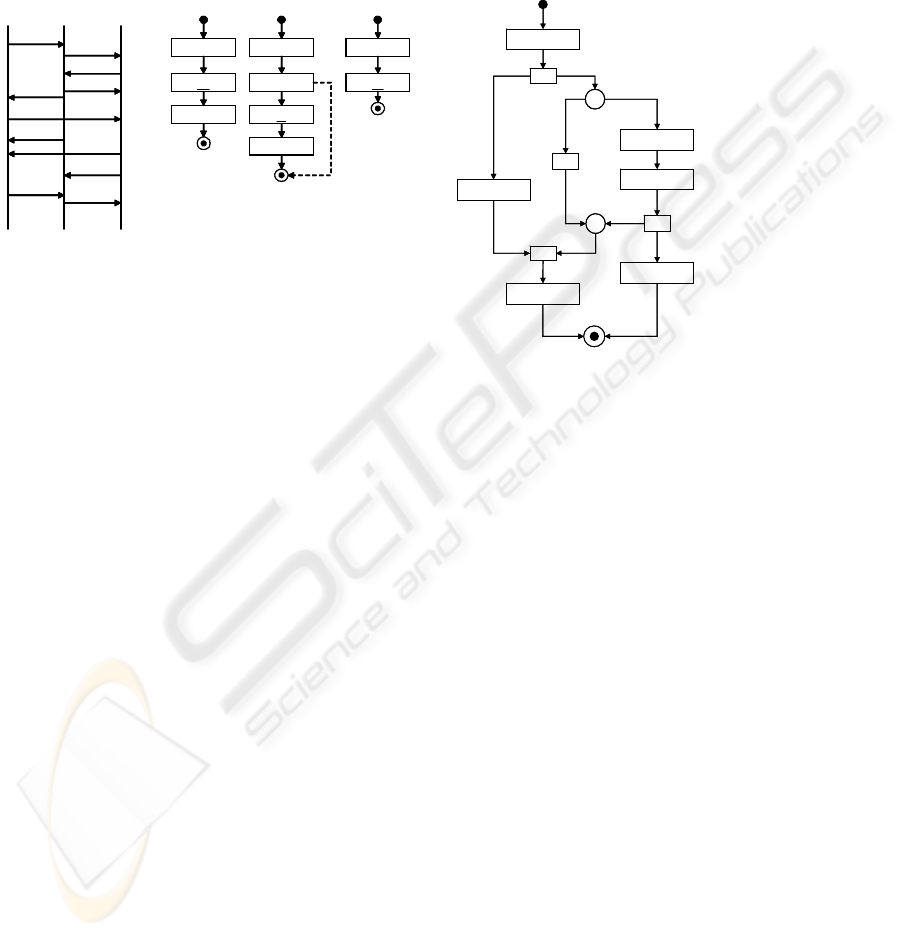
A business case with two deliveries is informally
presented in the sequence diagram shown in Fig. 2a.
Three binary collaborations are implied, i.e. BD,
DS and BS, as shown in Fig. 2b; they are identified
by the initials of the participants in capital letters,
the first letter denoting the requester. The
interactions, such as dd and sr, that are initiated by
the collaboration provider are shown underlined.
bd s
rfq
bo
dn
dd
bp
sr
dp
bi
sd
bo/dn
dd
bi
sd
bp
rfq/quote
sr
dp
BD
DS
BS
(a) (b)
quote
order
order
timeout
bd s
rfq
bo
dn
dd
bp
sr
dp
bi
sd
bo/dn
dd
bi
sd
bp
rfq/quote
sr
dp
BD
DS
BS
(a) (b)
quote
order
order
timeout
Figure 2: Sequence diagram (a) and binary collaborations
(b) for the case study.
This case study presents the routing pattern
called request with referral (Barros, Dumas and ter
Hofstede, 2005) as the buyer sends message bi to the
supplier that is indicated in message dn received
from the distributor.
The (light) choreography for the case study is
shown in Fig. 3; it is based on the binary
collaborations shown in Fig. 2b. A choreography
model is an ION with two additional annotations,
one defining the participants in terms of their roles,
and the other declaring the binary collaborations
needed.
This choreography involves three participants
denoted by their initials; if a message is meant to
contain a reference to a participant, this message is
shown next to that participant, as in the case of
message bd.dn, which is shown, within parentheses,
next to participant s.
The collaborations section lists the binary
collaborations needed along with the participants
involved and gives them suitable identifiers; as an
example, bd identifies collaboration BD taking place
between the buyer and the distributor. The
interactions in the choreography are preceded by the
appropriate collaboration identifiers, e.g. bd.dd and
bd.bo/dn.
The choreography shown in Fig. 3 features two
forks and one join. Fork f1 is needed because the
two deliveries may take place in any order. Fork f2
enables both join j1 and the request for payment (sr)
from the supplier. Join j1 is needed because the
payment in favor of the distributor is made after the
deliveries.
Place s1 determines a data-driven choice: if
attribute deliveryN of message bd.dn is equal to 1,
transition t10 fires and moves the token form s1 to
s2. In this case the buyer waits for the distributor
delivery only.
bd.bo/dn
bs.bi
bd.dd
bs.sd
bd.bp
ds.sr
Participants: b, d, s (bd.dn).
Collaborations: bd = BD(b,d), ds = DS(d,s), bs = BS(b,s).
Transitions: t10{g: bd.dn.deliveryN == 1; p = 1;}
f1
t10
s1
s2
f2
j1
bd.bo/dn
bs.bi
bd.dd
bs.sd
bd.bp
ds.sr
Participants: b, d, s (bd.dn).
Collaborations: bd = BD(b,d), ds = DS(d,s), bs = BS(b,s).
Transitions: t10{g: bd.dn.deliveryN == 1; p = 1;}
f1
t10
s1
s2
f2
j1
Figure 3: Light choreography for the case study.
The precedence between dd and bp in binary
collaboration BD is necessary but not sufficient; in
fact, the choreography shows that, when two
deliveries are needed, bp has to be preceded by sd,
as well. In this sense BD is a weak binary
collaboration, while RO and ROa shown in Fig. 1
are strong binary collaborations.
The solution given to the case study is based on a
number of considerations.
Firstly, choreographies do not replace binary
collaborations. The main reason is to expose only
the interactions needed for global coordination,
while those related to the details of binary protocols
are not revealed. In fact, the choreography shown in
Fig. 3 does not include interactions ds.rfq/quote and
ds.order, because they are of no interest for the
buyer. Moreover, interaction dp is not included in
the choreography, as it follows interaction sr on the
basis of binary collaboration DS. Binary
collaborations are needed as they drive the
implementation; a previous paper (Bruno and La
Rosa, 2006) has shown how to automatically
generate WSDL documents and BPEL processes
from binary collaboration models.
Secondly, choreographies are not global models;
they do not capture all the interactions taking place
for a given purpose, but only those necessary for
global coordination. A critical issue is the presence
INTERACTION-ORIENTED COLLABORATIONS
205
of several participants playing the same role: as a
matter of fact, several suppliers are involved in the
reverse auction conducted by the distributor. In such
situations, multiple interactions such as those
illustrated in the next section are likely to appear.
While a global model is meant to represent all of
them, in a choreography only one representative per
role is needed.
4 ABSTRACT ORCHESTRATION
MODELS
While collaboration models establish how the parties
have to interact so as to achieve a common goal, it is
up to each party to orchestrate (i.e. to combine) the
collaborations it is involved in. An abstract
orchestration model (AOM) fits that purpose. It
provides the so-called behavioral interface (Barros,
Dumas and Oaks, 2006) of a given participant, from
which an actual orchestration process can be
developed.
In this paper AOMs are meant to organize the
interactions pertaining to a given participant in a
proper control structure: hence they are still
interaction-oriented nets (IONs) enriched with
specific features, in particular multiple interactions
and nested interactions. They are abstract models,
for a number of details, as will be illustrated in this
section, are left unspecified.
bd.bo/dn
bs.bi
bd.dd
bs.sd
bd.bp
f1
t10
s1
s2j1
Partners: d, s (bd.dn).
Collaborations: bd = BD(self,d), bs = BS(self,s).
Transitions: t10{g: bd.dn.deliveryN == 1; p = 1;}
ds.rfq/quote
ds.sr
ds.dp
bs.sd
bs.bi
Partners: b, d.
Collaborations: ds = DS(d,self), bs = BS(b,self).
Transitions:
t1{quote.d = rfq.tq;}
t2{order.d = t1.rfq.to;}
(a)
(b)
ds.order
timeout
t1
t2
bd.bo/dn
bs.bi
bd.dd
bs.sd
bd.bp
f1
t10
s1
s2j1
Partners: d, s (bd.dn).
Collaborations: bd = BD(self,d), bs = BS(self,s).
Transitions: t10{g: bd.dn.deliveryN == 1; p = 1;}
ds.rfq/quote
ds.sr
ds.dp
bs.sd
bs.bi
Partners: b, d.
Collaborations: ds = DS(d,self), bs = BS(b,self).
Transitions:
t1{quote.d = rfq.tq;}
t2{order.d = t1.rfq.to;}
(a)
(b)
ds.order
timeout
t1
t2
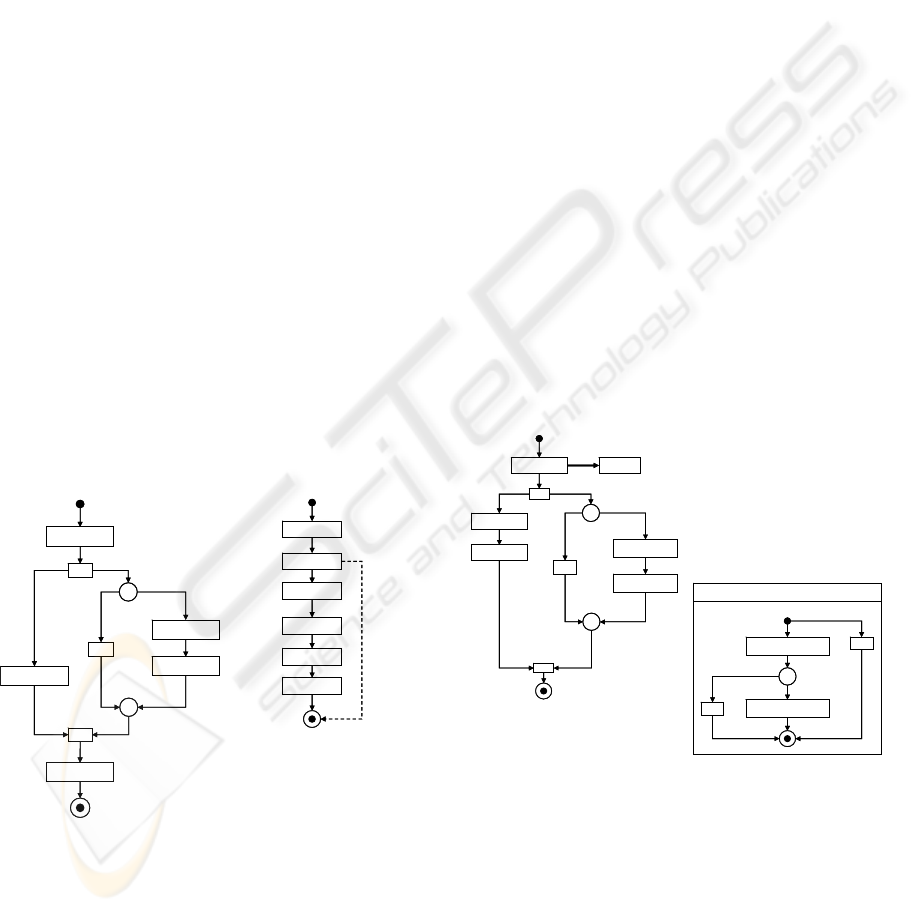
Figure 4: Abstract orchestration models of the buyer (a)
and of the supplier (b).
In Fig. 4 the buyer AOM and the supplier one
are presented, while the distributor AOM is shown
in Fig. 5.
Specific annotations list the binary
collaborations needed along with the other
participants.
The buyer interacts with a distributor and a
supplier; as the supplier is introduced by the
distributor to the buyer with message dn, this
message is shown in the partners section, next to the
supplier.
AOMs are based on binary collaborations; as
binary collaborations do not specify the specific
roles involved, it is the AOM task to declare which
binary collaborations it needs along with the role it
plays (self) and the role of the other participant. The
buyer is involved in two binary collaborations, bd
and bs, playing the requester role in both of them.
The distributor is involved in several
collaborations ds, each with a different supplier, as it
is supposed to conduct a reverse auction with them.
Notation “ds* = DS(self,s)*” defines ds* to be a
collection of similar collaborations (ds indicates one
of them).
The thick link from bd.do/dn to d1 in Fig. 5 is
the nesting operator used in AOMs: its source is a
two-way interaction and its destination is a
component AOM. In fact, the distributor, after
receiving a purchase order from the buyer and
before replying with a dn message, is meant to
operate as indicated in the nested AOM.
bd.bo/dn
bd.dd
bd.bp
d1
Partners: b, s*.
Collaborations: bd = BD(b,self), ds* = DS(self,s)*.
Transitions: t10{g: bd.dn.deliveryN == 1; p = 1;}
f1
ds.sr
ds.dp
t10
s1
j1
ds*.rfq/quote
ds.order
t2
t1
d1
s1
bd.bo/dn
bd.dd
bd.bp
d1
Partners: b, s*.
Collaborations: bd = BD(b,self), ds* = DS(self,s)*.
Transitions: t10{g: bd.dn.deliveryN == 1; p = 1;}
f1
ds.sr
ds.dp
t10
s1
j1
ds*.rfq/quote
ds.order
t2
t1
d1
s1
Figure 5: Abstract orchestration model of the distributor.
Transitions t1 and t2 in d1 are abstract, for there
are no annotations associated with them. In fact, t1 is
meant to fire if the distributor decides not to involve
any supplier, and t2 is meant to fire if it decides not
to accept any of the quotes received. In both cases,
only the distributor delivery will take place.
Interaction ds*.rfq/quote is called a multiple
interaction and indicates a multiplicity of
interactions rfq/quote each taking place between the
ICEIS 2007 - International Conference on Enterprise Information Systems
206

distributor and a different supplier. The exact way
(e.g. in parallel or in sequence), in which such
interactions will be performed, is an implementation
detail and the AOM is not concerned with such
aspects. After those interactions have been
completed, the buyer is meant to select the best
quote and, if there is any, it will send an order to the
corresponding supplier.
While it is possible (Barros, Dumas and Oaks,
2006) to automatically obtain an orchestration model
for each participant from a choreography model, this
paper, nevertheless, considers binary collaborations
to be essential, for two reasons.
Firstly, they enforce the protocol at the lower
level. In fact, binary collaborations can give rise to
run-time entities which maintain the state of the
actual collaborations. This is particularly useful
when multiple collaborations are involved. In fact,
the orchestration process of the distributor could
mistakenly send the order to a supplier that did not
provide any quote. Therefore the run-time checks
performed by a run-time collaboration entity can
prevent a process from sending or receiving a
message in wrong order (or not complying with
timing constraints).
Secondly, run-time collaboration entities can
implement the proper interaction protocol (based on
timeouts and retrials) thus relieving the orchestration
processes of this burden.
5 CONCLUSION AND FUTURE
WORK
This paper has presented a modeling notation, called
Interaction-Oriented Nets (IONs), which addresses
binary collaborations, light choreographies and
abstract orchestration models (AOMs)
homogeneously.
Current work proceeds in several directions.
While binary collaborations are well understood, in
choreographies and in AOMs there are still several
issues to be settled.
Choreographies are subject to well-formedness
rules, which are related to their particular use. As an
example, it does not make sense to say that an
interaction between x and y precedes an interaction
between w and z (with x, y, w and z indicating
different participants), as there is no way to enforce
that precedence, without the participants being
coordinated by a central entity.
Choreographies and binary collaborations have
joint operational purposes. Each participant can
obtain an AOM from them, as shown in Fig. 4 and in
Fig. 5, and then it can complete it with internal
activities. AOMs have to be validated against the
choreographies and the binary collaborations they
are based on. Moreover, a first-cut AOM can be
automatically obtained from a choreography model,
and then manually enriched. As an example, the
buyer AOM shown in Fig. 4 can be easily obtained
from the choreography presented in Fig. 3 by means
of suitable reduction rules.
REFERENCES
Barros, A., Dumas, M., ter Hofstede, A.H.M., 2005.
Service interaction patterns. In Lecture Notes in
Computer Science, 3649, 302-318. Springer. Berlin.
Barros, A., Dumas, M., Oaks, P., 2006. Standards for web
service choreography and orchestration: status and
perspectives. In Lecture Notes in Computer Science,
3812, 61-74.
Bruno, G., La Rosa, M., 2006. From collaboration models
to BPEL processes through service models. In Lecture
Notes in Computer Science, 3812, Springer. Berlin.
Damodaran, S., 2004. B2B Integration over the Internet
with XML – RosettaNet successes and challenges.
Retrieved February 20, 2007, from
http://doi.acm.org/10.1145/1013367.1013398.
BPSS, 2001. Business Process Specification Schema,
Version 1.01. Retrieved February 20, 2007, from
http://www.ebxml.org/specs/ebBPSS.pdf.
Lind, M., Goldkuhl, G., 2003. The constituents of business
interaction - generic layered patterns. Data &
Knowledge Engineering, 47, 327–348.
Orlowska, M.E., Schulz, K.A., 2004. Facilitating cross-
organisational workflows with a workflow view
approach. Data & Knowledge Engineering, 51, 109-
147.
UMM, 2003. UN/CEFACT Modeling Methodology
(UMM) User Guide. Retrieved Retrieved February 20,
2007, from http://www.unece.org/cefact/umm/
UMM_userguide_V20030922.pdf.
van der Aalst, W.M.P., Weske, M., 2001. The P2P
approach to Interorganizational Workflows. In Lecture
Notes in Computer Science, 2068, 140-156. Springer.
Berlin.
WS-CDL, 2005. Web Services Choreography Description
Language, Version 1.0. Retrieved February 20, 2007,
from http://www.w3.org/TR/ws-cdl-10/.
Zhao X., Liu C., Yang Y., 2005. An organisational
perspective on collaborative business processes. In
Lecture Notes in Computer Science, 3649, 17-31.
Springer. Berlin.
INTERACTION-ORIENTED COLLABORATIONS
207
