
iCricket: A Programmable Brick for Kids’ Pervasive
Computing Applications
Fred Martin, Kallol Par, Kareem Abu-Zahra, Vasiliy Dulsky and Andrew Chanler
University of Massachusetts Lowell,
Computer Science Department, Engaging Computing Group,
1 University Avenue, Lowell MA 01854 USA
Abstract. The iCricket is a new internet-enabled embedded control board with
built-in motor and sensor interface circuits. It is designed for use by pre-college
students and other programming novices. It includes a Logo virtual machine with
extensions that allow networked iCrickets communicate with one another, retriev-
ing sensor values and remotely running each other’s Logo procedures. The un-
derlying implementation uses standard HTTP protocols. The iCricket’s key con-
tribution is that it will allow programming novices (children, artists, and other
non-engineers) to implement pervasive computing applications with an easy-to-
use, interactive language (Logo). This paper focuses the iCricket hardware and
software design. Later work will evaluate results of using the design with various
users.
1 Introduction
There is a long history of construction toys for use by children, to encourage their
creativity and inventiveness [1]. In the computer age, researchers developing program-
mable materials for children generally use one of two approaches. Early work, led by
Seymour Papert at the MIT AI Laboratory, was explicitly based on programming. The
Logo language was developed to give children a way to express their ideas in code; the
leading application was making drawings using commands to a virtual or physical robot
“turtle” [2].
Recent work provides children with a form of implicit programming, also known
as “programming by example.” Phil Frei’s curlybot was inspired by the Logo turtle,
but children programmed it by moving it directly on a table with their hand. The ro-
bot recorded their gesture and then played it back with various permutations [3]. The
Topobo project takes inspiration from curlybot but allows children to build their own
mechanical bodies, with any joint having a similar form of record-and-playback pro-
grammability [4].
Because of its pedagogical value, we base our work on the former of these two
approaches. Children’s programs become a symbol-based representation of their inten-
tions. These representations then act as mediators in their learning experience [5].
Our earlier work includes development of the MIT Programmable Brick, the Handy
Board, and the Cricket. These technologies have been used for everything from ele-
Martin F., Par K., Abu-Zahra K., Dulsky V. and Chanler A. (2005).
iCricket: A Programmable Brick for Kids’ Pervasive Computing Applications.
In Proceedings of the 2nd International Workshop on Ubiquitous Computing, pages 75-81
DOI: 10.5220/0002574100750081
Copyright
c
SciTePress

mentary children’s construction of science experiments to graduate level robotic design
courses [6–9].
In this paper, we introduce the iCricket, the latest in a series of microcontroller
boards designed for use by children, teachers, hobbyists, and researchers.
1.1 Motivations
Over the last 10 years, light-weight TCP/IP stacks have started to appear in embedded
devices, including commercial products [10,11]. These are based on an inexpensive
8- or 16-bit CPUs with custom TCP stack code. Our goal in designing the iCricket
is to create a platform that allows children and other programming novices to create
applications that use pervasive computing technology.
1.2 Why the iCricket?
Designing a new board is not the only way to make pervasive computing accessible to
novices. Alternately, we could have developed programming environments for a more
powerful embedded device (e.g., a PDA with a wireless card) or used existing TCP-
enabled devices (e.g., Dallas-Maxim’s TINI product [11]).
Partly, we chose to build on our previous work since the Logo language is accessible
to children [12], and allows them to interactively design and program their own sensor
and motor control systems [13]. Also, we had specific goals for the iCricket device:
– Integrating motor/sensor circuitry. No existing commercial device includes jacks
for connecting DC motors and simple analog sensors. The design of the iCricket
means that kids and other hardware novices can build functioning systems without
needing knowledge of electronics.
– Extensions to the Logo language that support meaningful and easy-to-use com-
munication between peers. Much of our work on the iCricket is contained in the
new Logo communications primitives. With just a few lines of code, an iCricket
programmer can link sensors on one iCricket to motors on another.
– Minimal hardware design cost. When developing code on the iCricket, the user
takes advantage of the keyboard, screen, and overall computational power of a con-
ventional desktop or laptop PC. The user’s code is then compiled into Logo byte-
codes for the iCricket. This arrangement lets the iCricket itself be a very simple and
inexpensive device.
– Integrated TCP/IP communications. Standard network protocols, such as HTTP, let
iCrickets communicate with one other and conventional web services.
In an important sense, the iCricket’s contribution is a “whole that is greater than
the sum of its parts.” Individually, the pieces of the iCricket (a programmable brick,
the Logo language, an embedded stack) are not new. But taken as a whole system,
our intention with the iCricket is to make the ideas of the research community readily
accessible to a wide range of users, who otherwise would not have an opportunity to
participate in this work.
76
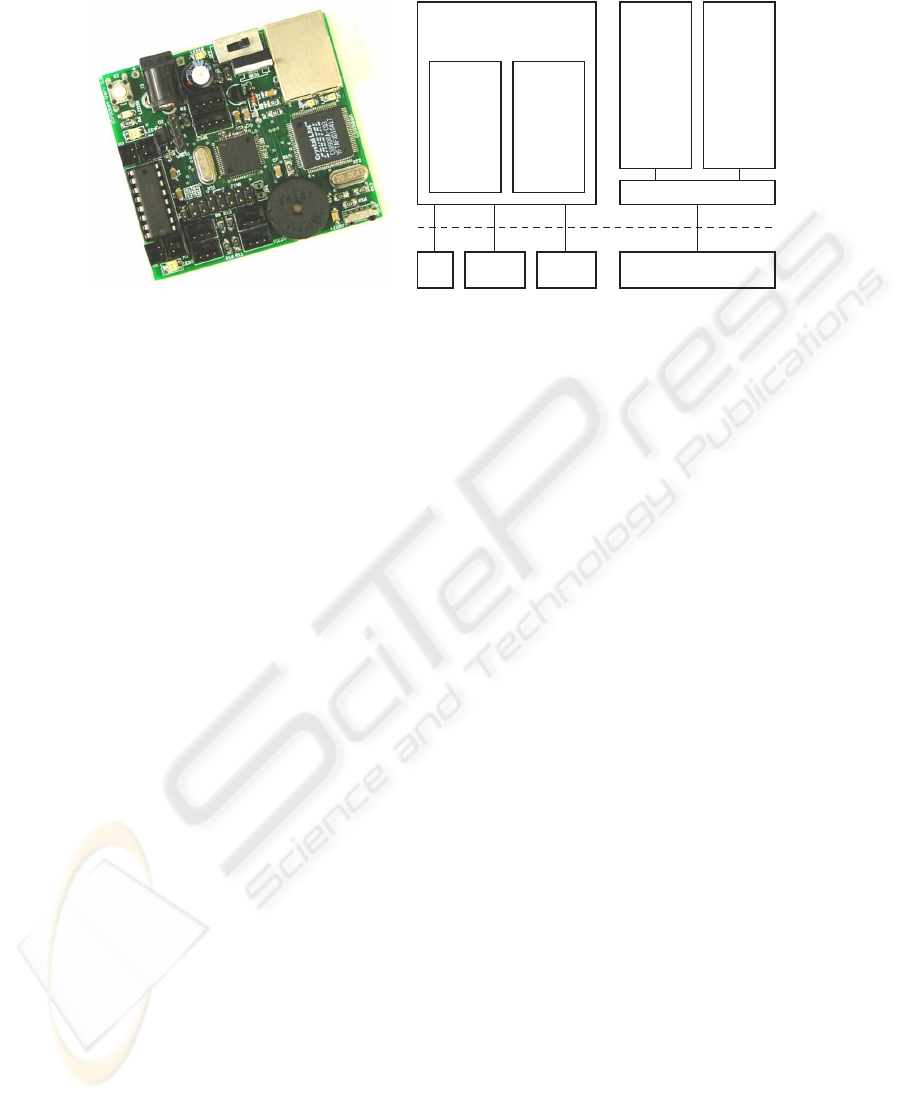
software
hardware
HTTP
Server
Cricket Logo
Virtual Machine
HTTP
Client
User
Process
System
Process
IR motor sensor CS8900 NIC chip
utility routines
• generates
reply content
by executing
Logo code in
VM System
Process
• makes
connection to
other iCricket
• launched
by call from
User
Process
• foreground
app code
controlling
project
• separate
space for
TCP system
to execute
Logo proc’s
Fig.1. The iCricket Microcontroller and Block Diagram
From a technical standpoint, the iCricket’s central innovation is its interface be-
tween the Logo language and the TCP stack. As is described in the following, we have
created a remote procedure call-like mechanism that allows iCrickets to execute each
other’s procedures. Also, we developed a call-back mechanism that allows the built-in
web server to transparently execute Logo procedures in order to generate server reply
content.
2 Hardware
The iCricket is closely modeled after the Handy Cricket [14], a commercial version of
the MIT Media Lab Cricket [15]. (Please note that the work described in this paper has
no connection to the MIT CSAIL “Cricket Indoor Location System.”)
Figure 1 (left) shows the iCricket device. It is based on Texas Instruments’ MSP430
microprocessor, a low-cost 16-bit CPU with a 64k address space and good on-chip
peripherals. We use the ’F149 variant, which has 60k of internal flash and 2k of inter-
nal RAM. The CPU is coupled with the Crystal Semiconductor CS8900 ISA ethernet
adapter chip for 10BT networking. We chose this pair of devices for their ease-of-use,
including the availability of prototyping hardware and TCP/IP sample code [16].
The iCricket includes outputs for two DC motors, inputs for four analog sensors
(with powered sensor ports), IrDA communications, a piezo beeper, and a JTAG con-
nector (for development purposes). It also has a connector for the “Cricket Bus,” a
custom 1-wire bus that allows a single iCricket to control a number of locally-attached
slave devices [15].
3 Software
Figure 1 (right) illustrates the software running on the iCricket device. The primary
subsystems are the Logo Virtual Machine, HTTP Server, and HTTP Client. The HTTP
client and server are based on Adam Dunkels’ uip code [17].
77

3.1 Logo Virtual Machine
The Logo Virtual Machine (VM) is a stack-based, byte-coded interpreter with 16-bit
integer numerals and support for procedures (including arguments, return values, and
recursion). The VM includes primitives for interacting with the iCricket’s sensor ports,
motor outputs, and local IR communications [15].
The iCricket extends previous Cricket VMs by introducing two parallel Logo threads.
The User Process runs the application code that would control an iCricket project—e.g.,
taking sensor readings and controlling local motor outputs based on them. The System
Process is a separate execution area that is used by the HTTP Server and Client to
execute Logo procedures as part of their operation.
The iCricket VM adds public global variables (called xglobals) and public proce-
dures (called xdo’s) which can be accessed by the Client/Server system.
3.2 HTTP Server
When responding to incoming connection requests, the iCricket’s HTTP Server has
two primary functions. First, it processes the message supplied by a client (another
iCricket or any web browser). This may contain requests to execute procedures and/or
set variable values. Then, it constructs a reply packet, which announces the values of
all of its xglobal variables and contains custom content generated by Logo code.
For background, consider the embeddable HTTP server code presented by Jones
in a 2001 article [18]. This server supported “dynamic content in HTML files with an
API to provide the content.” In this design, a new tag, <DATA x>, was used to insert
dynamic content into the HTML stream. The parser searched for the DATA keyword,
then used the embedded variable name to retrieve the actual content.
The iCricket takes this further. We generate reply content by having the HTTP
Server make a callback to a specially-named Logo procedure (answer) that is pro-
vided by the Logo application programmer. Thus, the iCricket not only reports variable
values (the xglobals), but also allows arbitrary Logo procedures to execute and supply
response data.
The answer procedure itself contains a series of calls to a reply primitive. These
build up a table of name-string/integer-value pairs in a RAM-based table. When the
answer procedure concludes, control returns to the HTTP Server and the table is ex-
ported, producing the reply content.
This design allows the user to create custom reply content by writing just a few lines
of Logo code. If an iCricket has a temperature sensor plugged into its sensor A port, it
can publish the sensor’s value with:
to answer
reply "temperature sensora
end
The server reply itself is an XML file which can be viewed in a web browser and
parsed by another iCricket’s HTTP Client. For example, the answer procedure above
would produce XML like:
78

<?xml version="1.0"?>
<icricket>
<r n="temperature" v="68"/>
<g n="xglobal1" v="0"/>
</icricket>
The “r” tag indicates a value reported by the reply primitive. Xglobal variables de-
clared in the user’s code are automatically published in the XML reply; these are indi-
cated by the “g” tag.
3.3 HTTP Client
The HTTP Client allows one iCricket to connect to another iCricket. The Client sends an
HTTP request with the GET syntax (e.g. “GET index.xml?xglob1=0&fan=1”).
Here, the Server iCricket would set its xglob1 to 0 and then would execute its pro-
cedure fan with an argument of 1. The Server then sends back an XML reply that the
Client will parse.
The Client’s actions are scripted with two Logo primitives. The tell primitive
accepts a name-string and integer-value; these are built up in a command table. The
talk primitive initiates communication with the remote iCricket. It uses the command
table to generate the HTTP GET request and then sends it to the given IP address.
The Client then receives the Server’s XML reply and parses it into another table.
Two Logo primitives, reply? and getreply, examine this table. Respectively, they
test for the existence of a name-string and return its value.
4 The iCricket IDE and Application Examples
To build applications with the iCricket, the programmer runs the iCricket IDE on a
normal PC or Mac. The IDE includes a compiler (which translates the programmer’s
Logo into bytecodes), a downloader (for installing the bytecodes into the iCricket), and
a command console (to run code interactively on the iCricket).
The command console is the primary way for interacting with an iCricket. Here,
the user can type commands, and they are immediately compiled, downloaded, and
executed. This gives the iCricket the flavor of an interactive system. Also, the user can
print debug information, which is displayed in the IDE.
Suppose a user wishes to create a thermostat project with two iCrickets: a “Temp
iCricket” (has a temperature sensor) and a “Fan iCricket” (controls a fan). This can be
done at least two ways: a polling method, in which the Fan iCricket asks the Temp
iCricket for temperature readings, and an interrupt method, where the Temp iCricket
issues commands to the Fan when the temperature changes.
Let’s look at the polling method first. The
Temp iCricket needs to report its temper-
ature reading. The way to do this is to
have it report the temperature in its an-
swer procedure:
to answer
reply "temp sensora
end
79

To test if this is working, the user can connect to the iCricket from a standard web
browser. This would yield a XML file that looked like the example shown earlier, re-
vealing the iCricket’s local temperature measurement.
Next, the code for the Fan iCricket is
constructed. It has a procedure named
startup (which automatically runs
when the iCricket is powered on) that
repeatedly polls the Temp iCricket, and
based on the temperature, decides to turn
the fan on or off:
to startup
talk "temp-IP-addr
ifelse getreply "temp > 70
[a, on][a, off]
startup
end
Alternately, an interrupt method can be employed.
Based on the local temperature reading,
the Temp iCricket tells the fan to turn on
or off. To allow itself to be commanded,
the Fan iCricket provides an xdo proce-
dure:
xdo fan :n
ifelse :n = 1
[a, on][a, off]
end
The xdo procedure can be interactively
tested from the iCricket IDE. After it
is working, the Temp iCricket is pro-
grammed. It uses the waituntilprim-
itive to wait until a temperature threshold
has been crossed, and then sends the ap-
propriate on/off command to the Fan:
to startup
waituntil [sensora > 70]
tell "fan 1
talk "fan-IP-addr
waituntil [sensora < 70]
tell "fan 0
talk "fan-IP-addr
startup
end
5 Discussion and Future Work
The iCricket system provides simple and effective way to implement pervasive com-
puting applications. Sensors and actuators can easily be connected to the internet, and
multiple iCrickets can coordinate their actions.
As of this writing, the iCricket system as described is functional. From a technical
standpoint, our future work plan includes augmenting basic internet services (DHCP;
DNS), manufacturing a larger set of prototypes, and building more demos. Also, we
plan a middleware layer that would run on conventional computers, interfacing iCrick-
ets with internet services in general.
More broadly, our research focus is the pedagogical value of the iCricket when it
is used by children and other programming novices. By giving children the opportunity
to work with this new technology, we will study its effectiveness as a design tool for
children, its impact on their attitudes toward technology, and its value in encouraging
imaginative applications.
We are planning a variety of venues for bringing the technology to children, includ-
ing programs in school, after-school, and with community partners.
80

We also plan to make iCrickets available to the research community. Please connnect
to our live demo at icricket.cs.uml.edu and give us feedback.
References
1. Petroski, H.: Back to the future. Prism 9 (2000)
2. Papert, S.: Mindstorms: Children, Computers, and Powerful Ideas. Basic Books (1980)
3. Frei, P., Su, V., Mikhak, B., Ishii, H.: curlybot: designing a new class of computational
toys. In: CHI ’00: Proceedings of the SIGCHI conference on Human factors in computing
systems, ACM Press (2000) 129–136
4. Raffle, H.S., Parkes, A.J., Ishii, H.: Topobo: a constructive assembly system with kinetic
memory. In: CHI ’04: Proceedings of the 2004 conference on Human factors in computing
systems, ACM Press (2004) 647–654
5. Ackermann, E.: Direct and mediated experience: Their role in learning. In Lewis, R.,
Mendelsohn, P., eds.: Lessons from Learning. Proceedings of the IFIP TC3/WG3.3 Working
Conference (1993)
6. Martin, F.: Children, Cybernetics, and Programmable Turtles. Master’s thesis, Massachusetts
Institute of Technology, Cambridge, MA (1988)
7. Martin, F.: Circuits to Control: Learning Engineering by Designing LEGO Robots. PhD
thesis, Massachusetts Institute of Technology, Cambridge, MA (1994)
8. Martin, F.: Robotic Explorations: A Hands-On Introduction to Engineering. Prentice-Hall
(2000)
9. Resnick, M., Berg, R., Eisenberg, M.: Beyond black boxes: Bringing transparency and aes-
thetics back to scientific investigation. Journal of the Learning Sciences 9 (2000) 7–30
10. Inc., N.: SitePlayer Embedded Internet Server, NetMedia Inc: www.siteplayer.com
(2005)
11. Products, M.I.: TINI (Tiny InterNet Interface), Dallas Semiconductor/Maxim Inc: www.
maxim-ic.com/TINIplatform.cfm (2005)
12. Kafai, Y.: Learning through making games: Children’s development of design strategies in
the creation of a computational artifact. In Kafai, Y., Resnick, M., eds.: Constructionism in
Practice. Lawrence Erlbaum Associates (1996) 71–96
13. Martin, F., Mikhak, B., Resnick, M., Silverman, B., Berg, R.: To mindstorms and beyond:
Evolution of a construction kit for magical machines. In Druin, A., Hendler, J., eds.: Robots
for Kids: Exploring New Technologies for Learning. Morgan Kaufmann (2000) 9–33
14. Martin, F.: The Handy Cricket: handyboard.com/cricket/ (2005)
15. Martin, F., Mikhak, B., Silverman, B.: Metacricket: A designer’s kit for making computa-
tional devices. IBM Systems Journal 39 (2000)
16. Dannenberg, A.: MSP430 Internet Connectivity. Technical Report SLAA137A, Texas In-
struments (2004)
17. Dunkels, A.: Full TCP/IP for 8-Bit Architectures. In: Proceedings of MOBISYS 2003, San
Francisco, CA (2003)
18. Jones, M.T.: An Embeddable HTTP Server: Web-enabling embedded devices. Dr. Dobbs
Journal (2001)
81
