
DEVELOPMENT OF AN AUTOMATED DEVICE
FOR SORTING SEEDS
Application on Sunflower Seeds
Vincent Muracciole, Patrick Plainchault
INRA;ESEO;LISA;GEVES-SNES, Université d’Angers, Angers, France
CER ESEO, Angers, France
Dominique Bertrand, Maria Rosaria Mannino
ENITIAA-INRA, Sensométrie - Chimiométrie, Nantes, France
GEVES-SNES, Beaucouzé, France
Keywords:
Machine vision, computer vision, seed identification, grain quality, seed quality, embedded systems.
Abstract:
Purity analysis and determination of other seeds by number are still made manually. It is a repetitive task based
upon visual analysis. Our work objective is to create and use a simple and quick automated system to do this
task. A first step of this machine has been reached by validating the image acquisition and feeding process.
The principle of this machine is based on a seeds fall with stroboscopic effect image acquisition. This article
presents the first step of creating a dedicated and autonomous machine which combines embedded constraints
and real time processes.
1 INTRODUCTION
In most countries, seeds cannot be commercialized
without an assessment of their quality. Quality control
tests generally includes the evaluation of unwanted
materials in the batches. This control is currently
performed manually by operators able to separate the
pure seeds from impurities.
In France, the official assessment of seeds is per-
formed by GEVES (Groupe d’Etude et de contrle des
Varits; Variety and seed study and control group). The
standardized methods of the ISTA (International Seed
Testing Association) and of the AOSA (Association
of Official Seed Analysts) are applicable to two kinds
of analyses of the seeds: purity analysis and deter-
mination of other seeds by number. In the analytical
analysis of purity, all the elements in a sample (pure
seeds (PS), inert matter (IM) and seeds of other plants
(SOP)) are identified, separated and weighed. The re-
sult is then given as percentage of each part’s weight.
In the determination of other seeds by number
analysis, only the impurities are separated, identified
and counted. The standardized methods of purity
analysis are very requiring since a one hundred per-
cent correct identification is expected. The visual in-
spection of seeds is time-consuming and needs oper-
ators to be trained. It is thus very desirable to develop
an automaton making it possible to do such controls.
Some mechanical devices are commonly used to
clean commercial seeds and separate them according
to their qualitative nature. It seems possible to add an
artificial vision system for completing the mechani-
cal step. The artificial vision domain follows closely
the quick growth of computer power. This evolu-
tion allows creating new applications which was not
possible until today. (Jayas D.S and Bulley, 1999)
(Moltó Enrique, 1998) (Egelberg P., 1994) (Pearson,
1994) (Wan, 2002) (Bennett, 2005)
Image analysis is not currently restrained to sim-
ple geometrical shapes and can be applied to complex
objects such as biological materials.
All the work dealing with the identification of
seeds proceed in two steps: extraction of features
from a digital images of seeds, processing the fea-
tures for building up a discriminant model. In most
of the published studies, the proportions of correctly
classified seeds reported by the authors hardly exceed
95 percent. Such figures are encouraging but proba-
bly not sufficient to allow the replacement of human
operators by machines.
Most of the recent studies are based on the
use of very complex discriminant methods involv-
311
Muracciole V., Plainchault P., Bertrand D. and Rosaria Mannino M. (2007).
DEVELOPMENT OF AN AUTOMATED DEVICE FOR SORTING SEEDS - Application on Sunflower Seeds.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 311-318
DOI: 10.5220/0001626103110318
Copyright
c
SciTePress

ing neural or Bayesian approaches (Chtioui, 1997)
(Granitto P.M. and Ceccatto, 2003) (Granitto
Pablo M and Ceccatto, 2003) (Majumdar S., 2000b).
These methods are often efficient but involve a very
time-consuming training phase. The parameters of
these predictive models (Kernels, neural weights) re-
quire to be stored in computer memories.
In a previous work, a vision system for the auto-
matic acquisition of images of individual seeds has
been designed and developed. Unlike other systems,
our device is based on dedicated hardware. This ded-
icated hardware has some limitations. These limi-
tations are directed by the embedded constraints: a
limited code size implementation, a low memory size
available, a limited binary mathematical operation, a
low frequency compared to a PC processor, limited
temperature dissipation and a limited integrated cir-
cuit size. Design and development of the vision sys-
tem include these different constraints (Plainchault P.,
2003). This is why it is not possible to implement
very complex algorithms for discrimination into an
embedded board and some choices have been made
in the design and the development of system.
A linear discriminant analysis (LDA) has been
chosen as a decision algorithm. LDA is applied on the
features extracted from the individual image of seeds.
In the present work, the features include morpho-
logical, colour and texture characteristics. Accord-
ing to the application, the discriminating power of
variables may change. Another way to reduce the
algorithms complexity is to select a few predictive
variables adapted to a given application. Moreover
in practical applications, a large part of the sample
can be accurately identified and it may remain only a
small proportion in which the discrimination is more
difficult. A relevant approach consists in using an au-
tomated system for a first screening and let the more
difficult part of the sample to be manually analysed.
Instead of computers, we propose to use an FPGA
(Field Programmable Gate Array). These hardware
components allow the implementation of a dedicated
architecture for vision chain. FPGA gives the pos-
sibility to apply massively parallel processes. We
present below the chain of vision and the mechanism
of image acquisition already in place. We finish by
the presentation of the method and the results.
2 ARTIFICIAL VISION
The chain of artificial vision (Figure 1) includes sev-
eral phases: acquisition, image processing, feature
extraction and decision. Each element of this chain
must be optimised in order to reduce computing time
and increase efficiency.
Figure 1: Vision chain.
2.1 Image Acquisition
Acquisition is a very important part of the perfor-
mance system. It determines the quality of the image
and the image processing time. A good image quality
is without noise and without defect of illumination.
These conditions are determinant for the image pro-
cessing speed and the level of the results.
The quality depends on the choice of three princi-
pal types of sensor, on the choice of the lighting sys-
tem and the selected background.
2.1.1 Sensor
The general principle of the sensors lies in the pro-
jection of a 3D scene on a 2D matrix where each cell
carries out the summation of the photons reflected by
the object into the scene.
• Mono CCD:
A mono-CCD sensor is generally organized ac-
cording to the Bayer mosaic. This matrix rep-
resents an alternation of separating cells of red,
green and blue colours organized as shown in Fig-
ure 2. This matrix indeed leaves zones where the
two others colours are not represented. In order
to fill this absence, some methods of interpola-
tion have been presented in this article (Gunturk
Bahadir K., 2005) . Some methods can privilege
certain features like anti-aliasing, shape enhance-
ment or noise reducing.
Figure 2: Mono CCD Sensor : Bayer Mosa ic.
• Three CCD:
Three ccd sensors do not need an interpolation
phases. Colour separation is made by a prism
which projects it onto three two-dimensional ma-
trices, one red, one green, one blue as presented
in Figure 3.
• Mono-chip Multichannel CCD:
This sensor has been developed by the Foveon
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
312
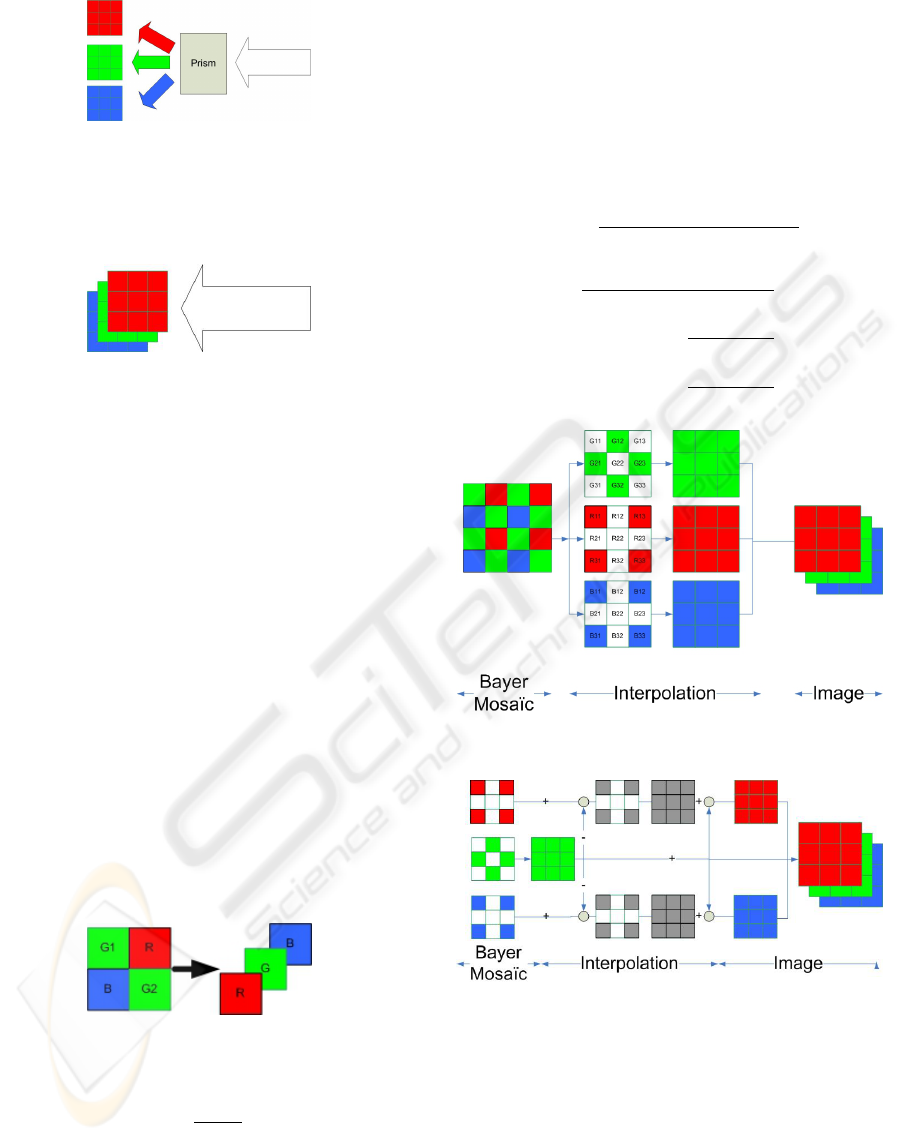
Figure 3: Three CCD Sensor.
company. It performs colour separation on the sil-
icon. This sensor comes back to the photosensi-
tive film principle as represented in Figure 4.
Figure 4: X3 Sensor.
2.1.2 Illumination Scene
Illumination is an important part to reduce image pro-
cessing time. The more homogeneous illumination,
we have. The quicker image processing, we have.
In our case, a good separation between background
and object is needed to maintain the real-time pro-
cess. The illumination system can be composed of
incandescent light, discharge lamps or light-emitting
diodes. The choice of these systems is determined by
the application and their characteristics.
2.1.3 Interpolation
The interpolation is a demosaicing phases for mono-
CCD sensors. There are two methods to obtain im-
ages in three channels. The first method, is to reduce
image size by calculating the average of green chan-
nel (1) and leave the red and blue channel as repre-
sented in the figure 5. The second is to use interpola-
tion methods that can maintain sensor size.
Figure 5: Representation of the image into the three chan-
nel.
G =
G1+G2
2
} (1)
The requirements of embedded systems are elemen-
tary binary mathematical operators. For that reason,
only bilinear and associated interpolation methods
have been retained. These methods are totally inde-
pendent and deterministic which respect the real time
and parallel processing system objectives. These in-
terpolations are reversible, avoid memory overloading
and reduce image transfer time.
There are two possible methods : the bilinear in-
terpolation represented in figure 6 and equation 2 and
5 (equation for red and blue channels are the same)
and the constant-difference-based interpolation repre-
sented in Figure 7.
G22 =
G12 + G32 +G21 + G23
4
(2)
R22 =
R11 + R13 + R31 + R33
4
(3)
R12 =
R11 + R13
2
(4)
R21 =
R11 + R23
2
(5)
Figure 6: Bilinear Interpolation
.
Figure 7: Constant-difference-base Interpolation.
2.1.4 Color Space
In general, the embedded systems operate using the
sensor’s RGB color space. Each channel in this space
are strongly correlated. The choice of the colour
space is dependant on the colour background. Gen-
erally a blue background is used for seed inspection.
This background needs a new color space to perform
seed extraction. The RGB space does not perform
DEVELOPMENT OF AN AUTOMATED DEVICE FOR SORTING SEEDS - Application on Sunflower Seeds
313
very well this process, so the conversion in the YCbCr
(equation 6) space can be possible and is the best to
perform this process. The choice of this space has
been made for the following reasons:
1. It is a matrix based conversion
2. It is a reversible transformation (linear transfor-
mation)
3. The distance between seed and background is
maximized
Y
Cb
Cr
=
0.299 0.587 0.114
−0.169 −0.331 0.5
0.5 −0.419 −0.081
∗
R
G
B
(6)
2.2 Feature Extraction
The extraction aims at defining object based on its
morphology, its colour and its texture. For this ex-
traction we need to extract the object and define his
position, we use for that a segmentation task and a
labelling task.
The segmentation algorithms used to perform
the seed positionning task is a variance-based algo-
rithm (Otsu, 1979).
The extracted features defining seeds are detailled
by many publications. These features are summa-
rized in (Majumdar S., 2000a) (Majumdar S., 2000b)
(Majumdar S., 2000c) and in the thesis of Younes
Chtioui (Chtioui, 1997). These features are around
110. There are three groups: morphological, colour
and textural. In the morphological group, there is
dimension, invariant moment and fast fourrier trans-
form type. In the colour group, there is standard de-
viation, mean, variance. In the textural group, there is
descriptor of texture, co-occurence, entropy, kurtosis
etc...
2.3 Pattern Recognition: Linear
Discriminant Analysis
Many identification methods (Chtioui, 1997)
(Visen N.S., 2002) (Majumdar S., 2000d) in the
domain of seeds are presented. Some of them cannot
be retained because they do not answer the embedded
constraints. This is why we privilege the simple
methods based on the distances between groups and
the methods of the regression type.
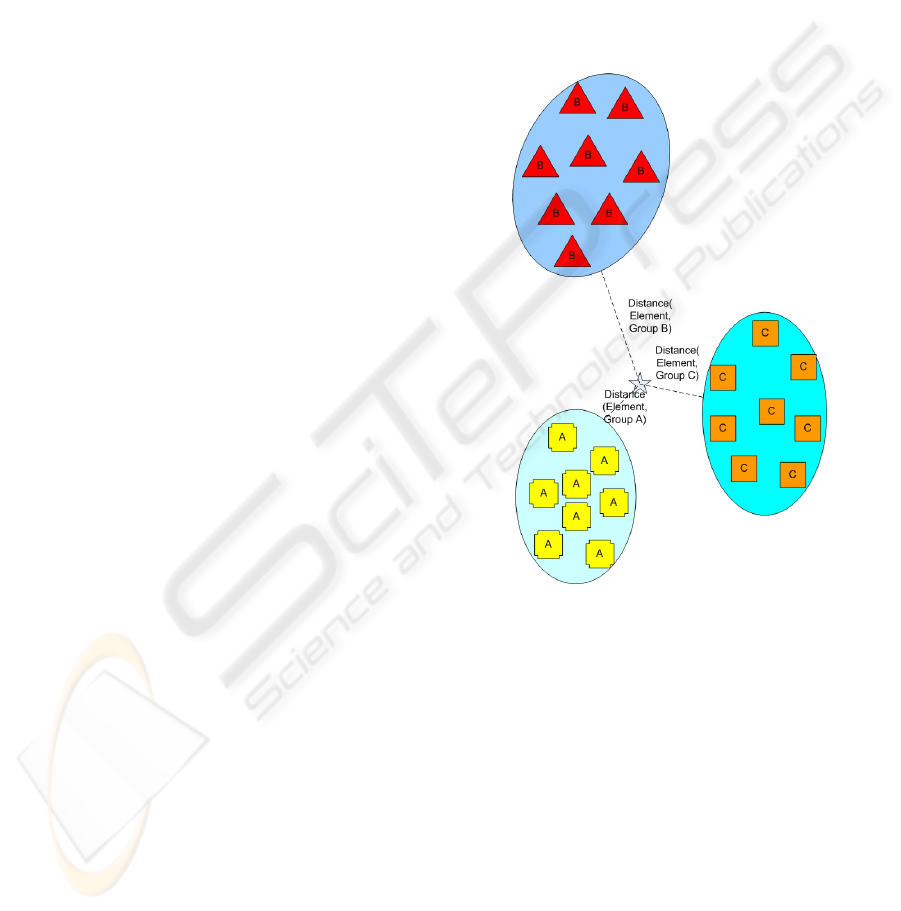
Some previous work show the feasibility of pat-
tern recognition in FPGA based systems (Miteran J.,
2005). An LDA method has been chosen. This
method is based on the principle of the minimal dis-
tance to a group of a given seed as shown in figure
8 and the equation. It is the type of decision algo-
rithm easily parallelisable, where each class are inde-
pendent of its neighbours. These methods and algo-
rithm has been associated to the Mahalanobis distance
(equation 7) in order to increase the distance between
classes. The x vector is the unknown seed to be clas-
sified. The µ vector is the mean value of a labelled
group features. The Σ value is the covariance matrix
for multivariate vector.
d
2
(x) = (x − µ)
T
Σ
−1
(x − µ) (7)
Figure 8: Principle of Linear Discriminant Analysis.
2.4 Hardware
The architectures presented in this section allow the
creation of dedicated systems based on work from the
computer world. They combine good computing effi-
ciency with low power consumption, low memory and
device monitoring constraints. These various points
make them the ideal components for the embedded
world.
2.4.1 MCU
Microcontrollers are circuits largely used for the man-
agement of the automated control processes. Al-
though not intended for mathematical computation,
the new evolutions of these components integrate
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
314

more and more mathematical calculating units (ex-
ample EP9315A from Cirrus Logic with mathemati-
cal coprocessor), and even cores DSP (example archi-
tecture OMAP Texas Instrument(TI)). However their
performance is still limited for signal processing.
2.4.2 DSP
DSP are processors dedicated to signal processing.
They combine the flexibility of a programmable pro-
cessor with performance in real time signal process-
ing. The new evolutions of these architectures saw the
capacities of calculation increased to the detriment of
consumption. However now they represent now a true
general purpose processor for the embedded domain.
2.4.3 FPGA
FPGAs see their uses and their applicability grow.
They combine the performances of a dedicated archi-
tecture and the flexibility of programming. FPGAs
are composed of independent logical cells which have
to be activated to create dedicated processes. Nowa-
days some signal and image processing are imple-
mented into these components and represent new ap-
plication for high efficiency and low cost systems.
3 MATERIALS AND METHOD
The automaton is based on a principle of free fall
seed (Plainchault P., 2003). It acquires an image of
each seed. It adds to it a stroboscopic effect breaking
up the movement of fall. In the long term, the au-
tomaton must reach a sorting at the rate of one seed
per second. The sorting in the broad sense covers ac-
quisition, the image processing, the extraction of the
parameters, the identification and, finally, the sorting
at the same time.
3.1 Device
The automaton is composed of a sensor, a flash, a
detection barrier, a background, an electronic system.
Figure 9 shows this association.
3.1.1 Seed Sorting System
• Mechanical feeding:
The mechanical feeding is based on an electro-
magnet which attracts a support heightened by
blades of metal.
• Sensor :
The sensor provides the frame grabbing function.
It is a Kodak KAC-1310 sensor with a resolution
of 1280*1024 and a clock frequency of 10MHz.
It has the advantage of having a window activa-
tion authorizing the activation of only a part of
the sensor. This function can increase speed of
acquisition because this speed is proportional to
the activated dimension.
• Flash Light :
The flash is ensured by 8 diodes luxeon lumileds
with a unit power of one Watt. This choice has
been done for the response time and robustness of
this component for the rate of one seed per sec-
ond.
• Barrier :
The detection barrier is based on infra red cells
functioning in saturated mode. It determines the
cut of the beam. For the moment, this barrier is
able to treat only sunflower seeds, sunflower ker-
nels, or sclerotia.
• Background :
A blue background was selected because it allows
a better segmentation of the object by using the
YCbCr colour space and extent the seeds varieties
• Embedded Card :
The electronic system lies on an embedded card.
It is a sundance SMT 355 card composed of a TI
DSP TMS320C32 and an ALTERA FPGA Flex
10K130E and 512 Kbytes of RAM. Its task is to
control the peripherals and perform simple pro-
cessing. Due to the architecture of the card, it
is not simple to implement image processing into
the FPGA. The FPGA does not have direct access
to memory and the memory space is too low to
implement image processing. But this card has
tested and validates the feasibility of acquisition
in free fall of object into embedded card.
3.1.2 Computer Validation of Embedded
Algorithm
• Computer
The electronic system also includes a computer.
It is a DELL computer with an Intel Pentium IV
3GHz with HyperThreading processor, 1GB of
DDR-SDRAM, a graphics board AMD/ATI X300
with dedicated memory and a 160GB hard disk.
The computer provides the Human-Machine in-
terface to control the automaton. It saves the im-
age acquired in Bitmap format on the hard disk
drive. The computer also plays a part in the al-
gorithm validation. The identification algorithm
DEVELOPMENT OF AN AUTOMATED DEVICE FOR SORTING SEEDS - Application on Sunflower Seeds
315
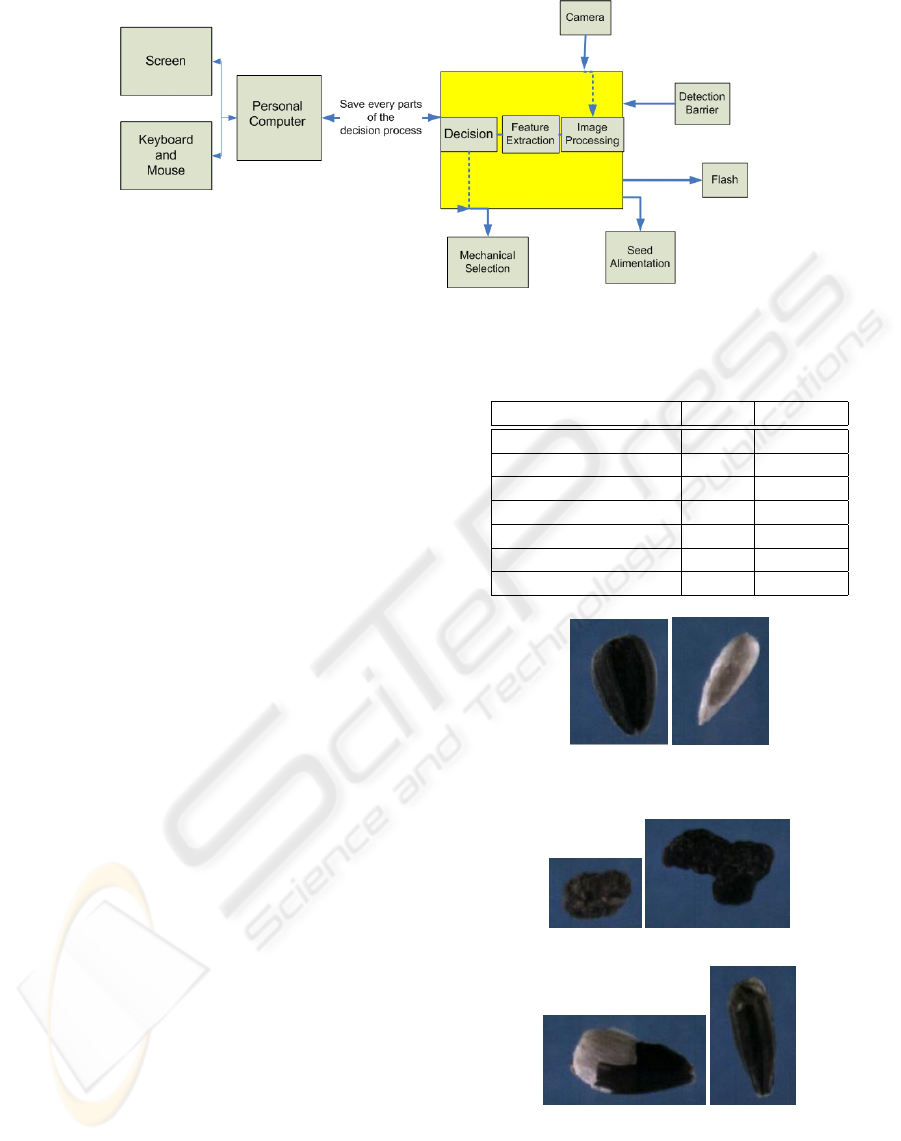
Figure 9: Presentation of the wanted system.
has been tested off line in order to determine its
efficiency for the sorting.
• Software
The automaton is controlled by a program imple-
mented in the computer using Visual C++. It pro-
vides a window interface to control the acquisi-
tion process. The algorithm validation is carried
out off line with the image acquired by the au-
tomaton under the environment of matrix algebra
MATLAB 7. Firstly, we calculate the parameters
for all the datasets. In order to have all the fea-
tures algorithms we just use the bwmorph func-
tion from the matlab image processing toolbox.
Secondly, we train and test the identification algo-
rithm on the dataset to select the best algorithm.
3.2 Methods
Seeds and impurities observed by the vision system
were extracted from 23 samples of sunflower seeds
representing commercial seed lots of various origins
and 18 varieties, differing by seed colour and size.
The dataset for impurities with a low frequency in the
samples was enlarged using the reference collection
of the GEVES-SNES. A dataset including 1051 im-
ages has been created. This dataset includes 6 classes:
sunflowers kernels, broken seeds (fragments of seeds
with a size higher than 50 percent of the size of the
seed), mutilated seeds (fragments of seeds with a size
lower or equal to 50 percent), sunflower achenes (in-
tact seeds), sclerotia and soil.
At this stage of the study, our dataset includes
all the categories (seeds and impurities) that have to
be identified in official analysis of commercial seed
lots (table 1) with the exception of seeds belonging
to other species than the sunflower. Figure 10 shows
colour, texture and morphology differences among
the different classes.
This dataset has been labelled by an expert of the
Table 1: Principle of the analysis in the framework of purity
and counting seed.
Object Purity counting
sunflower kernels PS
sunflower achenes PS
broken seeds PS
mutilated seeds IM
soil IM
sclerotia IM counting
Seeds of other plants SOP counting
(a) Sun-
flower
achenes
(b) Sun-
flower
Kernels
(c) Soil (d) Sclerotia
(e) Broken seeds (f) Mu-
tilated
seed
Figure 10: Image of pure seeds (a,b,e) and impurities (c,d,f).
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
316
GEVES-SNES. With this dataset we have conducted
a linear discriminant analysis using cross-validation.
We have randomly selected 348 images for the train-
ing sets and 703 for the testing sets in accordance with
table 2. We obtain a reduction of the feature space
with a stepwise canonical discriminant analysis ac-
cording to the article (Bertrand D., 1990). The selec-
tion of parameters is made incrementally by testing
the increase of identification percentage.
Table 2: Dataset representation of each groups.
Object training set testing set total
sunflower kernels 56 113 169
broken seeds 72 145 217
mutilated seeds 36 72 108
sclerotia 61 123 184
sunflower achenes 66 134 200
soil 57 116 173
total 348 703 1051
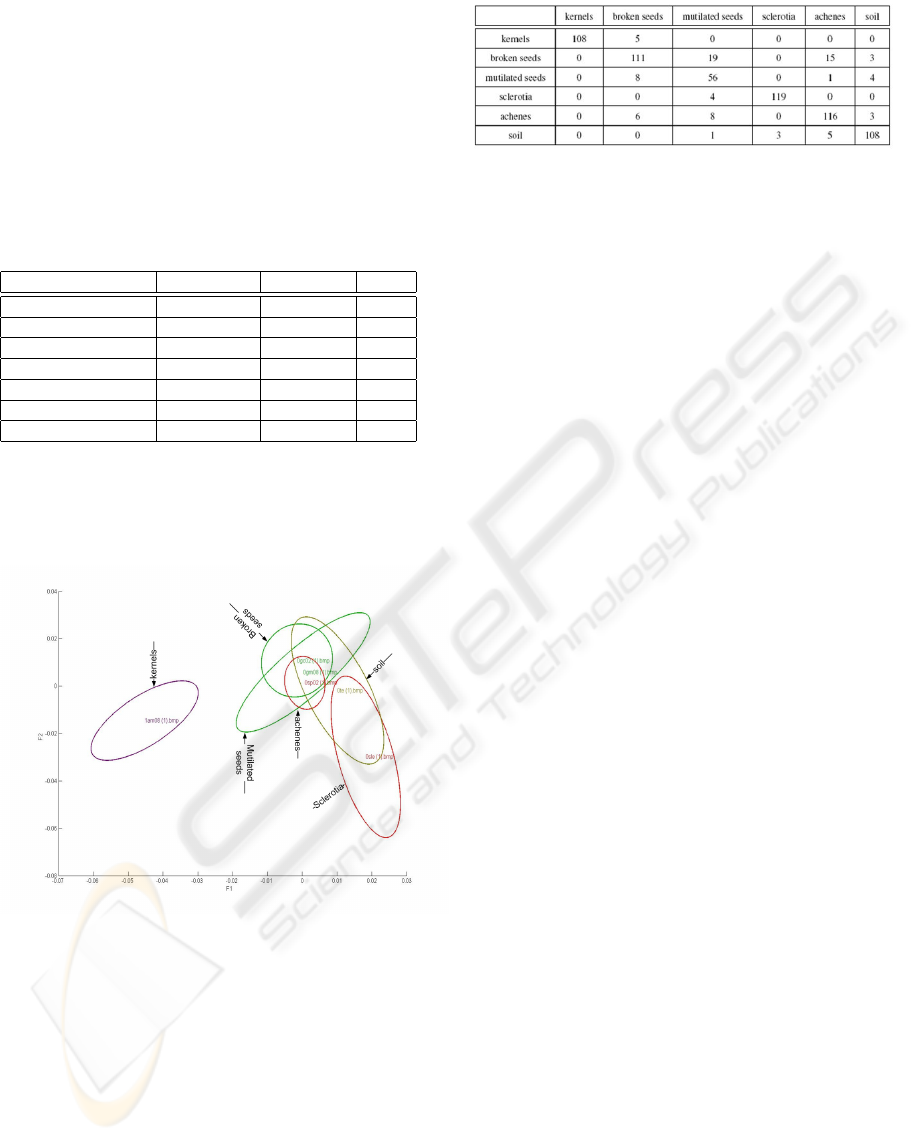
4 RESULTS
Figure 11: representation map of the sample.
The parameters selected by the LDA method show a
great extent of texture (energy, entropy, occurrence),
colour (mean, variance) and a few morphological
(perimeter, area, moments, Fast Fourier Transform)
parameters. Figure 11 shows the representation map
of the sample and table 12 indicates the identification
results for all the classes. A high percentage of each
class has been correctly identified: from 75% of bro-
ken seeds to 97% of sclerotia. Some misclassification
occurred, with the extent and importance that vary in
relation to the classes. If we seek to identify indepen-
dently each group, the selected features change but
follow what we have said before in the part 3.2.1. The
Figure 12: Differentiation sclerotia, achenes, broken seeds,
mutilated seeds, soil.
results expressed in table 12 is in accord with the map
of labelled groups (figure 11). The table 12 shows all
of the misclassifications identified on the map. Many
of the errors of classification are due to a lack of in-
formation in the image. The free fall principle with
only one camera has the same problem as on a rolling
carpet (Egelberg P., 1994): it is possible that the cam-
era does not take the image of the face bringing infor-
mation, which is the case after analysis of the badly
identified seeds. As we can note in table 12, there is
a strong confusion between broken seeds and muti-
lated seeds. The algorithm can not perform a virtual
representation of the associated pure seeds as the hu-
man expert can. From a practical point of view, we
could accept a misclassification when it affects pure
seeds (kernels, achenes and broken seeds) identified
as impurities (e.g. sclerotia classified as soil). In this
case, to achieve the analysis, the analyst will observe
only a fraction of the sample classified as impurities
by the system. Following this principle, the system
classification was less satisfactory for mutilated seeds
and soil: 13% of mutilated seeds were classified as
pure seeds (broken seeds or achene), 4% of soil as
achene. This first result shows the interest of the sys-
tem when a determination of other seeds is carried out
in sunflower: the algorithm makes possible 100% of
correct separation of pure seed (achenes or kernels of
sunflower) from sclerotia that are searched for in this
kind of analysis.
5 CONCLUSION
The widening of the dataset of image seeds to new
species is under acquisition.
The remaining work will consist of performing ac-
quisition, features extractions and decision in a com-
plete automaton. Optimisation and testing on other
varieties of the decision algorithm have to be con-
ducted.
Moreover the creation of a multi-camera system
of acquisition according to the same principle would
allow on certain ambiguities at the time of the phase
DEVELOPMENT OF AN AUTOMATED DEVICE FOR SORTING SEEDS - Application on Sunflower Seeds
317

of decision. It is also possible to make this approach
more robust by creating a unknown class for seeds at
equal distance from the various groups.
The testing on the identification algorithm on
seeds of other plants has to be made. System enhance-
ments have to be made like changing the infrared bar-
rier in order to extend seed varieties acquisition. The
design and the development of a new hardware sys-
tem have to be made in order to implement a three
camera systems.
ACKNOWLEDGEMENTS
This work was supported by the National Institut of
Agronomical Research (INRA), the variety and seed
study and control group (GEVES), the ESEO gradu-
ate school of engineering in electronic, and the LISA
laboratory of the University of Angers.
For their financial support the region Pays de Loire
and the CER Vegetal (French contract).
REFERENCES
Batlle J., M. J. (2002). A new fpga/dsp-based parallel. Real
time imaging, 8:345–356.
Bennett, T. D. K. F. M. M. M. (2005). A computer-
based system for seed identification. Seed Technology,
27:190–202.
Bertrand D., Coucroux P. Autran J.-C., M. R. R. P. (1990).
Stepwise canonical discriminant analysis of continu-
ous digitalized signals : applicatoin to chromatograms
of wheat proteins. Journal of chemometrics, 4:413–
427.
Chtioui, Y. (1997). Reconnaissance automatique des se-
mences par vision artificielle basée sur des approches
statistiques et connexionnistes. PhD thesis, IRESTE.
Davies, E. (2005). Machine Vision - Theory, Algorithms,
Practicalities.
Egelberg P., Mansson O., P. C. (1994). Assessing cereal
grain quality with a fully automated instrument using
artificial network processing of digitized color video
images. In Forestry and Biological Processing, vol-
ume 2345, pages 146–156. SPIE congress.
Granitto Pablo M, P. F. V. and Ceccatto, H. A. (2003). Au-
tomatic identification of weed seeds. ASAI.
Granitto P.M., P.A. Garralda, P. V. and Ceccatto, H. (2003).
Boosting classifiers for weed seeds identification.
JCS&T.
Gunturk Bahadir K., e. a. (2005). Demosaicking : Color fil-
ter array interpolation. IEEE Signal Processing Mag-
azine, pages 44–54.
Jayas D.S, M. C. and Bulley, N. (1999). An automated seed
presentation device for use in machine vision identi-
fication of grain. Canadian agricultural engineering,
41(2):113–118.
Majumdar S., J. D. S. (2000a). Classification of cereal
grains using machin e vision i. morphological mod-
els. American Society of Agricultural Engineers,
43:1669–1675.
Majumdar S., J. D. S. (2000b). Classification of cereal
grains using machine vision ii. color models. Ameri-
can Society of Agricultural Engineers, 43:1677–1680.
Majumdar S., J. D. S. (2000c). Classification of ce-
real grains using machine vision iii. texture mod-
els. American Society of Agricultural Engineers,
43:1681–1687.
Majumdar S., J. D. S. (2000d). Classification of cereal
grains using machine vision iv.combined morphology,
color, and texture models. American Society of Agri-
cultural Engineers, 43:1689–1694.
Miteran J., M. J. (2005). Automatic hardware implementa-
tion tool for a discrete adaboost-based decision algo-
rithm : Prototyping for machine perception on a chip.
EURASIP, 2005:1035–1046.
Moltó Enrique, Blasco José, B. J. V. (1998). Computer vi-
sion for automatic inspection of agricultural produces.
In SPIE, editor, Precision agriculture and biological
quality, volume 3543, pages 91–100.
Otsu, N. (1979). A threshold selection method from gray-
level histograms. IEEE Transactions on Systems, Man
and Cybernetics, 9:62–66.
Pearson, T. (1994). Machine vision system for automated
detection of stained pistachio nuts. In SPIE, editor,
Optics in Agriculture, Forestry, and Biological Pro-
cessing, volume 2345.
Plainchault P., Demilly D., F. A. T. S. B. D. (2003). De-
velopment of an imaging system for the high speed
identification of seeds. IEEE Sensor.
Visen N.S., J. D. (2002). Specialist neural network for
cereal grain classification. Biosystems Engineering,
82:151–159.
Wan, Y.-N. (2002). Automatic grain quality inspection with
learning mechanism. Information technology in Agri-
culture.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
318
