
OBJECT LIST CONTROLLED PROCESS DATA SYSTEM
Anton Scheibelmasser
CAMPUS 02, University of Applied Sciences, Automation Technology, Körblergasse 126, 8021 Graz, Austria
Bernd Eichberger
Graz University of Technology, Department of Electronics, Inffeldgasse 12, 8010 Graz, Austria
Keywords: Object oriented design, process control system, linked object list.
Abstract: The appropriate design of a system is one of the essential topics at the beginning of a new development
project. According to the intended purpose of a device the first step is to model the system in order to get a
structure for the implementation of the required features. In general the implementation of the system
requirements is split in hardware parts and tasks which are done in software. In case of the hardware design
the solutions for the challenges are mostly clear and supported by fundamentals of e.g. digital logic laws and
several design methods. If we think of the software part a lot of problems have to be solved without such
clear fundamentals. Object oriented design is one of the paradigms which promise a way for designing
stable and reliable software. A problem arises in this context if the used microprocessor platform is not
supported with a compiler for an object oriented programming language. In this case only the system
modelling could be done in terms of software objects and their relations, the implementation has to be done
in a procedural language. The following article is based on research work done in the development of a
modular process data system. Based on a sequential main program and interrupt driven hardware interfaces,
a software implementation without an operating system was implemented. By means of special software
structure called Linked Object List, object oriented design was implemented with the procedural language
“C”. Due to this design a reusable and flexible system was achieved which enables a high degree of
flexibility concerning the hardware configuration and system customization at the user site.
1 INTRODUCTION
Controlling a process in an industrial environment
requires the measurement of the relevant process
quantities. The use of process lines helps to master
the often very complex system structure. In order to
master this complexity, distributed small process
controllers operate through a network with a host
computer located at a central point of the plant. The
software design for such remote controllers requires
a high degree of flexibility to handle the various
hardware options. This can be achieved by using
intelligent software algorithms. Depending on the
specific hardware interfaces and the process line, an
adaptation in the field by means of parameterisation
or configuration can be performed easily.
2 DESIGN CONSIDERATIONS
Based on the generic user requirement specification,
at a first step the system requirements were
modelled in hardware and software parts.
In contrast to the hardware design, the software
structure is not so simply derived from the
specifications. On the one hand standard
applications which are available for microcontroller
designs and digital circuits like LCD interfaces or
PC-Card implementations are not available, on the
other hand basic conditions of the system (e.g.
operating system, programming language,
development platform) have to be defined.
One paradigm in the field of software
development is the usage of object-oriented methods
to analyze, model and implement the software
requirements. Object-oriented design (Stroustrup,
1991) requires the modeling of the problem by
means of a data structure called Class. The goals of
351
Scheibelmasser A. and Eichberger B. (2007).
OBJECT LIST CONTROLLED PROCESS DATA SYSTEM.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 351-354
Copyright
c
SciTePress
such a design are to hide the complexity
(abstraction) and to protect the data effectively. If
we model our system according to these principles
we can structure our software into different classes
(objects) and their interfaces (methods). A system
build up in this way supports the developer with a
lot of advantages concerning reuse, maintenance and
stability.
A problem occurs if the used microprocessor
platform is not supported by a compiler for an
object-oriented language. For many controller
platforms only a C-compiler is available but no
C++-compiler. A typical solution for this problem is
a trade-off between the economical/technical
decision for a microcontroller and the software
development restrictions concerning the object-
oriented language. But the missing of an object-
oriented language does not imply that we have to
develop our software without object-oriented
principles. A good practice is to analyze and to
model the software requirements with object
oriented tools and methods (e.g. UML -diagrams).
The implementation is done later in a procedural
language with a few restrictions. For the
implementation of object-oriented designs with the
procedural language C, a trade-off can be achieved
by replacing the C++-class with the C-structure.
The methods (member functions) can be replaced as
function-pointers in such a structure. Protection
mechanisms are possible by putting such a C-
structure into a single C-File and to control the
visibility of the attributes (member variables) by
means of an H-File (header file). Therefore access to
the members of the C-structure is only possible by
means of dedicated member functions (e.g. get(),
set()). Another aspect is the instantiating of classes
as objects. This feature can be implemented with
arrays of such structures.
3 SOFTWARE DESIGN OF THE
PROCESS DATA SYSTEM
To analyze and model the requirements of the
process data system, UML diagrams (Fowler, 1999)
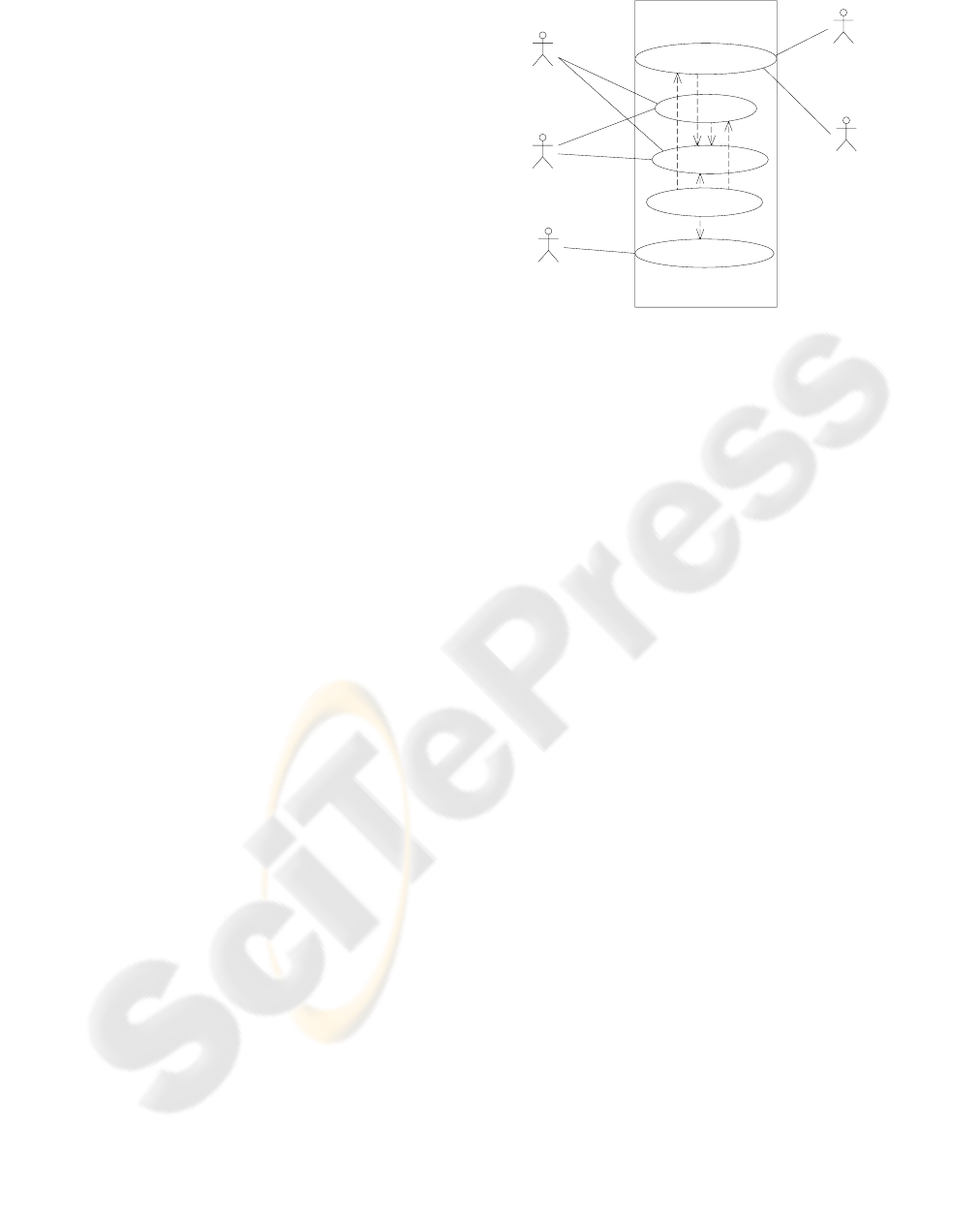
were taken to get an overview of the system. As a
first result of the requirement analysis the use case
diagram (figure 3) was generated. A central part of
the system represents the application program which
is optionally extendable with programs on a memory
card (update, user applications). Depending on the
configuration of the system, process variables are
measured, calculated and distributed to the host
computer or to the graphical display.
Process Data System
Data Evaluation
Process Control
Update, User Application
Sytem Configuration
Application Program
Data Distributer
LCD, Keyboard
Host Computer
PCMCIA User
Transmitters
Process Equipment
Cadifra Evaluation
www.cadifra.com
Figure 1: Use Case Diagram of the Process Data System.
The configuration process is one of the central tasks
in the system. Program handling, data measurement
and distribution as well as the handling of the
transmitter and process environment options should
be handled according to the configuration data. To
manage the versatility of transmitters, process lines
and process equipments a generic algorithm was
necessary.
3.1 Process Data Object
In a next step of the software development process
the modelling of the system by means of classes
(objects) has to be done. In order to handle the
demanded versatility, a Data Object Class was
introduced. Every process parameter, variable or
constant should be an instance (object) of this class.
A few attributes of the object control the behaviour
of the process value in the device. For every
component of the system one attribute of the class is
responsible for controlling the data handling. For
instance, if the process variable
density should be
measured and shown on the display a member
variable
HARDWARE-MASK and DISPLAY-MASK has
to be set appropriately. Depending on this object
definition, every module in the software has to be
written generically. This implies that the respective
program part has to evaluate the attributes of the
data object before handling the process value.
Process Data Objects are very flexible concerning
their handling in terms of definition. Hence user
specific object definitions are able to extend the
constant object definitions of the main system.
Therefore a flexible way of customizing the default
system is possible. For instance, the system software
can be extended by means of an external data
memory which stores additional Process Data
Objects.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
352

A Device Builder component, implemented by
means of a state machine, prepares the basic state
values for the Process Objects. The state function of
the Device Builder interacts with several
components in a sequential way. Starting with the
invocation of the measurement tasks, the application
program, the visualisation and the host
communication, interfaces of the respective
components are used. The Process Object
component plays a central role in the system. Every
component has to evaluate the attributes of the
handled process data objects to get information
about the intended use, the type and the specific
handling of the values.
3.2 Implementation Issues
Based on the system modelling and the demanded
requirements, a few basic conditions have to be
defined. One decision concerns the usage of an
operating system, another one the selection of the
appropriate programming language.
In order to meet economical aspects and
based on experiences from former projects, a
decision was made not to use an operating system.
Supported by the fact that the given requirement
does not need operating system support like e.g. file
system, network stack or multitasking, lower
memory requirements have been achieved. The real
time aspect in this context has already been solved in
a former project with the implementation of the
measurement tasks based on interrupt driven
transmitter routines.
The second question concerning the
programming language was solved with the
selection of the used microprocessor for
economical/technical reasons. As the development
platform of this microcontroller (Keil, 2007)
supports only the procedural language “C”, the
object oriented design has to be implemented as a
trade-off in a procedural way. Based on these
decisions the main frame of the software was
implemented as a sequential main()-procedure
supported with interrupt driven routines for
interfacing the process equipment (e.g. transmitters).
To support distributed development and reuse for
further projects, the graphical system for the LCD
was implemented as separated procedures and linked
by means of a software-interrupt (Graphic-BIOS).
One of the central points in this context was the
implementation of the Process Data Object class by
means of arrays of C-structures.
3.3 Procedural Object Class
Implementation
According to the language “C” the Process Data
Object was implemented as C-structures. As there
are a lot Process Data Objects in the system, a
constant array of such structures was defined.
Instead of instantiating objects, a constant array of
structures was defined which represents the main
definitions of the system’s behaviour. Every
structure incorporates a name, a type and behaviour
attributes for the process data. Based on the type of
data a method, implemented e.g. as a function
pointer, is responsible to access the respective value.
Based on the requirement to extend the software at
the customer site special process data objects were
introduced with the object type
OBJ-LINK, and
OBJ-LAST. Due to this definition it was possible to
connect several Process Data Object arrays in a way
which is called Linked-List. By means of this inked
object list it was possible to extend the basic
definitions of the system behaviour with customer
definitions at compile time or later in the field by
means of structures located at the mobile memory
card. A central procedure was introduced to search
for an object in this linked list.
Based on the object’s type in the structure this
procedure was able to evaluate the
OBJ-LINK type
and to connect several arrays of structures.
Depending on the start point of the search (e.g.
system memory, customer memory, PC-Card card) a
certain priority was achieved which is usable to
override (customize) basic system definition.
For instance with the introduction of new object
definitions on the memory card, new process data
readings or menu items are available in the process
data system. The following code fragments are
intended to give an impression of the structure
definition and the outlook of the object list.
typedef struct
{
NAME name;
union
{
unsigned long c_li;
NVPARA * p;
FUNC_adr funct;
unsigned long * i;
float * df;
char * str;
NAME * nstr;
} data;
char d_name[MAX_DLEN+1];
char d_unit[MAX_DLEN+1];
char d_format[MAX_DLEN+1];
char hierarchy[MAX_BRANCH+1];
unsigned char hardware_mask;
OBJECT LIST CONTROLLED PROCESS DATA SYSTEM
353

unsigned char handle_attrib;
unsigned char obj_type;
} OBJECT;
const OBJECT Test_Object_Table[] =
{
{
"Main-Menu", NULL,
"","","",
{0,0,0,0,0,0,0,1},
TM_NONE,
D_MENU,
OBJ_MENU },
{
"Temp",(float*)&MEAS_results.pte,
" Temp."," [ \xf8""C ]","%8.2f",
{0,0,1,5,5,6,ALL,13},
TM_NONE,
D_MENU | A_ASSIGN,
OBJ_FLOAT }
// a lot of additional objects …
}
As shown in this structure and their definitions, not
only attributes concerning the visualisation and the
hardware are available but also definitions for the
format and the hierarchies in menu trees. The Device
Builder component was implemented as a state
machine in the main() -procedure of the program.
Depending on the state function (Data Visualisation,
Menu Selection, Parameter Edit or Adjustment,
System Configuration) criteria are set which
influence the search procedure (e.g. getobject()). So
if every component uses the Linked Object List with
the process data definitions, a pure generic system is
established which enables a high degree of dynamic
concerning the implementation of hardware- or
software options.
4 RELATED WORKS
Innumerable publications describe different methods
of achieving reusable object-oriented software
designs. One of these methods is called Design
Patterns (Gamma, 1994). The idea is to use elegant
and proven solutions for dedicated problems to
model the core of the software at the start of the
design. The method of mastering the complexity and
the high dynamical efforts of hardware/software
options in the system by means of Object List
controlled procedures is similar but not identical to a
design pattern called Command (Gamma, 1994).
This pattern is described as an encapsulation of a
request in an object. By means of this pattern clients
could issue request to objects without knowing
anything about the operation requested. In this
context process data objects can be seen as such
requests to other clients (components of the system).
In this work the idea was modified and extended
with features of linked lists to handle the demanded
customization. A further idea was the
implementation of such a pattern in a procedural
language.
5 CONCLUSIONS
In the development of a new process data system
high requirements concerning the implementation of
different hardware options and customization
features were fulfilled. The introduction of an
“Object List Control” structure has significantly
enhanced the stability, robustness, maintenance and
extensibility of the software structure. Depending on
this structure a high degree of flexibility was
achieved and the requirements concerning
customization at the vendor’s site and in the field
were met. The object list structure has proved its
capability to solve the problem of customization by
binding different device configurations (object lists)
at compile or at runtime. Based on this list control
new device features can be added by means of
mobile data cards. From our point of view this
method is advisable if there are a lot of configurable
options defined in the system or in case of weak or
partial requirement specifications. In both cases a
high degree of flexibility in software design is
needed. The open “Linked Object List” is a generic
approach which allows upgrading the system
behaviour without recompiling the whole software.
REFERENCES
Stroustrup B., 1991. What is “Object-Oriented
Programming?”. AT&T Bell Laboratories Murray
Hill, New Jersey 07974.
Fowler M.,UML Distilled, Second Edition, 1999, Addison-
Wesley
CADIFRA, UML Editor, 2005, www.cadifra.com
KEIL GmbH, 2007, C166 Development Tools,
www.keil.com
Gamma E., Helm R., Johnson R., Vlissides J., Design
Patterns, 1994, Addison-Wesley
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
354
