HUE VARIANCE PREDICTION
An Empirical Estimate of the Variance within the Hue of an Image
Robert N. Grant, Richard D. Green and Adrian J. Clark
Dept. Computer Science, University of Canterbury, Christchurch, New Zealand
Keywords:
Hue noise, image processing, illumination invariance.
Abstract:
In the area of vision-based local environment mapping, inconsistent lighting can interfere with a robust system.
The HLS colour model can be useful when working with varying illumination as it tries to separate illumination
levels from hue. This means that using hue information can result in an image invariant to illumination. This
can be valuable when trying to determine object boundaries, object identification and image correspondence.
The problem is that noise is greater at lower illumination levels. While removing the illumination effects on
the image, separating out hue means that the noise effects of non-optimal illumination remain. This paper
looks at how the known illumination information of pixels can be used to accurately predict and reduce noise
in the hue obtained in video from a colour digital camera.
1 INTRODUCTION
With vision-based local environment mapping consis-
tency in the environment is highly desirable. This
includes consistent lighting conditions which means
that most research is conducted under as controlled
an environment as possible. Unfortunately this is
not a luxury that can be afforded in real world ap-
plications which means that many projects can not
achieve widespread public use. The problem is that
illumination in general usage is unpredictable, caus-
ing tasks such as colour tracking for object recogni-
tion to be problematic because the intrinsic charac-
teristics of digital cameras causes the value of hue to
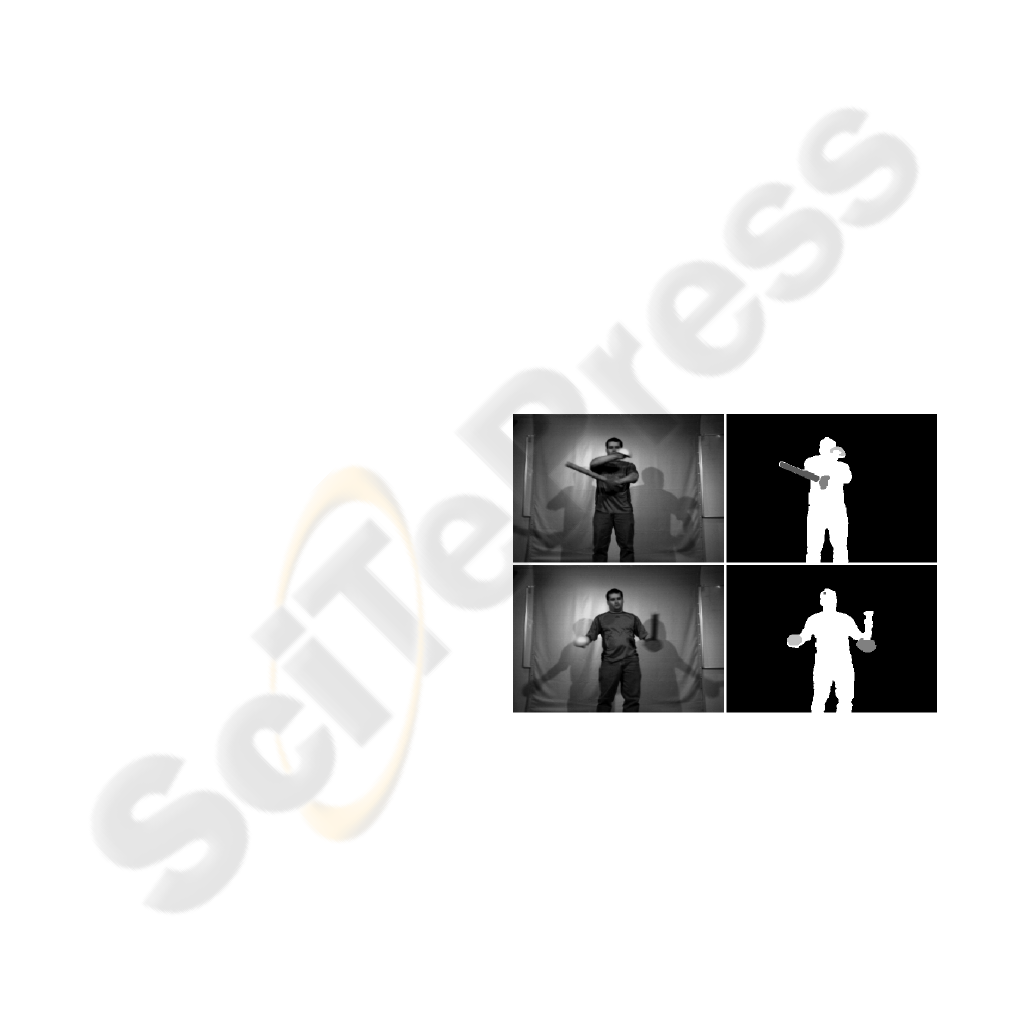
vary with illumination. There have been projects in
the past that have tried to track the colour of an object
as it changes with varying levels of success (Grant
and Green, 2004)(Nummiaro et al., 2002)(Vergs-Llah
et al., 2001) shown in figure 1. While these methods
can work, they often need to be reinitialised if track-
ing is lost and are computationally inefficient leaving
less for the primary vision application.
This research takes the approach of an illumina-
tion invariant filter on video data, acquiring video
frames and converting them into a normalised illu-
mination format consisting of the raw colours of the
Figure 1: Frames from a dynamic colour tracker (Grant and
Green, 2004).
scene. Conversion to the HLS colour model shown in
figure 2 is the starting point to this transformation as
the hue component of this colour model is essentially
the colour of an object with the illumination inten-
sity information stripped out. White balancing is also
necessary to remove light source colouring effects on
objects.
This would be an ideal illumination invariant input
for a computer vision system as with accurate white
5
N. Grant R., D. Green R. and J. Clark A. (2007).
HUE VARIANCE PREDICTION - An Empirical Estimate of the Variance within the Hue of an Image.
In Proceedings of the Second International Conference on Computer Vision Theory and Applications - IFP/IA, pages 5-9
Copyright
c
SciTePress

correct the effects of discoloured lighting in an image
(Lam et al., 2004).
By implementing reliable white balancing and
using an invariant colour model an object’s colour
should rarely change due to illumination changes.
Unfortunately this is not the case when the intensity
of light reflected from an object nears the outer limits
of the camera’s visible range. Cameras are not sensi-
tive to these areas and so noise causes the colour/hue
of an object to vary dramatically.
Figure 4: Shadow segmentation using an invariant colour
model (Salvador et al., 2001).
3 EXPERIMENTATION
3.1 Method
The following experiment aims to discover the corre-
lation between the effect of noise levels on hue and
the levels of the other two components of HLS colour
(luminance and saturation). These may be useful pre-
dictors as they represent the amounts of light coming
into the camera and an indication of the accuracy of
hue. A predictable correlation between these two fac-
tors enables countering these noise effects.
Different scenes were selected for range of colour
and brightness. The camera exposure period was up
to 30 seconds at a frame rate of approximately 15fps
to collect accurate HLS colour information for each
pixel of the scene over time. Each pixel was classi-
fied by means of averaging to a specific luminance
and saturation pair. Standard deviation of the hue val-
ues collected were calculated for each pixel. Hue vari-
ances are added to an array of minimum hue variance
for each luminance by saturation pair (256x256).
3.2 Results
Figure 5(a) shows the data extracted from this exper-
iment. It can be seen that at low and high luminance
and low saturation values with results indicating that
the amount of noise in hue can spike significantly.
There are also some scattered hue noise peaks in the
data as can be seen in the graph. These can be at-
tributed to other effects caused by the method of data
collection. With a near stationary camera, tiny move-
ments can cause large changes in pixel colour near the
edges of objects. Because of this the lowest variance
is always selected when duplicate luminance and sat-
uration pairs arise, this helps reduce these effects.
These results suggest that it is possible to correctly
predict the noise of a pixel without any temporal in-
formation. Luminance and saturation may therefore
be accurate predictors of the hue variance for any
given pixel.
3.3 Curve Fitting
From the data found in figure 5(a) we can see that,
with the correct formula, hue variation can be pre-
dicted. The problem is finding this fitting a mathemat-
ical curve to this data. By analysing a cross section of
the data along one axis at a time, it was found that
both axes closely fit an inverse squared curve which
when multiplied together produced a close fit to the
data. In the case of the luminance direction the sym-
metry means the term L is inverted half way.
When L < 128:
H = (
α
S
2
+ β)× (
γ
L
2
+ δ) (1)
Else:
H = (
α
S
2
+ β) × (
γ
(255 − L)
2
+ δ) (2)
To match the data from the previous experiment,
the coefficients found to be a close fit were: α = 2913,
β = 1.18, γ = 1974, δ = 0.6301. This produces the
predicted graph in figure 5(b). These coefficients
would be different for different cameras but the equa-
tion should still be the same. Each camera would need
to be calibrated for a specific noise curve.
3.4 Application
Figure 6 shows the different stages of this being ap-
plied to a frame of video beginning with figure 6(a).
HUE VARIANCE PREDICTION - An Empirical Estimate of the Variance within the Hue of an Image
7
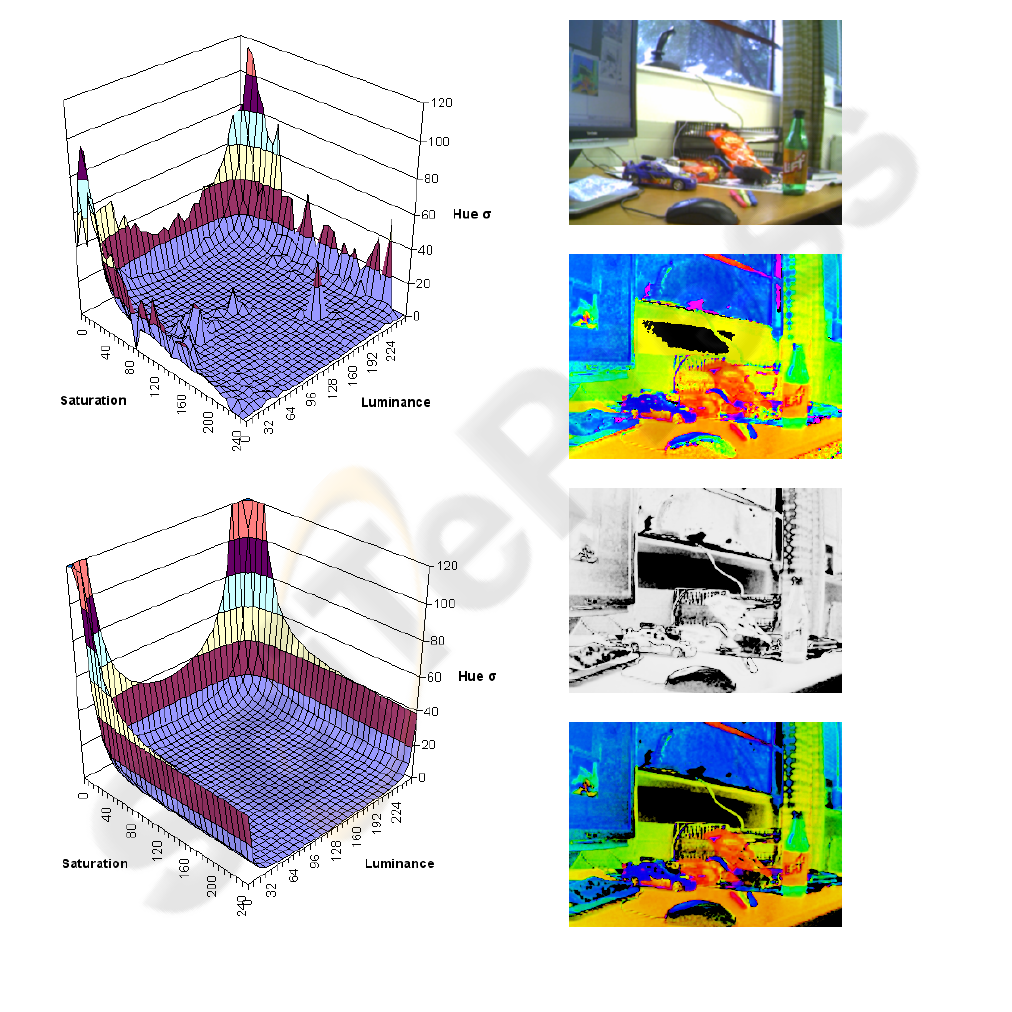
Figure 6(b) shows the image with only the hue com-
ponent remaining, this was done by converting to
HLS then setting luminance to 128 and saturation to
255 and then converting it back into the RGB colour
space. Figure 6(c) is formed by applying the equa-
tions 1 and 2 to the luminance and saturation from
the original image. This is then combined with the
hue image to form the image shown in figure 6(d).
(a)
(b)
Figure 5: Hue standard deviation vs. Saturation and Lumi-
nance (a) Experimental results (b) Predicted curve.
This image gives an indication as to how reliable the
colour data is and gives us an ideal entry into noise
reduction, edge detection, frame correlation or object
segmentation algorithms.
(a)
(b)
(c)
(d)
Figure 6: (a) Original image (b) Hue image (c) Predicted
hue noise image (d) Hue image with darkened noisy areas.
VISAPP 2007 - International Conference on Computer Vision Theory and Applications
8

4 CONCLUSIONS
This research is working towards creating an illumi-
nation invariance filter for colour camera input. This
can be used to better identify or correlate objects re-
gardless of changes in lighting conditions or viewing
angle. While white balancing and illumination invari-
ant colour models are on the way to achieving this,
they come across large amounts of noise when trying
to identify colours that have intensities outside of the
sensitive range of the camera. This research has reme-
died this by showing that an equation can be used to
predict how reliable colour values are across an im-
age. In this way correlation between a persistent rep-
resentation and the camera input can be made more
reliably.
5 FUTURE WORK
Now with colour error being accurately predicted in
video, further applications of this research can take
into account this noise and operate more robustly for
it. The current two directions of research following
on from this are image enhancement and frame cor-
relation. Using the overlaps of variance for neigh-
bouring pixels, a pixels colour and variance estimates
are narrowed to become more accurate. This means
slight variations in colour across an object due to cam-
era noise are minimised resulting in a cleaner image
for viewing or vision systems. Frame correlation be-
comes simpler as the computed variance of the pixel
will generally encompass the detected colour of same
physical point in following frames.
REFERENCES
Fintzel, K., Bendahan, R., Vestri, C., Bougnoux, S., Ya-
mamoto, S., and Kakinami, T. (2003). 3d vision sys-
tem for vehicles. In Intelligent Vehicles Symposium,
2003. Proceedings. IEEE, pages 174–179.
Grant, R. N. and Green, R. D. (2004). Tracking colour
movement through colour space for real time human
motion capture to drive an avatar. In Proceedings of
Image and Vision Computing New Zealand.
Lam, H.-K., Au, O. C., and Wong, C.-W. (2004). Automatic
white balancing using standard deviation of rgb com-
ponents. In International Symposium on Circuits and
Systems, volume 3, pages 921–924.
Nummiaro, K., Koller-Meier, E., and Gool, L. J. V. (2002).
Object tracking with an adaptive color-based particle
filter. In Annual Symposium of the German Associa-
tion for Pattern Recognition, page 353 ff.
Salvador, E., Cavallaro, A., and Ebrahimi, T. (2001).
Shadow identification and classification using invari-
ant color models. In IEEE International Conference
on Acoustics, Speech, and Signal Processing, vol-
ume 3, pages 1545–1548.
Takeno, J. and Hachiyama, S. (1992). A collision-avoidance
robot mounting ldm stereo vision. In Proceedings of
the IEEE International Conference on Robotics and
Automation, 1992., volume 2, pages 1740–1752.
Tsuji, T., Hattori, H., Watanabe, M., and Nagaoka, N.
(2002). Development of night-vision system. In IEEE
Transactions on Intelligent Transportation Systems,
volume 3, pages 203–209.
Vergs-Llah, J., Aranda, J., and Sanfeliu, A. (2001). Object
tracking system using colour histograms. In Proceed-
ings of the 9th Spanish Symposium on Pattern Recog-
nition and Image Analysis, pages 225–230.
Wang, J. M., Chung, Y. C., Chang, C. L., and Chen, S. W.
(2004). Shadow detection and removal for traffic im-
ages. In IEEE International Conference on Network-
ing, Sensing and Control, volume 1, pages 649–654.
Yao, J. and Zhang, Z. (2004). Systematic static shadow
detection. In International Conference on IPattern
Recognition, volume 2, pages 76–79.
HUE VARIANCE PREDICTION - An Empirical Estimate of the Variance within the Hue of an Image
9
