
AUTONOMOUS BEHAVIOR-BASED EXPLORATION OF OFFICE
ENVIRONMENTS
Daniel Schmidt, Tobias Luksch, Jens Wettach and Karsten Berns
University of Kaiserslautern (TU)
Gottlieb-Daimler-Straße, 67663 Kaiserslautern, Germany
K
eywords:
Mobile robots, autonomous exploration, behaviour-based, indoor environments.
Abstract:
Besides safe motion control the gain of environmental knowledge is a key for a reliable home or office service
robot. When being set into a completely unknown environment the robot has to be able to derive a certain
abstract internal representation of this world without any user interaction. This knowledge enables the robot
to know how to get from its actual place in one room to a target position in another room as a prerequisite
for transportation tasks for example. In this context, the combination of a behavior-based motion control
system and an abstract topological map based on geometric representations of rooms seems promising. As
the concept of motion and exploration behaviors facilitates to compete with noisy sensor information and
geometrically imprecise maps, it has been used to develop completely autonomous exploration strategies for
deriving topological representations of common indoor environments. The only prescribed world knowledge is
the fact that these environments are composed of rectangular entities (rooms) which are connected by openings
(doors). The developed system has successfully been tested in simulation and reality.
1 INTRODUCTION
Mobile service robots have to derive an internal
representation of their working environment au-
tonomously. When such a machine is installed in its
new habitat, it has to perform a certain initialization
phase for setting up its internal map before the user
can give any orders to it. Of course this map building
has to be executed without any user intervention.
One question is how abstract and accurate this rep-
resentation has to be to facilitate safe robot motion
and reliable task performance. In this paper a new
behavior-based control approach is presented that en-
ables a mobile robot to derive a topological map of
indoor environments completely autonomously. The
realized approach allows to compete with inaccurate
sensor distance information and imprecise mapping
results. The main challenge is the coordination of
the behavioral network in order to guide the robot
autonomously through priori unknown environments
only based on 2D distance information from laser
scanners and the knowledge of rooms being rectan-
gular.
To explain the proposed exploration system the pa-
per is organized as follows: section 2 summarizes pre-
vious work, section 3 introduces the sensor systems
of the applied mobile robot. Section 4 describes the
basics of the environmental representation approach
and section 5 introduces the applied behavior-based
control system. The exploration system is explained
in section 6, followed by test results in section 7. The
project achievements are summarized in section 8 and
supplemented by intended future enhancements.
2 RELATED WORK
Autonomous exploration mainly depends on sophis-
ticated exploration strategies. Common approaches
include heuristic methods which calculate the prob-
ability of new sensor informations at given positions
out of the actual or already retrieved sensor data.
One of such exploration methods is proposed by
(Surmann et al., 2003). It utilizes so-called next-
best-view-algorithms to calculate a position which
promises a maximum of new informations about the
environment. A new measurement is taken only at
this position. Another strategy is pointed out by (Sim
and Roy, 2005), who implemented an exploration
method that tries to minimize the error of the global
235
Schmidt D., Luksch T., Wettach J. and Berns K. (2006).
AUTONOMOUS BEHAVIOR-BASED EXPLORATION OF OFFICE ENVIRONMENTS.
In Proceedings of the Third International Conference on Informatics in Control, Automation and Robotics, pages 235-240
DOI: 10.5220/0001204002350240
Copyright
c
SciTePress
map by integrating the informations collected while
driving a trajectory.
Other strategies have been published before. (Ya-
mauchi et al., 1998) proposed a so-called frontier-
based exploration. Here evidence grids are used
for the detection of unexplored regions and for the
extraction of new exploration targets. A different
method attempts to close virtual chains around two-
dimensional features as (Wullschleger et al., 1999)
published. There an object or room is explored if all
sides have been detected by the robot.
These strategies do not match the mapping sys-
tem in this work (explained in section 4) so a new
behavior-based method has to be created.
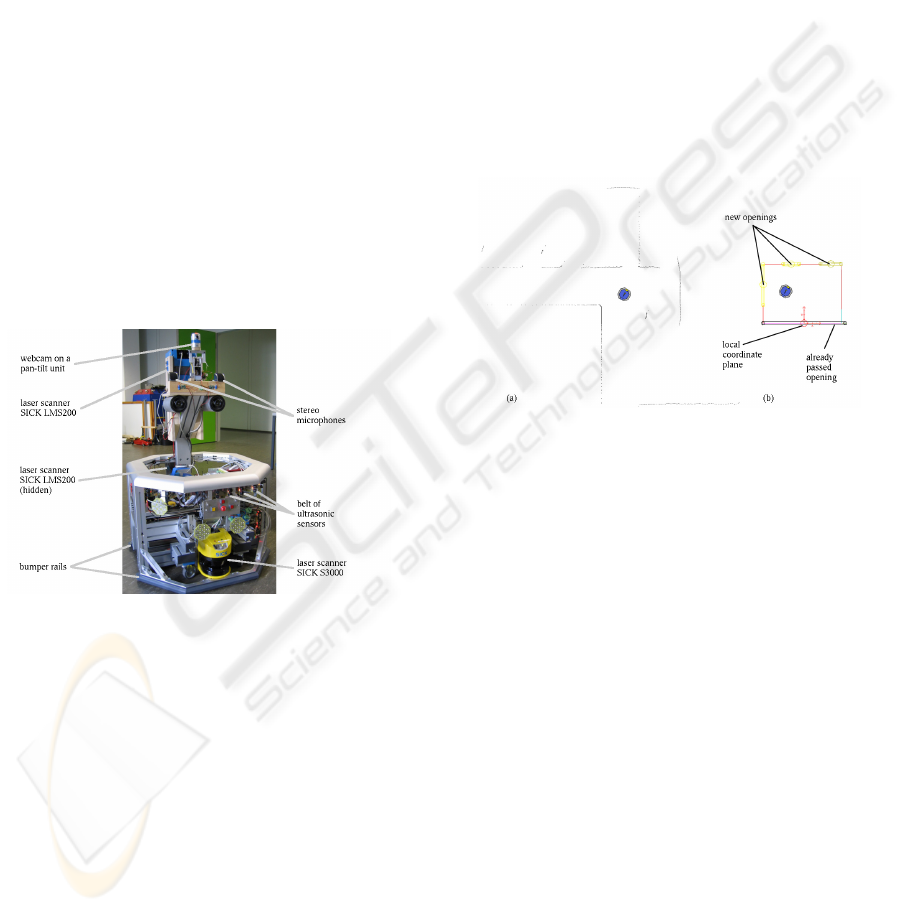
3 MOBILE ROBOT MARVIN
The test bed for the proposed exploration strategy is
the autonomous indoor vehicle Marvin - its sensor
systems are shown in figure 1. Above the bumper
rail for safety aspects two SICK laser scanners are
mounted, one at the front (model S3000) and one at
the back end of the robot (model LMS200).
Figure 1: Front view and sensor system of mobile robot
Marvin.
Above the laser scanners, there is a belt of ul-
trasonic sensors, mounted below the hexagonal top
frame of the robot. The goal of this sensor belt is to
detect obstacles that do not intersect the measurement
plane of the laser scanners, as for example table tops,
which the robot cannot underpass due to its raised arm
(camera holder).
On top of the robot’s arm there is another LMS200
scanner for getting more reasonable measurement re-
sults in highly crowded areas. Soon it will be mounted
on a tilt unit for 3D measurements. Besides the laser
scanner, there are two microphones to detect the di-
rection of sources of noise. Finally, there is a standard
webcam mounted on a pan-tilt unit. It is used for the
detection of human faces, blobs of color and straight
edges in a scene.
4 ENVIRONMENTAL
REPRESENTATION
In this section the recognition and representation of
the environment based on 2D distance information
from the laser scanners is introduced as this is helpful
for understanding the exploration strategy. From the
sensor data an abstract rectangular room consisting of
four walls is generated and openings like doors are
registered as described in (Kleinl
¨
utzum et al., 2005).
The dimensions of the created room comply with the
measured distance information. Figure 2 shows an
example of laser scanner data (a) and the generated
room (b) with an already passed door on the lower
side including the room local coordinate plane and
three additional openings. This example will be con-
tinued in chapter 6.1.
Figure 2: Robot Marvin surrounded by scanner data (a)
and the corresponding map representation (b) (top view).
Regarding this form of description some assump-
tions need to be mentioned:
• All walls inside the rooms are arranged right-
angled.
• Rooms can be described by using rectangles or
combinations of them.
• Walls are fixed inside the environment and cannot
be moved.
Correspondingly the application is limited to rec-
tangular environments as they can be found inside of-
fice buildings. Environments with other shapes will
be approximated by rectangles which may lead to in-
accurate maps of the rooms. These restrictions have
been made to keep the representation as abstract as
possible and to make it more robust against dynamic
changes or other interferences. A topology matrix
specifies the connections between the respective room
maps for navigation tasks.
At the moment a room is defined as well-known if
the robot has explored all walls by travelling closer
than two meters to each part of the walls. This aspect
will change in future when new objects are added to
the map and is reflected in the rating k(R
j
) ∈ [0, 1].
ICINCO 2006 - ROBOTICS AND AUTOMATION
236
5 BEHAVIOR-BASED ROBOT
CONTROL
The basic ideas of the behavior-based robot control
system is subject of this section. Since R. Brooks in-
vented his Subsumption Architecture (Brooks, 1986)
the behavior-based robot control is established as one
of the most powerful systems for controlling a com-
plex robot.
For the implementation of the exploration system
the behavior architecture introduced in e.g. (Albiez
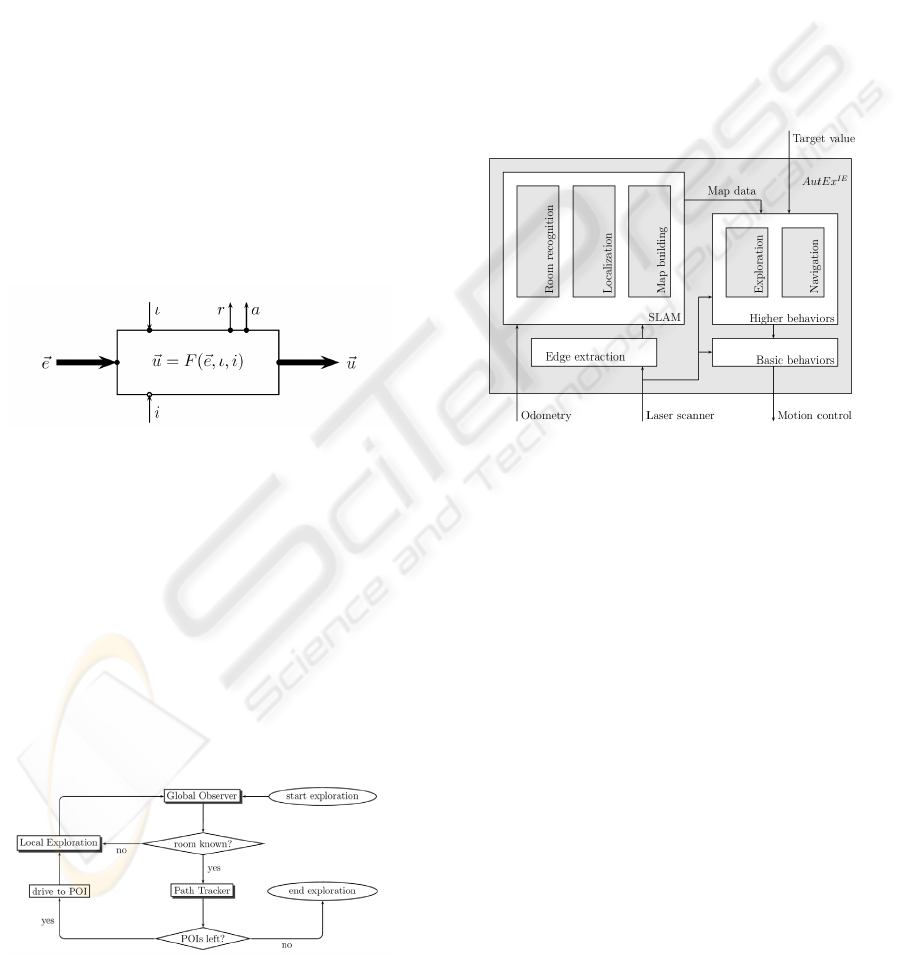
et al., 2003) is used. Figure 3 shows the structure of
a single behavioral module. The input vector e repre-
sents sensor values or preprocessed information from
other modules. This input is transformed by the trans-
fer function F (e, ι, i) into the output u which repre-
sents motion control values or information for other
behaviors. The calculation is influenced by ι which
determines the activation of the module and by the in-
hibiting input i which counteracts the activation. The
outputs a and r represent the module’s activity respec-
tively the target rating (or satisfaction).
Figure 3: Structure of a behavior module.
When several behaviors take effect on the same
control values, their output can be fused using two
different strategies, realized by units denoted as fu-
sion nodes. Both nodes collect the controller outputs
u
i
and activities a
i
of the involved modules and com-
bine them to one control vector u. The maximum fu-
sion forwards the output vector of the behavior with
the highest activity to the fusion output. In contrast
the weighted fusion averages all controller values re-
garding the different activities.
Further information on the architecture can be
found in (Proetzsch et al., 2005).
Figure 4: Process of the global exploration.
6 GLOBAL AND LOCAL
EXPLORATION
This section describes the behavior based exploratory
strategy that enables the mobile robot Marvin to
gain knowledge about complex indoor environments
without any user intervention. The control sys-
tem has been integrated into the AutEx
IE
system
(Autonomous Exploration of Indoor Environments)
as shown in figure 5. This structure contains percep-
tual components for mapping and localization as well
as a behavior-based steering system. It has been in-
troduced in (Kleinl
¨
utzum et al., 2005) and updated to
its current state by (Schmidt, 2006).
Figure 5: Exploration structure of the robot Marvin.
Targeting a hierarchical structure that is easy to up-
grade a control system has been implemented with
different grades of abstraction. The lowest level is
composed of basic behaviors including safety aspects
and simple movements. Exploration behaviors and
additional components are implemented on higher
levels. The main exploration system consists of three
concurrent behaviors:
Local Exploration Collection of simple behaviors
which allow the exploration of the current room.
Path Tracker Drives the robot to the closest point of
interest by using a topological graph.
Global Observer Surveys the
Local Exploration
and
triggers the path tracking behavior, if for a period
of time no new informations have been retrieved.
Figure 4 shows a flowchart of the exploration activ-
ity based on the interaction of these three components.
The idea is to separate the
Local Exploration
which
depends only on laser scanner data and the global ex-
ploration strategy that has access to the more complex
map data. By this means the robot can travel directly
based on sensor informations with a high reactivity.
AUTONOMOUS BEHAVIOR-BASED EXPLORATION OF OFFICE ENVIRONMENTS
237
The
Local Exploration
is mostly responsible for col-
lecting data about the environment. It is surveyed by
the
Global Observer
behavior which can guide the
robot by the
Path Tracker
module to an interesting
point.
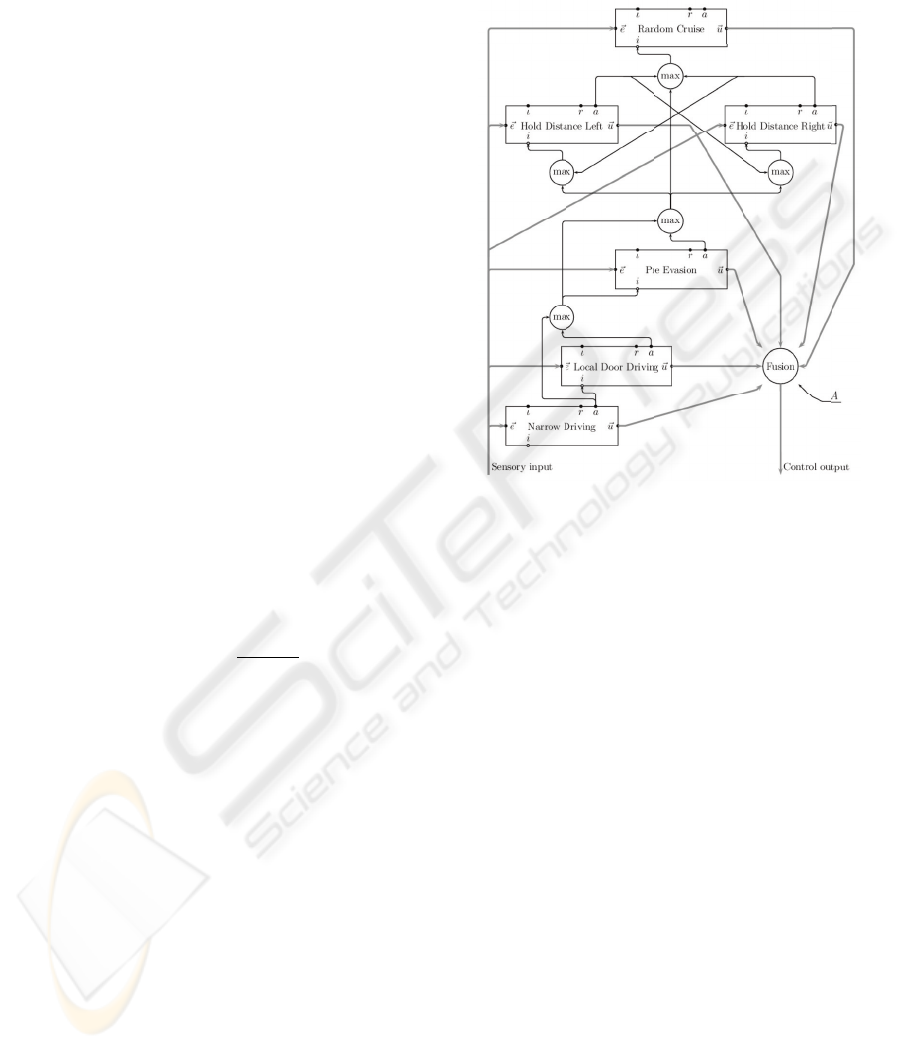
6.1 Local Exploration
The first part that has been implemented is the
Local
Exploration
. It has been realized as a set of different
simple behaviors that compete for the control of the
robot Marvin. From the outside view this group re-
acts like one behavior with the interfaces introduced
in section 5. All included behaviors only produce
turning commands, the forward driving is done au-
tomatically but can be inhibited. The structure of the
Local Exploration
can be seen in figure 6 - the mem-
bers are described in the following:
Random Cruise Simple behavior that drives the ro-
bot in a random direction. The activity is always
a
RC
=1unless it is inhibited by any other active
local behavior - the target rating is set r
RC
=0.
Hold Distance Left / Right Two behaviors which
try to keep a certain distance from obstacles on the
left and the right side equivalent to wall follow be-
haviors. The activity depends on the minimal dis-
tances d to the nearest obstacles and two thresholds
d
l
,d
u
∈ R as seen in equation 1. The target rating
is computed by the needed movement of the robot
r
HD
= |m|.
a
HD
= min
max
1 −
d − d
l
d
u
− d
l
, 0
, 1
(1)
Pre Evasion Turns the robot away from frontal ob-
stacles or towards passages in front of it. Activity
a
PE
and target rating r
PE
are calculated as for the
distance holding behaviors.
Local Door Driving Allows the robot to leave the
current room by turning towards an opening inside
a wall even if this opening is not in front of the ro-
bot. The activity is set depending on the needed
movement m (equation 2), the target rating is set
r
LDD
=0.
a
LDD
=
1 |m| > 0
0 else
(2)
Narrow Driving This behavior is meant for a special
situation that only occurs that way on the real robot.
Inside narrow doorways several behaviors can be
active and counteract each other. Therefore this be-
havior suppresses all other local exploration mod-
ules so that the robot cannot turn and goes straight
ahead driven by the basic behaviours. The activity
a
ND
is calculated in a similar way to the distance
holding behaviors, whereas the target rating is set
r
ND
=0.
Figure 6: Interaction of the local exploration behaviors.
All these simple behaviors enable the robot
to explore a local area by following walls and
travelling through passages and narrow doors.
The activity of this group is determined by the
maximum of the internal activities a
LocExp
=
max(a
RC
,a
HDL
, ..., a
ND
). The target rating
r
LocExp
=1− k(R
j
)
2
is calculated with the know-
ledge rating k(R
j
) ∈ [0, 1] for the current room R
j
.
As sensor input the local exploration behaviors use
an abstraction from the raw laser scanner data. There-
fore the space around the robot is split into several
sectors that reflect spatially discretized distance infor-
mation (denoted as
Robot Sectors
in the following) as
shown in figure 7. These illustrations correspond to
the scanner data and resulting map in figure 2. For
each sector several values are determined:
1. minimal distance of the laser scanner beams inside
the sector
2. maximal and minimal distances to the generated
walls of the current room
3. minimal distance to already passed doors
Depending on different states of the exploration the
local behaviors receive the minimum of 1. and 2. (fig-
ure 7 (a)) to keep the robot inside the room, the min-
imum of 1. and 3. (figure 7 (b)) so that the robot can
leave the room only through an unknown opening or
only the scanner data as shown in figure 7 (c).
ICINCO 2006 - ROBOTICS AND AUTOMATION
238

Figure 7:
Robot Sectors
at different states of the exploration
inside the same room (corresponding to figure 2).
6.2 Global Exploration
In order to explore complex indoor environments
autonomously additional behaviors are needed that
guide the robot from room to room. This task is coor-
dinated by the
Global Observer
module based on the
Path Tracker
(see figure 4 for an overview).
The global exploration strategy works as follows:
The robot starts at an arbitrary position inside its en-
vironment by generating the first room. Then the
Lo-
cal Exploration
becomes active and the robot starts
driving through the surrounding area by using the
laser scanner data until the room is well known. Then
the robot is allowed to leave the room by a local be-
havior that drives it through a narrow opening.
During the local exploration the
Global Observer
surveys the actions and becomes discontented, if no
new information is added to the map within a certain
period of time. So the activity is set a
GO
=1if the
local exploration is active (equation 3).
a
GO
=
1 a
LocExp
> 0
0 else
(3)
The target rating r
GO
can be calculated by using
equation 4 with a counter C that increases if the map
data has not changed since the last check and is reset
otherwise. T
1
,T
2
∈ N define how many cycles are
used for becoming unsatisfied with T
1
>T
2
.Asa
result the local exploration can be longer active inside
poorly known rooms R
j
before the rating becomes
completely unsatisfied (r
GO
=1).
r
GO
= min
1,
C
T
1
− (T
2
· k(R
j
))
(4)
At a maximum of dissatisfaction the
Global Ob-
server
triggers the
Path Tracker
. This behavior cre-
ates points of interest (short: POIs) from the map data
by searching for openings which haven’t been passed
through by the robot or for unknown parts of walls.
Furthermore it constructs a graph that allows the ro-
bot to travel to each point inside every known room.
The closest POI is selected by using the Dijkstra al-
gorithm. When the robot moves along this path the
Path Tracker
stays active, until the target position is
reached. To achieve this a variable t
r
determines if
the robot reached its target or not (equation 5).
a
PT
=1− t
r
(5)
For surveying the robot’s path the
Path Tracker
be-
comes discontented if it cannot reach a point on the
path because of objects onto the point or a closed
doorway. Therefore a counter C
c
increases if the ro-
bot is closer than one meter to the next point and an-
other counter C
i
increases if it is moving away from
the next point. So the target rating (equation 6) is
calculated using these counters and two thresholds T
c
and T
i
.
r
PT
= max
C
c
T
c
,
C
i
T
i
(6)
In the first case the robot accepts the nearly reached
position and turns to the following way point. If the
other case occurs the
Path Tracker
has to change or
delete the actual edge inside the graph and recalculate
a new path from the actual position to the target point.
When reaching the destination the local behaviors
become active again and continue the exploration.
7 TEST RESULTS
The described exploration system has been tested in
simulation as well as on the robot Marvin. For the
simulation the scanner data is generated by using a
manually created map and adding noise to the values.
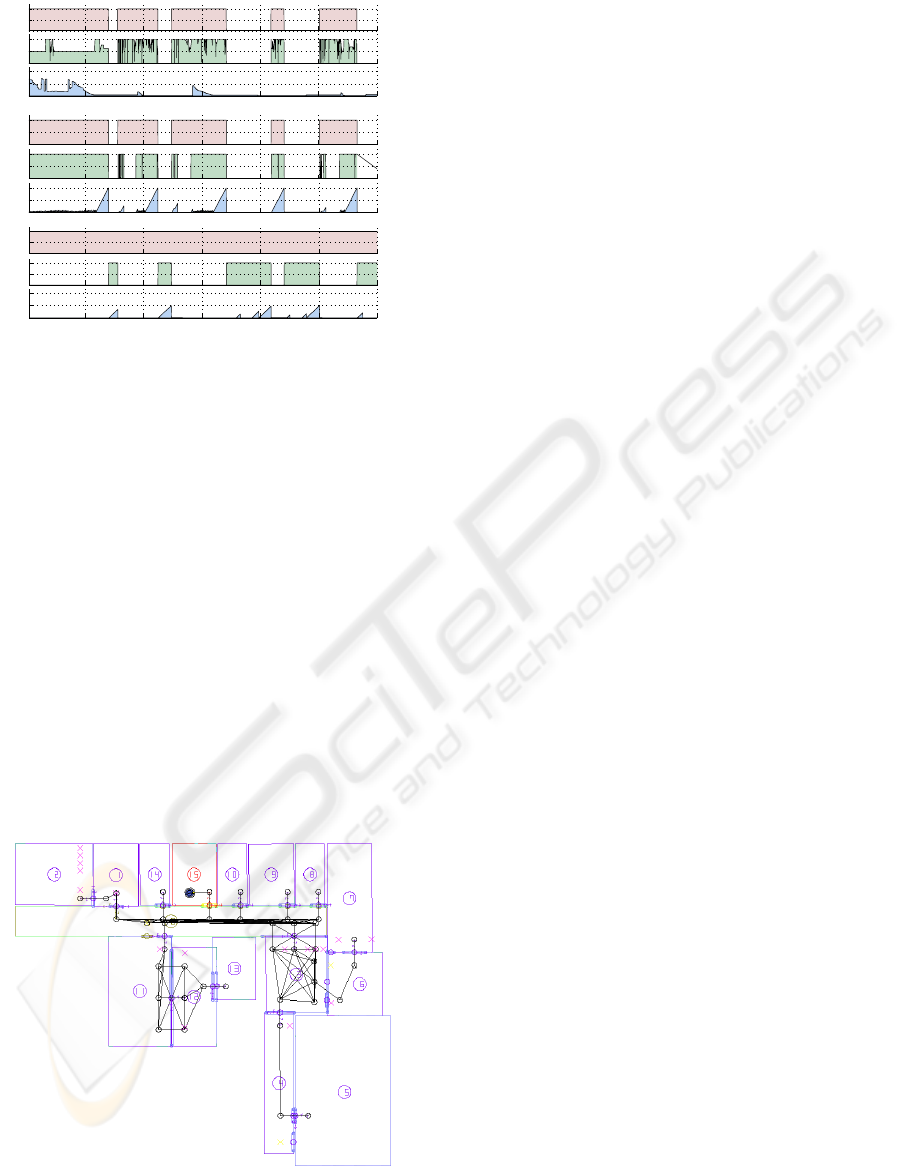
Figure 8 describes the values of the global behav-
iors during the exploration of a simulated office envi-
ronment. The first three rows are the activation ι
Loc
,
activity a
Loc
and target rating r
Loc
of the
Local Ex-
ploration
. Below the values of the
Global Observer
and of the
Path Tracker
module are shown.
It is obvious, that most of the time the
Local Ex-
ploration
is active and controls the robot. During
this simulation run the target rating of the
Local Ex-
ploration
r
Loc
is decreasing while the robot retrieves
more informations about the room. At about sec-
ond 60 the
Global Observer
becomes discontented be-
cause no new information is added to the map. As
the target rating r
GO
reaches its peak the
Local Ex-
ploration
is turned off and the
Path Tracker
starts to
steer the robot to the closest point of interest. Near to
each waypoint the target rating r
PT
increases as the
described counter C
c
is incremented. When the ro-
bot has reached the target position the
Path Tracker
loses its activation and the
Local Exploration
contin-
ues the exploration. This scheme is repeated more or
less frequently. It takes about 20 minutes to explore
the environment as shown in figure 9 with dimensions
of about 28 times 25 meters. The duration strongly
AUTONOMOUS BEHAVIOR-BASED EXPLORATION OF OFFICE ENVIRONMENTS
239
ι
Loc
a
Loc
r
Loc
500 1000 1500 2000 2500 300
0
ι
GO
a
GO
r
GO
500 1000 1500 2000 2500 300
0
ι
PT
a
PT
r
PT
500 1000 1500 2000 2500 300
0
Figure 8: Activities of the applied global behaviors by the
time in
1
/
10
seconds.
depends on the amount of objects inside of the rooms
and the number of narrow passages that slow the robot
down.
In reality this exploration strategy could not be
tested as good as in simulation. The reason for that is
the limited possibility to detect the walls of rooms, if
the sight to them is disturbed by objects on the floor.
Therefore the real experiments have taken place in-
side an empty corridor similar to the one inside of
the simulation. For these exploration runs only the
local strategies excluding the door driving behavior
have been used because of the limitations which are
linked to mapping problems. Separately the other be-
haviors like
Path Tracker
or the
Local Door Driving
have been tested as well and promise good results for
global exploration in reality.
Figure 9: Autonomously explored simulated environment
with navigation graph.
8 CONCLUSION
This paper introduced a hierarchical behavior-based
exploration system. Three main components are
shown and validated in simulated and real experi-
ments: The
Local Exploration
to explore the current
region, a
Path Tracker
behavior for navigation tasks
and a
Global Observer
to fulfill a global strategy.
Future Work will mainly consist of an enhance-
ment of the room recognition methods and the inte-
gration of more sensors. Furthermore the mapping
itself could be upgraded by integrating new map ob-
jects. At last additional exploration behaviors will fol-
low that utilize sensors like microphones, cameras or
ultrasonic sensors.
REFERENCES
Albiez, J., Luksch, T., Berns, K., and Dillmann, R. (2003).
A behaviour network concept for controlling walking
machines. In 2nd International Symposium on Adap-
tive Motion of Animals and Machines (AMAM),Ky-
oto, Japan.
Brooks, R. (1986). A robust layered control system for a
mobile robot. IEEE Journal of Robotics and Automa-
tion, RA-2(1):14–23.
Kleinl
¨
utzum, K., Luksch, T., Schmidt, D., and Berns, K.
(2005). Selbstst
¨
andige erstellung einer abstrakten
topologiebasierten karte f
¨
ur die autnome exploration.
In Autonome Mobile Systeme (AMS) 2005. (in ger-
man).
Proetzsch, M., Luksch, T., and Berns, K. (2005). Fault-
tolerant behavior-based motion control for offroad
navigation. In 20th IEEE International Conference on
Robotics and Automation (ICRA), Barcelona, Spain.
Schmidt, D. (2006). Entwicklung einer verhaltensbasierten
steuerung zur autonomen exploration in strukturierter
umgebung von einem indoor-roboter. Diploma thesis
(in german), unpublished, Robotics Research Labora-
tory - Kaiserslautern University of Technology.
Sim, R. and Roy, N. (2005). Global a-optimal robot explo-
ration in slam. Technical report, Department of Com-
puter Science, University of British Columbia.
Surmann, H., N
¨
uchter, A., and Hertzberg, J. (2003). An au-
tonomous mobile robot with a 3d laser range finder for
3d exploration and digitalization of indoor environ-
ments. In Robotics and Autonomous Systems, pages
181–198. Elsevier B.V.
Wullschleger, F., Arras, K., and Vestli, S. (1999). A flexible
exploration framework for map building. Technical
report, Institute of Robotics, Swiss Federal Institute
of Technology ETHZ.
Yamauchi, B., Schultz, A. C., and Adams, W. (1998). Mo-
bile robot exploration and map-building with continu-
ous localization. In Proceedings of the 1998 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages pp. 3715–3720, Leuven, Belgium.
ICINCO 2006 - ROBOTICS AND AUTOMATION
240
