
SPEECH SEGMENTATION IN NOISY STREET ENVIRONMENT
Jaroslaw Baszun
Department of Real Time Systems, Faculty of Computer Science
Bialystok University of Technology, Wiejska Str. 45A, 15-351 Bialystok, Poland
Keywords:
Voice activity detector.
Abstract:
Two voice activity detectors for speaker verification systems were compared in this paper. The first one
is single-microphone system based on properties of human speech modulation spectrum i.e. rate of power
distribution in modulation frequency domain. Based on the fact that power of modulation components of
speech is concentrated in a range from 1 to 16 Hz and depends on rate of syllables uttering by a person.
Second one is two-microphone system with algorithm based on coherence computation. Experiments shown
superiority of two-microphone system in case of voiced sounds in background.
1 INTRODUCTION
Reliability is the most important issue in practical
applications of speech-based applications including
speech recognition, speaker verification or speech en-
coding. The main function of a voice activity de-
tector (VAD) is to indicate speech presence and pro-
vide delimiters for the beginning and end of speech
segment to facilitate speech processing. Traditional
VAD’s have relied on the observation that noise is
usually stationary or slowly-varying and can be es-
timated during speech pauses. In devices working in
real acoustic environments like streets in centers of
big cities this assumption is not true. In such environ-
ments many types of noises interfere with speech and
reduce recognition performance.
Most single-microphone systems are based on
identifying pauses between speech and computing
noise estimate in the pauses. The problem is that the
noise estimate is not updated during the speech. Such
solution (Sovka and Pollak, 1995) work well in case
of stationary and slowly-varying noise, but gives false
response to fast time-varying noise. Another prob-
lem is that noise estimate depends on performance of
the voice activity detector. If the noise is rapid time-
varying or speech-like sound the noise estimate is not
properly updated and the system fails.
Some techniques of computing noise estimate like
minimum statistics (Martin, 2001) or use of nonlin-
ear estimate of noise power (Doblinger, 1995) allows
overcome problem of noise estimation, but fails in
case of speech-like noise. An alternative approach
shown in this paper is based on filtration of spectral
envelopes of speech signal split into number of bands.
This method allows for effective continuous noise es-
timation and has good performance in non-stationary
noise. Based on the fact that power of modulation
components of speech is concentrated in a range from
1 to 16 Hz (Houtgast and Steeneken, 1985) and de-
pends on rate of syllables uttering by a person, it is
possible to separate speech like sounds from noises
(Hermansky and Morgan, 1994)(Atlas and Shamma,
2003). This separation can be carried out by bandpass
filtration of spectral envelops.
Single-microphone system was compared to two-
microphone system with algorithm based on coher-
ence computation. Two-microphone solution exploits
the physical characteristics of real noises which are
globally diffused. This implies a weak spatial coher-
ence of such sources in compare to almost punctual
source speech signal such like a person talking from
short distance in front of microphones.
A number of experiments were carried out to com-
pare both systems and asses their usefulness for intel-
ligent cash machine working in noisy street environ-
ment.
432
Baszun J. (2007).
SPEECH SEGMENTATION IN NOISY STREET ENVIRONMENT.
In Proceedings of the Second International Conference on Signal Processing and Multimedia Applications, pages 422-427
DOI: 10.5220/0002139704220427
Copyright
c
SciTePress
2 SINGLE-MICROPHONE
SYSTEM BASED ON
FILTERING OF SPECTRAL
ENVELOPES
The first considered system exploits modulation spec-
trum properties of human speech. It is know that low-
frequency modulations of sound are the carrier of in-
formation in speech (Drullman et al., 1994)(Elhilali
et al., 2003). In the past many studies were made
on the effect of noise and reverberation on the hu-
man modulation spectrum (Houtgast and Steeneken,
1985)(Houtgast and Steeneken, 1973) usually de-
scribed through modulation index (MI) as a mea-
sure of the energy distribution in modulation fre-
quency domain i.e. normalized power over modula-
tion for a given frequency band at dominant modula-
tion frequencies of speech. MI vary between anal-
ysis frequency bands. The corrupting background
noise encountered in real environments can be sta-
tionary or changing usually different in compare to
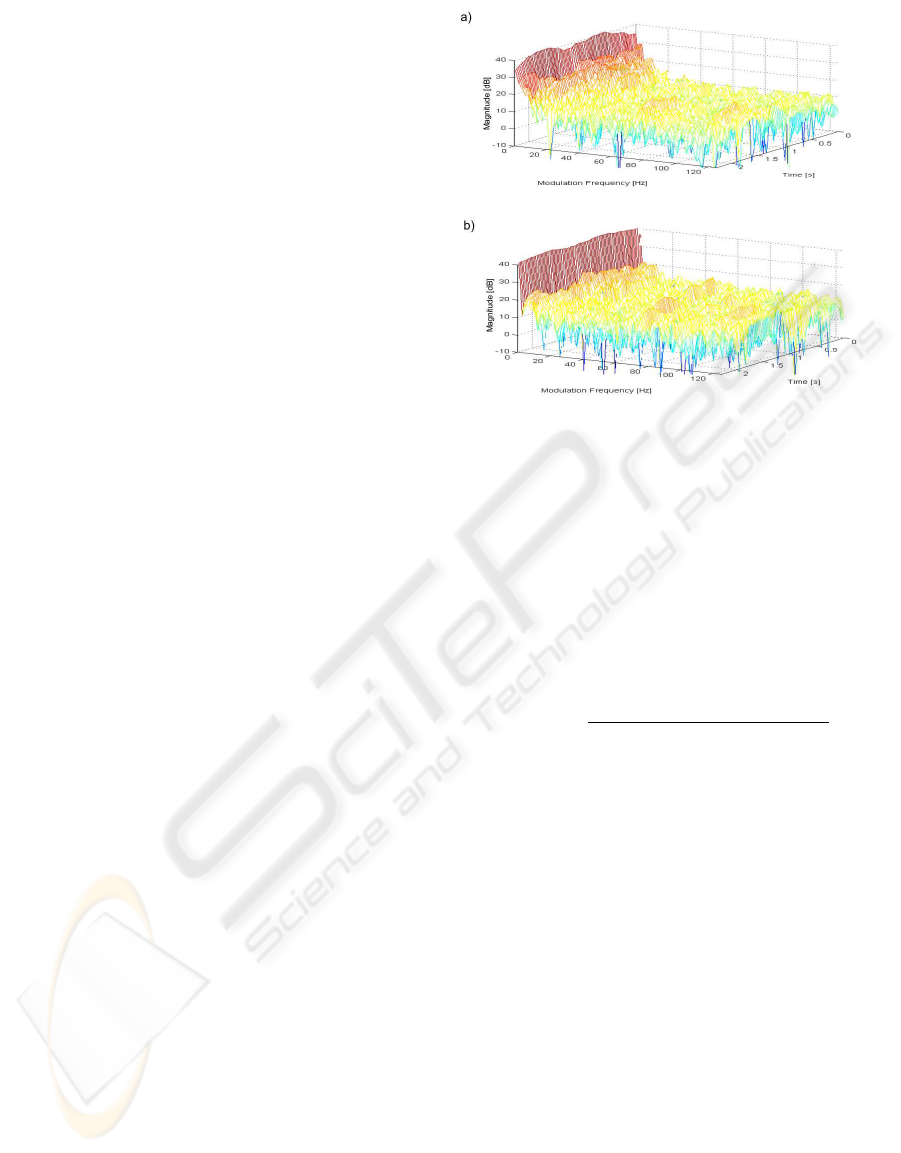
the rate of change of speech. Relevant modulation
frequency components of speech are mainly concen-
trated between 1 and 16 Hz with higher energies
around 3 − 5 Hz what corresponding to the num-
ber of syllables pronounced per second (Houtgast
and Steeneken, 1985), see Fig. 1. Slowly-varying or
fast-varying noises will have components outside the
speech range. Further, steady tones will only have
MI constant component. System capable of track-
ing speech components in modulation domain are
very promising in many fields of speech processing
(Thompson and Atlas, 2003)(Hermansky and Mor-
gan, 1994)(Baszun and Petrovsky, 2000)(Mesgarani
et al., 2004).
2.1 System Description
The idea of the system was based on work on speech
enhancement systems (Baszun and Petrovsky, 2000)
based on modulation of speech and its version uti-
lizing Short Time Fourier Transform (STFT) analysis
was detailed described in (Baszun, 2007).
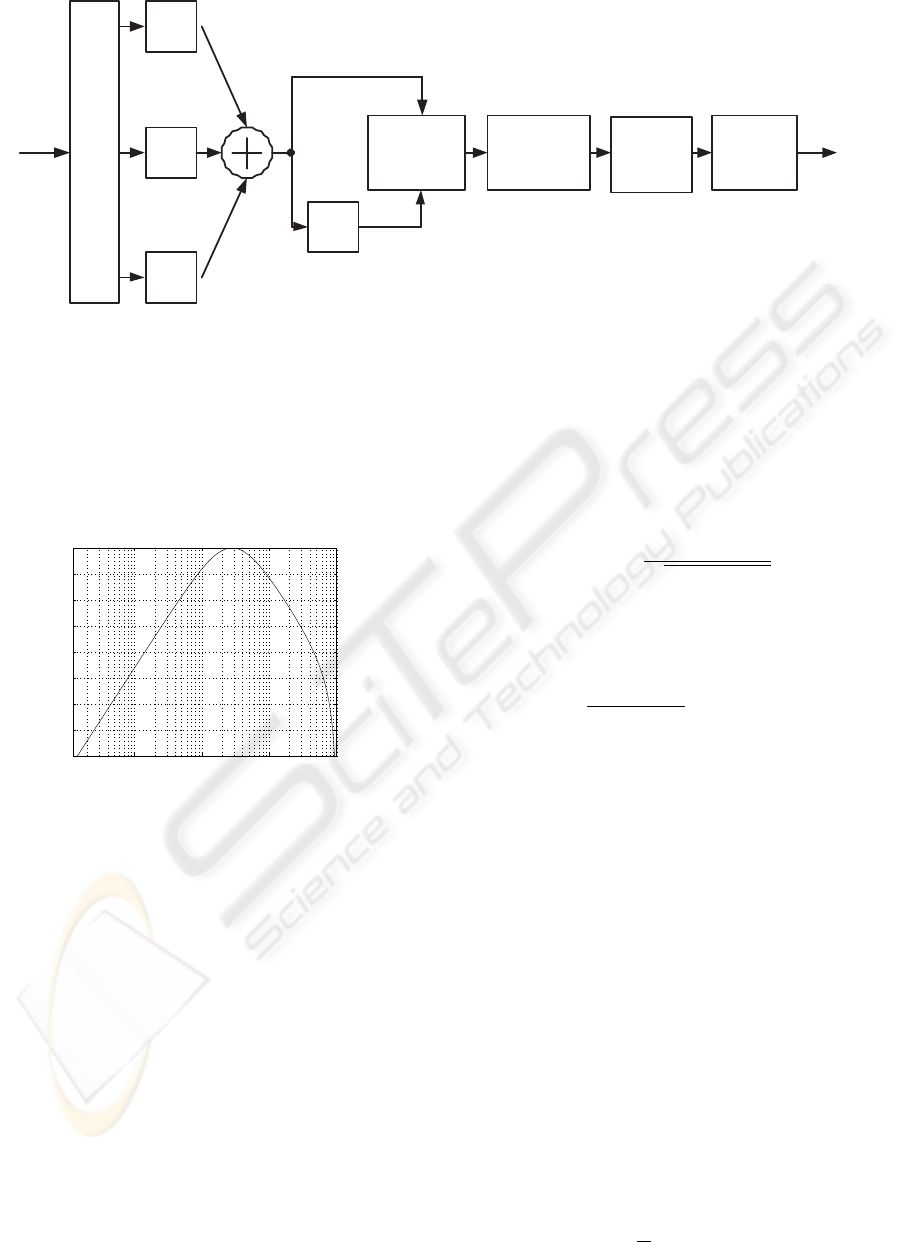
The block diagram of modified system was shown
in Fig. 2. In this approach signal from microphone
with sampling frequency 16 kHz is split into M = 64
frequency bands using polyphase uniform DFT analy-
sis filter. This allows for better separation of adjacent
channels in compare to analysis based on STFT. Next
amplitude envelope is calculated for first 33 bands
except first band corresponding to frequencies below
250 Hz in speech signal.
Amplitude envelope is summed for all bands and
Figure 1: Changes of modulation spectrum in passband
from 2375 Hz to 2625 Hz: a) clear speech; b) speech with
noise SNR = 10 dB.
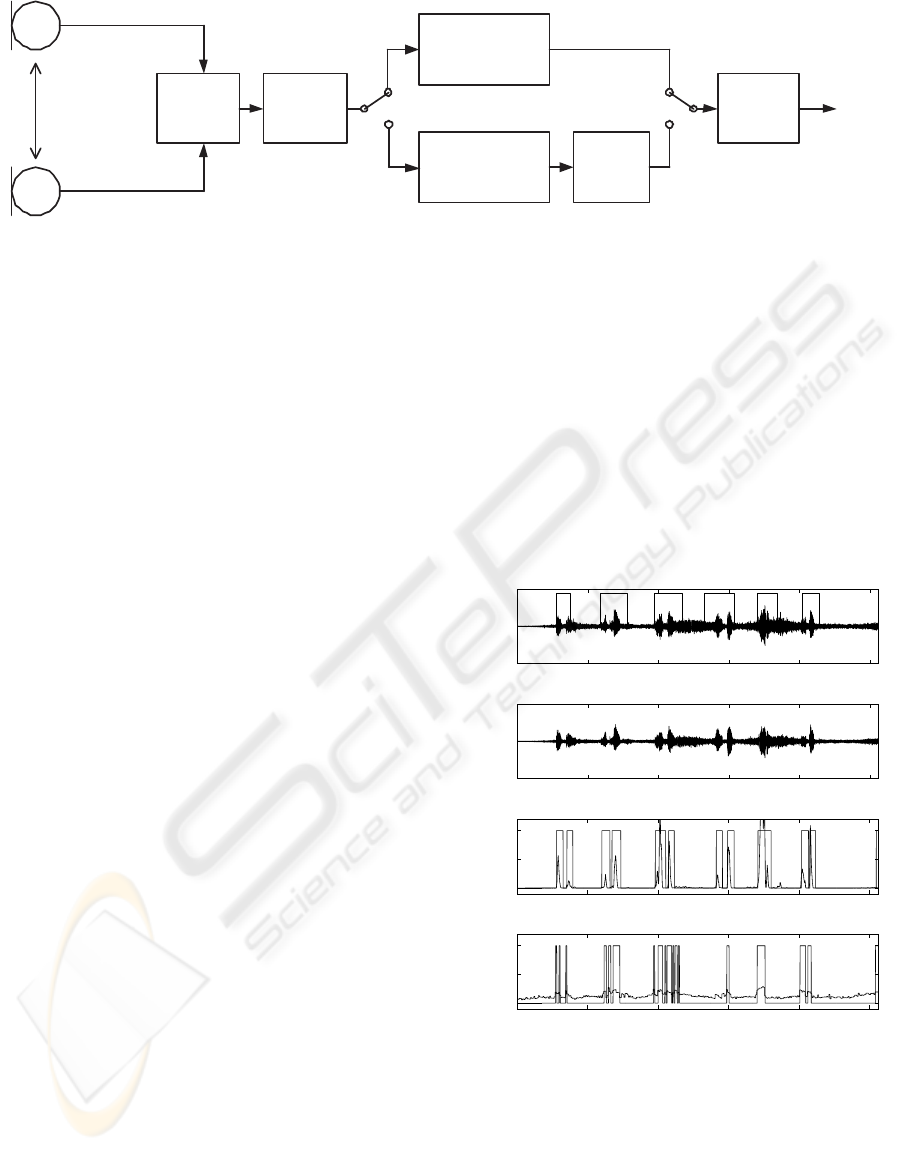
filtered by passband IIR filter with center frequency
3.5 Hz and frequency response shown in Fig. 3. The
output of the filter is half-wave rectified to remove
negative values from output of the filter. The follow-
ing computation is carried out on the filtered and not
filtered envelope:
S(nM) =
Y
′
Y − mean(Y) −Y
′
− mean(Y
′
)
(1)
Above parameter is an estimate of speech to noise
ratio of analyzed signal. Mean value of filtered and
nonfiltered envelope is computed based on exponen-
tial averaging with time constant approximately 1 s.
The square of this estimate is used as a classification
parameter for voice activity detector. Speech decision
is based on comparison between classification param-
eter and the threshold computed based on the follow-
ing statistics (Sovka and Pollak, 1995):
Thr = mean(d) + α· std(d) (2)
where d is a classification parameter and α con-
trols confidence limits and is usually in the range 1 to
2, here was set to be equal 2. Both mean value and
standard deviation is estimated by exponential aver-
aging in pauses with time constant a = 0.05. Frame is
considered to be active if value of classifier is greater
than threshold. To avoid isolated errors on output
caused by short silence periods in speech or short
interferences correction mechanism described in (El-
Maleh and Kabal, 1997) was implementing. If current
state generating by the VAD algorithm does not differ
SPEECH SEGMENTATION IN NOISY STREET ENVIRONMENT
433
Polyphase Analysis Filter Bank
x(n)
speech
+ noise
| . |
| . |
| . |
M=64
| . | - Amplitude envelope computation
MF - Modulation filter
MF
Speech to
noise
estimate
computation
.
.
.
.
.
.
Threshold
computation
Speech/
pause
detection
Correction
algorithm
Speech/
pause
decision
y
2
(nM)
y
k
(nM)
y
M/2
(nM)
Y(nM)
Y’(nM)
S(nM)
Figure 2: Block diagram of voice activity detector based on filtering of spectral envelopes.
from n previous states then current decision is passed
to detector output otherwise the state is treated as a
accidental error and output stays unchanged.
10
−3
10
−2
10
−1
10
0
−40
−35
−30
−25
−20
−15
−10
−5
0
dB
Normalized freq.
Figure 3: Magnitude frequency response of modulation fil-
ter (MF).
3 TWO-MICROPHONE SYSTEM
Two-microphone VAD system exploits the physical
characteristics of real noises which are globally dif-
fused. This implies a weak spatial coherence of
such sources in compare to almost punctual source
speech signal such like a person talking from short
distance in front of microphones (Martin and Vary,
1994). The system was motivated by paper (Guerin,
2000). Two omnidirectional matched microphones
were used. Microphones were mounted in distance
of 40 cm. The speaker was located in 20 to 40 cm
from the center of two microphones. In Fig. 4 block
scheme of the system was shown. Sampling fre-
quency for two channels was 16 kHz, 16 bit/sample.
Magnitude squared coherence function was computed
for 512 points without overlapping. This function be-
tween two wide-sense stationary random processes x
and y is defined as follows (Carter, 1987):
γ
xy
(ω) =
P
xy
(ω)
p
P
xx
(ω)P
yy
(ω)
(3)
In practice estimate of magnitude-squared coher-
ence (MSC) is used
C
xy
(k) =
|P
xy
(k)|
2
P
xx
(k)P
yy
(k)
, 0 ≤ C
xy
(k) ≤ 1 (4)
where P
xx
and P
yy
are power spectral density of x
and y and P
xy
is the cross power spectral density of
x and y. It is assumed that signals from two micro-
phones consists of speech signal and additive noise:
x(k) = s
x
(k) + n
x
(k),
y(k) = s
y
(k) + n
y
(k),
(5)
were s
x
and s
y
are speech and n
x
and n
y
are noise
components. It was (Martin and Vary, 1994) proved
that in most situations noise components are not cor-
related to each others and speech components are
strongly correlated. So in speech segments magnitude
squared coherence function is almost equal 1 and in
other case its value is near zero. To estimate the mag-
nitude squared coherence function Welch’s averaged
periodogram method was applied in the system. Next
magnitude squared coherence function is integrated,
for discrete signal the following approximation was
applied:
M
γ
=
1
N
k
max
∑
k=k
min
C
xy
(k) (6)
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
434
40 cm
distance
Coherence
estimation
Threshold
computation in
nonspeech activity
Speech/
pause
detection
Correction
algorithm
Speech/
pause
decision
Coherence
integration
Speech/pause
detection based on
fixed treshold
Figure 4: Block diagram of voice activity detector based on coherence estimation.
where k
min
= 9 which means that approximation
is not computed for frequencies below 250 Hz where
noise is usually strongly correlated for assumed dis-
tance of 40 cm between two input microphones (Mar-
tin and Vary, 1994). In this algorithm short inter-
ferences correction mechanism identical to single-
microphone system was implementing.
4 EXPERIMENTS
Algorithms were implemented in Matlab environ-
ment. All experiments were carried out with real
signals recorded in the noisy street, suburbs of the
city (bird chirps and dogs barking) and in classroom.
Stereo recordings were made using a pair of matched
omnidirectional microphones placed in distance of
40 cm. Speech sequences in collected database were
manually marked.
4.1 Results
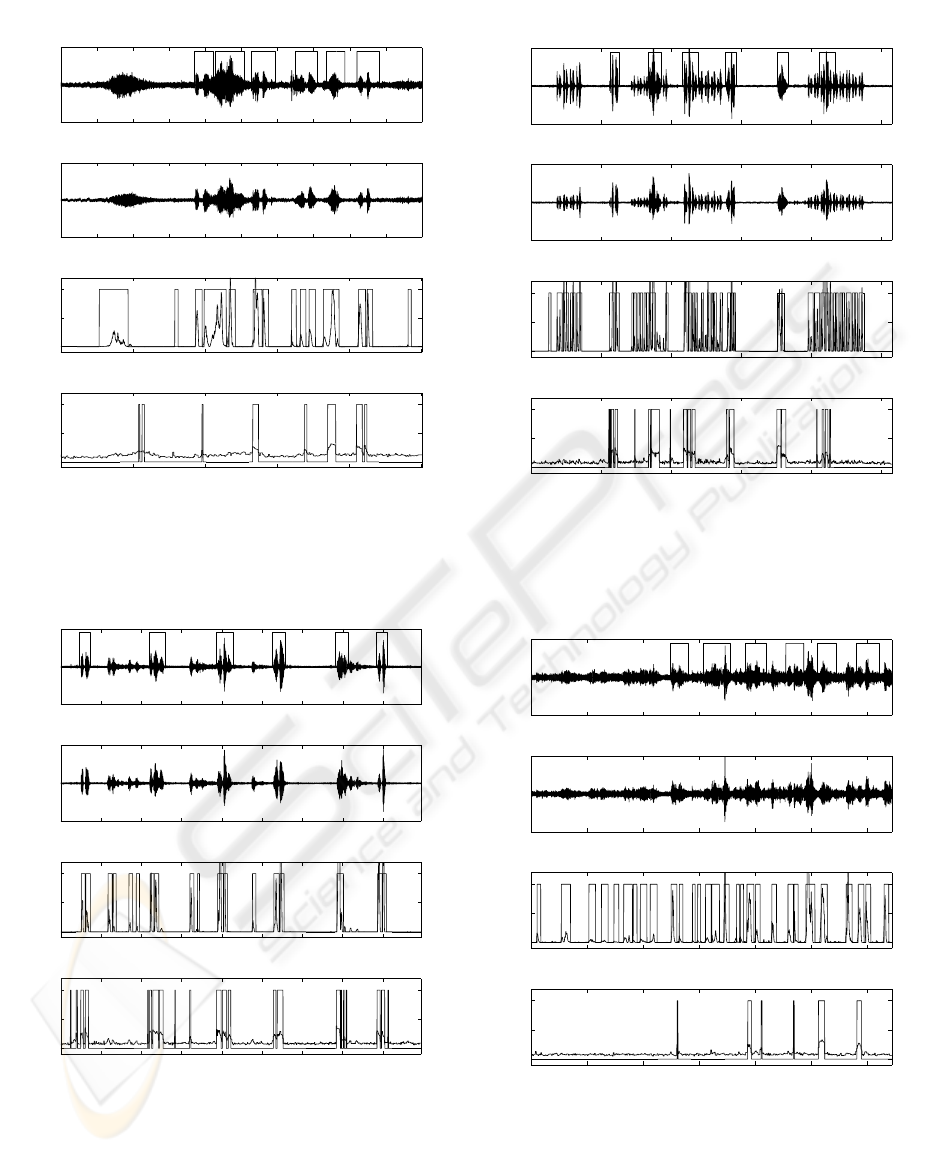
A few different acoustical situations were investi-
gated. In Fig. 5 recording was made in the street,
speech is corrupted by nonstationary noise. A better
performance was obtain for single microphone sys-
tem. In Fig. 6 recording is made three meters from
passing cars. The results for single-microphone sys-
tem is generally better but false detections occurs.
In Fig. 7 recording was made far from noisy street
but dog barking is audible between speech segments
and during speech segments. In such situation single-
microphone system is not able to distinguish speech
from dog barking. Two-microphone system deals
with this problem because barking picked up by mi-
crophones is not correlated.
In Fig. 8 the same situation like in Fig. 7 is shown
for birds chirp. Single-microphone system is not able
by simple filtration of spectral envelopes to separate
such sounds from speech.
In Fig. 9 recording was made in classroom
40 m
2
floor space in situation of cocktail party ef-
fect. Single-microphone system give number of false
speech detection decisions - separation in modulation
domain fails in this case. Coherence based detector is
not able to trace all speech segments because SNR of
the signal is less than 0 in this recording.
Experiments shown that single-microphone sys-
tem was not able to distinguish speech from such
sounds like dog barking or bird chirps in background
and cocktail-party effect. On the other hand single-
microphone system has generally better performance
in presence of broadband noise.
0 2 4 6 8 10
−1
0
1
Left channel with shown speech segments
Amplitude
0 2 4 6 8 10
−1
0
1
Right channel
Amplitude
0 2 4 6 8 10
0
0.5
1
Single−microphone VAD decision and S parameter
0 2 4 6 8 10
0
0.5
1
Two−microphone VAD decision and MSC
Time [s]
Figure 5: Effects of speech detection in case of speech with
nonstationary street noise.
SPEECH SEGMENTATION IN NOISY STREET ENVIRONMENT
435
0 1 2 3 4 5 6 7 8 9
−1
0
1
Left channel with shown speech segments
Amplitude
0 1 2 3 4 5 6 7 8 9
−1
0
1
Right channel
Amplitude
0 2 4 6 8 10
0
0.5
1
Single−microphone VAD decision and S parameter
0 2 4 6 8 10
0
0.5
1
Two−microphone VAD decision and MSC
Time [s]
Figure 6: Effects of speech detection in case of very strong
noise from passing cars.
0 2 4 6 8 10 12 14 16
−1
0
1
Left channel with shown speech segments
Amplitude
0 2 4 6 8 10 12 14 16
−1
0
1
Right channel
Amplitude
0 2 4 6 8 10 12 14 16
0
0.5
1
Single−microphone VAD decision and S parameter
0 2 4 6 8 10 12 14 16
0
0.5
1
Two−microphone VAD decision and MSC
Time [s]
Figure 7: Effects of speech detection in case of speech
mixed with dog barking in background.
5 CONCLUSION
Two voice activity detectors for speaker verification
system were described and compared in this paper.
0 5 10 15 20 25
−1
0
1
Left channel with shown speech segments
Amplitude
0 5 10 15 20 25
−1
0
1
Right channel
Amplitude
0 5 10 15 20 25
0
0.5
1
Single−microphone VAD decision and S parameter
0 5 10 15 20 25
0
0.5
1
Two−microphone VAD decision and MSC
Time [s]
Figure 8: Effects of speech detection in case of speech
mixed with bird chirps in background.
0 2 4 6 8 10 12
−1
0
1
Left channel with shown speech segments
Amplitude
0 2 4 6 8 10 12
−1
0
1
Right channel
Amplitude
0 2 4 6 8 10 12
0
0.5
1
Single−microphone VAD decision and S parameter
0 2 4 6 8 10 12
0
0.5
1
Two−microphone VAD decision and MSC
Time [s]
Figure 9: Effects of speech detection in case of cocktail
party effect in classroom.
The first one is single-microphone system based on
properties of human speech modulation spectrum.
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
436

The second one is two-microphone system based on
coherence function. Experiments shown better per-
formance of single-microphone system in case of un-
voiced background sounds like passing cars. In case
of voiced sounds in background simple filtration of
modulation components was insufficient to discrimi-
nate speech from voiced sounds and coherence based
system gives much less false speech detection deci-
sions. Future work will be concentrated on applica-
tion of coherence function into modulation domain.
ACKNOWLEDGEMENTS
The work presented was developed within VIS-
NET 2, a European Network of Excellence
(http://www.visnet-noe.org), funded under the
European Commission IST FP6 Programme.
REFERENCES
Atlas, L. and Shamma, S. (2003). The modulation transfer
function in room acoustics as a predictor of speech
intelligibility. EURASIP Journal on Applied Signal
Processing, 7:668–675.
Baszun, J. (2007). Voice activity detection for speaker ver-
ification systems. In Joint Rougth Set Symposium,
Toronto, Canada.
Baszun, J. and Petrovsky, A. (2000). Flexible cochlear
system based on digital model of cochlea: Structure,
algorithms and testing. In Proceedings of the 10th
European Signal Processing Conference ( EUSIPCO
2000), pages 1863–1866, Tampere, Finland. vol. III.
Carter, G. C. (1987). Coherence and time delay estimation.
Proceedings of the IEEE, 75(2):236–254.
Doblinger, G. (1995). Computationally efficient speech en-
hancement by spectral minima tracking in subbands.
In Proceedings of the 4th European Conference on
Speech Communication and Technology, pages 1613–
1516, Madrit, Spain.
Drullman, R., Festen, J., and Plomp, R. (1994). Effect of
temporal envelope smearing on speech reception. J.
Acoust. Soc. Am., (2):1053–1064.
El-Maleh, K. and Kabal, P. (1997). Comparison of voice ac-
tivity detection algorithms for wireless personal com-
munications systems. In Proceedings IEEE Cana-
dian Conference Electrical and Computer Engineer-
ing, pages 470–473.
Elhilali, M., Chi, T., and Shamma, S. (2003). A spectro-
temporal modulation index (stmi) for assessment
of speech intelligibility. Speech Communication,
41:331–348.
Guerin, A. (2000). A two-sensor voice activity detection
and speech enhancement based on coherence with ad-
ditional enhancement of low frequencies using pitch
information. In EUSIPCO 2000, pages 178–182,
Tampere, Finland.
Hermansky, H. and Morgan, N. (1994). RASTA processing
of speech. IEEE Transactions on Speech and Audio
Processing, 2(4):587–589.
Houtgast, T. and Steeneken, H. J. M. (1973). The modula-
tion transfer function in room acoustics as a predictor
of speech intelligibility. Acustica, 28:66.
Houtgast, T. and Steeneken, H. J. M. (1985). A review of
the MTF concept in room acoustics and its use for es-
timating speech intelligibility in auditoria. J. Acoust.
Soc. Am., 77(3):1069–1077.
Martin, R. (2001). Noise power spectral density estimation
based on optimal smoothing and minimum statistics.
IEEE Transactions on Speech and Audio Processing,
9:504–512.
Martin, R. and Vary, P. (1994). Combined acoustic echo
cancellation, dereverberation and noise reduction: a
two microphone approach. Ann. Telecommun., 49(7-
8):429–438.
Mesgarani, N., Shamma, S., and Slaney, M. (2004). Speech
discrimination based on multiscale spectro-temporal
modulations. In ICASSP, pages 601–604.
Sovka, P. and Pollak, P. (1995). The study of speech/pause
detectors for speech enhancement methods. In Pro-
ceedings of the 4th European Conference on Speech
Communication and Technology, pages 1575–1578,
Madrid, Spain.
Thompson, J. and Atlas, L. (2003). A non-uniform modu-
lation transform for audio coding with increased time
resolution. In ICASSP, pages 397–400.
SPEECH SEGMENTATION IN NOISY STREET ENVIRONMENT
437
