
A DISTRIBUTED ALGORITHM FOR COALITION FORMATION IN
LINEAR PRODUCTION DOMAIN
Chattrakul Sombattheera
Decision Systems Lab
School of Information Technology and Computer Science University of Wollongong, NSW, Australia
Aditya Ghose
Decision Systems Lab
School of Information Technology and Computer Science University of Wollongong, NSW, Australia
Keywords:
Linear production, coalition formation, coalition structure
Abstract:
Coalition formation is an important area of research in multi-agent systems. The large number of agents can
make coalition formation become a complex process. The problem of dealing with large number of agents
during coalition formation has received little attention in the literature. Previous studies assume that each
coalition value is known a priori. This assumption is impractical in realworld settings. Furthermore, the
problem of finding coalition values become intractable for even a relatively small number of agents. This
work studies coalition formation among fully cooperative agents in linear production domain, where each
coalition value is not known a priori. The common goal of the agents is to maximize the system’s profit. We
propose a distributed algorithm that allow agents to i) deliberate profitable coalitions, and ii) compute optimal
coalition structure. We show that our algorithm outperforms exhaustive search when generating profitable
coalitions, which can be used to achieve optimal coalition structure that yields the system’s maximal profit.
1 INTRODUCTION
Coalition formation is an important area of research in
multi-agent systems. It studies the process that leads
to cooperation among agents. The process involves i)
negotiation in order to exchange information among
agents, and ii) deliberation in order to decide with
which agents should they cooperate. Coalition forma-
tion research has its roots in cooperative game theory
where the focus is on what coalitions would form and
what the payoffs for agents are. On the other hand, re-
searchers in multi-agent systems are concerned with
the complexity of coalition formation and in partic-
ular, settings where the number of agents involved
is very large. The large number of agents can make
coalition formation become a complex process, i.e.,
there is a large number of messages sent across while
negotiating and there is a large number of possible
coalitions to be considered while deliberating.
The problem of dealing with large number of
agents during coalition formation has received lit-
tle attention in the literature. A small of number of
studies have considered the complexity of delibera-
tion (Sandholm et al., 1999). These studies, as in
game theory, assume that a coalition value is associ-
ated with each coalition. Then they focus on how the
optimal coalition structure can be achieved in a timely
fashion. The complexity of finding coalition structure
using thourough search is exponetial time (Sandholm
et al., 1999).
On the other hand, this work considers coalition
formation where coalition values are not known a pri-
ori. This kind of setting is common in real world
environment. Examples include internal/external col-
laboration in third party logistics providers, coopera-
tion among nodes in grid computing and cooperation
among service providers in composite web service en-
vironment. These real world scenarios make coali-
tion formation highly complex because agents have to
i)compute coalition values, and ii) compute the opti-
mal coalition structure. Given m agents in a coalition
formation process, the number of possible coalitions
is 2
m
, which is also the number of coalition values
to be computed. The process of computing coalition
values is complex, as is the process of deliberation.
The problem becomes intractable even for a relatively
small values of m.
Our goal in this research is to deal with this com-
plexity. We modify Owen’s linear production game
where agents have to agree to pool their resources to-
gether in order to produce goods. The original work
assumes a superadditive environment, where agents
17
Sombattheera C. and Ghose A. (2006).
A DISTRIBUTED ALGORITHM FOR COALITION FORMATION IN LINEAR PRODUCTION DOMAIN.
In Proceedings of the Eighth International Conference on Enterprise Information Systems - AIDSS, pages 17-22
DOI: 10.5220/0002445000170022
Copyright
c
SciTePress

can simply form the grand coalition. Such an assump-
tion is impractical in the real world. Since the cost of
cooperation has to be taken into account while nego-
tiating to form coalitions.
The outline of this paper is as follows. We in-
troduce our setting. We describe how our algorithm
works and discuss both in deliberating and forming
coalitions. Then we discuss about the experiment
and show empirical results. We discuss related work
which followed by conclusion and future work.
2 COALITION FRAMEWORK
2.1 Linear Production Domain
Linear production games (Owen, 1975) are those in
which agents are given resources and try to pool re-
sources to produce goods in order to maximize the
system’s profit. Owen (Owen, 1975) studied lin-
ear production games in superadditive environment.
Here, we consider linear production games in non-
superadditive environments. We are given a set of
agents, A = {a
1
,a
2
,...,a
m
}, whose goals are to
maximize the system’s profit. We are also given a set
of resources R = {r
1
,r
2
...,r
n
} and a set of goods
G = {g
1
,g
2
,...,g
o
}. Resources themselves are not
valuable but they can be used to produce goods, which
are valuable to agents. Let L =[α
ij
]
n×o
, where
α
ij
∈ Z
+
, be the matrix that specifies the units of
each resource r
i
∈ R required to produce a unit of
the good g
j
∈ G. Such a matrix is called a lin-
ear technology matrix (Owen, 1975). The price of
each unit of goods produced is specified by the vec-
tor P =[p
j
]
1×o
. Each agent a
k
∈ A is given a re-
source bundle b
k
=[b
k
i
]
n×1
. In this setting, some
agents would have the incentive to cooperate, e.g., if
they cannot produce a certain good using only the re-
sources at their disposal. Hence agents have to co-
operate, i.e. form coalitions, in order to create value
from their resources. Let S ⊆ A be a coalition. It will
have a total of
b
S
i
=
k∈S
b
k
i
of the i
th
resource. The members of coalition S
can use all these resources to produce any vector
x = x
1
,x
2
,...,x
o
of goods that satisfies the fol-
lowing constraints:
α
11
x
1
+ α
12
x
2
+ ...+ α
1o
x
o
≤ b
S
1
,
α
21
x
1
+ α
22
x
2
+ ...+ α
2o
x
o
≤ b
S
2
,
.
.
.
.
.
.
.
.
.,
α
n1
x
1
+ α
n2
x
2
+ ...+ α
no
x
o
≤ b
S
n
and
x
1
,x
2
,...,x
o
≥ 0.
We assume that agents have to pool their resources
together at a coalition member’s location to produce
these goods. Thus agents’ cooperation incurs some
costs, e.g., transportation cost, etc. The coopera-
tion cost among agents is specified by the matrix
C =[c
kl
]
m×m
, which assigns a cooperation cost be-
tween each pair (a
k
,a
l
) of agents such that
c
kl
∈
Z
+
if k = l
{0} if k = l
We assume that all of the resources of agents are
pooled at one location, which can be the location of
any agent in the coalition. A singleton coalition yields
cooperation cost of 0. For a coalition of size two,
S = {a
1
,a
2
}, pooling coalition resources at any of
the two sites yield the same cost for the coalition (i.e.
the cooperation cost matrix is symmetric). The to-
tal cost for cooperation incurred by a coalition will
be taken to be the sum of the pairwise cooperation
costs between the agent at whose location coalition
resources are pooled, and the other members of coali-
tion. For a coalition of size three or larger, there is at
least one agent, a
k
, such that
m
k
=1
c
kk
≤
m
l
=1
c
ll
for all a
l
∈ S. We shall call a coalition member a
k
who yields the minimal cooperation cost for the coali-
tion a coalition center.
Agents in the coalition S have to find a vector x
to maximize the revenue accruing to a coalition. Let
P
S
=
o
l=1
p
l
x
l
be the maximal revenue the coali-
tion can generate. Let C
S
=
l∈S
c
kl
be the min-
imal cooperation cost for the coalition (obtained by
selecting the optimal coalition center). Obviously,
the ultimate objective of agents in the coalition is to
maximize profit, i.e., the coalition value υ
S
, where
υ
S
= P
S
− C
S
.
The linear inequalities referred to above, together
with this objective function constitutes a linear pro-
gramming problem. We shall call the solution, the
vector x
1
,x
2
,...,x
o
that represents the optimal
quantities of goods g
1
,g
2
,...,g
o
optimal product
mix.
2.2 Optimal Coalition Structure
Coalition formation problems can also be considered
as a set partitioning problem. The set of all agents will
be partitioned into mutually disjoint and proper sub-
sets. Each instance of a partition is known as a coali-
tion structure(CS) (Dang and Jennings, 2004; Sand-
holm et al., 1999; Kahan and Rapoport, 1984), while
each subset is known as a coalition S. The value of
each coalition structure
V (CS)=
S∈CS
υ
S
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
18

indicates the system’ utility yielded by that partition-
ing. The goal of cooperative agents in coalition for-
mation (Sandholm et al., 1999; Dang and Jennings,
2004) is to maximize the system’s utility.
Computing the optimal coalition structure in a non-
superadditive environment is non-trivial (Sandholm
et al., 1999). Previous studies (Sandholm et al.,
1999; Dang and Jennings, 2004) assumed the exis-
tence of a characteristic function and considered al-
gorithms for computing the optiamal coalition struc-
ture. Such an assumption is impractical in the real
world—each coalition value may not be known a pri-
ori. Thus agents have to compute all coalition values
first. Given a set of m agents, there are 2
m
possible
subsets, hence the complexity of computing all coali-
tion structures is substantially worse.
Here, we consider a distributed algorithm that al-
lows agents to compute coalition values and approach
the optimal coalition structure as they proceed. Each
agent has to do to two tasks: i) Delibarating: de-
liberate over what coalitions it might form by incre-
mentally improving the initial set of coalitions, and
ii) Forming coalitions: exchange information to form
coalitions such that those coalitions yield maximal
profit to the system. The sets of such coalitions are
the optimal coalition structures. The main goal of the
algorithm is to reduce search space for finding the op-
timal coalition structure. This can be achieved by re-
ducing the number of coalitions to be considered. In
our setting, the optimal coalition structure must yeild
a profit, a non-nagative utility, to the system. In the
worst case, the system’s profit is 0—each agent is a
singleton coalition and cannot produce anything at all.
3 DISTRIBUTED ALGORITHM
FOR COALITION FORMATION
3.1 Deliberating Process
In the following, we will indentify a coalition by the
indentifier of its coalition centre agent. Thus the
coalition S
k
will have agent a
k
as its centre. Hence b
S
represents the resource vector of S
k
. The reasoning
described below is conducted by the coalition centre
agent for each coalition. Given a coalition S
k
, let G
k
refer to the set of goods whose resource requirements
are fully or partially satsified by b
S
, the resources
available in S
k
(excluding goods whose resource re-
quirement might be trivially satisfied because these
are 0). For each good g
j
∈ G
k
, the coalition centre
agent a
k
ranks agents not currently in its coalition on
a per good basis. For each resource r
i
of good g
j
,
agent a
k
ranks non-member agents by computing for
each a
l
/∈ S
k
, whose b
l
i
> 0, the value π
j
i
—its pro-
g
j
?
α
1j
?
-
a
r
1
1st
-
a
r
1
2nd
-
a
r
1
3rd
α
2j
-
a
r
2
1st
-
a
r
2
2nd
-
a
r
2
3rd
Figure 1: Agents are ranked by their potential profit per
each resource of a good.
portional contribution to the profit of the good (using
its fraction of the resource requirements for that good
provided by the a
l
) minus the (pair-wise) collabora-
tion cost between a
l
and a
k
, i.e.,
π
j
i
=
b
l
i
α
ij
p
j
− c
kl
.
The agent a
k
uses this proportional contribution π
j
i
to
construct a binary tree for each g
j
. Figure 1 illustrates
the tree T
j
of g
j
. The only child of the root g
j
is the
first resource α
1j
, whose left child is the second re-
source α
2j
, and so on. For each α
ij
, its right child is
either i) null if α
i
j
=0,orii) the agent a
r
i
1st
, whose
pi
j
i
value is the greatest. The right child of a
r
i
1st
is
the agent a
r
i
2nd
, whose π
j
i
value is the second greatest,
and so on. Every time a
k
wants to produce additional
units of g
j
, it traverses the tree down to the appropri-
ate resource r
i
and add more agents into its coalition
based on b
S
.
The agent a
k
uses b
S
to determine additional re-
sources needed to produce additional units of a good
g
j
. For each g
j
∈ G
k
and resource r
i
,
β
j
i
= I(α
ij
) − b
S
i
,
where I ∈ Z
+
is the smallest integer such that
β
j
i
> 0, represents the amount of r
i
that coalition
S
k
lacks to produce good g
j
, provided the amount is
non-nagative (β =0otherwise). The indicative vec-
tor, β
j
=[β
j
i
]
1×n
, represents un-met requirements
for each resource r
i
of good g
j
.
The agent a
k
uses the indicative vector β
j
to help
collecting additional coalition members into its coali-
tion. If the agent a
k
wants to produce an additional
unit of g
j
, it identifies the resource that is needed the
most, β
j
i
∗
= max
n
i=1
(b
j
i
), from the indicative vec-
tor. It locates the node β
j
i
∗
in T
g
j
and collects the
next available agent a
i
∗
l
into the coalition. The total
resources of the coalition b
S
is updated. Each β
j
i
of
indicative vector will be subtracted by it correspond-
ing b
l
i
. The agent a
k
keeps adding more agents into its
coalition until there are enough resources to produce
A DISTRIBUTED ALGORITHM FOR COALITION FORMATION IN LINEAR PRODUCTION DOMAIN
19

an additional unit of g
j
, i.e., β
j
i
> 0 ∀i. This algo-
rithm to collect additional agents into the coalition is
shown in 1.
Algorithm 1 Select additional agents
Require: the present coalition S
Require: the focused good g
initialize additional agents S
= ∅
get the coalition’s resource b
S
get the indicative vector β
g
identify the most needed resource r
i
∗
while r
i
∗
> 0 do
locate next available agent a
r
j
l
if a
r
j
l
¡0 then
break
end if
set S
= S
∪ a
r
j
l
for all β
j
i
do
set β
j
i
= β
j
i
− b
l
i
end for
identify the most needed resource r
i
∗
end while
return S
So far, the agent a
k
knows that if it wants to pro-
duce at least an additional unit of g
j
, it needs to add
agents from S
into its S
k
. The agent a
k
create a trial
coalition by merging S
into S. Since each new agent
may posses other resources not required for produc-
ing g
j
, the trial coalitions may find a better solution
for producing goods. Hence the profits υ of trial coali-
tions vary. The additional agents S∗ are those S
that
provide the highest additional profit υ
∗
and are kept as
the basis for further growing coalition, S
∗
. The subal-
gorithm for selecting the most profitable members is
shown in algorithm 2.
Algorithm 2 Select the most profitable members
Require: A coalition S
Require: ranking trees T
G
set highest profit υ
∗
=0
set most profitable members S
∗
= null
for all g
j
∈ G do
if S is not capable of producing g
j
then
continue
end if
get additional agents S
set trial coalition S
j
= S ∪ S
j
compute trial coalition’s profit υ
S
j
if υ
S
j
>υ
S
∗
then
set S
∗
= S
j
end if
end for
return S
∗
At the begining of deliberating, the agent a
k
con-
siders itself a singleton coalition. It create the ranking
tree T
G
of all agent for each good. Then it keeps
adding the most profitable agents, S
∗
, into the coali-
tion. This will keep the coalition’s marginal profit
grows while the size of the coalition is growing. It
also reduces the number of coalitions each agent a
k
has to maintain. The new coalition S will be added to
a list L
+
of profitable coalitions. This process repeats
until there are no more agents left or it cannot find any
more profitable agents. The main algorithm is shown
in algorithm 3.
Algorithm 3 Main
set L
+
= ∅
create a singleton coalition S = {a
k
}
set A
= A −{a
k
}
create ranking trees T
G
for all goods
select the most profitable members S
∗
while A
= ∅ and S
∗
= ∅ do
set A
= A
− S
∗
set S = S ∪ S
∗
set L
+
= L
+
∪ S
select the most profitable members S
∗
end while
3.2 Coalition Formation Algorithm
Once each agent finishes its deliberation, it ranks all
of its coalitions by profit. Let S
−
be a non-profitable
coalition, whose value υ
S
−
≤ 0. and S
+
be a prof-
itable coalition, whose value υ
S
+
> 0.
Lemma 1 Any S
−
coalition can be replaced by a set
of its members’ singleton coalitions, whose υ
a
k∈S
≥
0, such that the coalition structure’s value will not be
decreased.
Therefore, all non-profitable coalitions can be ig-
nored. Each agent will prune all of the non-profitable
coalitions, if there is any. The remaining coalitions
are profitable. In fact, our algorithm in delibera-
tion process can simply prevent this happening using
its tree T
G
. It always generate profitable coalitions.
Obviously, each singleton coalition is non-negative.
Hence, non-profitable coalitions must not exist in the
coalition structure. Given that the deliberation algo-
rithm generates all profitable coalitions among agents
inclusively, agents can i) exchange information about
coalitions generated and their singleton coalitions,
and ii) decide form coalitions that yield the optimal
coalition structure value.
Proposition 1 The optimal coalition structure can
be constructed by profitable coalitions generated by
agents and their singleton coalitions.
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
20
Next step each agent sends information about coali-
tions it has generated to each other. For each coali-
tion size, each agent can further reduce the number
of coalitions it has by deleting non-centred coalitions
and those whose values are non-maximal. Up to this
point, the remaining coalitions are likely to be in
the coalition structure. Agents exchange information
again and compute optimal coalition structure using
existing algorithm, e.g., (Sandholm et al., 1999). The
algorithm is shown below.
1. Each agent a
k
deletes non-profitable coalitions
from its list
2. Agent a
k
sends its list of profitable coalitions to
each coalition member
3. For each coalition size, agent a
k
deletes all coali-
tions that their centre are not the agent itself and
those that do not yield the maximal value
4. Each agent sends the remaining coalitions to each
member
5. Each agent compute the optimal coalition structure
using existing algorithm ( (Sandholm et al., 1999))
6. The optimal coalition structure will be recognized
by agents.
4 EXPERIMENT
We conduct experiment of our algorithm within a
range of 10 − 100 agents. In each round, the agents
number increases by 5. The number of goods and re-
sources are equal and increase by 1 in every 2 rounds.
In each round, the technology matrix, agents’ re-
sources and cooperation costs among agents are ran-
domly generated with uniform distribution. The num-
ber of each resource α
ij
in the technology matrix is
in the range 0 − 10. The prices of the goods are in
the range of 10 − 20 while the cooperation costs are
in the range of 0 and the number of agents in that
round, e.g., 10, 15,.... As our algorithm deals with
non-superadditive environments, this setting tends to
increase the cooperation cost of a coalition as its size
grows. Hence it forces agents to work harder to form
profitable coalitions and to achieve optimal coalition
structure. Both algorithms uses the Simplex algo-
rithm to find the optimal solution for each coalitions.
The revenue generated is subtracted to achieve the
coalition’s profit.
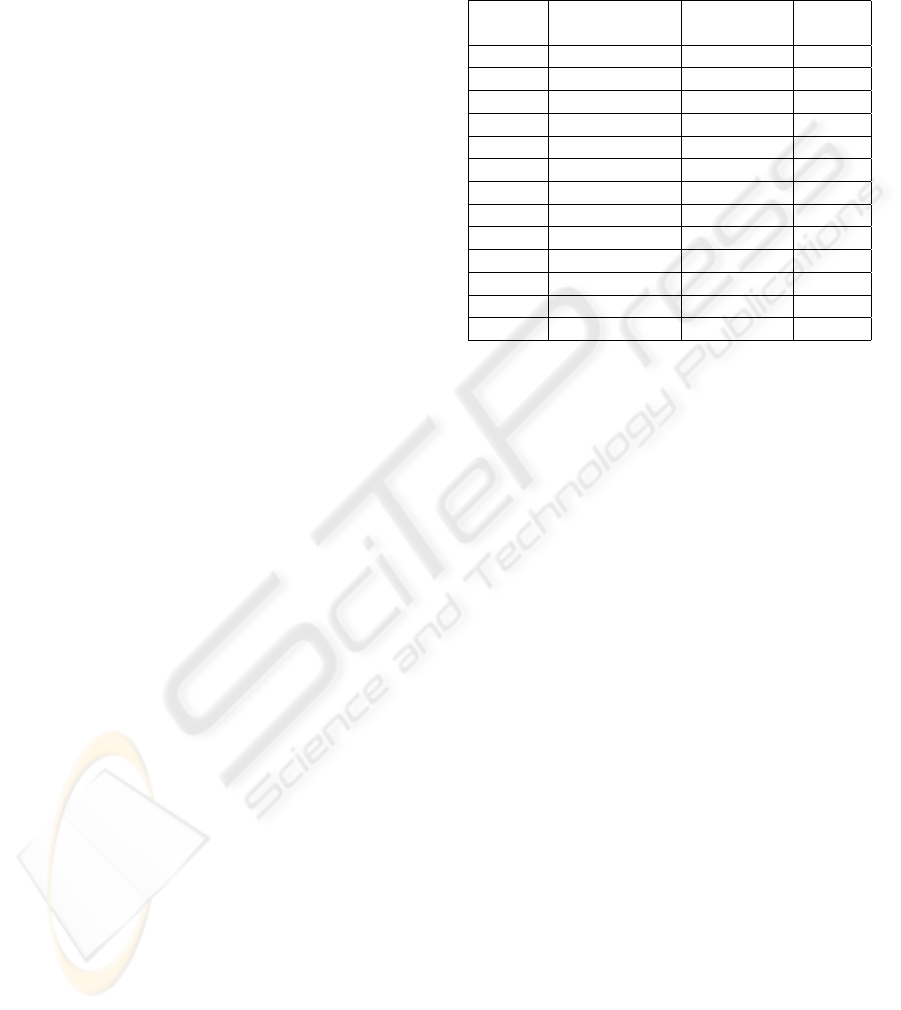
The Table 1 compares the average deliberation time
agents spent using exhaustive search and that using
our algorithm. The time is measured in millisec-
onds. We experienced that exhaustive search hardly
make progress after the number of coalitions gen-
erated exceeded 2.5 millions. As shown in the ta-
ble, the time spent on deliberation using exhaustive
Table 1: This table compares the average deliberation time
of each agent using our algorithm against exhaustive search.
Our algorithm outperforms exhaustive search after the num-
ber of agents exceeds 35 (exhaustive time not available—
NA).
No. of No. of Goods Exhuastive Our
Agents Resources Search Search
10 4 781 121
15 4 42269 123
20 5 1272703 197
25 5 5092317 234
30 6 19384629 607
35 6 80429663 1608
40 7 NA 1696
50 8 NA 4730
60 9 NA 13346
70 10 NA 24298
80 11 NA 23276
90 12 NA 26933
100 12 NA 81845
search was approximately doubled as the number of
agents increased by 1. With 20 agents, the time spent
on deliberation using exhaustive search is far larger
than that using our algorithm. Our computer system
could not carry on simulations any further after we
reached 35 agents using exhaustive search. We con-
tinued experiment using our algorithm until the num-
ber of agents reached 100. (Although we carried on
the experiment up to 300 agents, the results are not
shown here.) Since the number of coalitions gener-
ated are small, the optimal coalition structure can be
found more rapidly.
Having pruned a large number coalitions, the num-
ber of remaining coalitions are small. Hence the num-
ber of coalition structures are small. Applying exist-
ing algorithm can intuitively achieve optimal coalition
structure in timely fashion.
5 RELATED WORK
Shehory et. al (Shehory and Kraus, 1995) propose
an algorithm to allocate tasks to agents in distributed
problem solving manner, i.e., agents try to maximise
the utility of the system. They consider a domain
where a task composed of multiple subtasks, each of
which requires specific capacity. These tasks have to
be carried out by agents who have specific capacities
to carry out tasks. Each agent prepares its list of can-
didate coalitions and proposes to other agents.
Shehory et. al. (Shehory and Kraus, 1996)
study overlapping coalition formation in distributed
A DISTRIBUTED ALGORITHM FOR COALITION FORMATION IN LINEAR PRODUCTION DOMAIN
21

problem solving systems in non-superadditive envi-
ronments. Althhough agents can belong to multiple
coalitions at the same time, agents execute one task
at a time. The task allocation process is completed
prior to the execution of the tasks. Agents are group-
rational, i.e., they form coalition to increase the sys-
tem’s payoff.
Sandholm et. al. (Sandholm and Lesser, 1995)
analyze coalition formation among self-interested
agents who are bounded-rational. They consider de-
liberation cost in terms of monetary cost. The agents’
payoffs are directly affected by deliberation cost. In
their work, agents agree to form coalition and each of
the agents can plan to acheive their goals.
Soh et. al. (Soh and Tsatsoulis, 2002) propose
an integrated learning approach to form coalition in
real time, given dynamic and uncertain environments.
This work concentrates on finding out potential coali-
tion members by utilising learning approach in order
to quickly form coalitions of acceptable quality (but
possibly sub-optimal.)
Sandholm et. al. (Sandholm et al., 1999) study the
problem of generating coalition structure generation.
Since the number of coalition structure can be very
large for exhaustive search, they argue whether the
optimal coalition structure found via a partial search
can be guaranteed to be within a bound from opti-
mum. They propose an anytime algorithm that es-
tiblishes a tight bound withing a minimal amount of
search.
6 CONCLUSION AND FUTURE
WORK
Coalition formation is an important area of research
in multi-agent system. The problem of generating
optimal coalition structure, the partitioning of a set
of agents such that the sum of all coalitions’ values
within the partitioning is maximal, is an important is-
sue in the area. The small number of existing stud-
ies assume each coalition value is known a priori.
Such assumption is impractical in realworld settings.
Furthermore, finding all coalition values becomes in-
tractable for a relatively small number of agents.
We study coalition formation among fully coopera-
tive agents where each coalition value is not known a
priori. We proposes a distributed algorithm to gener-
ate optimal coalition structure by reducing the num-
ber of coalitions to be involved. Since they do not
help increasing coalition structures’ values, the non-
profitable coalitions are not generated by the delib-
eration algorithm. If there is any, each agent delete
them first. Then the information of remaining coali-
tions will be exchanged among agent. For each coali-
tion size, each agent prunes its list of coalitions again
deleting those, whose centres are not the agent it-
self and those whose values are not maximal within
their coalition sizes. Remaining coalitions will be ex-
changed among agents again. Lastly, each agent uses
existing algorithm (Sandholm et al., 1999) to com-
pute optimal coalition structure.
Although this algorithm helps reducing number of
coalitions involved in generating optimal coalition
structure, there is always rooms to improve. We want
to further reduce the number of coalitions generated
by each agent and want to make sure that coalitions
generated are highly likely to be in the coalition struc-
ture. Furthermore, we want to improve the coalition
algorithm rathan using existing one.
REFERENCES
Dang, V. D. and Jennings, N. R. (2004). Generating coali-
tion structures with finite bound from the optimal
guarantees. In Third International Joint Conference
on Autonomous Agents and Multiagent Systems - Vol-
ume 2 (AAMAS’04), pp. 564-571.
Kahan, J. P. and Rapoport, A. (1984). Theories of Coalition
Formation. Lawrence Erlbaum Associates, Hillsdale,
New Jersey.
Owen, G. (1975). On the core of linear production games.
Mathematical Programming 9 (1975) 358-370.
Sandholm, T., Larson, K., Andersson, M., Shehory, O., and
Tohmé, F. (1999). Coalition structure genera-
tion with worst case guarantees. Artif. Intell., 111(1-
2):209–238.
Sandholm, T. and Lesser, V. (1995). Coalition Forma-
tion among Bounded Rational Agents. 14th Inter-
national Joint Conference on Artificial Intelligence,
pages 662–669.
Shehory, O. and Kraus, S. (1995). Task allocation via coali-
tion formation among autonomous agents. In Proc. of
IJCAI, pages 655–661.
Shehory, O. and Kraus, S. (1996). Formation of overlap-
ping coalitions for precedence-ordered task-execution
among autonomous agents. In ICMAS-96, pages 330–
337.
Soh, L.-K. and Tsatsoulis, C. (2002). Satisficing coali-
tion formation among agents. In Proceedings of the
first international joint conference on Autonomous
agents and multiagent systems, pages 1062–1063.
ACM Press.
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
22
