
Multiagent Based Simulation Tool for Transportation
and Logistics Decision Support
Janis Grundspenkis and Egons Lavendelis
Riga Technical University
Faculty of Computer Science and Information Technology
Department of Systems Theory and Design
1/4 Meza Street, Riga
Latvia LV-1048
Abstract. A transportation and logistics domain belongs to complex problems
domains because there are many geographically distributed companies who
may enter or leave the system at any time. Analysis of the great number of
publications reveals that although traditional mathematical modelling and
simulation techniques still dominate, new approaches start to appear. Agent
technologies and multiagent systems emerge into transportation and logistics
domain only recently. The paper proposes the developed multiagent based
simulation tool for decision support in transportation and logistics domain. The
multiagent system consists from clients’ agents and logistics companies agents
which may participate in four types of auctions, namely, English auction, Dutch
auction, First-price sealed-bid auction and Vickrey auction. A client is an
auctioneer who is making decision about the best offer of delivering goods. The
simulation tool is implemented using Borland C++ Builder and MS Access
database.
1 Introduction
A transportation and logistics domain with many involved companies that are
geographically distributed belongs to complex problem domains. The logistics
domain is dynamic where logistics goals, companies’ capabilities and beliefs are
continually changing throughout the planning process. Moreover the logistics domain
is an open domain where organizations may enter or leave the system at any time [1].
Different methods and techniques are used for problem solving in transportation and
logistics. Analyses of the great number of publications reveals that traditional
mathematical modelling and simulation techniques still dominate for searching of
solutions, but new approaches start to appear, such as web- and knowledge based
systems, intelligent agents for distributed and mobile solutions., etc. [2].
Agent technologies start to penetrate into transportation and logistics domain only
recently. Intelligent agents represent organizations within the logistics domain, and
model their logistics functions, processes, expertise, and interactions with other
organizations. Some agents simulate users involved in traffic; others are means of
transport (trucks, trains, planes, ships), or elements of the traffic infrastructure [3].
Multiagent systems offer such useful features as parallelism, robustness and
Grundspenkis J. and Lavendelis E. (2006).
Multiagent Based Simulation Tool for Transportation and Logistics Decision Support.
In Proceedings of the 3rd International Workshop on Computer Supported Activity Coordination, pages 45-54
DOI: 10.5220/0002479000450054
Copyright
c
SciTePress

scalability. Multiagent based approaches are well suited for domains, which require
the integration and interaction of multiple sources of knowledge, the resolution of
interest and goal conflicts or time bound processing of data [4]. Applications of
intelligent systems in transportation and logistics cover such problems as multiagent
simulation for traffic modelling, decision support systems for letter transportation,
logistics planning, sea freight transportation, vehicle dispatching, railway
transportation scheduling, and others [5], [6], [2]. Several successful projects have
been described, for example, TELETRUCK system [7] and DIAL system [8]. During
a design of agent-based systems for transport a new agent technology has been
introduced – a holonic agent or holon. [9]. Two generic meta-types of agents, namely,
management and service agents have been introduced in the logistics domain [10].
At the same time investigations of different operation modes in multiagent systems
in the context of multimodal transportation and logistics problems are not intensive
enough. The paper deals with the development of the prototype of multiagent based
simulation tool. The multiagent system consists from clients’ agents and logistic
companies agents which allow simulating four different types of auctions. At the end
of the auction the client can make a deal with the winning agent.
2 Example of the Multimodal Transportation Route
One very popular way how to deliver goods from Asia to Europe is by using the
following supply chain: “Asian Deep Sea Port ↔ Western Europe Deep Sea Port ↔
Baltic and Mediterranean feeder ports ↔ European Costumers”. In this paper we
suppose that at first goods are transported to Shanghai Port by railway, then by deep
sea shipping lines to Hamburg, by feeder shipping lines to Mediterranean and Baltic
feeder ports, and finally by trains to clients. This multimodal transportation chain is
shown in Figure 1, and it is used as an example to show basic concepts of multiagent
systems for selecting the best company and route for transporting goods.
In this paper we discuss the possibility to simulate cooperation between all
interested parties. When client wants some good to be delivered, he does not go
directly to shipping and/or railway companies, but goes to logistic companies, who
contact their partner carriers. This process involves a lot of competitors and is time
and money consuming if done by humans. The proposed multiagent based simulation
tool is an attempt to automate this process and to support decision about optimal
solution.
3 The Architecture of Multi-Agent System
The purpose of building the multi-agent system is to provide more easy deal making
between clients and logistic companies.
The multiagent system is built as follows: each client has his agent and each
logistic company has its agent, too. Clients make deals with logistic companies using
auctions, where client is an auctioneer and logistic companies are bidders.
46
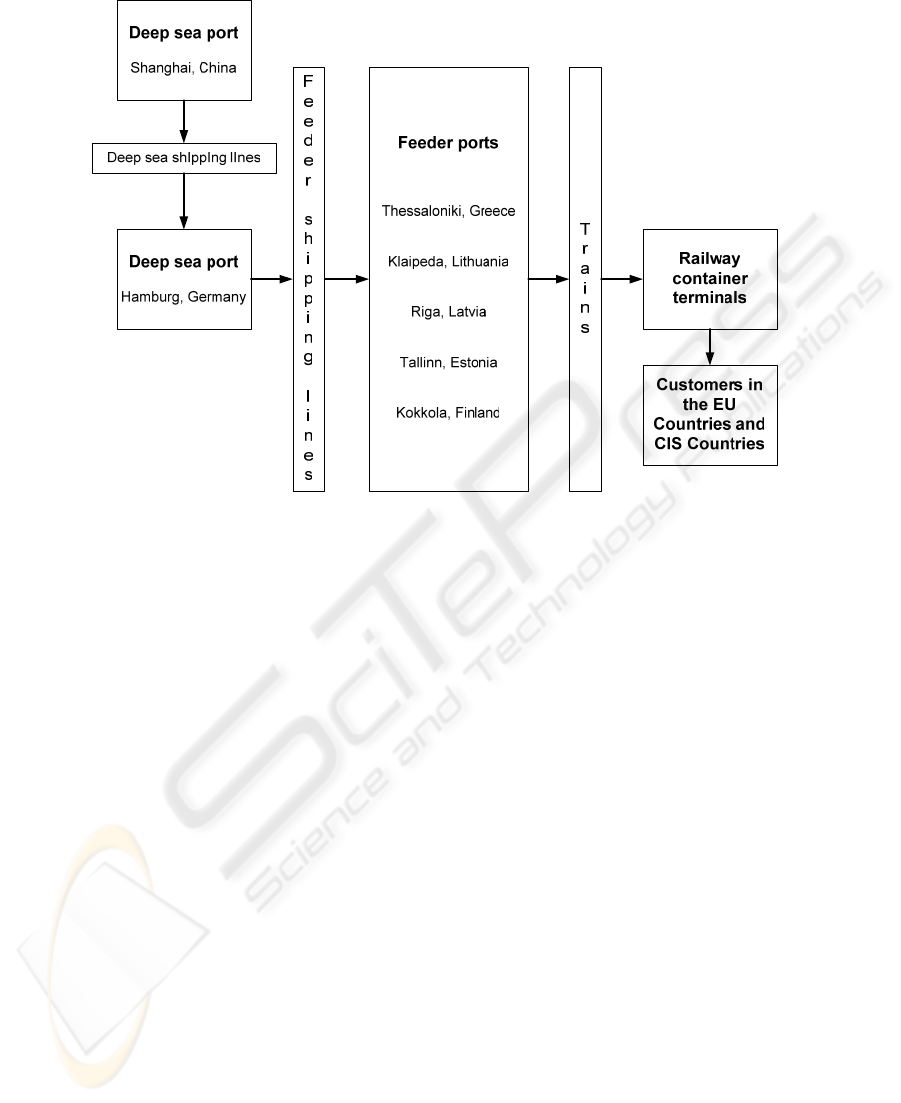
Fig. 1. Supply chain: “Asian Deep Sea Port (Shanghai) ↔ Western Europe Deep Sea Port
(Hamburg) ↔ Baltic and Mediterranean feeder ports ↔ European Costumers”.
Clients’ agents do not cooperate with each other. Two auctions organized by
different agents also do not affect each other. This allows to simplify systems
architecture by viewing system with only one client (and his agent) and many logistic
companies (and their agents). Figure 2 shows business links between all actors and
also shows which of them have agents.
Client’s agent gets all necessary parameters from client and makes an auction. In
the developed tool the following parameters are used:
• Starting point and destination,
• Auction type,
• Starting price per unit (for some auction types),
• Other parameters for auctions and their weight coefficients (if available).
Each logistics company’s agent has knowledge base containing all carriers his
owner (logistic company) collaborates with and all information about routes which
they operate. Similarly, the knowledge base contains all information about terminals
with which logistic company collaborates.
47
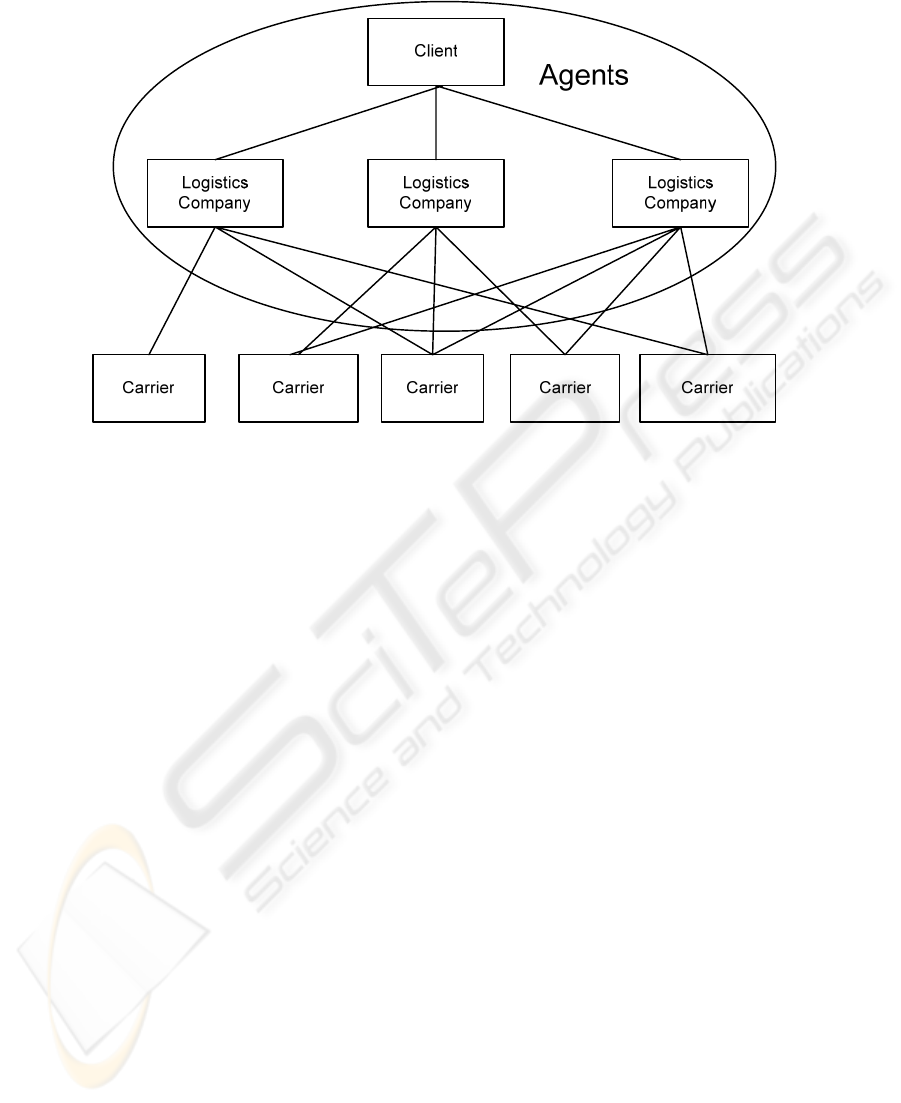
Fig. 2. Business links between all actors and their agents.
After receiving an offer to participate in auction, the first thing that agent has to do
is to calculate his private evaluation. To do it, agent has to find all possible paths how
to transport containers from starting point to destination. The transportation system is
represented by a graph, where nodes are terminals and edges are possible routes. Each
edge and also each node have weights. Weights correspond to transportation costs per
transportation unit and costs per unit of goods (containers) that are kept in terminals.
In this case it is easy to use some very simple path finding algorithm (for example,
depth search) to find all possible paths. The minimal paths costs plus some percents
for minimal companies’ profit is agent’s private valuation.
As mentioned before, a client is an auctioneer and logistic companies are bidders.
There is one difference from traditional auction interpretation: traditionally auctioneer
maximizes price, but bidders – minimize, but if we are auctioning the possibility to
sell something (in this case carrying service), we (auctioneer) need to minimize the
price, but bidder – to maximize. It is worth to stress that there are not critical changes
in basic auction protocols: only the price changes to opposite direction.
Agent knowledge bases contain their strategies in different types of auctions. There
are four types of auctions. Auctioneer starts an auction by sending all auction
parameters (listed above) to bidders. There are four types of auctions [11] that are
implemented in the proposed simulation tool:
• English auctions (the most commonly known type of auction) that are first-price,
open cry, ascending auctions. The auctioneer starts off by suggesting a reservation
price. If no agent (bidder) is willing to bid more than the reservation price, the
good is allocated to auctioneer for this amount. In other case, bids are then invited
from agents who must bid more than current highest bid, and then the winner is
agent who has made the current highest bid. In English auctions dominant strategy
48

is to bid a small amount more than the current price, if it is less than private
valuation.
• Dutch auctions are open-cry descending auctions. The auctioneer starts out by
offering some artificially high price. The auctioneer then continually lower the
current price by some small value until some agent makes a bid and wins the
auction. There is no dominant strategy for Dutch auctions in general.
• First-price sealed-bid auction is an example of one shot auction. There is a single
round in which bidders submit to the auctioneer a bid. The winner is an agent that
made the highest bid. Agents use the dominant strategy – to bid a bit less than true
valuation.
• Vickrey auctions are the most unusual and perhaps counterintuitive of all
considered auction types because these auctions are second price sealed-bid
auctions. There is a single negotiation round, during which each bidder submits a
single bid; bidders do not get to see the bids made by other agents. The winner is
an agent who made the highest bid, however he pays the price of the second
highest bid. Agents use the dominant strategy – to bid his true valuation. This is the
main advantage of this protocol for the auctioneer .
After receiving auction’s parameters each agent calculates his private valuation.
Then, if his strategy says him to bid, he bids according to his strategy. In the
developed simulation tool all agents have identical strategies which are the dominant
ones in corresponding auctions. In real life these strategies can differ. After receiving
each bid the auctioneer informs other bidders about this bid (if auction is open-cry).
At the end of auction client can make a deal with the winning agent.
4 Implemented Simulation Tool
All four types of auctions are used in the simulation tool which is implemented using
Borland C++ Builder and MS Access database. The simulation tool only shows the
mechanism how these auctions can be carried out. At the moment there are big
differences from real deal making system. First, our system runs on one computer and
it is not possible to connect to it through Internet. A real system should have one
server and many client’s and many logistic company’s computers each having one
agent. Second, our system has common database for agents. Agents get from it only
their knowledge defined by relationships in this database. At the same time, it is
needed to stress that these differences are only technical realization details, and they
do not affect the main algorithms and ideas. That is only a matter of programming
client server applications to implement a real system.
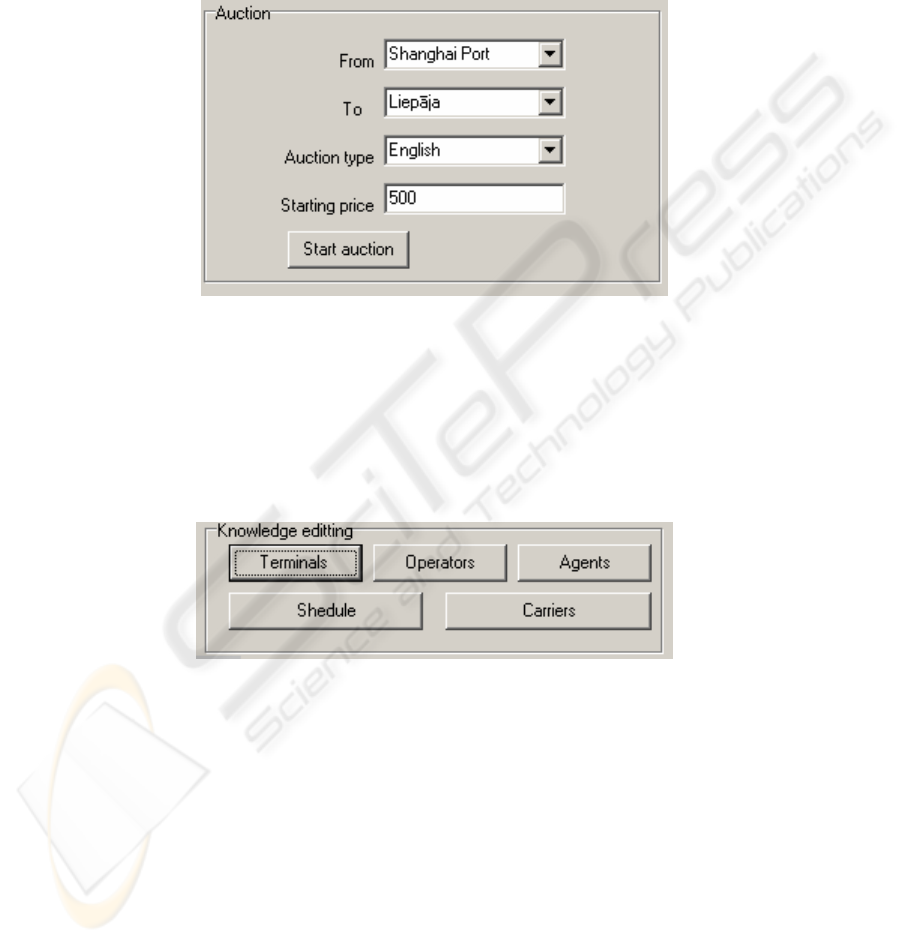
Interface of the simulation tool consists from three main parts:
• Auction parameters input part. This part allows client to input routes and auctions
parameters (see Figure 3.)
• Knowledge editing part consists of buttons in main window (see Figure 4) and
simple database editing forms. These forms allow user to edit agent list, their
attributes and all agent knowledge bases. Although this program is developed for
container flow optimisation in one special supply chain, it is very simple to use it
for any other routes not only in Europe and China but worldwide, because it is
possible to add and remove terminals at any place on the map.
49
• Bid and winner information output part. This part consists of Europe’s and China’s
maps, where during the auction all terminals and also routs are drawn. There is also
result table, where detailed information about price, path and time is printed.
Whole window with first bid for route “Shanghai – Liepaja” using English auction
and starting price 500 is shown in Figure 5.
Fig. 3. Auction parameters input part .
The first bid of auction in route “Shanghai – Liepaja” is shown in Figure 5 but it is
not the last one. This is English auction and the dominant strategy for this auction
type is to bid just a bit more than current price. So there are quite a big number of bids
even between two agents. The winning bid contains much less price than starting
price and also much more reasonable path is chosen (result table is shown in Figure
6).
Fig. 4. Knowledge editing part. (All simple database editing forms are not shown).
But there is an open question: which auction will give the lowest price for us? In
case of risk-neutral bidders it is not important which protocol to choose. But for risk-
averse bidders Dutch and First-price sealed-bid auctions are the best for auctioneer.
Risk-averse auctioneers, however, do better with Vickrey or English auctions [11],
50
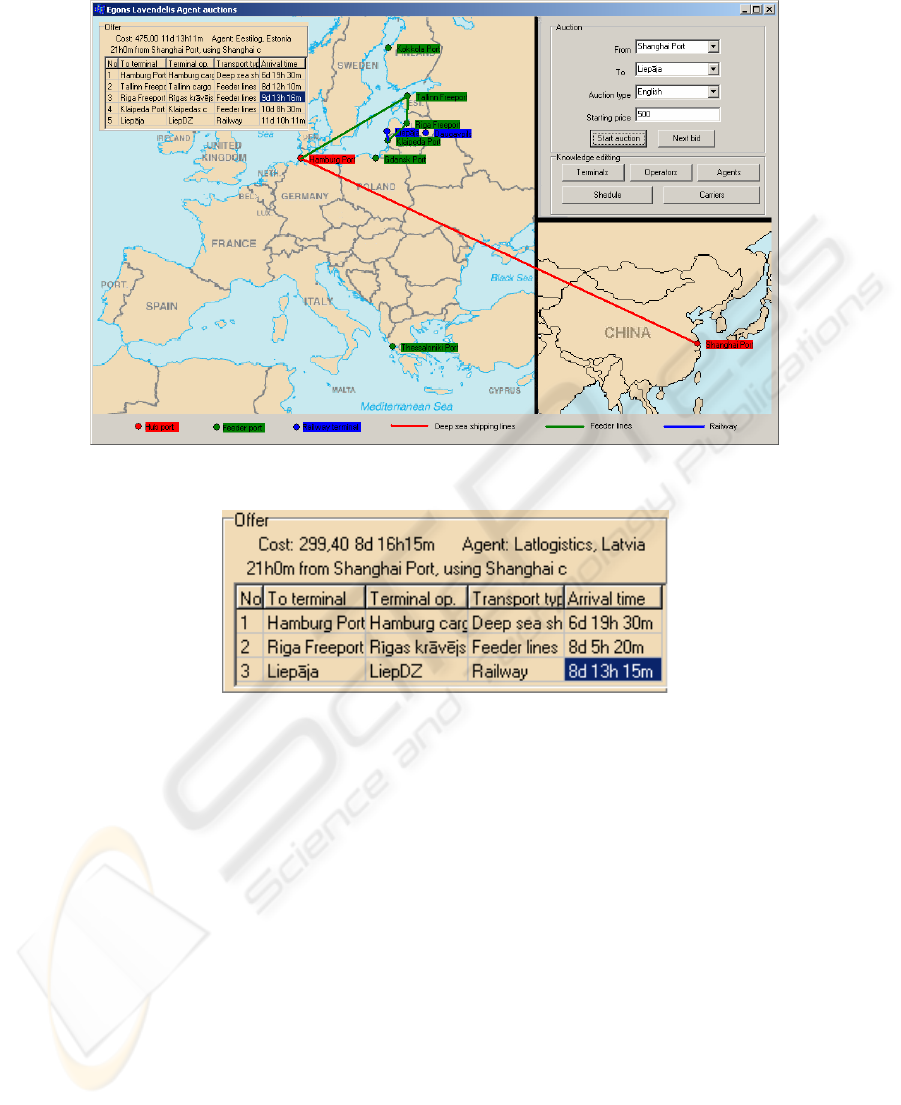
Fig. 5. Whole window with first bid for route “Shanghai - Liepāja”.
Fig. 6. Winning offer in English auction for route “Shanghai-Liepāja” and starting price 500.
Results of experiments carried out with the simulation tool shows that there is no
big influence of auction protocols on price (price did not vary more than 10% in any
case) because the agents were risk-neutral. In real world it seems that large number of
small companies are risk-averse, because they perceive every loss very painfully,
while big companies may take a risk and that should be taken into consideration when
choosing auction protocol.
5 Cooperation between Logistic Companies and Carriers
In previous chapters we discuss only automation of cooperation between client and
logistic companies, but cooperation between logistic companies and carriers was only
mentioned. It is possible to automate this communication, too. In this case all actors
shown in Figure 2 have agents. Though automation of communication between carrier
51
agents and logistic company agents can be done using auctions, we must take into
consideration that these auctions should have more than one winner because each
carrier cooperates with more than one logistic company and vice versa (it can be
organized also using some other negotiation protocols).
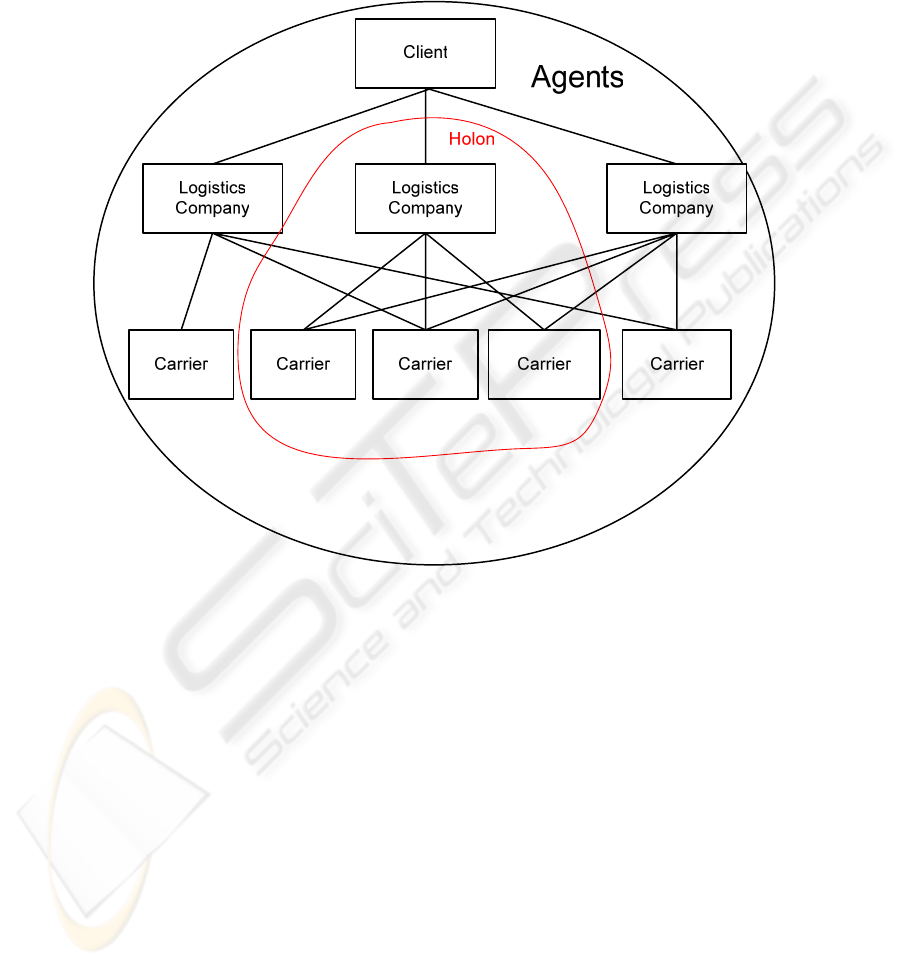
Fig. 7. Multi-multi-agent system and holons.
In this case the proposed multi-agent system is transformed into a multi-multi-
agent (or holonic multiagent) system, because for clients a logistic company and
carriers with which it cooperates is one whole object (holon) represented by one agent
– a logistic company’s agent. There are 3 holons, but only one is marked in Figure 7
(other holons contain other 2 logistic companies with their carriers) which illustrates
the same situation as in Figure 2; only carriers have their agents and the logistic
companies and carriers with which they cooperate make holons.
In fact, it is possible to continue by automating also carrier company
communication with ships, trains and trucks, but in this situation auctions definitely
will not be needed, because these are units of the same company, and they just need to
be coordinated but no deal making is needed. Thus, there is simple hierarchy between
carrier’s main agent and its ships’ agents.
52

6 Conclusion
The developed simulation tool demonstrates that it is quite simple to implement a
multi-agent system for automation of communication between clients and logistics
companies. Also it is possible to make deals between carriers and logistic companies
automatically. The price may be determined using different types of auctions. That
minimizes efforts for finding the best way to deliver some goods: the client instead of
contacting all known logistic companies could just enter his wills and in few moments
get deal with one company. Logistic companies, in their turn, need not to make
negotiations with all clients, they can just announce their company’s politics to
corresponding agents and these agents will make deals with possible clients.
Simulation results show that if both auctioneer and bidders are risk-neutral, there is
no big difference, which auction protocol is used. In real situation we must take into
consideration that small companies are risk-averse, while big companies can afford a
risk. As a consequence, we must choose the appropriate auction protocol.
It is possible to include in this system also carriers and automate their
communication with logistic companies. This is one of the directions of future work.
Then it will be a multi-multi-agent system and each logistic company and carriers
with which it cooperates make a holon. For client this holon is represented by a
logistic companies agent.
Multiagent system is advanced and quite cheap solution for communication
problem solving between logistic company and their clients, and also carriers.
The future work is to make our systems more realistic. There are no big difficulties
to implement a real deal making system. That is only a matter of programming of
client server mechanisms, because all complicated algorithms are already
implemented in the developed simulation tool. It is also possible to make these
auctions a legal instrument by using electronic signatures. In this case all deals should
be made online and a lot of human resources should be saved.
References
1. Perugini, D. et al. Agents in Logistics Planning – Experiences with the Coalition Agents
Experiment Project. In: Proceedings of Workshop at the Second International Joint
Conference on Autonomous Agents and Multiagent Systems (AAMAS 2003), Melbourne,
Australia, July (2003)
2. Graudina V., Grundspenkis J., Technologies and Multi-Agent System Architectures for
Transportation and Logistics Support: An Overview. In: Proceedings of the International
Conference on Computer Systems and Technologies – CompSysTech’05, Varna, Bulgaria,
June 16, 17, 2005, The Bulgarian Chapter of ACM, Bulgaria (2005)
3. Zhu, L. M., Bos, A.: Agent-Based Design of Intermodal Freight Transportation Systems.
NECTAR Conference, Deeft, The Netherlands (1999)
4. Weiss, G.: Adaptation in Learning in Multi-Agent Systems: Some Remarks and a
Bibliography. In: Proceedings of the IJCAI ’95 Workshop on Adaptation and Learning in
Multi-Agent Systems. LNAI 1042, Springer (1995)
5. Gambardella, L. M. et al.: The Use of Simulation in the Socio-Economical Evaluation of
the Intermodal Terminal. HMS 2000, Maritime & Industrial Logistics Modelling and
Simulation, Portofino, Italy (2000) (available at www.idsia.ch/~luca/hms2000.pdf)
53

6. Funk P., Vierke, G., Bürckert H.-J.: Distributed Intermodal Transportation Planninng In:
Multiagentensysteme in der Transportlogistic (1999) (available at www.agki.tzi.de/ki99-
mas/funk_etal_99.pdf)
7. Bürckert H.-J., Fischer K., Vierke, G: Holonic Fleet Schedulling with TELETRUCK. In:
Proceedings of the Second International Conference on Computing Antipatory Systems.
(CASYS’98) (1998)
8. Satapathy, G., Kumara, S., R., T., Moore, L. M.: Distributed Intelligent Agents for
Logistics (DIAL). Journal of Expert Systems Applications and Practice (1998)
9. Bürckert H.-J., Fischer K., Vierke, G: Holonic Fleet Schedulling with TELETRUCK. In:
Proceedings of the Second International Conference on Computing Antipatory Systems.
(CASYS’98) (1999)
10. Henoch, J., Ulrich, H.: Agent-Based Management Systems in Logistics. In: 14
th
European
Conference on Artificial Intelligence Workshop Notes, Agent Technologies and their
Application Scenarios in Logistics (2000)
11. Wooldbridge, M.: An introduction to Multiagent Systems. John Wiley & Sons, Baffins
Lane, Chichester, England (2002)
12. Fischer, K., Schillo, M., Siekmann, J.: Holonic Multiagent Systems: A Foundation for the
Organization of Multiagent Systems (2003)
54
