
3D VOLUME WATERMARKING USING 3D KRAWTCHOUK
MOMENTS
Athanasios Mademlis
Information Processing Laboratory, Aristotle University of Thessaloniki, 54006, Thessaloniki, Greeece
Petros Daras, Dimitrios Tzovaras
Informatics and Telematics Institute, Centre For Research and Technology Hellas, 57001, PO Box 60361, Thessaloniki, Greece
Michael G. Strintzis
Information Processing Laboratory, Aristotle University of Thessaloniki, 54006, Thessaloniki, Greeece and
Informatics and Telematics Institute, Centre For Research and Technology Hellas, 57001, PO Box 60361, Thessaloniki, Greece
Keywords:
Watermarking, Data Hiding, 3D volume, 3D Krawtchouk moments.
Abstract:
In this paper a novel blind watermarking method of 3D volumes based on the Weighted 3D Krawtchouk
Moments is proposed. The watermark is created by a pseudo-random number generator and is embedded on
low order Weighted 3D Krawtchouk Moments. The watermark detection is blind, requiring only the user’s
key. The watermark bit sequence is created using the key and its cross correlation with the Weighted 3D
Krawtchouk Moments of the possible watermarked volume. The proposed method is imperceivable to the
user, robust to geometric transformations (translation, rotation) and to cropping attacks.
1 INTRODUCTION
In the recent past, with the rapid development of 3D
computing application, huge amount of multimedia
data have become publicly available (photographs,
videos, paintings, music etc). Moreover, the rapid
growth of Internet has increased the number of chan-
nels for digital data distribution. In this environment,
the need for protection of copyrighted digital data is
obvious. The most classic method to achieve the lat-
ter is the watermarking. Extra information (the water-
mark), is hidden with an appropriate algorithm in the
digital data in a way that is imperceptible from the
user, but it can be perceived by an appropriate detec-
tion algorithm.
A watermarking algorithm has to fulfil the follow-
ing criteria:
• Robustness against attacks: The watermark has to
be detectable if the digital data are intentionally or
unintentionally modified.
• Invisibility: The user must not be able to perceive
that the digital data are watermarked.
Concerning color and grayscale 3D volumes, only
few methods have been presented so far. The major-
ity of the methods hide the watermark in appropri-
ate coefficients of an invertible transformation (e.g.
DCT (Wu et al., 2001), Fourier (Solachidis and Pitas,
2005), wavelet (Wu et al., 2001)). The watermark
affects the appropriate parameters in order to ensure
both imperceptibility and robustness against various
attacks. For example, in the secure Fourier-based
watermarking technique presented in (Solachidis and
Pitas, 2005), the watermark is embedded in the mid-
dle frequency coefficients, because the low frequency
coefficients can alter the initial volume in a way that is
visible to the user and the high frequency coefficients
can be easily filtered. There are also other approaches,
(e.g. (Tefas et al., 2002), (Louizis et al., 2002)) in
which the 3D volume is modified in the spatial do-
main, using appropriate embedding functions.
In this paper, a novel blind 3D volume watermark-
ing technique which utilizes the 3D Krawtchouk mo-
ments presented in (Mademlis et al., 2006) is pro-
posed, in order to watermark 3D volumes. The
projection of any 3D volume to the space of
Weighted 3D Krawtchouk moments, which is fully
reversible. Moreover, the Weighted 3D Krawtchouk
Moments are defined in the discrete field, thus no
discretization error is inserted during the Weighted
3D Krawtchouk moments analysis. Also, the pro-
posed 3D Krawtchouk watermarking method is robust
280
Mademlis A., Daras P., Tzovaras D. and G. Strintzis M. (2007).
3D VOLUME WATERMARKING USING 3D KRAWTCHOUK MOMENTS.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IFP/IA, pages 280-283
Copyright
c
SciTePress
against the geometric transformations of rotation and
translation and against cropping attacks.
The rest of the paper is organized as follows.
In Section 2 a brief overview of the Weighted 3D
Krawtchouk Moments is given. The watermark em-
bedding approach is presented in Section 3, while the
watermark detection algorithm is analyzed in Section
4. In Section 5 the experimental results are presented
and finally the conclusions are drawn in Section 6.
2 3D KRAWTCHOUK MOMENTS
3D Krawtchouk Moments have been introduced in
(Mademlis et al., 2006) and exploited for 3D object
search and retrieval applications. In this paper, this
theory is utilized for watermarking purposes. For the
shake of completeness, the theory of 3D Krawtchouk
Moments is briefly described in the sequel.
The n-order Krawtchouk classical polynomials
(Koekoek and Swarttouw, 1998) are defined in terms
of the hyper-geometric function as:
K
n
(x; p,N) =
N
∑
k=0
a
k,n,p
x
k
=
2
F
1
(−n,−x;−N;
1
p
) (1)
where x,n = 0,1,2...N,N > 0, p ∈ (0,1) and the
function
2
F
1
is the hypergeometric function.
The set of Krawtchouk polynomials S = {
K
n
(x; p,N),n = 0...N } has N +1 elements and forms
a complete set of discrete basis functions with weight
function:
w(x; p,N) =
N
x
p
x
(1− p)
N−x
(2)
Krawtchouk Polynomials are orthogonal:
N
∑
x=0
w(x; p,N)K
n
(x; p,N)K
m
(x; p,N) = (3)
= ρ(n; p,N)δ
nm
(4)
where n,m = 1, 2,3...N,
ρ(n; p, N) = (−1)
n
1− p
p
n
n!
(−N)
n
(5)
and δ
nm
is the Kronecker delta function.
Let f(x,y,z) be a 3D function defined in a dis-
crete field A = {(x,y,z) : x,y, z ∈ IN , x = [0. ..N − 1],
y = [0... M − 1], z = [0... L− 1]}. The Weighted 3D
Krawtchouk moments of order (n+m+l) of f, are de-
fined as (Mademlis et al., 2006):
¯
Q
nml
=
N−1
∑
x=0
M−1
∑
y=0
L−1
∑
z=0
¯
K
n
(x; p
x
,N − 1) ×
×
¯
K
m
(y; p
y
,M − 1)
¯
K
l
(z; p
z
,L− 1) ×
× f(x,y, z) (6)
where
¯
K
n
(x; p,N) is the family of weighted
Krawtchouk polynomials defined as:
¯
K
n
(x; p
x
,N − 1) = K
n
(x; p,N)
s
w(x; p,N)
ρ(n; p, N)
(7)
Due to the orthonormality property of the
Weighted 3D Krawtchouk Moments:
f(x,y, z) =
N−1
∑
x=0
M−1
∑
y=0
L−1
∑
z=0
¯
K
n
(x; p
x
,N − 1) ×
×
¯
K
m
(y; p
y
,M − 1)
¯
K
l
(z; p
z
,L− 1) ×
×
¯
Q
nml
(8)
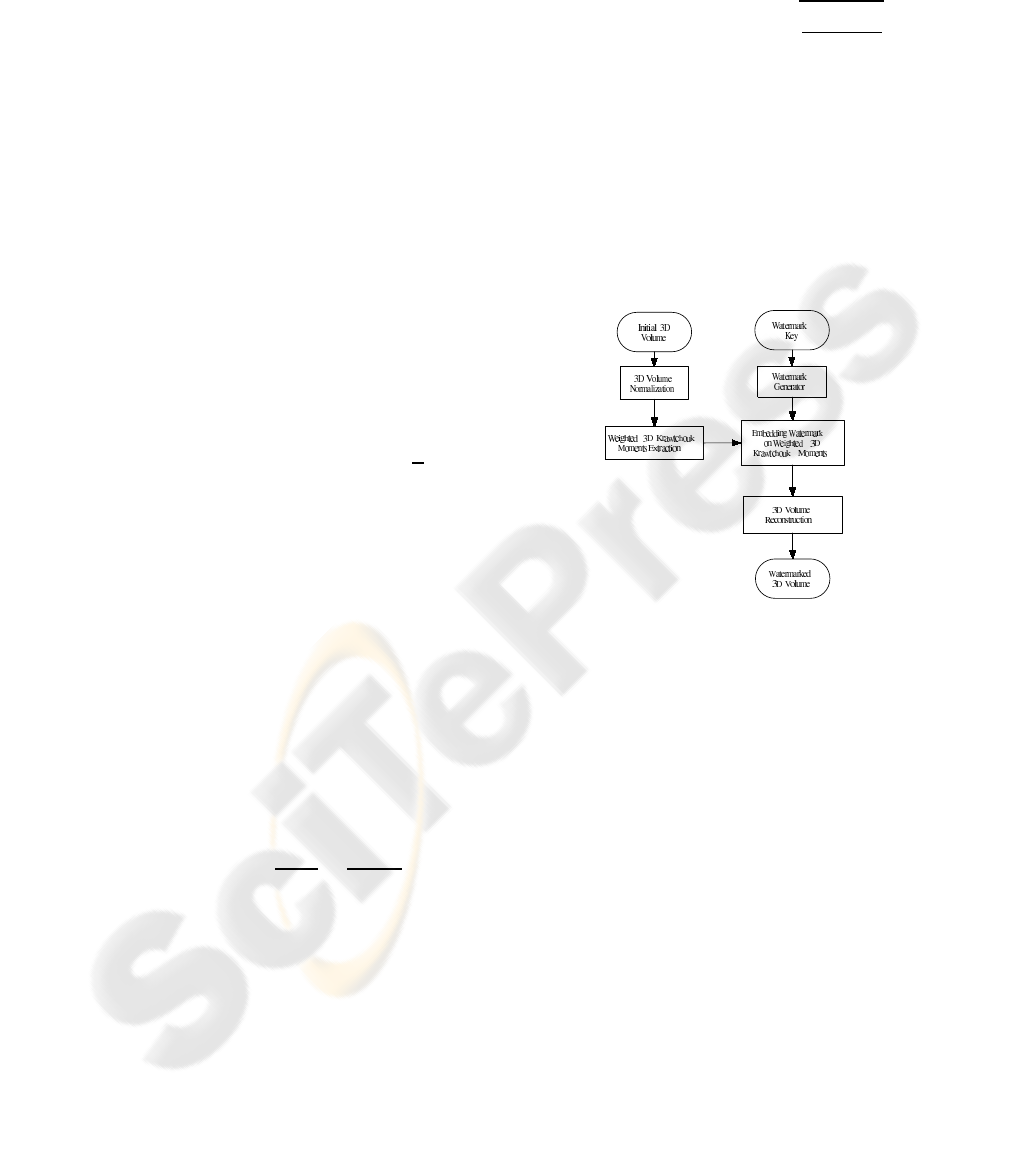
Figure 1: The watermark embedding procedure.
3 WATERMARK EMBEDDING
The watermark generation procedure aims at gener-
ating a two-valued watermark series w
nml
∈ {−1,1},
n = 0. ..N
1
− 1, m = 0.. .M
1
− 1, l = 0.. . L
1
− 1,
where N
1
∗ M
1
∗ L
1
is the watermark length, and N
1
≤
N, M
1
≤ M, L
1
≤ L. The watermark bits are produced
by a method that relies on a seed, which completely
defines it. In this paper a pseudo-random number gen-
erator is utilized. Alternatively, a chaotic sequence
could be used.
Let O be the initial 3D volume, represented by
the volumetric function f
O
(x,y, z). Firstly, O is nor-
malized for rotation and translation and the computed
normalization parameters are stored for the recon-
struction process. For translation normalization, the
3D volume is translated so as the mass center of the
object is placed on [N/2,M/2,L/2]. For achieving
rotation normalization, the classical Principal Com-
ponent Analysis (PCA) is followed. Finally, the
Weighted 3D Krawtchouk moments are extracted ac-
cording to (6).
The watermark is embedded in the low order
Weighted 3D Krawtchouk moments as follows:
¯
Q
′
nml
= (1 + αw
nml
) ∗
¯
Q
nml
(9)
where α is the embedding strength of the water-
mark,
¯
Q
nml
are the Weighted 3D Krawtchouk Mo-
ments of the initial object and
¯
Q
′
nml
are the Weighted
3D Krawtchouk Moments of the watermarked object.
Finally, the watermarked object is reconstructed
from the Weighted 3D Krawtchouk Moments accord-
ing to (8) and it is translated and oriented to initial po-
sition, according to the computed normalization para-
meters.
The embedding process is depicted in Figure 1.
3D Volume
Normalization
3D Volume
Weighted 3D Krawtchouk
Moments Extraction
Watermark
Key
Watermark
Generator
Cross Correlation
Decison
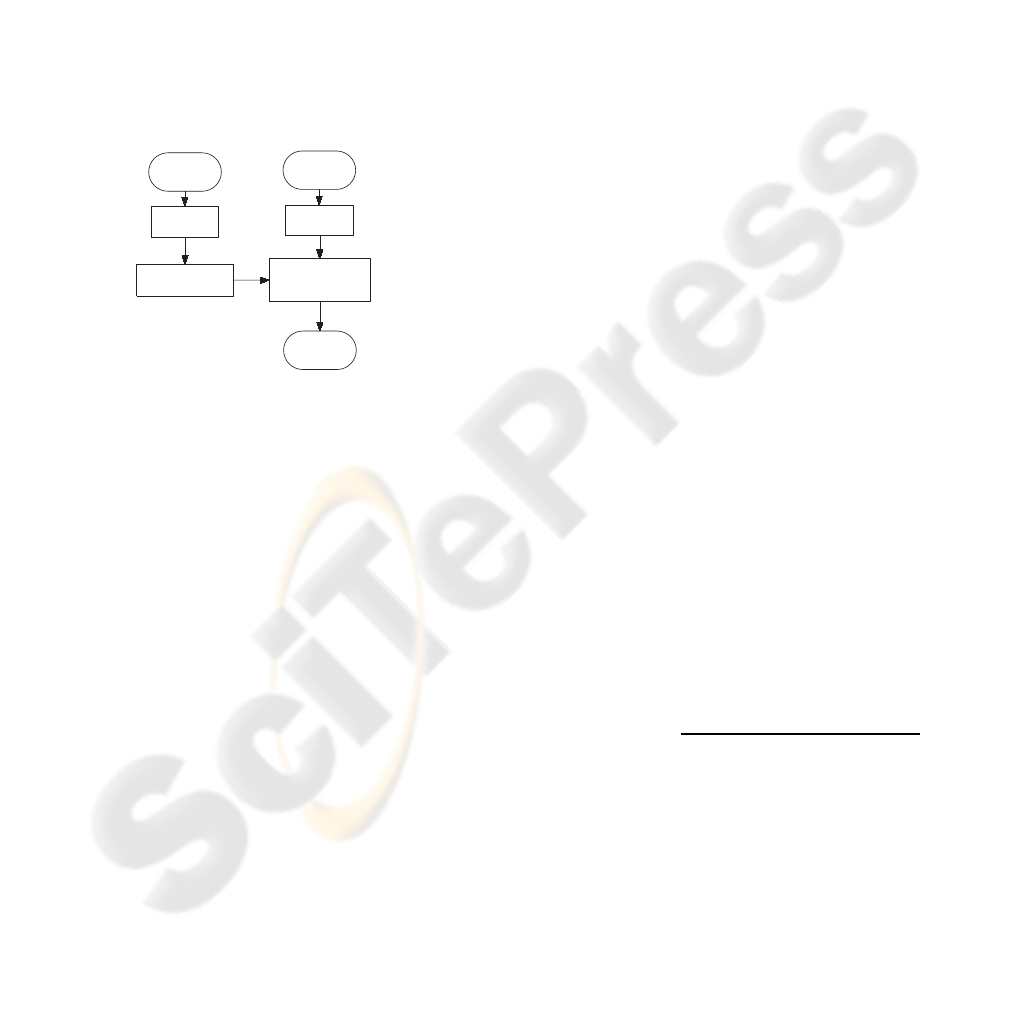
Figure 2: The watermark detection procedure.
4 WATERMARK DETECTION
Let O
′
be a possibly watermarked 3D volume and
f
O
′
(x,y, z) its volumetric function. The volume is nor-
malized with respect to rotation and translation and
the appropriate Weighted 3D Krawtchouk Moments
¯
Q
′
nml
are computed, according to (6).
The watermark detection is blind, thus only the
key of the owner is needed, which is used for the wa-
termark generation W = [w
nml
].
In order to detect if a volume is watermarked with
the watermark W, the correlation γ between the possi-
bly watermarked coefficients
¯
Q
nml
and the watermark
W can be used to detect the presence of the water-
mark, in a similar manner to the blind approach of
(Solachidis and Pitas, 2005):
γ =
∑
nml
¯
Q
′
nml
w
nml
(10)
If the volume is watermarked with the same wa-
termark W:
γ =
∑
mnl
¯
Q
nml
w
nml
+ α
∑
mnl
¯
Q
nml
w
2
nml
(11)
If the volume is watermarked with a different wa-
termark W
′
:
γ =
∑
mnl
¯
Q
nml
w
nml
+ α
∑
mnl
¯
Q
nml
w
nml
w
′
nml
(12)
Then, assuming that the two watermarks W and
W
′
are two uncorrelated random variables which are
also uncorrelated to the Weighted 3D Krawtchouk
Moments of the initial model
¯
Q
nml
, then:
E{ γ} =
0 if O
′
is not watermarked
0 if O
′
is watermarked with W
′
A if O
′
is watermarked with W
(13)
where A = αN
1
M
1
L
1
E{
¯
Q
nml
}.
Thus, using an appropriately selected threshold
T, which can be computed for every object from the
Weighted 3D Krawtchouk coefficient parameters and
the watermark strength, a decision whether the O
′
is
watermarked with W can be made. The watermark
detection algorithm is schematically depicted in Fig-
ure 2.
5 EXPERIMENTAL RESULTS
The proposed algorithm has been tested for its perfor-
mance using MRI 3D volumes with size 64× 64× 64
and 128 × 128 × 32. Each 3D volume was water-
marked with a thousand different watermarks with a
length of 216 bits. The watermark is embedded on
Weighted 3D Krawtchouk Moments with n = [0... 5],
m = [0... 5] and l = [0.. .5], watermark strength α =
0.1, and p
x
= p
y
= p
z
= 0.5.
• Imperceptibility: In order to measure the imper-
ceptibility of the embedded watermark, the Peak
Signal-to-Noise Ratio was calculated. The for-
mula used is:
PSNR = 10log
∑
xyz
255
2
∑
xyz
( f
O
(x,y, z) − f
O
′
(x,y, z))
2
!
(14)
where f
O
(x,y, z) and f
O
′
(x,y, z) are the volumetric
functions of the initial and the watermarked object
respectively.
The PSNR value varies between 42 dB and 47 dB,
thus it is expected that the watermark is impercep-
tible to the user. In Figure 3 a slice from the initial
3D volume and the corresponding slice from the
watermarked 3D volume are depicted. Although
the intensity of the voxels has been changed, it is
not perceptible from the user.

• Geometric attacks: The geometric attacks consid-
ered are the rotation and translation. The nor-
malization step which was initially utilized en-
sures invariance under this kind of attacks and the
percentage of correct watermark detections was
100%.
• Cropping: The low level Krawtchouk moments
capture information mainly for a neighborhood
of the 3D volume located around the point
(p
x
N, p
y
M, p
z
L). The higher the order of the poly-
nomials the greater the area. The watermark has
been embedded in the center of the volume, thus,
any cropping attempt that does not affect the wa-
termarked area, does not affect the watermark de-
tection. If the center area of the 3D volume is
removed, the object is not useful.
Figure 3: Slice of the initial 3D volume (top) and the corre-
sponding watermarked slice (bottom).
The proposed algorithm was also tested for its per-
formance for different lengths of the watermark and
was compared to with a similar watermarking ap-
proach based on the Fourier Transform. The same
watermark is embedded both on the Euclidean norm
of middle frequency Fourier coefficients and the low
order Weighted 3D Krawtchouk moments. Figure 4
depicts the performance of the two methods in terms
of PSNR versus watermark length. The experimen-
tal results prove that the proposed Krawtchouk wa-
termarking scheme can achieve more imperceptible
results than the Fourier Transform for the same wa-
termark bit length.
Figure 4: PSNR values for different watermark length.
6 CONCLUSIONS
In this paper, a novel blind method for 3D volume
watermarking was presented. The 3D volume is nor-
malized in terms of rotation and translation in order
to achieve robustness against these geometric trans-
formations. Then, the Weighted 3D Krawtchouk mo-
ments of the 3D volume are extracted and the water-
mark, which is created by a random number generator
having as seed the user’s private key, is embedded on
low order coefficients which capture local informa-
tion around the 3D volume’s mass center of the vol-
ume. For watermark detection, only the owner’s key
is needed, and a decision is made. The experimen-
tal results proved that the method is imperceptible to
the final user and robust against geometric transfor-
mations and cropping.
ACKNOWLEDGEMENTS
This work was supported by the VICTORY and
CATER EC IST projects and by the PENED Greek
project.
REFERENCES
Koekoek, R. and Swarttouw, R. F. (1998). The askey-
scheme of hypergeometric orthogonal polynomials
and its q-analogue. In Delft, Netherlands:Technische
Universiteit Delft, Faculty of Technical Mathematics
and Informatics Report 98-17.
Louizis, G., Tefas, A., and Pitas, I. (2002). Copyright pro-
tection of 3d images using watermarks of specific spa-
tial structure. In IEEE International Conference on
Multimedia and Expo. ICME ’02, volume 2, pages
557– 560.
Mademlis, A., Axenopoulos, A., Daras, P., Tzovaras, D.,
and Strintzis, M. G. (2006). 3d content-based search
based on 3d krawtchouk moments. In 3D Data
Processing, Visualization & Transmission (3DPVT
2006), Chapel Hil, North Carolina, USA.
Solachidis, V. and Pitas, I. (2005). Watermarking digital
3d volumes in the discrete fourier transform domain.
In IEEE International Conference on Multimedia and
Expo. ICME 2005.
Tefas, A., Louizis, G., and Pitas, I. (2002). 3d image wa-
termarking robust to geometric distortions. In IEEE
International Conference on Acoustics, Speech, and
Signal Processing, (ICASSP ’02)., volume 4, pages
IV–3465– IV–3468.
Wu, Y., Guan, X., Kankanhalli, M., and Huang, Z. (2001).
Robust invisible watermarking of volume data using
the 3d dct. In Computer Graphics International, Hong
Kong, China.
