
THE PROTOTYPE OF HUMAN – ROBOT INTERACTIVE VOICE
CONTROL SYSTEM
Miroslav Holada, Igor Kopetschke, Pavel Pirkl, Martin Pelc, Lukáš Matela, Jiří Horčička
and Jakub Štilec
Faculty of Mechatronics and Interdisciplinary Engineering Studies, Technical University of Liberec
Hálkova 6, Liberec, Czech Republic
Keywords: Distributed speech recognition, robot control, image processing.
Abstract: This contribution shows our recent activities of human – robot voice-control system. The keynote lays in
design of a system that allows easy control and programming of various robots by a uniform interactive
interface. Generally the robots are actuated by sets of control commands, sometimes by a manual control
interface (touchpad, joystick). The operator has to know the control commands, syntax rules and other
properties necessary for successful robot control. Our system offers commands like “move left” or “elevate
arm” that are translated and sent into the corresponding device (robot). Speech recognition is based on an
isolated-word HMM engine with distributed recognition system (DSR). The vocabulary may contain
thousands of word and short phrases. It allows us to design an easy dialogue scenario for the robot control
system. The system allows direct robot control like moving or programming short sequences. A video
camera is included for displaying the working place and employed algorithms of image processing allow the
system to detect the position of objects in the working area and facilitate robot’s navigation.
1 INTRODUCTION
The goal of this project is a PC-software-based
interactive system for general-purpose robot voice-
control. This paper describes the designed prototype,
its structure and the dialogue strategy in particular.
The interactive control of robots could be used in
sp
ecial situations, when a robot is working in
dangerous areas and no programming beforehand is
possible. It could also be used in a situation when
supervised learning for robot’s later autonomous
operation has to be done, without knowledge about
the robot’s programming language. The presented
paper follows on this reality.
2 PROJECT FEATURES
The project is based on a former research. The
research involved a voice-control dialog system,
speech recognition vocabulary design and speech
synthesis feedback for user command confirmation.
Together with a scene manager and a digital image
processing module, it forms the core of the control
system as shown in figure 1. The components are
described below.
2.1 Scene Manager
The scene manager forms a connection between the
main program (engine) and the image processing
part. It actually controls the image processing
module and initiates image acquisition and
processing. Using the processed image data, it
updates the scene database, keeps track of objects
exposed on the scene and provides the scene object
and image data to the main engine. It is also aware
of the robot's coordinate system and plans the
robot’s movement when requested by the engine.
The database itself consists of two types of data.
It contains the
list of parametrized objects detected
on the scene as well as the robot calibration data.
The latter allows mutual image-space to robot-space
coordinate translation which is used in robot
navigation. Each object detected on the scene is
internally represented as a data object (class
instance), all the objects are stored in a dynamic list.
Some of the attributes are: a unique object identifier,
object's shape descriptor, central point coordinates,
307
Holada M., Kopetschke I., Pirkl P., Pelc M., Matela L., Hor
ˇ
ci
ˇ
cka J. and Štilec J. (2007).
THE PROTOTYPE OF HUMAN – ROBOT INTERACTIVE VOICE CONTROL SYSTEM.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 307-310
DOI: 10.5220/0001652603070310
Copyright
c
SciTePress
Sensors
Robot 1
Robot 2
Cameras
Di
g
ital ima
g
e
processing module
- calibration
- image
enhancement
- segmentation
- object detection
- ...
RS232
TCP/IP
CAN
Robotic Control
Module
Events mana
g
er
Main project engine
with GUI
Scene mana
g
er
- collision detection
- trajectory
- object tracking
DB scene
objects, working area
robot’s range
Scene image
output
Repositor
y
(Solved tasks,
commands, program,
dialogue log)
Voice
control
&
Dialogue
manager
Micro
p
hone
Head
p
hones
Reco
g
niser
(HMM)
TTS
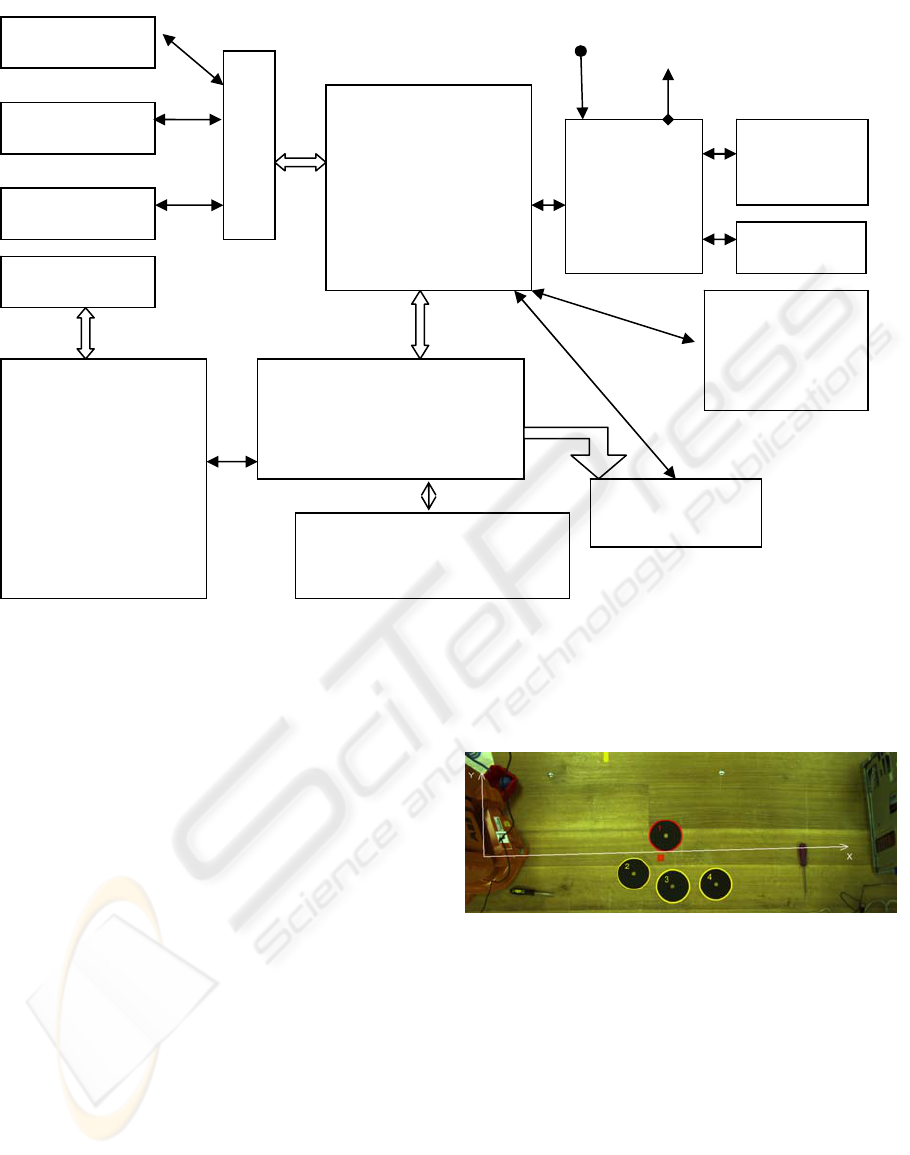
Fi
g
ure 1: Sche
m
eof the desi
g
ned s
y
ste
m
.
bounding rectangle etc. Such data allows smooth
object manipulation and serves as a base for object
collision avoidance along the manipulation
trajectory.
The scene manager also combines unprocessed
camera image with scene data to highlight detected
objects and to present them to the user via a GUI as
shown in figure 2. The user has a view of the
computer's scene understanding and may correctly
designate objects of interest in his or her commands.
Being in its early stages, the project currently
works only with 2D data and relies on the user's z-
axis navigation aid. The system is expected to
incorporate a second camera and 3D computer
vision in the future to become fully 3D aware.
2.2 Image Recognition
The robot’s working area is captured by a colour
high-resolution digital camera (AVT Marlin F-146C,
1/2’’ CCD sensor). The camera is placed directly
above the scene in a fixed position. We implemented
a simple interactive method to synchronize the
robot’s coordinate system (XY) and the camera’s
one using pixel units. We prepare modifications to
compensate geometric distortions introduced by a
camera lens.
Figure 2: Working scene with highlighted objects of
circular shape and robot’s coordinate system.
Digital image processing methods are placed in a
DIP library which is served by the scene manager
with the object database. Figure 2 shows the circular
object detection using the reliable Hough transform
(HT). HT is commonly used for line or circle
detection but could be extended to identify positions
of arbitrary parametrizable shapes. Such edge-based
object detection is not too sensitive to imperfect
input data or noise. Using a touch-display or verbal
commands it is possible to focus the robot onto a
chosen object (differentiated by its color or
numbering) and than tell the robot what to do.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
308

2.3 Robots Description
The prototype system uses a compact industrial
general-purpose robotic arm (ABB IRB 140). The
robot is a 6-axes machine with fast acceleration,
wide working area and high payload. It is driven by
a high performance industrial motion control unit
(S4Cplus) which employs the RAPID programming
language. The control unit offers extensive
communication capabilities - FieldBus, two Ehternet
channels and two RS-232 channels. The serial
channel was chosen for communication between the
robot and the developed control system running on a
PC.
Figure 3: Robots used.
The robotic control SW module simplifies the
robot use from the main engine's point of view. It
abstracts from the aspects of physical
communication and robot's programming interface.
It either accepts or refuses movement commands
issued by the core engine (depending on command's
feasibility). When a command is accepted, it is
carried out asynchronously, only notifying the
engine once the command is completed.
2.4 Distributed Computation
Most of the system's modules are developed and run
on a standard PC to which the robot is connected.
Since some of the software modules require
significant computational power, the system's
response time was far from satisfactory when the
whole system ran on a single computer. Therefore,
the most demanding computations (namely the
object recognition and the voice recognition) were
distributed to other (high performance) computers
via network (TCP connections).
3 DIALOGUE STRATEGY
The voice interface between an operator and the
controlled process is provided by a speech
recogniser and a text-to-speech synthesis (TTS)
system (both for Czech language). The TTS
synthesis system named EPOS was developed by
URE AV Prague. It allows various male or female
voices with many options of setting.
The speech recognition is based on a proprietary
isolated word engine that was developed in previous
projects. The recogniser is speaker independent,
noise robust, phoneme based with 3-state HMM
(Hidden Markov Models) and 32 Gaussians. It is
suitable for large vocabularies (up 10k words or
short phrases) and allows us to apply various
commands and their synonyms.
The dialog system is event-driven. We can
categorize the events into three fundamental
branches: operator events, scene manager events and
device events.
3.1 Operator Events
Operator events usually occur in response to
operator’s requests. For example commands which
are supposed to cause robot’s movement, object
detection, new command definition or detection of a
new object. This kind of event can occur at any time,
but the dialog manager has to resolve if it was a
relevant and feasible request or if it was just a
random speech recognition error.
Although the acoustic conditions in robotic
applications usually involve high background noises
(servos, air-pump), the speech recogniser works
commonly with 98% recognition score. If the
operator says a wrong command or a command out
of context (for example, the operator says “drop” but
the robot doesn’t hold anything) then the manager
asks him or her for a feasible command in the stead
of the nonsensical one.
3.2 Scene Manager Events
This sort of event occurs when the scene manager
detects a discrepancy in the scene. For example
when the operator says “move up” and the robot’s
arm moves all the way up until the maximum range
is reached. When this happens a scene event is
generated and the system indicates that the top
position was reached.
Other scene event occurs when the operator
wants to take up an object, but the system does not
know which one because of multiple objects
THE PROTOTYPE OF HUMAN – ROBOT INTERACTIVE VOICE CONTROL SYSTEM
309

detected on the scene. This event generates a query
to the operator for proper object specification.
3.3 Device Events
These events are produced by external sensors and
other components and devices connected to the
system. They are processed in the event manager
where corresponding action is taken. The response
manifests itself in the form of a request for the
operator, or more often causes a change in robot’s
behaviour.
The difference between scene manager events
and device events is that scene events are generated
by the system itself (based on a known scenario,
robot geometry, object shape and position). They are
computed and predictable. On the other hand, device
events’ time cannot be exactly predicted before they
actually happen.
3.4 Example of Dialog
For a simpler robot orientation and navigation the
positions on the scene are virtualized. They are
named by Greek letters like “Position α” or
“Position β”. These virtual positions may be
redefined to suit the operator’s needs. A blind-area
may also be defined and it is completely omitted
from any image processing and anything in this area
is completely ignored.
We can gather up black disks (see figure 2.) and
put them to some other place on the scene. This
place is defined like “Position α” and we setup the
“blind area” on the same coordinates. After that the
operator starts a dialog, for example:
“Start recording new command.”
“I’m recording” ...robot says
“Search objects”
“I’m searching ... Four objects were
found”
“Move on first”
“I’m moving ... Done”
“Take it.”
“Ok”
“Move on position alph
“I’m moving ... Done”
a.”
“Put it”
“Ok”
“Stop recording.”
“I stop the recording. Please, say
new command”
“Search” “Disks” “Done”
“New command is entered and named:
Search disks. Is it right.”
“Yes”
“Repeat command”
“Enter command”
“Sear
“OK”
ch disks”
....
“No object found. Repeating done.”
The robot finds the remaining three disks and
puts them in the selected area. If any disk cannot be
found then the robot interrupts executing the given
command and waits for next action.
4 CONCLUSIONS
The system is especially usable as an accessory
robot control interface for assistant and second-rate
operations. The presented prototype now cooperates
only with one industry robot (ABB) but the robotic
control module may easily be extended to support
other robots (Katana, mobile robots, etc.) as well.
The designed system offers robot control and
robot task programming even to people without
explicit programming language knowledge. It is
sufficient for the operator to know the Czech voice
interface of the presented system.
ACKNOWLEDGEMENTS
This work was supported by the internal grant IG
FM 2007/002.
REFERENCES
Nouza, J., Nouza, T.: A Voice Dictation System for a
Million-Word Czech Vocabulary. In: Proc. of ICCCT
2004, August 2004, Austin, USA, pp. 149-152,
Holada, M.: The experiences and usability of distributed
speech recognition system DUNDIS. In: Proc. of 14th
Czech-German Workshop „Speech Processing",
September 2004, Prague, Czech Republic, pp. 159-
162,
Hanika, J, Horak, P.: Text to Speech Control Protocol. In:
Proc of the Int. Conf. Eurospeech'99, Budapest,
Hungary, September 5-9, 1999, Vol. 5, pp. 2143-2146.
Šonka, M., Hlaváč, V., Boyle, R. D., Image Processing,
Analysis and Machine Vision. PWS, Boston, USA,
second edition, 1998.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
310
