
CONTEXT-BASED INTELLIGENT EDUCATIONAL SYSTEM FOR
CAR DRIVERS
Juliette Brezillon, Patrick Brezillon, Thierry Artieres
LIP6, University Paris 6, 104 avenue du President Kennedy, 75016, Paris, France
Charles Tijus
Cognition et Usages, University Paris 8, 2 rue de Liberte, 93526 SaintDenis Cedex 02, France
Keywords:
Driver modeling, Cognitive Sciences, Machine Learning, Context, Situation Awareness.
Abstract:
Although a driving licence concludes training, such an initial is insufficient because new drivers do not know
how to contextualize the learned procedures into effective practices. Our goal is to improve the drivers’
situation awareness, in which the drivers perceive the environment’s events and the projection of their status
in a close future. To achieve this goal, we design an educational system for the drivers, which help them to
become aware of their driving errors. This educational system aims to identify and correct drivers’ drawbacks.
In this paper, we discuss the reasons for associating two approaches: a local approach (resulting from cognitive
sciences) and a global approach (resulting from machine learning), and we show the key role that context plays
in the driving activity.
1 INTRODUCTION
Car driving is a complex activity that needs practical
experiments to be safe. Initial training required a driv-
ing license that appears insufficient because young
drivers do not know how to contextualize the learned
procedures in effective practices. A reason is that
learners are always with a car instructor that moni-
tors (and corrects) their actions. Thus learners rely on
this support and do not develop an efficient awareness
on the driving task.
As a consequence, novice drivers are propor-
tionally more involved in accident than experienced
drivers. Inexperience concerns several aspects of
drivers’ cognition, but the main factor of novice
drivers’ errors is an inadequate mental representation
of the driving situation. The learner does not consider
the relevant contextual cues related to his driving task.
Indeed, driver’s decision making is not based on the
objective state of the world, but on a mental model
of the driving task and the conditions to accomplish
this task. This mental model is a circumstantial repre-
sentation of (Richard, 1990) built in a working mem-
ory from perceptive information extracted in the road
scene, and form permanent knowledge stored in the
long-term memory.
This representation provides a meaningful and
self-oriented interpretation of the reality, including
anticipation of potential evolutions in the current driv-
ing situation. From this point of view, this corre-
sponds to the driver’s Situation Awareness, (Endsley,
1995): ”The perception of the elements in the envi-
ronment within a volume of time and space, the com-
prehension of their meaning, and the projection of
their status in the near future”. Moreover, this men-
tal representation is ”action-oriented” (i.e. the driver
is an actor not a witness). Mental representations
are a key element of the driver’s cognition. An er-
roneous representation means, potentially, decision-
making errors and unsafe driving actions. Hereafter,
the paper is organized as follow: the first part aims
to explain the previous works our project is based
on. The following part describes the global and lo-
cal methods that are used in this project. The third
part gives our viewpoint about the context. The last
section presents the first results of our project, which
are an errors-based drivers’ typology and the choice
of a case study.
403
Brezillon J., Brezillon P., Artieres T. and Tijus C. (2007).
CONTEXT-BASED INTELLIGENT EDUCATIONAL SYSTEM FOR CAR DRIVERS.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - AIDSS, pages 403-406
DOI: 10.5220/0002366204030406
Copyright
c
SciTePress

2 PREVIOUS WORKS
2.1 Gadget Project
The GADGET, acronym for ”Guarding Automobile
Drivers through Guidance Education and Technol-
ogy”), project (Siegrist, 1999) was a European project
about safety road. It aims to assess traffic safety mea-
sures on driver behavior; analyze the influence of in-
car safety devices, various road environments, educa-
tion and training programmes, safety campaigns, and
legal measures (including enforcement) on driver be-
havior. This project stars from the work of (Van der
Molen, Btticher, 1988) who split driving tasks and
driving behavior into three hierarchic levels: Strategic
level, Maneuvering level or Tactical level and Con-
trol or operational level. In the GADGET matrix,
later also referred to as the GDE matrix, a fourth level
was, however, added above the other three, the Polit-
ical level. We make the assumption in our work that
GADGET methodology can be revisited at the light of
the notion of context. We make the assumption that
all the variables in the GAGDET matrix can be used
to describe the context of the driving activity.
2.2 Other Study
Another work on which we based ourselves on is the
work of (Young, 2006) which shows that it’s better to
learn from errors than from successes. The study ex-
amines whether error exposure training can enhance
adaptive performance. Fifty-nine experienced fire-
fighters undergoing training for incident command
participated in the study. War stories were developed
based on real events to illustrate successful and un-
successful incident command decisions. Two training
methodologies were compared and evaluated. One
group was trained using case studies that depicted in-
cidents containing errors of management with severe
consequences in fire-fighting outcomes (error-story
training) while a second group was exposed to the
same set of case studies except that the case studies
depicted the incidents being managed without errors
and their consequences (errorless-story training). The
results provide some support for the hypothesis that it
is better to learn from other people’s errors than from
their successes. That’s why we based our driver’s ty-
pology on driving’s errors.
3 GLOBAL AND LOCAL
METHODS
The main idea of the project is to associate global
method resulting from machine learning and local
methods resulting from cognitive sciences. The idea
to associate global and local methods comes from the
limitations of each method. Indeed, the local method
performed very well to describe a driver’s behavior at
the highest levels (in the most general way) but can
not describe a driver’s behavior on the lower levels
since it must take into account too much variables.
We have the opposite problem in the global methods.
They analyse very poor data (from the lower levels)
and infer some more general information. But they
are limited and can’t describe drivers’ behavior at the
upper levels. The global methods can only give gen-
eral information on the driver’s behavior in their driv-
ing task, whereas there is a high individual variabil-
ity in this kind of study since each driver is a par-
ticular case who acts with a set of contextual cues
highly personal that differ one from all other. More-
over, one driver can present very different behaviors
for the same driving task since the contexts in which
he is doing this task can be very different. Thus, a
global method constructed from every day life’s data
allows establishing a driver classification in reality,
which has to be completed by a local method. In this
way, we hope to be able to describe a driver at all the
levels in the same time. The association of the two
approaches allows modeling the driver at all the lev-
els of the matrix proposed in the GADGET method-
ology. Thus we solve some problem found in litera-
ture which are the facts that some studies analyze the
driver at one level at the time; for example they stud-
ies at the tactical level. But each level depends on
highest levels, what is a limit of the other studies.
4 FIRST RESULTS
4.1 Driver’s Risky Behaviors Typology
Our driver’s typology, based on driver’s risky behav-
ior, is resulting from a questionnaire. This question-
naire has been made by taking all the variables in the
GADGET matrix, completing by others we thought
was missing, and by organizing them not by layers
as it was usual to do, but by type. The question-
naire was then done to implements 61 variables (is-
sues from GADGET and complete by ourselves). It
has 162 questions, there are thus some reformulations
in the questions to stage the skew of the morality of
ICEIS 2007 - International Conference on Enterprise Information Systems
404
the driver and to determine if it lies or not. To stage
this skew, we also guided the questions about the facts
while trying to ask for the least most often possible
the opinion of the driver about his own behavior. The
results show here are issues from the first 214 partic-
ipants to that questionnaire. From this data, we ex-
tract 16 classes, by doing a principal composant anal-
ysis to reduce the 61 variables to 3, and we classify
these new data thanks to the agglomerative methods
in 16 classes. We then identify for each class variables
which describe the class; they are variable which has
a specific value in that class and another value in the
others classes. We after determine for each class the
specific variables which are relative to risky features
and behaviors. Here are these variables for each class:
1: driver does not think of managing the unfore-
seen situations and do not plan its way
2: driver feels to develop by his driving
3: driver already was under the effect of tiredness
and alcohol in his driving
4: driver already was under the effect of alcohol
5: driver thinks of having basic competences to
drive, missing automatism, driving in bad mood, feels
to develop by his driving, and drive to decompress
6: driver has tendency to risks and is accustomed
to taking risks
7: driver has tendency to risks and is accustomed
to taking risks, does not always control the trajectory
of its vehicle, does not always put its indicators, miss
automatism, drive in bad mood, does not always make
good prediction in the evolution of the driving situa-
tion and feels to develop by his driving
8: driver doesn’t thinks to have basic competences
to drive, does not always put its indicators and does
not always control the trajectory of its vehicle
9: driver already was under the effect of alcohol
and drugs, and has already have an aggressive behav-
ior in his driving
10: driver does not always make good prediction
in the evolution of the driving situation
11: driver thinks he has a driving style and feels
to develop by his driving
12: driver does not think of managing the unfore-
seen situations and does not always make good pre-
diction in the evolution of the driving situation
13: driver does not consider his car like a purely
functional instrument
14: driver is an amateur of races of cars, at search
of strong feelings, and already has an aggressive be-
havior in his driving
15: driver doesn’t thinks to have basic compe-
tences to drive; he thinks he misses automatisms and
does not always make good prediction in the evolu-
tion of the driving situation
16: the driver do not think of managing the un-
foreseen situations, doesn’t thinks to have basic com-
petences to drive, doesn’t drive if there is fog, or snow,
or glaze, if the traffic is dense, already was under the
effect of alcohol and drugs, does not always make
good prediction in the evolution of the driving situ-
ation, thinks he has a driving style, has already have
an aggressive behavior in his driving, does not see the
road as a social space and is not sensitive to social
pressure.
This typology of drivers’ errors is the first step of
our work. We aim further to identify a driver’s behav-
ior in this typology to analyses his drawbacks and to
help him to improve his situation awareness by cor-
recting this drawbacks thanks to adapted scenarios on
simulation.
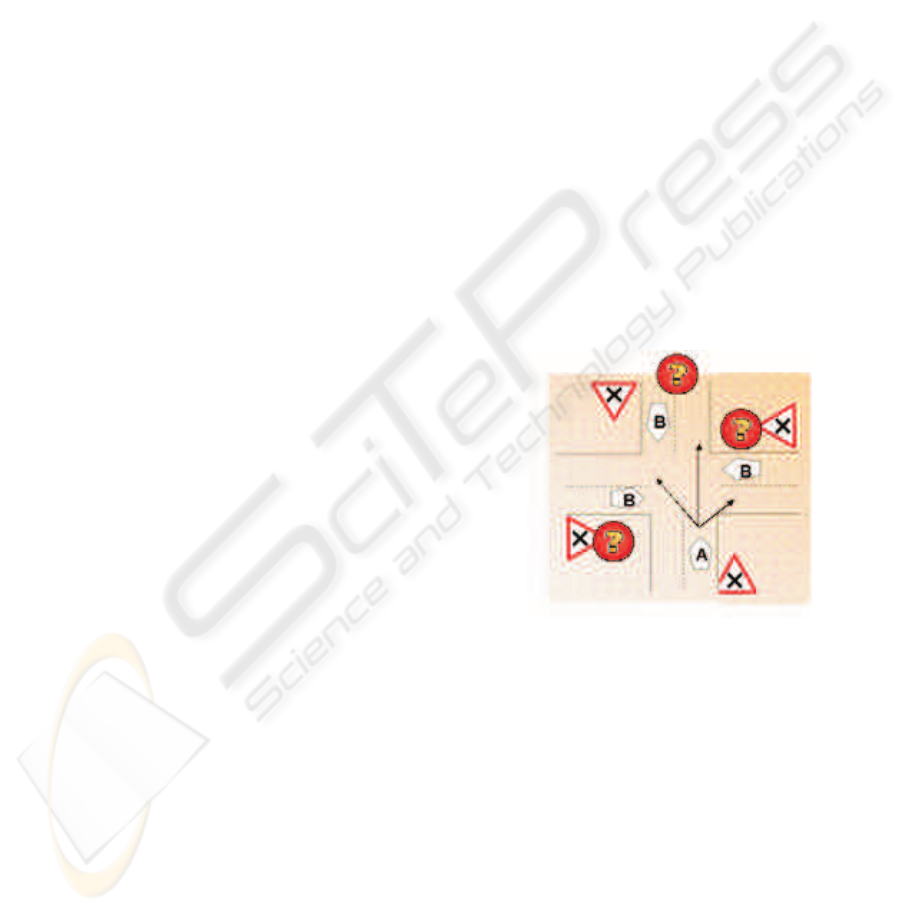
4.2 The Case Study of Our
Experimentation
We take a real traffic situation -a simple crossroad-
and try to analyze all the driving situations that can
happen. We assume only two cars arriving to the
crossroad. We select the viewpoint of the driver of
Figure 1: Real situation driving.
car A (coming from the bottom), and analyze all the
options, first, according from where is coming the car
B (from the left, the right or in front of car A), and sec-
ond, according to the movement of the two cars (turn
left, straight ahead, or turn right) at the crossroad. We
model all the behaviors by contextual graphs. In the
retained traffic situation, each road has a ”Yield” sign.
This means that no priority has been defined and the
rule is ”priority to the car on the right side”. This
crossroad can leads to 27 initial traffic situations, ac-
cording from where is coming car B and where are
going the two cars. After defining our real driving sit-
uation, we model with contextual graphs: topology of
the crossroad, road sign position, theoretical behavior
of the drivers, possible behaviors of the drivers.
CONTEXT-BASED INTELLIGENT EDUCATIONAL SYSTEM FOR CAR DRIVERS
405

The topology of the road show how the law de-
cides that a crossroad needs a yield road sign. This
takes into account the specificity of a crossroad, and
the visibility to evaluate that needs. The road sign
position means that once we have established that a
crossroad has the need of a yield sign, we have to de-
termine the position where it would be. This model
shows that the position will be not the same in a city
or in countryside. Since the chosen crossroad has no
special priority, the law defines the ’theoretical” be-
havior as ”to yield the emerging passage to the vehi-
cles of right-hand side, by having a special vigilance
and a deceleration adapted to the announced danger.”
There are some restrictions with this panel: the trams
have right of way and if the topology of the cross-
roads obliges it, a special panel added to the first defi-
nite the priority. The theoretical behavior established
from the law texts is to check that the roadway to
cross is free, to circulate with a moderate speed es-
pecially if the conditions of visibility are worse, in
the event of need, to announce our approach, must
engage in an intersection only if our vehicle does not
risk to be immobilized in the crossroad area and to an-
ticipate the passage of the vehicles circulating on the
other ways. There are two successive parts: the anal-
ysis of the situation and the process of the decision
making itself. Possible behaviors have been analyzed
start from what can happen concretely in that cross-
road that is not planned by the law. First, the car’s
driver, which has not the priority, does not stop and
enters the crossroad, because for instance, the car’s
driver thinks that he has time to pass before the other
car, or he didn’t see it. Then, he can realize that he’s
making a mistake and decides to stop in the middle
of the crossroad. The other car attempts to avoid him.
Moreover, the two car’s drivers can break down. If
a car’s driver breakdown, the other car’s driver will
have to wait until the other starts again and leave the
crossroad, or decides to overtake it. If the driver over-
takes, the first car can start again and realize the other
car is in front of him and try to avoid him. Or maybe,
the other car’s driver was not attentive and didn’t see
that the car driver breaks down, thus he will has to re-
act at the time he will realize the problem, and he has
still some. We determine, thanks to this case study,
the drawbacks of the driver behavior. We have sev-
eral possible scenarios on this situation and each is
linked to class of our errors-based driver’s typology.
For example, the driver who is not attentive (and who
belongs to the class 12 on our typology) would make
the scenario in which he would not see the other car
on the crossroad. With the correlation, we are able
by making pass this specific driving situation to any
driver to identify his drawbacks and his errors in his
driving thanks to our typology and we would be able
to help any driver to improve his situation awareness.
5 CONCLUSION
Driver modeling is an important domain that interests
a number of administrations (for a uniform road se-
curity in European countries, for the police for inter-
preting correctly drivers’ behaviors, for associations
wishing introducing some changes. etc.). This is also
an interesting field of investigation for AI researchers.
Our contribution brings at least three new insights on
this hot topic. First, we propose ”driver’s based” clas-
sification of drivers and not an arbitrary classification.
Second, we propose an open modeling in the sense
that it is possible to incrementally acquire new behav-
iors of drivers. Third, we use good and bad practices
for driver’s self-learning, bad practices being mainly
used by the system for identifying what is doing a
given driver, and how to help him to correct his be-
havior.
REFERENCES
Brezillon, P. (2003), Context dynamic and explanation
in contextual graphs. In: Modeling and Using
Context (CONTEXT-03), P. Blackburn, C. Ghidini,
R.M. Turner and F. Giunchiglia (Eds.). LNAI 2680,
Springer Verlag Verlag, , pp. 94-106.
Endsley, M. R. (1995), Toward a Theory of Situation aware-
ness in Complex Systems. Human Factors.
Richard J. F. (1990), Les activits mentales. Comprendre,
raisonner, trouver des solutions. Paris.
Schank, R. C. (2003), Dynamic memory, a theory of learn-
ing in computers and people Cambridge University
Press.
Siegrist, (1999), Rapport GADGET, Formation et valuation
du conducteur, obtention du permis de conduire. Vers
une gestion thoriquement fonde du risque routier des
jeunes conducteurs. Rsultats du projet europen GAD-
GET - Groupe de travail N3, Stefan SIEGRIST (ed.)
Berne 1999.
Van der Molen, H. H. Botticher, A. M. T. (1988) A hierar-
chical risk model for traffic participants. Ergonomics.
Young, W., Hesketh, B., Neal, A. (2006), Using ”War Sto-
ries” to Train for Adaptive Performance: Is it Better to
Learn from Error or Success?, Applied Psychology.
ICEIS 2007 - International Conference on Enterprise Information Systems
406
