
WEB-BASED INTERACTIVE POSITIONING CONTROL OF AN
ELECTRIC FLATCAR VIA WIRELESS NETWORK
Ken Ishii, Koki Abe and Yoshimi Takao
Natl. Res. Inst. of Fisheries Engineering, Fisheries Research Agency,
7620-7, Hasaki, Kamisu city, Ibaraki 314-0408, Japan
Keywords:
Electric flatcar, manipulator probe, model of WEB direct-access monitoring, double exclusive control, con-
troller and multiple-monitor system.
Abstract:
A large tank has been used for target strength pattern measurements of fish. It is equipped with an electric
flatcar. Further an elevation-rotating unit runs on the rails above it. The probe on the top of its elevation unit
is equipped with an attachment for an ultrasonic transducer. The manipulator probe is movable in the four
directions of the x, y, z and θ axes. Installation of a remote control switch has been required for the purpose of
efficient operation of an electric flatcar. A remote control system using a notebook personal computer has been
developed with good cost performance. The PC is equipped with a wireless network interface card. A model
of WEB direct-access monitoring has been designed newly on the basis of the concept that an operator can
control a mechanical device using a WEB Browser via LAN. Furthermore it performs double exclusive control
for access from multi PCs, and has made possible a controller and multiple-monitor system. The mission was
performed for the purpose of evaluation of WEB operation. The result has made clear the specifications for
motion, and an external interface of the electric flatcar is applicable to the new protocol developed for WEB
Browser control.
1 INTRODUCTION
An indoor tank filled with fresh water has been used
for target strength pattern measurements of fish (Ishii
and Takao, 2000), and its shape is 10(W) x 15(L)
x 10(H) m
3
. It is equipped with an electric flatcar.
Further an elevation-rotating unit runs on the rails
above it. The probe on the top of its elevation unit is
equipped with an attachment for an ultrasonic trans-
ducer as shown in Figure 1 (Ishii et al., 1995). Instal-
lation of a remote control switch has been required for
the purpose of efficient operation of an electric flatcar.
A remote control system by a WEB Browser using
a personal computer (PC) has been developed with
good cost performance. Generally, WEB Browser
displays a page from a web sever responding to a re-
quest of a client. A long reply time is not applicable to
WEB Browser. But, the reply time of a target mechan-
ical device accessed by a web server varies widely.
The issue is development of a protocol for receiving
reply messages from a target machine. The commu-
nication method of this system is described in detail
in this paper.
2 METHOD
The probe can move four-dimensionally. The nominal
precision is ±1 cm along the longitudinal and trans-
verse axes, ±2 cm along the elevation axis, and ±0.2
degree around the rotation axis. Resolutions of abso-
lute encoders for positioning are 1 mm and 0.01 de-
gree, respectively. Parameters of velocity are limited
between 1 and 20 cm/s along the longitudinal axis, 1
and 10 cm/s along the transverse axis, and 0.2 and 3.0
degree/s around the rotation axis.
The sequencer (PLC, Programmable Logic Con-
troller) directly controls the electric flatcar every
10ms. Interval of communication between the PC
and the sequencer is one second using DDE (Dy-
namic Data Exchange) protocol via P-LINK (Proces-
sor Link) (Ishii et al., 1999).
323
Ishii K., Abe K. and Takao Y. (2007).
WEB-BASED INTERACTIVE POSITIONING CONTROL OF AN ELECTRIC FLATCAR VIA WIRELESS NETWORK.
In Proceedings of the Fourth International Conference on Informatics in Control, Automation and Robotics, pages 323-326
DOI: 10.5220/0001616103230326
Copyright
c
SciTePress
Longitude
Transverse
Rotation Elevation
(a)
(b)
(c)
(d)
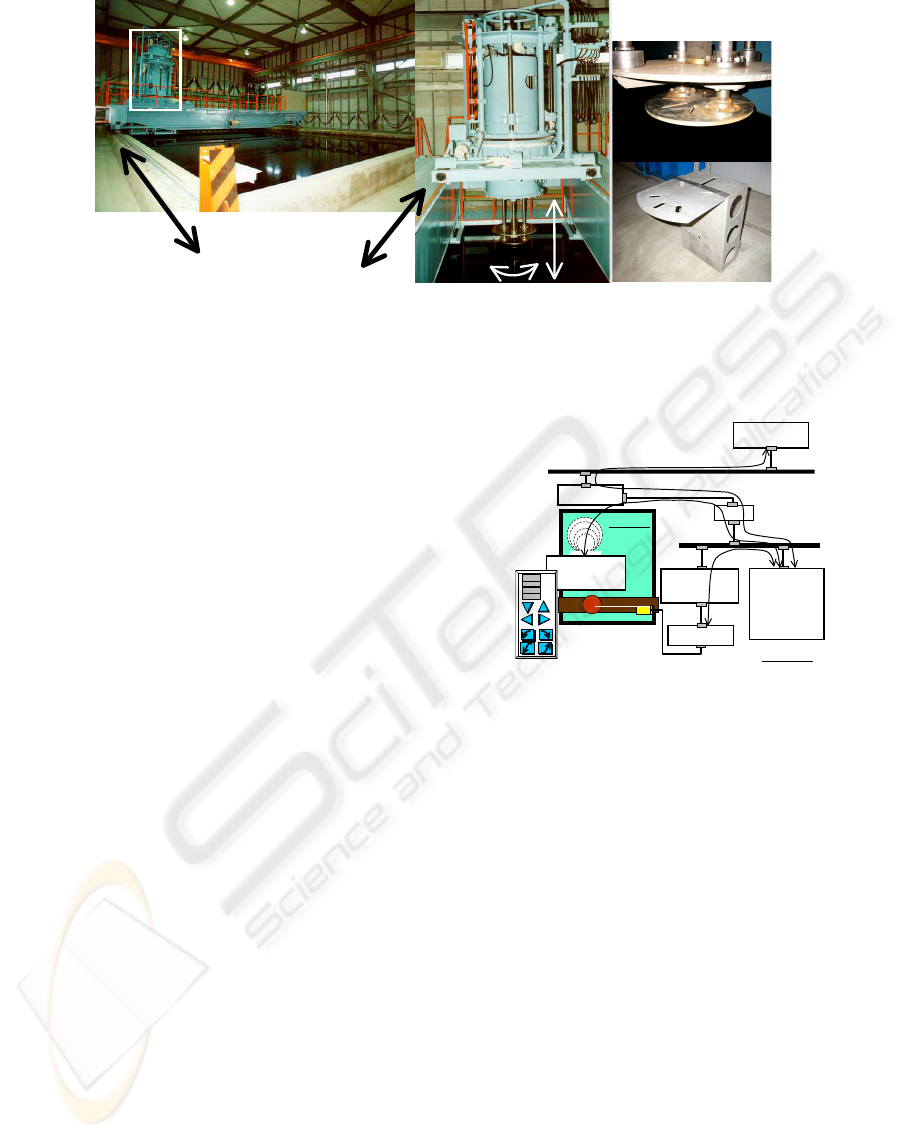
Figure 1: The electric flatcar and its movable directions shown by arrows. (a) The electric flatcar on a large tank. (b) An
elevation-rotating unit on it includes a movable probe. Two devices of (c) and (d) are used in the joint mission. (c) An
attachment on the top of a probe in the electric flatcar. (d) An adaptor for a transducer.
The function of a remote control switch has been
realized by a notebook PC equipped with a wireless
network interface card that is implemented more eas-
ily than a specified low power radio wave unit. The
model of WEB direct-access monitoring has been de-
signed newly on the basis of the concept that mul-
tiple users control or monitor a mechanical device
using a WEB Browser via LAN (Local Area Net-
work). It consists of a main server program that per-
forms exclusive control for access from multi PCs,
and makes possible a controller and multiple-monitor
system (Ishii and Sawada, 2005). Figure 2 shows
its application to the remote control switch function
for an electric flatcar. The driving control command
through the main server program does not access the
database that holds the values, but accesses the device
driver program that operates the instrument instead.
The mission was performed for the purpose of
evaluation of WEB operation. The mission is
achieved by bringing an attachment of a probe close
to an adaptor for a transducer shown in Figure 1. In
this mission, the speed is one or two cm/s in the trans-
verse direction, one cm/s in the elevation direction,
and 0.2 degree/s in the rotation direction (Ishii et al.,
2006).
3 RESULTS
A WEB Browser display of a remote control switch
function has dual modes of ”DRIVE” and ”JOG”.
Furthermore, each mode consists of two inde-
pendent frames of ”SUBMIT COMMAND” and
”POLLING”. An example of ”DRIVE” mode is
shown in Figure 3. The time chart is the following:
Water tank
Electric flatcar
PC_Ctrl
Wireless NIC
Notebook PC
Remote control
switch function
+
+
−
−−
−
−
−−
−
123.8
97.84
473.1
567.4
*1
LAN
WEB Monitoring
PC_Moni
*2
Router
Intranet
*3
Hub
Control room
PC_Log
Main server
program
Logging program
Device driver
program
PC_ Device
DDE, P-LINK
PLC
Figure 2: The model of WEB direct access monitoring ap-
plied to a remote control switch function. Widely located
WEB Browsers post request commands to the main server
program respectively via the routes *1 or *2 on a network.
The main server program directly accesses, via route *3,
a device driver program of an electric flatcar in order of a
session.
• A negotiation command for priority was sub-
mitted from the controller PC at a time of
15:38:38.040, and a transverse driving command
was submitted at 15:38:38.056. The left command
frame was shifted to Figure 3-(b) from Figure 3-
(a).
• During movement, polling is repeated by a moni-
toring frame.
• After a submission of a STOP command at
15:38:51.415, an end flag of driving was detected
at a time of 15:38:52.087.
• By control from a right polling frame, a page
of left command frame was renewal to a waiting
page of Figure 3-(a) at a time of 15:38:52.368.
Among the mission for evaluation, access of a
PLC from a remote control switch and monitor PCs
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
324
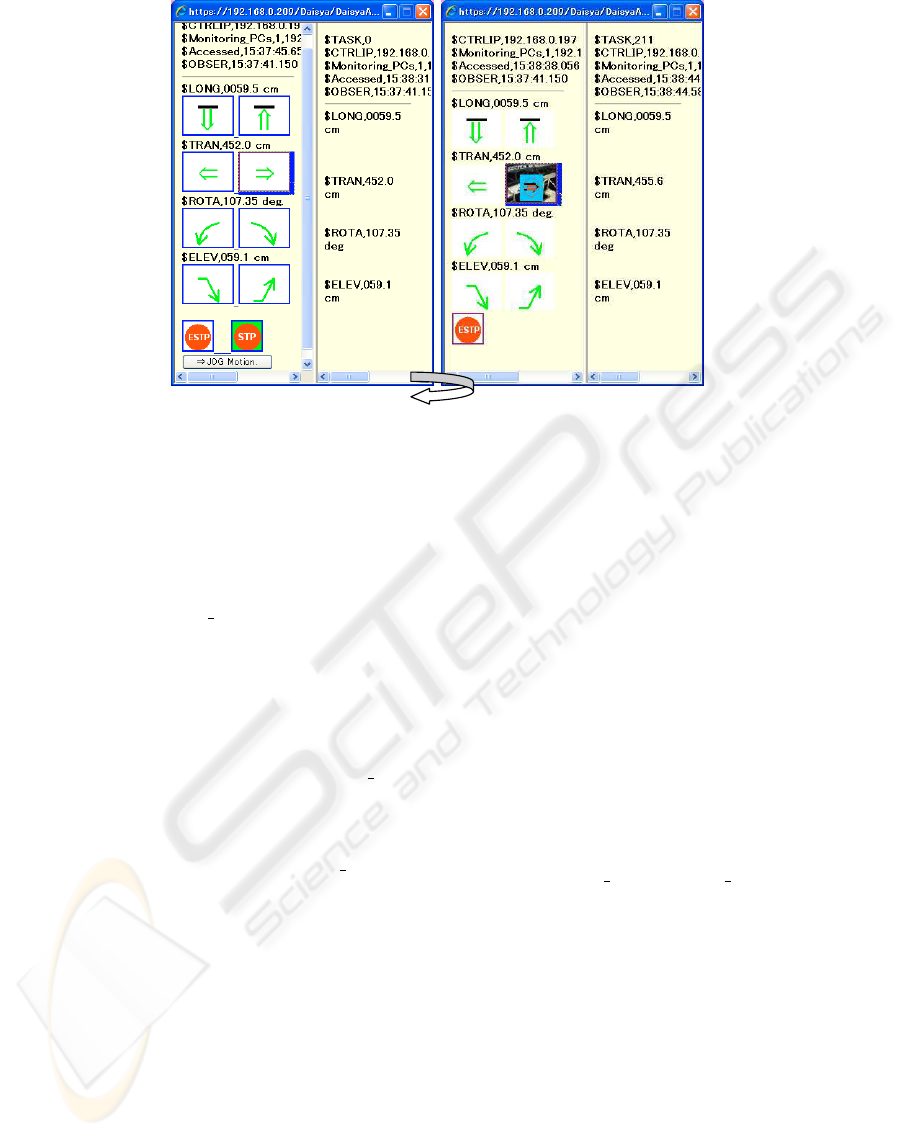
(a) (b)
Figure 3: Design of the DRIVE mode with START/STOP. From upper icon, control buttons show the four directions ”longi-
tudinal”, ”transverse”, ”rotation”, and ”elevation”. A driven direction is selected by a tab key or a mouse. The left figure (a)
shows a mode of WAITING, and a foreward direction of ”transverse” is focused. The right figure (b) shows a status of driving
operation.
was performed via Intranet or LAN as shown in Fig-
ure 4 for a typical example. In this figure, the X-axis
shows time in seconds. ”PC
Ctrl” of the Y-axis works
as a controller with a remote control switch function.
A WEB Browser performed polling in intervals of five
seconds for the monitoring, or two seconds for the
driving. Each access to a main server is classified by
a session ID, and is ordered by double exclusive con-
trol. A transverse driving command ($DRIVE) was
submitted from the controller PC (named PC
Ctrl)
at a time of 17:35:38.571, and a stopping command
($STOP) was submitted at 17:35:56.096. Positioning
information of the electric flatcar is given per access.
On the other hand, a logging PC (named PC
Log) re-
ceives renewal data at an interval of about one second
linked with changing of values of position. The probe
of the electric flatcar moved from 384.6 cm to 370 cm
at the minimum velocity of one cm/s along the trans-
verse axis. It has been confirmed that a WEB Browser
on the controller PC is available to be performed in
repetition of one second. Furthermore, the number
of PCs for WEB monitoring has been confirmed nor-
mally for Four PCs.
Three kinds of commands such as a negotiation
command for priority, driving commands and a stop-
ping command, are submitted sequentially from a
command frame of a controller PC. On the other
hand, in a monitoring frame, polling is performed for
the purpose of acquisition of positioning information.
Averaged reply times for drive commands are shown
in Table 1 in addition to needed times for acquisition
of moved position information.
4 DISCUSSIONS
Dual modes of motion operation are available to be
changed to the other interactively. The DRIVE mode
with START/STOP is used for driving of long dis-
tance. The JOG mode is useful for short range driv-
ing, about one cm. And Driving of a fixed distance
such as JOG mode is needed for safety of operations.
In Figure 4-(b), it is shown that access timing of
multiple PCs (PC
Moni and PC Ctrl) was success-
fully ordered by double exclusive control of a main
server program.
In Table 1, it takes several seconds for acquisition
of first positioning data owing to lower initial speed.
After second positioning data, it takes about one sec-
ond. It takes about six ms for negotiation of priority.
Positioning data is obtained at the same time of ne-
gotiation of priority. And in the monitoring frame of
a WEB Browser, a negotiation command also works
as a polling command for receiving a reply message
from the mechanical device (PLC). A reply to a mon-
itoring command is performed immediately. The re-
turn time of driving commands is about 30ms.
Furthermore, submission of a driving command
hardly coincides with the renewal of a WEB page
for polling, because of the two independent frame
WEB-BASED INTERACTIVE POSITIONING CONTROL OF AN ELECTRIC FLATCAR VIA WIRELESS NETWORK
325
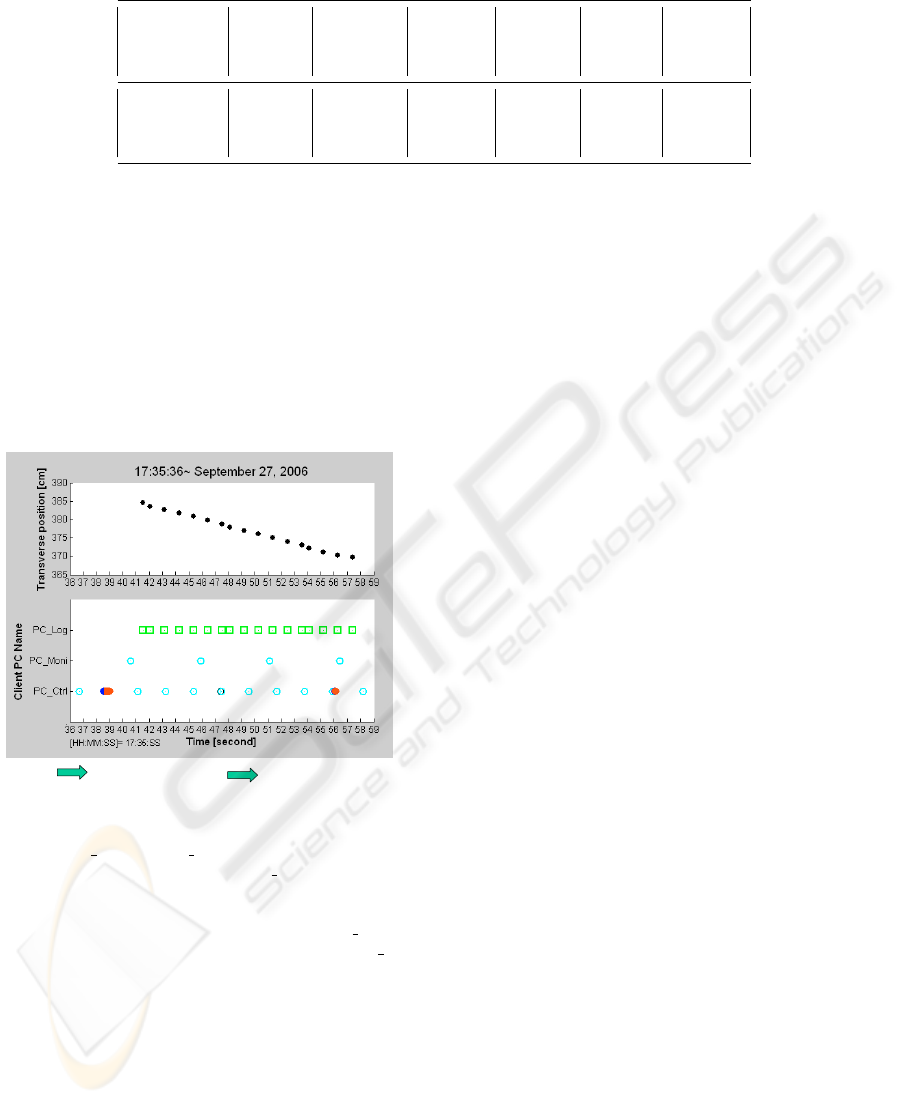
Table 1: Reply times for commands and needed times for position information.
Drive axis Priority $DRIVE First Priority $STOP Last
position position
ms ms sec. ms ms sec.
Transverse 6 32 2.5 6 31 1.6
Elevation 6 28 1.5 7 28 1.0
Rotation 7 30 3.2 7 27 1.2
architecture. Therefore retry of the selection is not
required. Consequently remote control by a WEB
Browser has been working well.
Residual issues are the following:
• A notebook PC lacks solidity.
• It takes longer time in a FORCED STOP oper-
ation on a wireless PC than in an operation by
an EMERGENCY STOP button on an operation
desk.
(a)
(b)
Waiting
$DRIVE
command
$STOP
command
Figure 4: Ordered accesses by three PCs to a main server
PC via LAN. The lower figure (b) shows access timing from
multi PCs. PC
Mon and PC Ctrl use WEB Brower with an
interval time of two or five seconds. PC
Log uses an exclu-
sive application program for logging positioning data with
an interval time of about one second. The upper figure (a)
shows positioning information acquisitioned by PC
Log. In
the lowest row, a transition of motion modes about PC
Ctrl
is shown.
5 CONCLUSION
The development of a remote operation system via a
wireless PC didn’t require editing of a complex se-
quencer program in the electric flatcar, so that this
system starts working well as soon as possible. Using
a function of PRESET DRIVE and a simple commu-
nication protocol that are implemented in the electric
flatcar, the server program for WEB pages that are
available for control and monitoring of a machine has
developed in a sever PC. Usage of a WEB browser
makes possible a flexible constitution of the remote
terminal system. Then it has a merit of a smaller task
to a terminal PC.
This system has been developed on the basis of
two contents such as a WEB direct-access model, and
a controller / multi-monitor system model. It was
clear by the above-described mission that the commu-
nication speed of the electric flatcar is applicable to
the model of WEB direct-access control and monitor-
ing, in the case of attainability of the electric flatcar.
An attachment of a probe is also available for in-
stallation of underwater cameras. The optical calibra-
tion of an underwater observation bench is scheduled
using an electric flatcar. It is hopeful that the wireless
operation on the spot instead of a push button opera-
tion on an operation desk is effective.
REFERENCES
Ishii, K., Abe, K., and Takao, Y. (2006). Positioning control
of the electric flatcar using web browser via wireless
lan. In Abstracts of 2006FY Autumn Annual Meeting.
AMSTEC.
Ishii, K. and Sawada, K. (2005). Network-integrated control
program for a transducer-rotating mechanism to mea-
sure target strength (ts) pattern of squid. In Journal
of Advanced Marine Science and Technology Society.
AMSTEC.
Ishii, K., Sawada, K., and Miyanohana, Y. (1999). Design
of transducer-positioning system scanning around an
aquatic target in a tank. In Collected Papers of FO-
RUM ACUSTICUM BERLIN 99. ASA and DEGA.
Ishii, K., Sawada, K., Takao, Y., Miyanohana, Y., and Oku-
mura, T. (1995). Control system of electric flat-car
equipped above an acoustic tank. In Proceeding of
the Annual Meeting. the Marine Acoustics Society of
Japan.
Ishii, K. and Takao, Y. (2000). Evaluation of transducer-
positioning system scanning around an aquatic target
in a tank. In Abstracts of 2000FY Spring Annual Meet-
ing. Advanced Marine Science and Technology Soci-
ety.
ICINCO 2007 - International Conference on Informatics in Control, Automation and Robotics
326
