
FACIAL ANIMATION WITH MOTION CAPTURE BASED ON
SURFACE BLENDING
Lijia Zhu and Won-Sook Lee
School of Information Technology and Engineering, University of Ottawa
800 King Edward Ave., Ottawa, Ontario, Canada, K1N 6N5
Keywords: Surface Blending, Feature Point, Genetic Algorithms, Motion Capture, Facial Animation, Consistent
Parameterization, MPEG-4, Laser Scanner.
Abstract: This paper proposes a methodology to reconstruct 3D facial expressions with motion capture data. Feature-
point based facial animation provides easy control of expression usually by moving surface points using
mathematical deformation. However it does not support the high quality of surface animation of the face
where the feature points are not present. In this paper, we focus on animating a 3D facial model using only
feature points, but keeping the high quality animation by using an expression databank obtained from
surface scanning. Firstly, a facial expression databank is prepared by processing raw laser-scanned human
face data with a consistent parameterization technique. Secondly, sparse motion capture data is obtained
using an optical tracking system. Thirdly, guided by the captured MPEG-4 feature point motions, we find
the corresponding surface information in the existing examples in the databank by linear combination of
them. The optimized blending weights are obtained implicitly by Genetic Algorithms (GA). Finally, the
surface blending result is retargeted into the performer’s neutral facial mesh. Consequently, motions of the
facial surface points are reconstructed.
1 INTRODUCTION
Facial animation can be driven by the facial motion
data captured from a live actor’s performance.
Williams (Williams, 1990) tracks expressions of a
live actor and then he maps 2D tracked data onto a
scanned 3D face model. In his work, motion is
captured using a single video camera and a mirror
which generate multiple views required for vision
reconstruction. Since Williams’ pioneering work,
performance-driven facial animation has been
widely studied. Terzopoulos and Waters
(Terzopoulos, 1993) estimate the dynamic facial
muscle contractions from video sequences of
expressive human faces. They use deformable
contour models to track facial motions in video
images. Then the tracked muscle contractions are
used to animate the physically based model. Guenter
et al. (
Guenter, 1998) capture the geometry and
texture information on a live actor’s face from video
streams and produce life-like facial animation based
on the captured markers. Given video footage of a
person's face, Pighin et al. (Pighin, 1999) present
techniques to automatically recover the face position
and the facial expression from each frame in the
video sequence.
The aforementioned works utilize video
sequences to drive the facial animation. They
reconstruct 3D motion data based on 2D video
images. However, it is difficult to capture detailed
motions of the face from video sequences. Recently,
with more advancing optical motion capture
technology (e.g. VICON
TM
system), higher resolution
and more consistent facial motions can be captured.
Some researchers utilize a VICON
TM
system for
facial animation. For example, Kshirsagar et al.
(Kshirsagar, 2001) use a VICON
TM
system to track
feature point motions of a talking person. Then for
producing realistic speech animation, they use
Principal Component Analysis (PCA) to perform
statistical analysis on the actual speech data.
Normally, the motion capture data consists of
motions for the sparse feature points. While the
feature-point based approach provides easier control
for facial animation, it brings the issue of how to
generate natural-looking results with merely
controlling a few key points on the face.
To tackle this issue, it is better to have additional
information on how the facial mesh should move (i.e.
63
Zhu L. and Lee W. (2007).
FACIAL ANIMATION WITH MOTION CAPTURE BASED ON SURFACE BLENDING.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - AS/IE, pages 63-68
DOI: 10.5220/0002083700630068
Copyright
c
SciTePress

how the facial surface points should move).
Mapping the feature point motions into an available
databank would be a suitable solution. When an
expressive databank is available, it would be very
beneficial to make use of that data and surface
blending is probably the most suitable animation
technique for this case. Some works combine
performance-driven approach with the surface
blending technique. Kouadio et al. (Kouadio, 1998)
present an animation system that captures facial
expressions from a performance actor. They animate
the human face based upon a bank of 3D facial
expressions. A linear combination of the key
expressions in the bank is used to produce facial
expressions. In their work, blending weights are
obtained by minimizing Euclidean distance between
corresponding feature points in the face model and
live markers. Chai et al. (Chai, 2003) show that
facial actions can be created from a pre-processed
motion capture database. They develop a facial
tracking system to extract animation control
parameters from video. They reconstruct facial
motions by blending the K closest examples in the
database.
In this paper, we aim to control facial animation
merely with the facial feature point motions. In order
to produce realistic motions for facial surface points,
we make use of a databank. Then guided by the
captured feature point motions, we produce the
surface blending result based on the examples in the
databank. Here we propose an approach to obtain
blending weights implicitly by Genetic Algorithms
(GA). Then we retarget the surface blending result
onto the neutral model of the performer.
The rest of the paper is organized as follows.
Section 2 prepares a facial expression databank. A
consistent parameterization technique for processing
laser scanned data is also shown in Section 2.
Section 3 uses a VICON
TM
system to capture the
facial motions performed by the human subject.
Section 4 shows a feature-point guided surface
blending technique via GA. Section 5 utilizes a
facial motion retargeting technique. More
experimental results are shown in Section 6. Finally
we conclude our paper with Section 7.
2 PREPARE A FACIAL
EXPRESSION DATABANK
USING A LASER SCANNER
With advanced laser scanning technology, a laser
scanner is able to capture the subject’s face in very
high resolution. In this section, we utilize a
Cyberware
TM
3030 laser scanner to construct a facial
expression databank. We scan a person when he
performs various expressions and visemes statically.
Totally, eleven expressions and fourteen visemes of
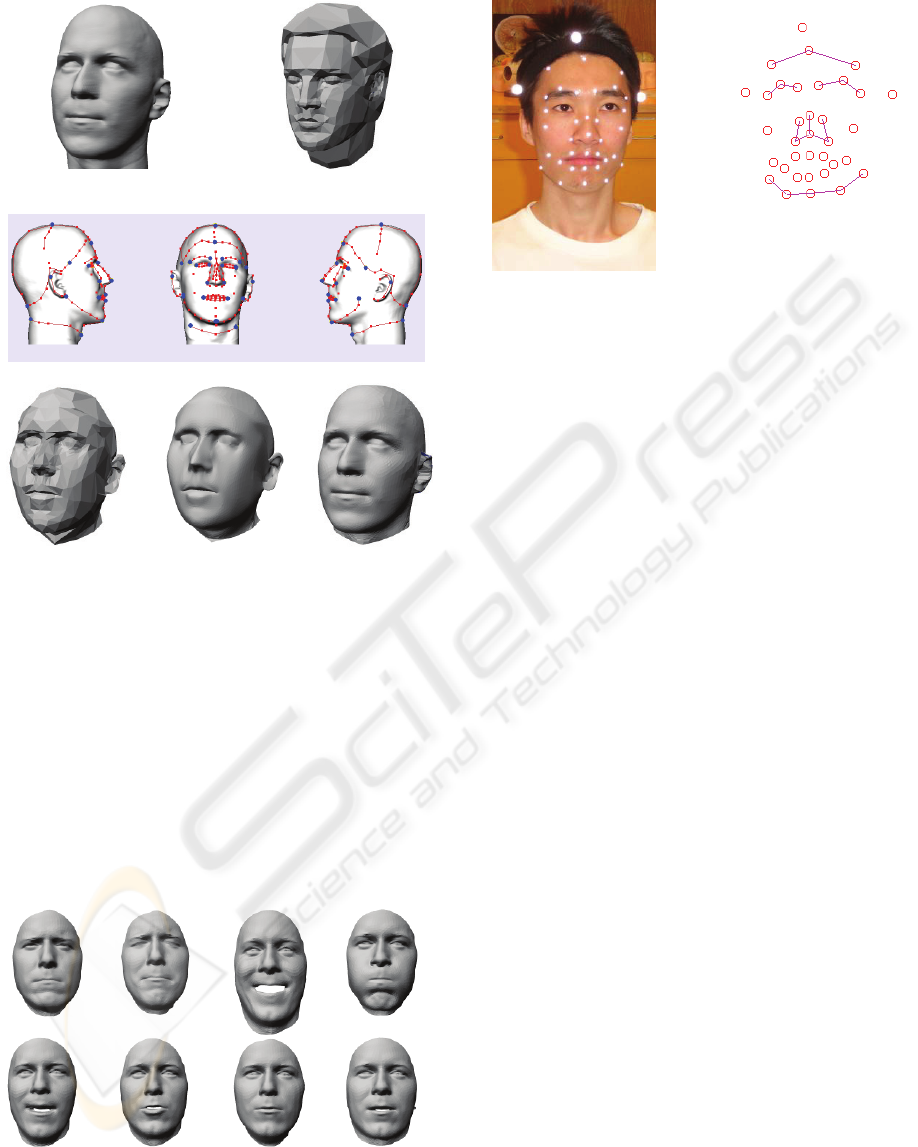
this person are scanned. Examples of scanned data
are depicted in
Figure 1. The first row is the example
expressions and the second row is the example
visemes.
Figure 1: Raw laser scanned data.
However, the raw scan data is so dense, irregular
and inconsistent that it can not be directly used for
optimal model construction and animation. A
common approach to tackle this is to pre-define a
generic model with all the necessary structures. Then
this generic model is adapted to the raw laser-
scanned data. Many works have been done on
adapting a generic model to raw laser-scanned data.
(e.g. (Zhang, 2004), (Jeong, 2002), and (Kähler,
2002)). Here we adopt the similar idea to
parameterize the raw-laser scanned data consistently.
Firstly we prepare a generic model
(Figure 2(b))
with predefined feature points. Then we detect the
same feature points in the raw laser-scanned data in
the semi-automatic way
(Figure 2(c)). After that, we
deform the generic model using a Radial Basis
Function (RBF) deformation technique
(Figure 2(d)).
We then increase the triangle count by applying
Loop’s subdivision scheme twice
(Figure 2(e)).
Finally we apply a cylindrical projection technique
to further adapt the subdivision result
(Figure 2(e)) to
the raw laser scanned data
(Figure 2(a)). The details
of the aformentioned techniuqes can be found in our
previous works ((Zhu, May 2006) and (Lee, 2006)).
As we can see, the resulting model shown as Figure
2(f) bears very close resemblance to the raw laser-
scanned data.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
64
(a)
(b)
(c)
(d)
(e)
(f)
Figure 2: Consistent parameterization technique for
processing the raw laser-scanned data (a) Original laser-
scanned data (699,392 triangles); (b) Generic model (1,485
triangles); (c) Feature point detection for raw laser-
scanned data; (d) Deformed generic model (1,485
triangles); (e) After applying Loop’s subdivision twice
(23,760 triangles); (f) After cylindrical projection (23,760
triangles).
Using this consistent parameterization technique,
we can process all the laser scanned data in the
consistent way. Figure 3 shows examples of the
resulting consistent meshes. The first row is the
example expressions and the second row is the
example visemes.
Figure 3: Example consistent meshes of various
expressions and visemes.
Figure 4: Facial motion capture using a VICON
TM
system.
(a) Sparse markers are attached to the subject’s face; (b)
3D virtual markers reconstructed by the VICON
TM
system.
3 FACIAL MOTION CAPTURE
We utilize an optical tracking system (VICON
TM
) to
capture facial motions performed by a human subject.
As shown in
Figure 4(a), a set of reflective markers is
attached to the human subject’s face. A set of 32
markers is used here which is the subset of the
feature point set specified in the MPEG-4 standard.
Not all MPEG-4 feature points defined in the
standard are put reflective markers here since it is
difficult to track the markers when they are too close
to each other. We do not place markers on the
eyelids since those markers may interfere with the
subject when performing facial motions. Also we do
not put markers in the inner lip region since the
subject has trouble in performing the mouth actions.
Note that three additional markers on the head
mounted jig are used in our motion capture session
(
Figure 4(a)). Although they do not contribute to
facial motions, they are important for removing
global movements when analyzing facial motions.
With reflective markers on the subject’s face, the
VICON
TM
system is able to track those markers when
the subject performs facial motions. A VICON
TM
software suite is then used to process the 2D data
captured from eight high-resolution cameras. The
VICON
TM
software suite is able to clean and
reconstruct the 3D trajectory data from those 2D
motion data.
Figure 4 (b) shows the reconstructed 3D
marker data of a frame.
The reconstructed 3D data needs to be
normalized among frames. The following presented
normalization technique is similar to the one
proposed by Busso et al. (Busso, 2004). In the
normalization step, the first neutral frame is used as
(a)
(b)
FACIAL ANIMATION WITH MOTION CAPTURE BASED ON SURFACE BLENDING
65
the reference frame. Firstly, the three head jig points
are used for removing global head motions. In each
frame, these three rigid points define a local
coordinate system. Each frame is then rotated to
align it with the reference frame. Then we use the
nose tip point as the reference point to calculate the
translation vector so that the nose tip in each frame
aligns with that in the neutral frame. After the
normalization step, the facial motion for each marker
is calculated using the neutral frame as a reference.
Once facial motions for the sparse markers are
known, next question confronting us is how to
reconstruct motions for facial surface points of the
subject.
4 FEATURE POINT GUIDED
SURFACE BLENDING VIA
GENETIC ALGORITHMS
Given sparse marker motions, the goal of this section
is to reconstruct motions for facial surface points of
the subject. Mapping sparse marker motions into an
available databank is a suitable solution. In Section
2, a facial expression databank is constructed. We
make use of that databank here. Guided by captured
feature point motions, motions for facial surface
points are obtained by blending the examples in the
databank using the surface blending technique.
4.1 Convert the Motion Capture Data
into the Space of the Databank
Firstly, the sparse motion capture data has to be
converted into the space of the databank. Chai et al.
(Chai, 2003) scale the extracted animation
parameters to ensure that motions from the tracked
data have approximately the same magnitude as
those in the database. They compute this scale by the
ratio of the mouth width between the tracked data
and the model in the database.
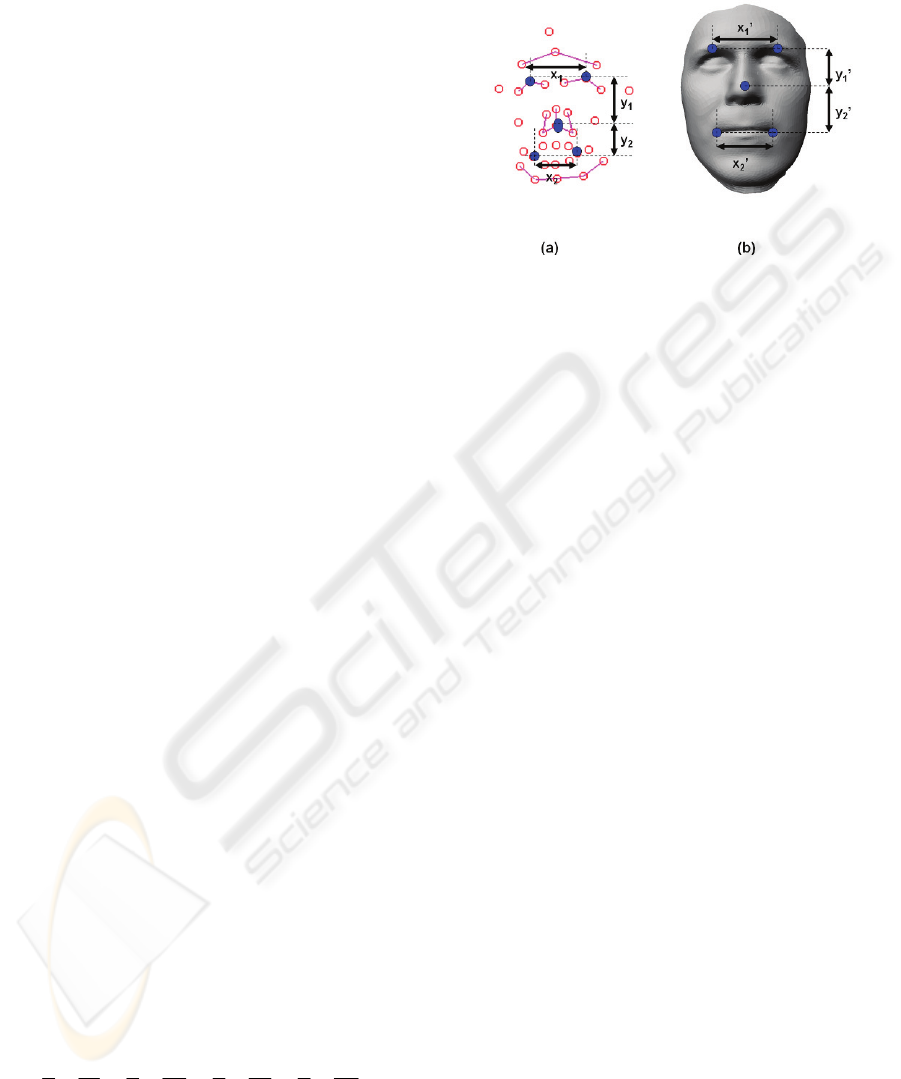
The following explains how we decide the scale
factor. We calculate the major feature point distances
in both neutral motion capture data (
Figure 5(a)) and
the neutral model of the databank (
Figure 5 (b)). Then
these distances are used to decide the final scale
factor. The final scale factor S is given by:
'4
1
'4
1
'4
1
'4
1
2
2
1
1
2
2
1
1
y
y
y
y
x
x
x
x
S ×+×+×+×=
(1)
The four distance scales contribute equally in
deciding the final scale factor S. The averaging
function decreases the amount of uncertainty. This
scale factor S is then applied on the sparse marker
motions. After that, the captured facial motions are
in the same space as that of the databank.
Figure 5: Illustration of calculating the scale factor to
convert motion capture data into the space of the databank.
(a) Neutral motion capture data; (b) Neutral model in the
databank.
4.2 Our Genetic Algorithm Approach
for Finding Blending Weights
Given the scaled sparse facial motions as input (i.e.
specified feature point motions), we blend the
examples in the databank. In this section, we find the
blending weights implicitly via Genetic Algorithms
(GA). More details of the following GA technique
can be found in our previous work (Zhu, July 2006).
Our GA population is initialized with the
previously constructed databank. In each generation,
three example faces from the population pool are
selected randomly. Then we use a fitness function to
evaluate randomly selected three examples
according to the input (i.e. captured feature point
motions). The example with the worst fitness value
in this tournament is not allowed to survive in the
next generation. It is removed from the population
and replaced with the offspring of two winners. For
producing the offspring, we adopt a crossover
operator to mix the two winners. After that, the
offspring is used to replace the worst example in the
previous tournament. The original population now
comes to the next generation. We iterate such
process again and again until N generations are
processed. It is our GA termination condition. N =70
is chosen here experimentally.
We keep track of the best individual over all
generations in the whole GA process. When GA
process meets the termination condition, the best
individual face so far is returned as the final surface
blending result. From Figure 6, we can see the final
surface blending result.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
66
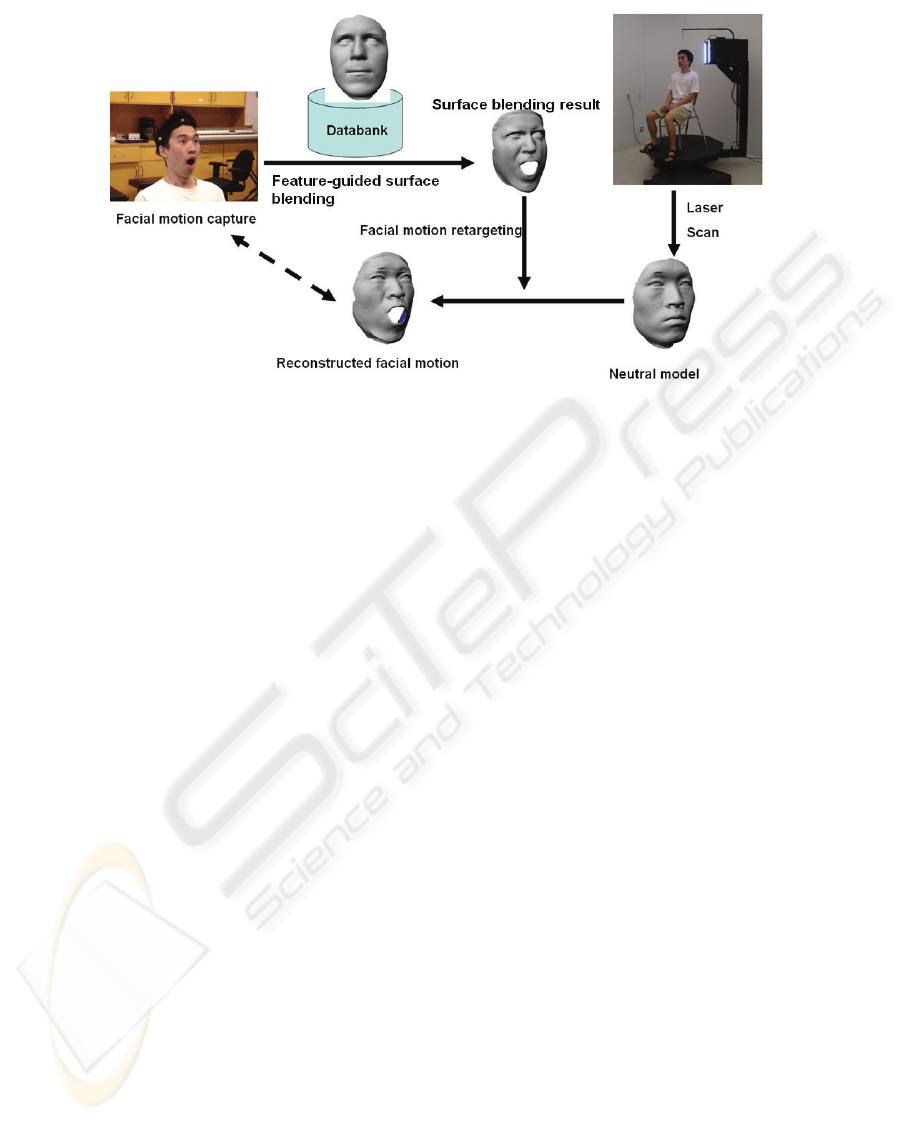
Figure 6: Illustration on how to reconstruct facial motion from sparse motion capture data.
5 FACIAL MOTION
RETARGETING
Since the person in the databank is different from the
performer in the motion capture session, we need to
retarget facial motions to the performer’s neutral
face. Here we adopt the idea proposed by Noh and
Neumann (Noh, 2001) where an expression cloning
technique is used to clone motion vectors of the
source face model onto the target model.
Before retargeting, we have to get the neutral
shape of that performer’s face. We utilize the
Cyberware
TM
3030 laser-scanner to get the neutral
shape for the performer (
Figure 6). The raw laser-
scanned data is processed using the consistent
parameterization technique presented in Section 2.
The resulting performer’s neutral face model shares
the same structure as the models in our databank.
Different from the approach presented in (Noh, 2001)
where the source and the target model have different
structures, here is the trivial case where the source
and the target share the same structure.
Figure 6 shows that the surface blending result is
transferred to the neutral model of the performer
using this facial motion retargeting technique. As
shown in
Figure 6, the final reconstructed facial
motion is quite similar to the one in the real world.
6 RESULTS
In this section, more experimental results are shown.
As described in Section 3, a VICON
TM
motion
capture system is used to capture sparse facial
motions. Facial motions are captured when the
subject is performing facial expressions and
speaking. At the same time, a digital video camera is
used to record facial motions of the subject.
Figure 7 shows reconstructed facial motions
using the aformentioned methodology. The first,
third and fifth rows are the snapshots recorded with
a digital video camera. The rest rows show the
corresponding reconstructed facial motions.
7 CONCLUSIONS
Our experimental results demonstrate that this
methodology is effective for reconstructing realistic
facial motions. By using a facial expression
databank, we can achieve high quality facial
animation using only feature points. The detailed
methodology is: firstly, we utilize the consistent
parameterization technique to process the raw laser-
scanned data. Thus a facial expression databank can
be constructed. Secondly, we capture sparse facial
motions using an optical tracking system. Thirdly,
guided by the captured feature point motions, we use
a GA approach for surface blending the examples in
the databank. Finally, the surface blending result is
retargeted into the performer’s neutral facial mesh.
FACIAL ANIMATION WITH MOTION CAPTURE BASED ON SURFACE BLENDING
67

However, our results depend on the similarity
between the database of laser captured faces and the
subject. Therefore individualized facial motion
retargeting is our on-going research topic.
Figure 7: Results of reconstructed facial motions.
ACKNOWLEDGEMENTS
We would like to thank Ramesh Balasubramaniam
in the Sensorimotor Neuroscience Laboratory of the
University of Ottawa for allowing us to use his
VICON
TM
system. We are also grateful to Francois
Malric and Andrew Soon for using their face data.
REFERENCES
Busso, C., Deng, Z., Lopes, Yildirim, S., Bulut, M., Lee,
C.M., Kazemzadeh, A., Lee, S., Neumann, U.,
Narayanan, S., 2004. Analysis of emotion recognition
using facial expressions, speech and multimodal
information. In Proc. of ACM 6th International
Conference on Multimodal Interfaces (ICMI 2004).
p.205-211. State College, PA.
Chai, J., Xiao, J., Hodgins, J., 2003. Vision-based control
of 3D facial animation. In Proc. of the 2003 ACM
SIGGRAPH/Eurographics Symposium on Computer
animation. San Diego, California.
Guenter, B., Grimm, C., Wood, D., Malvar, H., Pighin, F.,
1998. Making faces. In Proc. SIGGRAPH 1998. p.
55—66.
Jeong, W.K., Kähler, K., Haber, J., Seidel, H.P., 2002.
Automatic generation of subdivision surface head
models from point cloud data. In Proc. Graphics
Interface. p. 181-188.
Kähler, K., Haber, J., Yamauchi, H., Seidel, H.P., 2002.
Head shop: generating animated head models with
anatomical structure. In Proc of the 2002 ACM
SIGGRAPH/Eurographics symposium on Computer
animation, San Antonio, Texas. p. 55 – 63.
Kouadio, C., Poulin, P., Lachapelle, P., 1998. Real-time
facial animation based upon a bank of 3D facial
expressions. In Proc. of the Computer Animation.
Kshirsagar, S., Molet, T., Magnenat-Thalmann, N.,
2001. Principal components of expressive speech
animation. In Proc. of Computer Graphics
International 2001. p. 38-44.
Lee, W.-S., Soon, A., 2006. Facial shape and 3D skin.
Computer Animation and Virtual Worlds (SCI), Vol.
17, Issue 3-4 (p. 501-512). July 2006, John Wiley.
Pighin, F., Szeliski, R., Salesin, D.H., 1999.
Resynthesizing facial animation through 3D model-
based tracking. In Proc. of International Conference
on Computer Vision. p.143--150. Corfu, Greece.
Terzopoulos, D., Waters, K., 1993. Analysis and
synthesis of facial image sequences using physical and
anatomical models. IEEE Trans. Pattern Analysis and
Machine Intelligence. 15(6):569—579.
Noh, J.Y., Neumann, U., 2001. Expression cloning. In
Proc. of SIGGRAPH 2001. ACM Press. p. 277-288.
Williams, L., 1990. Performance-driven facial animation.
In Proc. of SIGGRAPH 1990. p. 235--242.
Zhang, Y., Sim, T., Tan, C. L., 2004. Adaptation-based
individualized face modeling for animation using
displacement map. In Proc. of Computer Graphics
International 2004 (Crete, Greece). p. 518-521.
Zhu, L., Lee, W.-S., May 2006. Modeling and animating
for the dense laser-scanned face in the low resolution
level. In Proc. of the 17th IASTED International
Conference on Modelling & Simulation 2006.
Montreal, Quebec, Canada.
Zhu, L., Lee, W.-S., July 2006. Facial expression via
genetic algorithms, In Proc .of the 19th Annual
Conference on Computer Animation and Social Agents
(CASA) 2006. Geneva, Switzerland.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
68
