
REAL-TIME LABEL INSERTION IN LIVE VIDEO THROUGH
ONLINE TRIFOCAL TENSOR ESTIMATION
Robert Lagani
`
ere
School of Information Technology and Engineering
University of Ottawa
Johan Gottin
´
Ecole Sup
´
erieure d’Ing
´
enieurs d’Annecy
Annecy, FRANCE
Keywords:
Augmented reality, trifocal tensor transfer, automatic labelling.
Abstract:
We present an augmented reality application that can supplement a live video sequence with virtual labels
associated with the scene content captured by an agile video camera moving inside an explored environment.
The method proposed is composed of two main phases. First, a matching phase where reference images are
successively compared with the captured images. And, second, a tracking phase that aims at maintaining the
correspondence between a successfully matched reference image and each frame of a captured sequence. La-
bels insertion is based on projective transfer using the trifocal tensor, this one being estimated and continuously
updated as the camera is moved inside the scene.
1 INTRODUCTION
Augmented reality (AR) is the technique of choice
when one wants to supplement a user’s view with
useful information concerning an observed scene.
Among the many ways by which content aware in-
formation can be added to a video sequence, adding
text annotations is probably one of the simplest but
effective way to proceed. Under this mode, some of
the scene objects are associated with informative texts
that are overlaid on the video when these objects be-
come visible. The displayed information often con-
sists in text labels pointing to the object’s parts they
describe. Such system would be particulary useful to
a mobile user exploring an unfamiliar environment.
Using a simple PDA equipped with a camera, or a
more sophisticated HMD, virtual overlays would ap-
pear on the images collected by the device, helping
the user in understanding the scene content. A possi-
ble use scenario is the case of a tourist visiting an art
gallery and for whom the supplemented labels would
provide information about the exhibited objects. Al-
ternatively, the system could assist a technician in the
inspection of a given building; the added virtual la-
bels would then represent a source of complementary
information (such as inventory numbers, ownership,
etc.) to help him in the accomplishment his tasks.
The augmented reality application presented here
is an automatic annotation system that can insert, at
frame rate, virtual labels associated with the scene
content captured by an agile video camera that freely
moves inside an explored environment. The core of
this application relies on an online-tensor estimation
scheme that has been presented in (Li et al., 2004)
and that has proven to be effective in AR. In this lat-
ter application, virtual objects are added to a scene
by transferring a virtual marker from two reference
views to the current view. We use here the same con-
cept to transfer labels from reference views to a video
frame with the difference that multiple reference im-
ages are now used. Also, a matching phase has been
introduced to detect when the current video is visu-
alizing scene elements for which textual annotations
are available and to identify the reference frames on
which this information has been entered. The method
proposed here is therefore composed of two phases.
First, this matching phase where the reference images
are successively compared with a current frame. And,
second, a tracking phase where the correspondence
between a successfully matched reference image and
each frame of the captured sequence is maintained.
An important asset of the proposed method is that it
doesn’t require estimation of the camera pose, neither
the use of some external localization sensor or the re-
course to some special markers inserted, beforehand,
inside the scene. Labels insertion is based on projec-
tive transfer using the trifocal tensor, this one being
estimated and continuously updated as the camera is
435
Laganière R. and Gottin J. (2006).
REAL-TIME LABEL INSERTION IN LIVE VIDEO THROUGH ONLINE TRIFOCAL TENSOR ESTIMATION.
In Proceedings of the First International Conference on Computer Vision Theory and Applications, pages 435-441
DOI: 10.5220/0001377504350441
Copyright
c
SciTePress

moved inside the scene. The estimation scheme we
have developed demonstrates that it is possible to ob-
tain quick and reliable estimates of the trifocal tensor.
A simple tracker is used to provide an evolving set
of point triplets. Stable performance of tracking over
long video sequences is also ensured through the au-
tomatic recovering of lost points and the removal of
wrong traces using trifocal transfer.
The next section briefly reviews some existing sys-
tems while Section 3 presents the trifocal tensor. Sec-
tions 4 and 5 describe the proposed online labelling
procedure. Section 6 explains our online tensor esti-
mation scheme. Results of video frame augmentation
are presented in Section 7. Section 8 is a conclusion.
2 RELATED WORKS
Most of the existing automatic scene annotation sys-
tems rely on the use of positional sensors in order to
determine user’s 3D position and viewing direction.
In addition, an accurate model, describing the cur-
rent position of the objects of interest, is also required.
This is the case of the system in (Newman et al., 2001)
that uses ultrasonic pulses that are read by receivers
located at fixed position in the ceiling. Accurate 3D
position is then obtained from times-of-flight calcula-
tion. The objective of the augmented reality system in
(Bell et al., 2002) is to provide a situation-awareness
aid to a user in the form of a world in miniature repre-
sentation of the environment and that is embedded in
the user’s view. By selecting specific objects, either
in the scene image or in the virtual miniature repre-
sentation, pop-up annotations are displayed.
General real-time AR systems can also be used for
virtual label insertion. In the calibration-free system
described in (Kutulakos and Vallino, 1998), four or
more non-coplanar points are tracked along the video
and an affine object representation is used to over-
lay virtual objects on a video stream. However, the
used control points have to be visible in every frame,
which restricts the range of views in which augmen-
tations can take place. The method in (Lourakis and
Argyos, 2004) is able to recover the camera positions
in close to real-time through the chaining of homogra-
phies computed from the tracking of 3D planes. The
AR system proposed in (Chia et al., 2002) computes
camera pose by using the epipolar constraints that ex-
ists between every video frame and two keyframes.
An alternative method consists in linking the video
frames with two keyframes; trifocal tensor is then
computed to transfer the location of the virtual ob-
ject from the keyframes (Boufama and Habed, 2005).
Another recent system that performs very well in real
time scene augmentation is the one proposed in (Vac-
chetti et al., 2004). In addition to keyframes, the
system also needs a 3D model of the target object.
By matching the current frame with a preregistered
keyframe, 2D-3D correspondences are obtained using
which virtual augmentation can be performed.
These approaches generally necessitate full calibra-
tion information, including all camera projection ma-
trices associated to the selected keyframes. AR sys-
tems not requiring any metric information would be
more flexible and easier to deploy. This is the solu-
tion proposed by the application described here.
3 THE TRIFOCAL TENSOR
The augmented reality system proposed here relies
on projective geometry concepts, well-known in com-
puter vision, and that describes the relation between
the multiple views of a same scene. In particular,
the trifocal tensor which is a mathematical entity de-
scribing three-view geometry. It can represented by a
3×3×3 matrix T. This one can be computed from at
least 5 correspondences over the three views. The key
benefit brought by this tensor matrix resides in the fact
that if a match (x, x
) is already known between the
first two images, the position of the matching point x
in the third image can be determined exactly using:
x
l
= x
i
3
k=1
x
k
T
kjl
− x
j
3
k=1
x
k
T
kil
(1)
which defines 9 trilinearities for i, j ∈{1, 2, 3},4of
which are linearly independent. In the context of au-
tomatic label insertion, this means that if the tensor
relation between two reference images and a current
view can be maintained, then the labels specified in
these reference views can be transferred to the cur-
rent frame at their appropriate locations. This is the
strategy that is exploited here.
In the case of two views only, the projective relation
is described by a 3 × 3 matrix, the fundamental ma-
trix. This one defines an epipolar constraint that states
that the homolog of any point will necessarily lies on
a line (the epipolar line of that point) in the other view.
One use of this constraint is to validate putative match
pairs by verifying if the proposed matched point in-
deed lie on the corresponding epipolar lines. Note
that the trifocal tensor can also be used to validate
triplet of matches. Indeed, the trilinear constraint (1)
is always satisfied for good matches.
Tensor estimation and point transfer are used by
the online label insertion process. Guided matching
and match validation based on fundamental and ten-
sor matrices are used during the label specification
phase as explained in the sections to follow.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
436

4 LABEL SPECIFICATION
The initial phase consists in specifying label locations
on the reference images. In order to be able to transfer
these labels on arbitrary views, it is required to specify
each of them on at least two reference views. How-
ever, since the tensor estimation process requires a set
of good matched points, three views of each object of
interest are used as it is the most favorable configura-
tion to obtain reliable feature matching.
The reference images are captured by moving a
camera at three different locations. Points are de-
tected in the first image and as the camera is moved
from location 2 and 3, these points are tracked from
frame to frame (we used here the Lucas-Kanade
tracker). The points successfully tracked from the first
reference image to the third one constitute an initial
match set that can then be validated and refined. To do
so, we use an approach that combines the RANSAC
projective procedure described in (Roth and White-
head, 2000) and the calibrated matching procedure
proposed in (Vincent and Lagani
`
ere, 2002). The net
result is therefore three reference images for which a
rich and reliable set of matched triplets is available.
This pool of matches will be used during the online
label insertion procedure.
The interactive label insertion procedure can then
be undertaken using these three reference images.
Each label is inserted by first specifying its location
in one reference image. Its location on a second refer-
ence image is then specified, but this time guided by
the epipolar geometry (computed from the available
match set), as shown in Figure 1. The location of the
label in the third image does not have to be specified,
as this one can be computed by virtue of the trifocal
tensor transfer property.
Once all the labels, for each object of interest have
been inserted, the live video augmentation application
can be launched.
5 ONLINE LABEL INSERTION
When the application is running, images are continu-
ously acquired using a camera that is freely moved
inside the scene. The online label insertion proce-
dure is composed of two phases: a matching phase,
where references images are compared with the video
frames in order to determine which labels have to be
inserted, and a tracking phase that allows to keep dis-
playing the labels at their appropriate locations. The
complete process is described in Figure 2.
Figure 1: Specification of the virtual labels in reference im-
age 1 (top) and guided insertion (i.e. the associated point
must be on the epipolar line shown) of ’redial’ label in the
second reference image (bottom).
5.1 The Matching Phase
Ideally, each of the captured frame should be com-
pared with all the stored reference images. How-
ever, even if feature-based matching is applied here,
such an exhaustive matching procedure could be quite
costly. For this reason, matching is performed on only
a subset of the available reference images. At the next
capture, a different subset is selected. This strategy
allows keeping the processing rate sufficiently high
while giving access to a large quantity of reference
images. Obviously, it might take few captures before
a successful match is obtained, but with an adequate
frame rate, the response can remain acceptable.
Each putative matching between a video frame and
a reference image is then validated by checking if the
established match set is supported by a valid 2-view
geometry. In order to reduce the computational cost
of this operation, an accelerated random sampling
strategy is applied here. Eight feature matches are
randomly selected and the corresponding fundamen-
tal matrix is computed. The match between the two
images will be considered to be good, if a large num-
ber of individual matches supports this fundamental
matrix; that is if for a given match pair, one point
lies close to the epipolar line of the other point, as
computed by this matrix. To speed up this validation,
the test is performed using only 8 match pairs among
which 6 must support the geometry in order for the
match to be accepted. That simplified strategy does
not fully guarantees the validity of a match, but the
probability that a wrongly matched pair of images sur-
vives to this test is nevertheless very low. Once an im-
age match pair has been accepted, an additional filter-
REAL-TIME LABEL INSERTION IN LIVE VIDEO THROUGH ONLINE TRIFOCAL TENSOR ESTIMATION
437
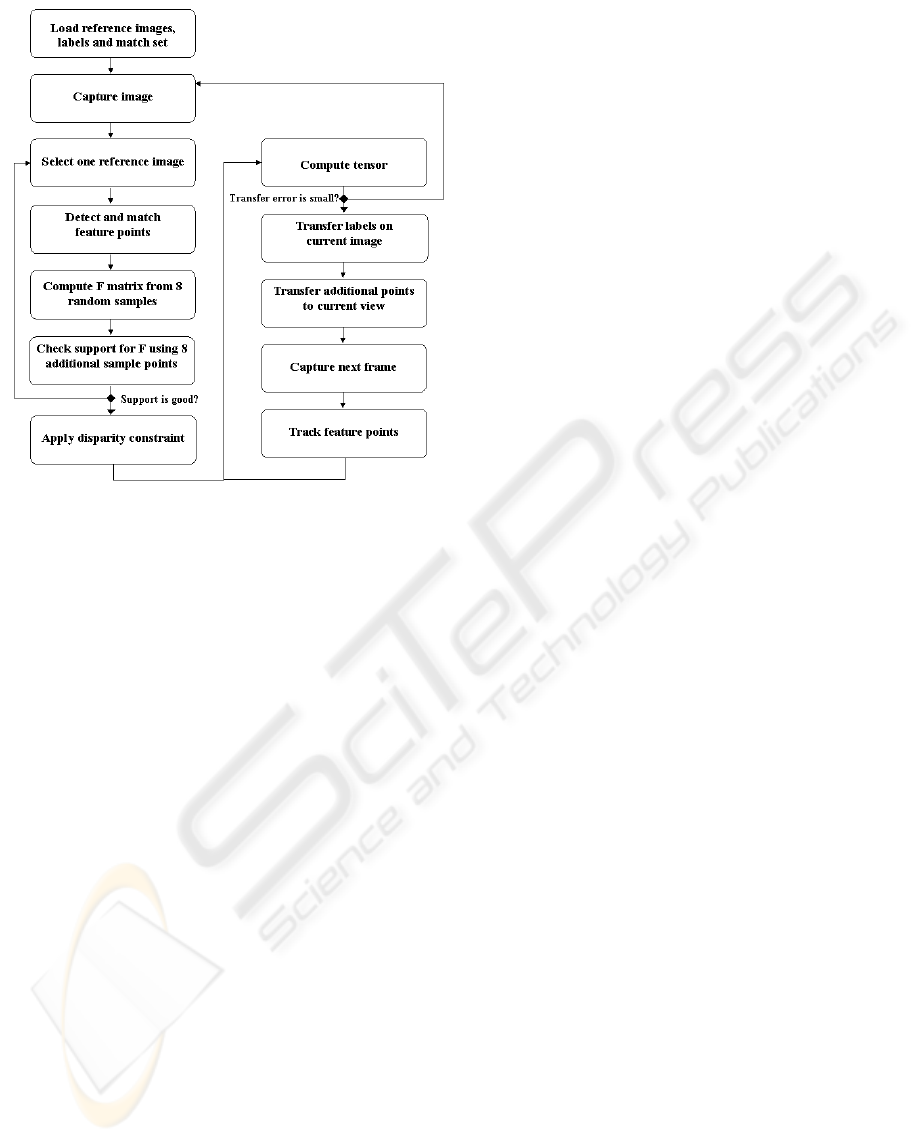
Figure 2: The virtual label insertion process.
ing step is applied on the proposed match set in order
to eliminate the obvious mismatches that remain. The
disparity constraint has proven to be quick and effec-
tive in performing this task (Vincent and Lagani
`
ere,
2001). It consists in eliminating any feature match
exhibiting a disparity vector that largely differs from
its neighbors. At this stage, a match is considered to
have been established between a reference image and
the currently seen image. This latter can now be sup-
plemented with the appropriate virtual labels; this is
done at the tracking phase.
5.2 The Tracking Phase
As mentioned previously, the transfer of the labels
from the reference image to the current is done using
the trifocal tensor. This is possible because each ref-
erence image is associated with two other reference
images, forming a triplet for which a rich match set is
available (as explained in Section 4). This means that
the image matching obtained is, in fact, a matching
between one image and the three images of a series of
reference images. It is therefore possible to compute
a tensor between a current frame and two of the im-
ages of the series. This tensor must however be com-
puted quickly in order to keep the frame rate high.
This computation must also be robust, as some false
matches are probably present in the match set found
during the matching phase. In addition, the estimated
tensor must have a good accuracy in order to pro-
duce well localized scene labels. For this reason, the
the tensor is estimated using an algebraic minimiza-
tion method and its accuracy is improved afterwards
through a quick outlier removal step. The details of
this online tensor estimation procedure are given in
the next section.
With an accurate tensor in hands, it is easy to trans-
fer the labels from the reference images to the current
view. The points that have been matched in this cur-
rent view are then tracked from frame to frame in or-
der to maintain the relation with the current series of
reference images. At each new camera position, the
tensor must be re-estimated with the match set that
includes the current frame points at their currently
tracked location. It is important to note that, when
points are tracked over time, more and more features
are unavoidably lost. If nothing is done, the tracked
set will eventually vanish. To overcome this prob-
lem, the match set is updated after each tensor esti-
mation. Indeed, using the pool of matches available
in the reference images, it is possible to transfer addi-
tional points on the image using that newly estimated
tensor. This last step ensures the long term viability
of the tracking phase.
6 ONLINE ESTIMATION OF THE
TENSOR
In this section we describe a method to quickly esti-
mate the trifocal tensor based on the use of two ref-
erence frames. This approach has been introduced in
(Li et al., 2004) for augmenting a scene in realtime
with virtual objects.
The trifocal tensor describes the projective geo-
metric relation of image triplets taken from cameras.
It can be conveniently estimated using the so-called
Algebraic Minimization method (Hartley and Zisser-
man, 2000). However, in the present application, two
problems have to be overcome: first, the tensor es-
timation process must be fast; and second, the esti-
mated tensors must be accurate. This is to say that
we have to use all available matches when estimating
a tensor. Consequently, we have to counter the effect
of false matches introduced in the matching phase and
also, in the tracking phase. In fact, it is during this lat-
ter phase that outlier rejection is the most crucial. In-
deed, it is unavoidable that the tracker will lose some
features, and will introduce some wrong traces. This
is especially true in the case of sequences produced by
handheld cameras involving quick and saccadic mo-
tion. The estimation process therefore has to be ro-
bust to the presence of outliers. In order to solve this
problem, we developed an estimation scheme that ex-
ploits the geometrical properties of the problem and
that uses rapid robust estimation strategies.
One important properties of our system geometry
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
438
Figure 3: Average transfer error on the computed tensors in
a sequence of 1749 frames. Top: the tensors computed from
all putative triplets using AM; Middle: the improvements
achieved by using fixed projection matrices; Bottom: the
resulting tensors refined by applying the x84 rule.
resides in the fact that the tensors to be estimated are
always associated with two fixed views (the reference
frames). Since the algebraic method uses parame-
trization of the projection matrices, we therefore have
two of the three projection matrices known which re-
duces the dimensionality of the problem. Our exper-
imentations have also shown that tensor estimation
subject to a fixed projection matrices exhibit reliable
performance over long sequences. In addition, it has
the capability to attenuate the effect of false matches
and stabilizes the estimation results when only few
features are being tracked.
Each time a new tensor is computed using the al-
gebraic minimization approach, the average value of
the residual errors is then computed in order to as-
sess the quality of the resulting transfer. If its value
is smaller than a given threshold (we used 3 pixels),
then the tensor is judged to be of good quality and can
be used as is. Otherwise, additional steps to identify
and eliminate potential outliers are undertaken.
The strategy used to re-estimate the tensor depends
on the number of supporting triplets in the set of
points. When the proportion of supporting triplets is
high, this means that the quality of the tensor is not
good mainly because of the presence of a few strong
outliers. In this case, a statistical method based on the
so-called x84 rule (Fusiello et al., 1999) is used. Ab-
solute deviations of all triplets’ residual error are cal-
culated, from which a threshold is set as the 5.2 MAD
(Median Absolute Deviation). Points having larger
deviations are considered outliers and are eliminated.
In the opposite situation, i.e. when the number of
supporting triplets is relatively low, then the current
tensor is not able to guide the identification of out-
liers. Cross-correlation has to be performed on each
Figure 4: Few frames of an online label insertion sequence
using the reference images of Figure 5.
putative triplet. All features on the current frame that
do not correlate well their potential correspondences
on both reference frames are rejected.
Once the outliers are rejected using one or the other
of these methods, the tensor has to be re-estimated
with all remaining triplets and its quality needs again
to be re-evaluated. The validity of the proposed es-
timation scheme is illustrated in Figure 3. The accu-
racy of the estimated tensor, in terms of transfer er-
ror (in pixels), has been evaluated for each frame of
a long sequence where the camera was freely moved
around the scene of interest. The first graph is the
result of tensor estimation using only the Algebraic
method. The obtained errors illustrate well the neces-
sity of using additional steps to refine the tensor esti-
mates. The second graph shows how the introduction
of the fixed-projection-matrices constraint stabilizes
the results. Finally, the extra robust estimation steps
further improve the results by eliminating the remain-
ing outliers in the match set as shown in the bottom
graph.
7 RESULTS
Figures 4 to 7 presents few images showing re-
sults obtained when running our scene augmenta-
REAL-TIME LABEL INSERTION IN LIVE VIDEO THROUGH ONLINE TRIFOCAL TENSOR ESTIMATION
439

tion application. The system runs at approximately
14 frames/second on a regular P4 1.2GHz com-
puter equipped with a web cam with a resolution of
320x240.
The first image of Figure 7 corresponds to the situ-
ation where a successful match has been obtained; in
this case, the camera frame has been matched to the
third reference image (shown in Figure 6). All the fea-
ture points that have been used to assess the validity
of this match are shown in light gray (the short lines
associated with each point correspond to the displace-
ment between the two matched images). These points
are also used to compute the tensor relation between
that current view and two reference images (here we
used reference images 1 and 2). Labels can then be
displayed and are pointing to the correct location by
virtue of the tensor transfer operation. The camera
is moved and new images are captured, the matched
point are tracked, the tensor is updated and the labels
are again transferred. Figure 7 shows other images
of the sequence in which the labels are indeed always
pointing at the right location.
In normal operation just the labels are shown and
not the feature points used for matching. This is
shown in Figure 4 and 5 where, this time, the 6 refer-
ence images of Figure 5 are used to annotate the video
sequence of Figure 4.
8 CONCLUSION
An augmented reality system has been presented
where a video sequence can be augmented with tex-
tual annotations. The augmentation is accomplished
by following a 2-step process. First, each incom-
ing frame of the captured video is matched with a
set of reference images. Currently a simple, but effi-
cient, matching scheme is used where points are cor-
related by comparing their respective neighborhood.
The fact that each putative match is validated geomet-
rically eliminates most false matches. However, we
are currently investigating other matching strategies
that would make the matching process more robust to
perspective variation and changes in illumination.
The second step requires continuous estimation of
the trifocal tensor relation. The fact that we have in
hands a reliable set of matches associated to the refer-
ence images is key in this operation. Good tensor esti-
mates can therefore be quickly obtained using which
label transfer (from the reference views where they
have been inserted to the current view) becomes pos-
sible. By tracking the points over time, the tensor esti-
mate can be updated resulting in stable label insertion.
The main advantage associated with the use of pro-
jective entities (such as the tensor and the fundamen-
tal matrix) resides in the fact that no calibration in-
formation is required. The system can then easily
accommodate the use of different camera, as well
as zoom changes occurring during the augmentation
process. Neither 3D pose information nor metric in-
formation about the scene are required.
REFERENCES
Bell, B., Hollerer, T., and Feiner, S. (2002). An anno-
tated situation-awareness aid for augmented reality. In
Proc:UIST ACM Symp. on user interface sofware and
technology, pages 213–216.
Boufama, B. and Habed, A. (2005). Registration and track-
ing in the context of ar. ICGST Int. Journal on Graph-
ics Vision and Image Processing, V3.
Chia, K., Cheok, A., and Prince, S. (2002). Online 6 dof
augmented reality registration from natural features.
In Proc. International Symposium on Mixed and Aug-
mented Reality(ISMAR), pages 223–230.
Fusiello, A., Trucco, E., Tommasini, T., and Roberto, V.
(1999). Improving feature tracking with robust statis-
tics. Pattern Analysis and Applications, 2:312–320.
Hartley, R. and Zisserman, A. (2000). Multiple View Geom-
etry in Computer Vision. Cambridge University Press.
Kutulakos, K. and Vallino, J. (1998). Calibration-free aug-
mented reality. IEEE trans. on Visualization and Com-
puter Graphics, 4:1–20.
Li, J., Lagani
`
ere, R., and Roth, G. (2004). Online estima-
tion of trifocal tensors for augmenting live video. In
IEEE/ACM Symp. on Mixed and Augmented Reality,
pages 182–190.
Lourakis, M. and Argyos, A. (2004). Vision-based camera
motion recovery for augmented reality. In Computer
Graphics Int. Conference, pages 569–576.
Newman, J., Ingram, D., and Hopper, A. (2001). Aug-
mented reality in a wide area sentient environmemt.
In Int. Symp. on Augmented Reality, pages 77–86.
Roth, G. and Whitehead, A. (2000). Using projective vi-
sion to find camera positions in an image sequence. In
Proc. of Vision Interface, pages 225–232.
Vacchetti, L., Lepetit, V., and Fua, P. (2004). Stable real-
time 3d tracking using online and offline information.
IEEE trans. on Pattern Analysis and Machine Intelli-
gence, 26:1385–1391.
Vincent, E. and Lagani
`
ere, R. (2001). Matching feature
points in stereo pairs: A comparative study of some
matching strategies. Machine Graphics and Vision,
10:237–259.
Vincent, E. and Lagani
`
ere, R. (2002). Matching feature
points for telerobotics. In IEEE Int. Workshop on Hap-
tic Virtual Env. and Applications, pages 13–18.
VISAPP 2006 - MOTION, TRACKING AND STEREO VISION
440
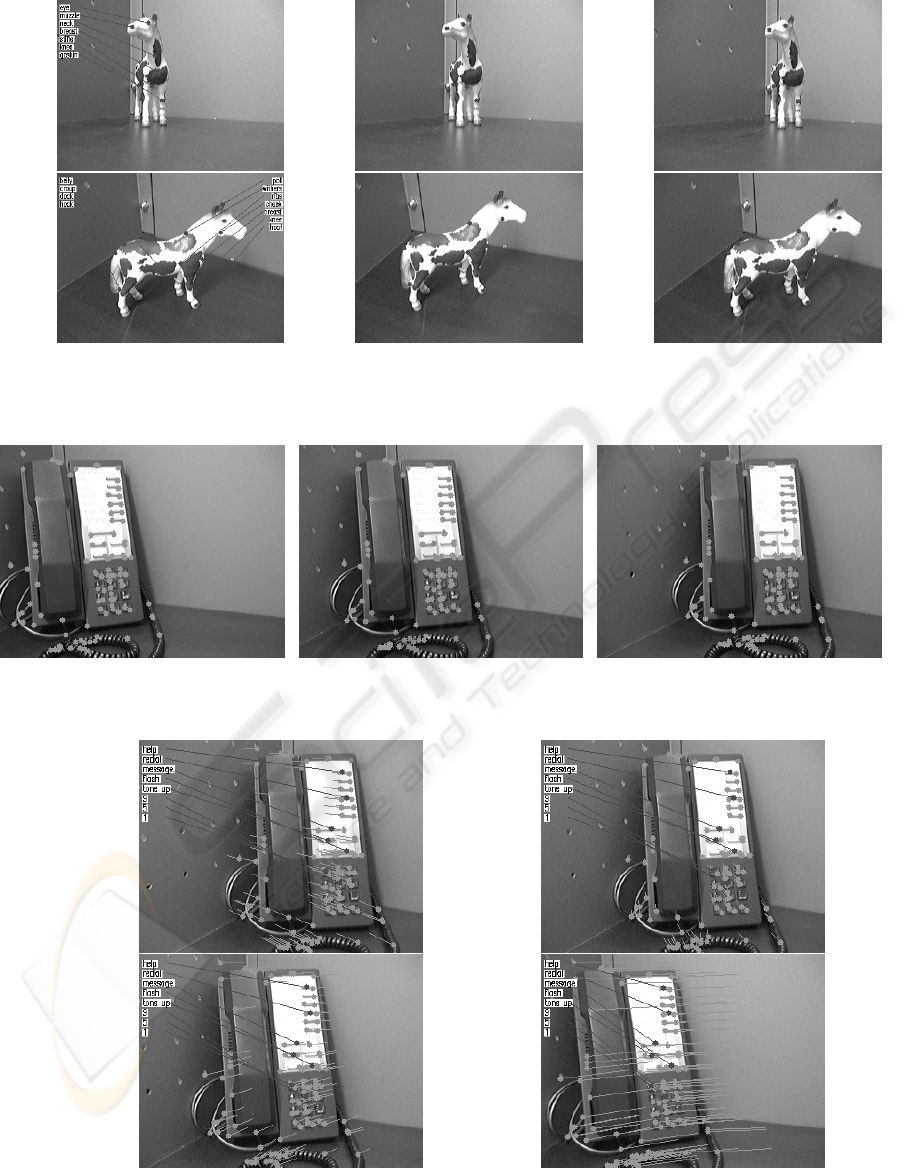
Figure 5: Annotation on the horse object. In order to accommodate changes in point of view, two series of reference images
are used here. The labels have been inserted in the first image of each series, as shown here.
Figure 6: The three reference views and the set of matches.
Figure 7: An image is matched with the third reference image of Figure 3, making label insertion possible; label locations are
then correctly tracked over time.
REAL-TIME LABEL INSERTION IN LIVE VIDEO THROUGH ONLINE TRIFOCAL TENSOR ESTIMATION
441
