
ADAPTIVE LEVEL OF DETAIL WITH OCCLUSION CULLING
Hermann Birkholz
University of Rostock
Albert-Einstein-Str. 21, 18059 Rostock, Germany
Stefan Rahn
University of Rostock
Albert-Einstein-Str. 21, 18059 Rostock, Germany
Keywords:
Level of Detail, Occlusion Culling.
Abstract:
Many techniques have been developed in order to accelerate the visualization of large triangle meshes. Level
of Detail techniques can be used to create view-dependent approximations of wide range scenes with low
occlusion, such as landscapes. For highly occluded scenes there exist many occlusion culling techniques,
which discard occluded parts of the scene before rendering. This can drastically speed up the visualization
of such scenes but will not improve rendering of wide non-occluded scenes. In this paper we will combine
both acceleration methods. We present a new approach, which combines the benefits of Level of Detail
rendering and of Occlusion Culling, in order to minimize their drawbacks. The technique adds occlusion as
a view-dependence criterion for Level of Detail rendering and is even able to optimize the refinement of self
occluding meshes.
1 INTRODUCTION
Very large triangle meshes can easily be acquired by
current 3d-scanning hardware. Meshes consisting of
millions of triangles exceed the capabilities of modern
graphics hardware in interactive rendering. Interac-
tive frame rates can be achieved only by a reduction
of the number of triangles before rendering. Level
of Detail (LOD) algorithms create hierarchical de-
scriptions of meshes by iteratively simplifying them
locally. All local simplifications are stored together
with an error estimation and thus form the hierarchy.
This enables view-dependent approximations of the
original mesh. The approximation process uses the
hierarchy in order to refine the parts of the mesh that
are situated within the view frustum and that do not
face away from the viewer. The mesh complexity is
locally adopted to the viewpoint distance. All these
parameters enable interactive frame rates for large tri-
angle meshes but produce poor approximations for
highly occluded views. Due to the lack of occlusion
information, occluded parts of a mesh are refined in
the same way as non-occluded ones. This problem
could be solved by an additional occlusion criterion
during the approximation process, which forbids fur-
ther refinement of occluded parts of the mesh. This
paper will show recent work regarding this problem
and presents an new integration technique for LOD
and occlusion culling.
2 RELATED WORK
The technique that is presented in this paper was influ-
enced by miscellaneous papers, which are reviewed in
this section.
2.1 Level of Detail Rendering
Many algorithms have been proposed to create LOD
hierarchies, which can be used to approximate tri-
angle meshes but do not consider occlusion. Hoppe
(Hoppe, 1997) shows how to use his earlier intro-
duced ”progressive meshes”(Hoppe, 1996) for view-
dependent rendering. The progressive meshes store
a edge-collapse sequence, which is used for the re-
construction of the original mesh. In each simplifi-
cation step the edge whose simplification causes the
least error is collapsed to a new vertex. This op-
eration removes one vertex and two triangles from
the surface. View-frustum and backface culling are
supported with bounding-spheres and normal-cones.
Another approach (Xia and Varshney, 1996) uses
”Merge Trees”, in order to present the LOD hierarchy.
279
Birkholz H. and Rahn S. (2006).
ADAPTIVE LEVEL OF DETAIL WITH OCCLUSION CULLING.
In Proceedings of the First International Conference on Computer Graphics Theory and Applications, pages 279-284
DOI: 10.5220/0001351302790284
Copyright
c
SciTePress

The ”Merge Tree” is constructed by repeated edge-
collapses in the original mesh. Backface and view-
frustum culling is supported with normal-cones and
bounding spheres, again. Garland and Heckbert (Gar-
land and Heckbert, 1997) extended the edge-collapse
hierarchies to vertex-contraction hierarchies, which
can also merge vertices without a shared edge. Fur-
thermore they introduced a new quadric error met-
rics in their paper. Newer techniques enable ren-
dering of very large LOD hierarchies from external
memory. Hoppe presented a hierarchical terrain man-
agement (Hoppe, 1998) that was extended to arbi-
trary meshes by Prince (Prince, 2000). An external
memory approach based on vertex-clustering was pre-
sented by Lindstrom (Lindstrom, 2003). With the
”adaptive TetraPuzzles” (Cignoni et al., 2004) a hi-
erarchy of tetrahedral cells is constructed from the
bounding box around the mesh. Each tetrahedral
cell is associated with a precomputed simplified part
of the original model. The tetrahedra-hierarchy is
adaptively refined and replaced with the precomputed
geometry of the tetrahedral cells.
2.2 Occlusion Culling
Another method to reduce the number of triangles that
has to be processed by the graphics hardware is to
detect and to cull occluded regions. In highly oc-
cluded scenes most triangles will not be visible and
the frame rate would significantly benefit from occlu-
sion culling. For wide and less occluded views how-
ever, there will be no improvements.
There exist several different approaches to deter-
mine the occluded parts of a scene. Some divide
the scene into disjoint cells and compute a set of
potentially visible triangles (PVS) for each cell in a
preprocess (Chrysanthou et al., 1998; Durand et al.,
2000; Schaufler et al., 2000). While rendering, only
triangles of the actual PVS are taken into account.
Due to the preprocess such techniques are only suited
for the visibility of static scenes.
Other algorithms determine occlusion in screen-
space and can be accelerated by graphics hard-
ware. The hierarchical z-buffer visibility, presented
by Greene (Greene et al., 1993), is meanwhile avail-
able in current graphics hardware and enables fast z-
tests for bounding objects. The z-buffer values are
hierarchically merged 4 by 1 and the deepest value
is chosen for each group. This allows to cull small
objects with only few z-tests in the upper hierarchy
levels. Greene recommends to store the scene in an
octree, whose cells are visibility-tested against the hi-
erarchical z-buffer and only processed further when
they are visible. The ”hierarchical occlusion maps”
used by Zhang (Zhang et al., 1997) allow hardware
supported occlusion culling with so-called occlusion
maps. He uses alpha-map hierarchies, whose opacity
values represent the opacity of selected occluders. Hi-
erarchy levels of the occlusion maps are generated by
subsampling the previous hierarchy level 4 by 1 (hard-
ware accelerated). These map hierarchies can then be
used in order to determine the visibility of occludees.
Screen space techniques have the advantage of build-
in occluder fusion. Because all occluders share the
screen space, they are merged implicitly.
Finally there exist algorithms that cull occluded
objects in the object-space. Hudson (Hudson et al.,
1997) constructs shadow frusta from all occluders and
tests the occludees against them. To accelerate the
selection of proper occluders, a preprocess assigns a
set of potentially good occluders to each viewpoint.
Coorg (Coorg and Teller, 1997) also determines po-
tentially good occluders for each viewpoint in a pre-
process. The occlusion test is then done with the help
of supporting and separating planes.
2.3 Integration of LOD and OC
In order to overcome the disadvantages of both Level
of Detail and occlusion culling, they were combined
in some approaches. Andujar (Andujar et al., 2000)
introduces ”Hardly-Visible Sets” in order to differen-
tiate partial occluded objects in the scene. He sug-
gests the use of LOD approximations as occluders to
determine occlusion and to use coarser approxima-
tions for the rendering of ”Hardly-Visible” objects in
the scene. He uses discrete LODs for the approxima-
tion and thus can guarantee neither image quality nor
the amount of geometry, which ist sent to the graphics
hardware.
An integration of approximate visibility and con-
tinuous LOD was presented by El-Sana (El-Sana
et al., 2001). They divide the space with a uniform
grid and store an opacity value for each cell, which
depends on the area of the projected geometry in the
cell. The split- and merge-criteria for the nodes in the
LOD hierarchy is now expanded by occlusion. For
each node a visibility value is estimated by tracing
the ray between viewer and hierarchy node through
the grid. The opacity values of the traversed cells are
combined, in order to determine which nodes to split
or to collapse. Due to the approximate estimation and
the discrete grid, the visibility might appear incorrect.
Furthermore, the traverse time for the visibility test
could consume much time in hardly occluded scenes.
The approach that is presented in this paper, com-
bines view-dependent LOD and occlusion culling in
another way. It uses coarse approximations of the fi-
nal mesh itself to determine occlusion during the re-
finement.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
280
3 OCCLUSION CONTROLLED
REFINEMENT
In this section we describe our algorithm for the
integration of view-dependent LOD and occlusion
culling. Multiple LOD objects can be approximated
in one scene and be freely moved in the scene. Vis-
ibility data is extracted online and does not demand
precomputed data.
We use a edge-collapse hierarchy, which stores
bounding volumes and normal cones for each node
in the hierarchy. The occlusion tests are done in the
z-buffer in image space resolution. Occluder fusion
is enabled implicitly, due to the use of the z-buffer.
Depth values of different occluders always merge to
a common occluder in z-buffer. We assume that the
LOD extraction process takes much more time of the
complete rendering procedure, than the time for the
actual rendering of the extracted geometry. This al-
lows us to render different versions of the occluders
with increasing detail into the z-buffer without signif-
icant effects to the frame rate. Our LOD extraction is
controlled by the number of triangles in the approx-
imation. The extraction stops when a given triangle
threshold is reached. The refinement always starts
with a coarse base mesh that is refined by vertex-split
operations. The refinement sequence is controlled by
the viewpoint distance and the visibility. The visibil-
ity of refinement candidates is determined with view-
frustum culling (bounding spheres), backface culling
(normal cones) and occlusion culling. Occlusion tests
are only initiated when the other culling tests fail.
All visible vertices are placed in a refinement prior-
ity queue. During the refinement process, always the
first vertex is removed from the queue, processed, and
its child-vertices are added when they are visible.
3.1 Occlusion Estimation
Occlusion culling is implemented with hardware oc-
clusion queries. These queries test given geometry
against the z-buffer of the graphics hardware with-
out modifying it and return the number of pixels that
would be visible if the geometry had been really ren-
dered. A coarse approximation of the mesh itself is
used as the occluder. It is rendered to the z-buffer and
the bounding volumes of vertices, which will poten-
tially be split, are tested against it. As the first oc-
cluder, a very coarse approximation of the mesh is
chosen, which of course was produced without occlu-
sion culling. For a better adoption this occluder mesh
can be updated several times during the refinement
process. As bounding volumes for the vertices, we
use simple shapes, that conservatively approximate all
refinement levels, which are stored in the subtree of
the vertex.
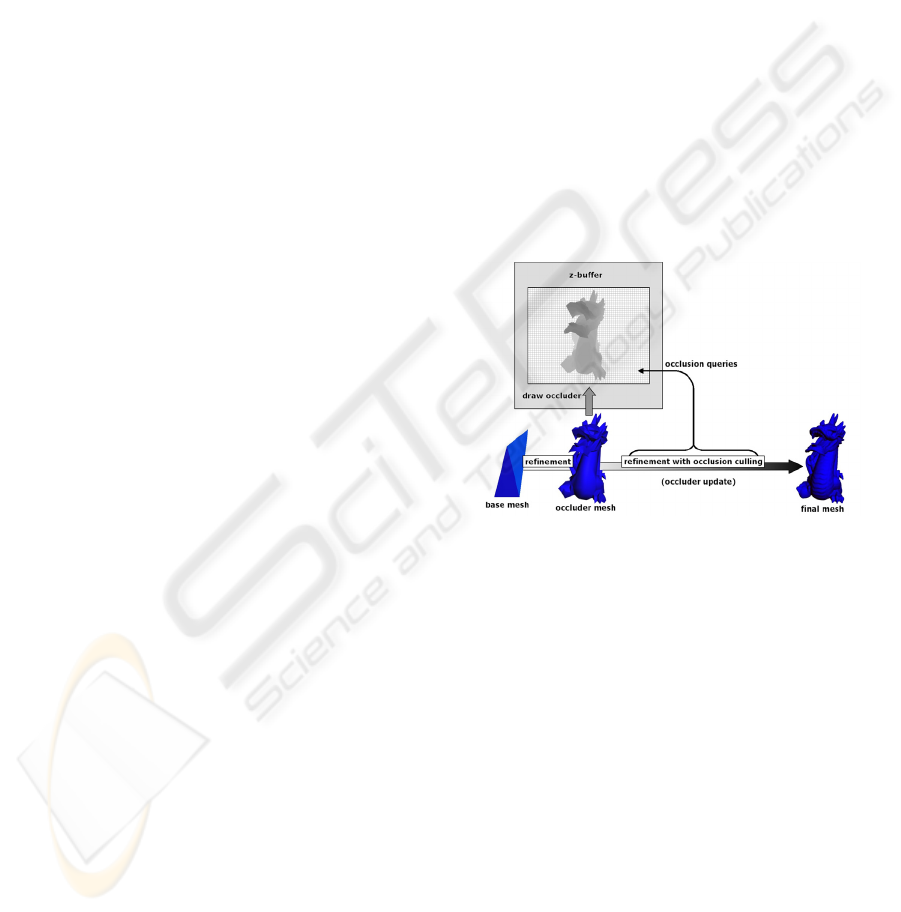
3.2 Algorithm
The complete refinement process consists of the fol-
lowing steps:
• Creation of a coarse approximation without occlu-
sion culling.
• Render the coarse occluder to z-buffer.
• While the triangle threshold is not exceeded, test
the visibility for the next refinement step and exe-
cute it, if it is visible. Otherwise proceed with the
next refinement step.
• Render the final mesh to the frame-buffer.
In the refinement loop, the occluder should be updated
periodically for a better approximation. On each up-
date, all vertices culled due to occlusion should be
tested against the new occluder again.This ensures
that the geometry, which was occluded by the coarse
approximated occluder can be refined, if it is visible
in the final mesh.
Figure 1: Refinement process.
The whole refinement process is shown in figure 1,
where a ”Dragon” mesh is refined to a coarse level.
This coarse representation is used as occluder in the
further refinement steps. The final mesh will have a
much lower triangle resolution in occluded regions,
compared to the visible parts, after the refinement is
done.
3.3 Reduction of Occlusion Queries
Latencies
Due to the time necessary for the occlusion test, the
algorithm would make the refinement very slow. Es-
pecially large bounding volumes (in screen space) can
require long testing time. This latency-time can be
reduced by making use of parallel threads on CPU
and GPU. We can send multiple queries to the GPU,
which are queued there and are processed one by one.
We choose the number of occlusion queries that are
ADAPTIVE LEVEL OF DETAIL WITH OCCLUSION CULLING
281
queued in the GPU large enough to significantly de-
crease latency times. When one occlusion result is
read from GPU, the further processing of the vertex is
determined with it. A visible bounding volume means
that the occlusion queries for the bounding volumes
of the child vertices are queued in the GPU. When the
number of queued queries on the GPU becomes too
small, we simply add queries from the global refine-
ment queue.
To improve the frame rate, we do not send all
queries to the graphics hardware. To decrease the
number of occlusion queries, we only send queries for
odd hierarchy levels. This hardly lowers the refine-
ment quality but saves half of the occlusion queries.
4 RESULTS
The LOD refinement with occlusion culling has been
tested with different meshes. We determined the ratio
between visible and invisible triangles in the scene,
in order to measure the efficiency. The scene can
be composed of multiple LOD hierarchies, in order
to test the occlusion among meshes. All test scenes
were approximated with a number of 10,000 triangles.
We used two different occluder steps during the re-
finement process. After 300 refinement steps, a very
coarse occluder is rendered to the z-buffer and after
2500 steps, it is updated with a finer version. The us-
age of further occluders was tested, but it did not im-
prove the distribution of triangles in the visible and in-
visible areas. The measured frame rates for the LOD
rendering without occlusion culling were between 26
and 27 fps, while the use of occlusion culling de-
creased the frame rate to slightly above 15 fps (due
to the occlusion query overhead).
The LOD hierarchies of all meshes were created
by half-edge collapses using the Quadric Error Met-
ric (Garland and Heckbert, 1997). The meshes that
were used in the test scenes can be found in table 1.
Table 1: Test meshes.
Name Armadillo Armadillo Rough
Group Planet
Vertices 172,974 518,922 16,777,218
Triangles 345,944 1,037,832 33,554,432
Disc Size 19,7 MB 59,1 MB 1920 MB
The different bounding volumes were tested with
the ”Armadillo” mesh. Due to the queued parallel
processing, the complexity of the tested bounding vol-
umes did not affect the frame rate. The box is ren-
dered with 12 triangles while the sphere is approxi-
mated with 32 triangles and the cylinder with 64 tri-
angles. The best ratio between visible and invisible
triangles was achieved with a cylindrical bounding
volume. The cylinder is oriented along the surface
normal of the according vertex. All geometry that is
associated with the vertex is enclosed by the cylin-
der. The box and the sphere volume always resulted
in more conservative approximations and poorer visi-
bility ratios.
A comparison between view-dependent LOD with
and without occlusion culling can be found in table
2. For each view the the number of visible trian-
gles without (VT
LOD
) and with (VT
OC
) occlusion
culling is shown together with the reached improve-
ment ratio (IR). The total number of triangles which
is used to approximate the whole scene is always
10,000. The results show significant improvements
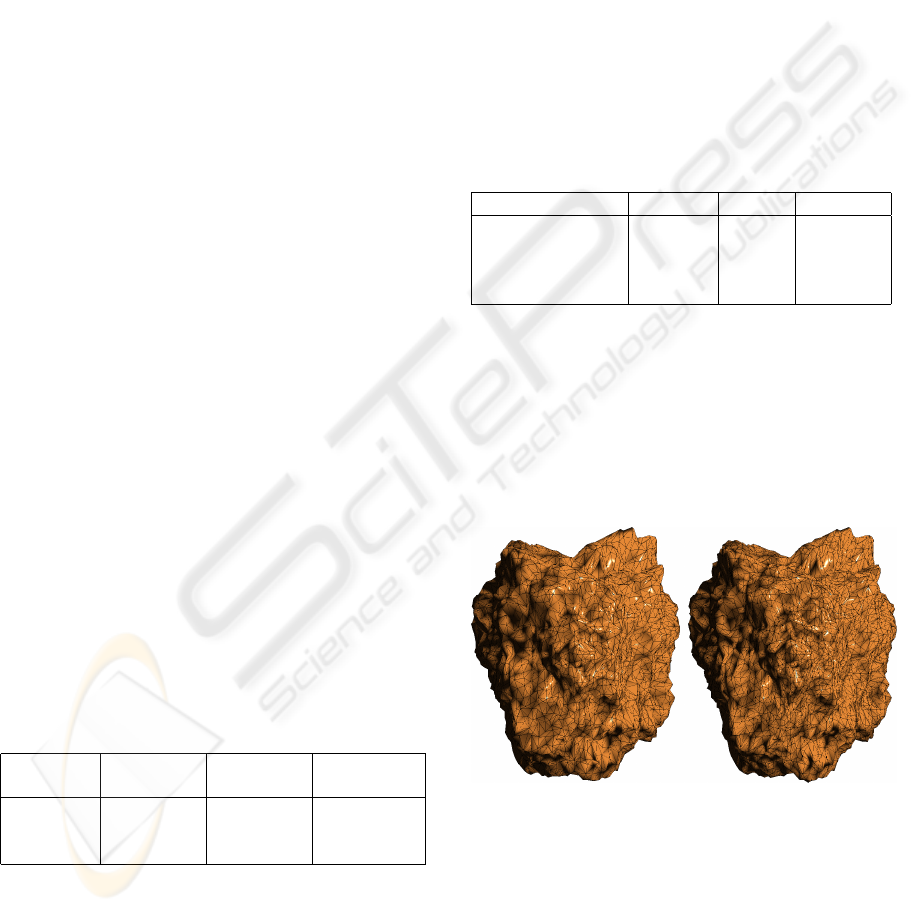
Table 2: Test meshes.
Name VT
LOD
VT
OC
IR
Armadillo 2,277 3,642 59,95%
Armadillo group 2,231 3,733 67,32%
Planet full 3,546 4,781 34,83%
Planet near 1,888 4,623 144,86%
in the distribution of triangles. Many more triangles
are used to approximate the visible parts of the scene
when occlusion culling is integrated. Of course the
improvement ratio depends on the amount of occlu-
sion in the view to be rendered. Views with low oc-
clusion, such as the ”Planet full” view (Figure 2) show
only little improvement.
Figure 2: Full view of the ”Rough Planet” mesh, without
(left) and with (right) occlusion culling.
The relatively high result in this example, however,
can be reasoned with the inefficient backface culling.
Due to the rough surface, the backface culling is
hardly able to influence the refinement process. The
normal cones of the mesh enclose large angles even
in the higher levels of the hierarchy and thus will
be unable to support visibility culling. Occlusion
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
282

culling detects the surface regions on the backside and
culls it efficiently. For smoother surfaces this differ-
ence would narrow itself. A view of the ”Armadillo”
mesh, for instance, shows only improvements below
4% when there is no self-occlusion in view.
Views with heavy occlusion such as in ”Planet
near”, show enormously high improvements. If many
parts of the mesh are occluded, LOD techniques with-
out occlusion culling distribute the available triangles
evenly in both visible and invisible regions. An early
detection of occluded regions during the refinement
process will influence the arrangement of triangles,
and cause higher detail in parts of the view that are
visible.
Figure 3 shows a comparison of the view with and
without occlusion culling. Because the hill in the
front occludes most geometry in the view, standard
view-dependent LOD methods distribute many of the
triangles to invisible regions.
Figure 3: Near view of the ”Rough Planet” mesh, without
(top) and with (bottom) occlusion culling.
Our approach however detects the occluded regions
and uses only few triangles to approximate them. A
birds eye view in figure 4 illustrates the effect of the
occlusion culling. The left image corresponds to the
upper image of figure 3 and the right image to the bot-
tom image of figure 3.It is noticeable that the regions
that are occluded by the hill in the front of the view
(yellow lines), are approximated much coarser than
the visible parts.
A view on the ”Aramdillo” mesh as listed in table 2
is shown in figure 5. The hand in the front occludes
a large region of the mesh and allows us to distribute
more triangles in the visible regions of the view.
Figure 4: Effect of occlusion culling in the approximation
shown in figure 3.
Figure 5: Views of the ”Armadillo” mesh without (left) and
with (right) occlusion culling.
Our last example view is shown in figure 6. Three
instances of the ”Armadillo” mesh are placed one af-
ter another. The instance in the front occludes most
geometry of the two other instances such that many
triangles would be wasted without occlusion culling.
Figure 6: Views of the ”Armadillo Group” without (left)
and with (right) occlusion culling.
The effect of the occlusion culling is illustrated in fig-
ure 7. The regions that are occluded in figure 6 are
coarsely approximated only in the right image. The
saved triangles are distributed to the visible parts of
the meshes.
5 CONCLUSION
In our paper we presented a new way to integrate oc-
clusion culling and view-dependent LOD. The results
show that significant improvements in the distribution
of triangles are possible. Views that contain much oc-
clusion can drastically increase the amount of visible
ADAPTIVE LEVEL OF DETAIL WITH OCCLUSION CULLING
283

Figure 7: Side-views of the ”Armadillo Group” approxima-
tions in figure 6.
triangles. Even in situations with less occlusion, our
approach can support the culling of faces that are ori-
ented away from the viewer but cannot be culled with
backface culling.
The price for the improvement in the rendering-
quality, however, is a 42% drop in the frame rate. The
approximately 5000 occlusion queries, which have to
be done for a reconstruction with 10,000 triangles,
consume a large amount of the frame time, although
they mainly run in parallel to the refinement process.
Our next work will be focussed on the acceleration of
the rendering process.
Another way to increase the frame rate would per-
haps be the use of time coherency. A frame to frame
update of the approximation would likely demand less
occlusion queries, when the view moves slowly.
REFERENCES
Andujar, C., Saona-Vazquez, C., Navazo, I., and Brunet,
P. (2000). Integrating occlusion culling and levels of
details through hardly-visible sets.
Chrysanthou, Y., Cohen-Or, D., and Zadicario, E. (1998).
Viewspace partitioning of densely occluded scenes. In
SCG ’98: Proceedings of the fourteenth annual sym-
posium on Computational geometry, pages 413–414,
New York, NY, USA. ACM Press.
Cignoni, P., Ganovelli, F., Gobbetti, E., Marton, F., Pon-
chio, F., and Scopigno, R. (2004). Adaptive tetra-
puzzles: efficient out-of-core construction and visual-
ization of gigantic multiresolution polygonal models.
ACM Trans. Graph., 23(3):796–803.
Coorg, S. and Teller, S. (1997). Real-time occlusion culling
for models with large occluders. In SI3D ’97: Pro-
ceedings of the 1997 symposium on Interactive 3D
graphics, pages 83–ff., New York, NY, USA. ACM
Press.
Durand, F., Drettakis, G., Thollot, J., and Puech, C. (2000).
Conservative visibility preprocessing using extended
projections. In SIGGRAPH ’00: Proceedings of the
27th annual conference on Computer graphics and in-
teractive techniques, pages 239–248, New York, NY,
USA. ACM Press/Addison-Wesley Publishing Co.
El-Sana, J., Sokolovsky, N., and Silva, C. T. (2001). In-
tegrating occlusion culling with view-dependent ren-
dering. In VIS ’01: Proceedings of the conference on
Visualization ’01, pages 371–378, Washington, DC,
USA. IEEE Computer Society.
Garland, M. and Heckbert, P. S. (1997). Surface simpli-
fication using quadric error metrics. In SIGGRAPH
’97: Proceedings of the 24th annual conference on
Computer graphics and interactive techniques, pages
209–216, New York, NY, USA. ACM Press/Addison-
Wesley Publishing Co.
Greene, N., Kass, M., and Miller, G. (1993). Hierarchical
z-buffer visibility. In SIGGRAPH ’93: Proceedings
of the 20th annual conference on Computer graph-
ics and interactive techniques, pages 231–238, New
York, NY, USA. ACM Press.
Hoppe, H. (1996). Progressive meshes. Computer Graph-
ics, 30(Annual Conference Series):99–108.
Hoppe, H. (1997). View-dependent refinement of progres-
sive meshes. In SIGGRAPH ’97: Proceedings of the
24th annual conference on Computer graphics and in-
teractive techniques, pages 189–198, New York, NY,
USA. ACM Press/Addison-Wesley Publishing Co.
Hoppe, H. (1998). Smooth view-dependent level-of-detail
control and its application to terrain rendering. In
VIS ’98: Proceedings of the conference on Visualiza-
tion ’98, pages 35–42, Los Alamitos, CA, USA. IEEE
Computer Society Press.
Hudson, T., Manocha, D., Cohen, J., Lin, M., Hoff, K., and
Zhang, H. (1997). Accelerated occlusion culling using
shadow frusta. In SCG ’97: Proceedings of the thir-
teenth annual symposium on Computational geome-
try, pages 1–10, New York, NY, USA. ACM Press.
Lindstrom, P. (2003). Out-of-core construction and visu-
alization of multiresolution surfaces. In SI3D ’03:
Proceedings of the 2003 symposium on Interactive 3D
graphics, pages 93–102, New York, NY, USA. ACM
Press.
Prince, C. (2000). Progressive meshes for large models of
arbitrary topology.
Schaufler, G., Dorsey, J., Decoret, X., and Sillion, F. X.
(2000). Conservative volumetric visibility with oc-
cluder fusion. In SIGGRAPH ’00: Proceedings of the
27th annual conference on Computer graphics and in-
teractive techniques, pages 229–238, New York, NY,
USA. ACM Press/Addison-Wesley Publishing Co.
Xia, J. C. and Varshney, A. (1996). Dynamic view-
dependent simplification for polygonal models. In
VIS ’96: Proceedings of the 7th conference on Visu-
alization ’96, pages 327–ff., Los Alamitos, CA, USA.
IEEE Computer Society Press.
Zhang, H., Manocha, D., Hudson, T., and Kenneth E. Hoff,
I. (1997). Visibility culling using hierarchical occlu-
sion maps. In SIGGRAPH ’97: Proceedings of the
24th annual conference on Computer graphics and
interactive techniques, pages 77–88, New York, NY,
USA. ACM Press/Addison-Wesley Publishing Co.
GRAPP 2006 - COMPUTER GRAPHICS THEORY AND APPLICATIONS
284
