
Inductive String Template-Based Learning of Spoken
Language
Alexander Gutkin and Simon King
Centre for Speech Technology Research, University of Edinburgh
2 Buccleuch Place, Edinburgh, EH8 9LW, United Kingdom
Abstract. This paper deals with formulation of alternative structural approach to
the speech recognition problem. In this approach, we require both the represen-
tation and the learning algorithms defined on it to be linguistically meaningful,
which allows the speech recognition system to discover the nature of the linguis-
tic classes of speech patterns corresponding to the speech waveforms. We briefly
discuss the current formalisms and propose an alternative — a phonologically in-
spired string-based inductive speech representation, defined within an analytical
framework specifically designed to address the issues of class and object repre-
sentation. We also present the results of the phoneme classification experiments
conducted on the TIMIT corpus of continuous speech.
1 Introduction
One of the issues often neglected during the design of the speech recognition systems
is the issue of whether the learning method can actually discover the representation
of the class of patterns in question, in other words, to attempt to derive the structural
make-up of the patterns which would allow to form some “idea” about the observed
acoustic sequence. The representation is better to be structural simply because the use
of vector spaces for modeling does not allow to go beyond construction of hyperspaces
which are semantically uninformative. In Sect.2 we provide the formulation of some
of the requirements for such representations based on the requirements of the inductive
learning process, put forward in [1]. We require such a representation to be linguistically
meaningful (interpretable) and provide means of inductive class-description (potentially
being able to generate new objects belonging to the class).
In Sect. 3 we give an outline of a rigid structural representation, given by a pseudo-
metric space, a pair consisting of a set of phonological templates plus some dissim-
ilarity measure defined on them. We choose to base our analysis on the concept of
distinctive phonological features — the fundamental unit of linguistic analysis. In an-
alytical terms, this concept is necessary for fully and economically describing various
phonemic properties of speech. We also assume that these features can be reliably re-
covered from the acoustics, the assumption supported by the recent encouraging results
reported in speech recognition literature [2–4]. Finally, we view the pattern recognition
models recovering this information from speech as structure detectors. The procedure
of recognizing unseen patterns in the symbolic space is therefore conducted by tem-
plate matching using symbolic metric algorithms [4]. It can be readily verified, that the
Gutkin A. and King S. (2005).
Inductive String Template-Based Learning of Spoken Language.
In Proceedings of the 5th International Workshop on Pattern Recognition in Information Systems, pages 43-51
DOI: 10.5220/0002568800430051
Copyright
c
SciTePress

object representation with the set of dissimilarity metrics operating on the objects thus
defined, is not meaningful in artificial intelligence terms. Firstly, it does not provide us
with any means of class description (normalized edit distance between the templates,
for instance, does not furnish us with any understanding of the structural makeup of the
particular class of phones in question). Moreover, even if we learn the optimal weights
for the dissimilarity measures from the training data (thus achieving better separation
between the classes), we would still not be able to learn anything about what makes the
phones structurally different, in other words their nature. Obviously, in this context, the
generativity criterion is not satisfied either.
The above limitations of the rigid representation can be eliminated by casting the
problem into the Evolving Transformation Systems (ETS) formalism, as demonstrated
in Sect. 4, where an inductive speech representation is outlined. The transition is ac-
complished by augmenting the rigid representation, described above, with the analytical
machinery necessary for the representation to become inductively meaningful. The ETS
formalism has been specifically developed to address the needs of an inductive learn-
ing process [5,6]. One the central ideas of this formalism is that the similarity measure
plays the critical role in the definition of a class [6] via capturing the compositional
makeup of objects. We chose not follow too formal an exposition, basing the exposition
on [7, 1] (more formal approach is taken in [5]). With help of this formalism we are able
to discover the inductive string-based structure of various classes of phonemes.
Experiments conducted on the TIMIT corpus of continuous speech are described
in Sect. 5. We conclude the paper in Sect. 6 and discuss future research work aimed
at improving our representation and rectifying some of the problems with the existing
approach.
2 Problem Formulation
Given a finite set C
+
of positive training objects that belong to a (possibly infinite) set
C (concept) to be learned and a finite set C
−
of negative training objects that do not
belong to the concept C, find an analytical model that would allow one to construct the
class representation and, as a consequence, to recognize if the new element belongs to
C. In other words, on the basis of a finite training set C
+
∪C
−
such that C
+
∩C
−
= ∅,
where ∅ is an empty set, the agent must be able to form an “idea” of the inductive
generalization corresponding to the concept C.
The structure of a class is taken to be:
1. The symbolic features that make the objects of the same class similar to each other
and/or different from other objects outside the class.
2. The emergent combinative interrelationships among these features.
The inductive learning process would then involve the discovery and encoding of the
structure of the class allowing to abstract (generalize) and associate meaning with the
set of objects. In the consequent recognition stage, the induced dissimilarity measure is
used to compare a new object to some fixed and reduced set of objects from C
+
.
44

3 Basic Phonological Object Representation
The lowest (closest to acoustics) level of linguistic hierarchical representation of an
utterance is usually represented by phonological distinctive features [8], which are seen
in various phonological theories as the atomic units fully and economically describing
the phonemic inventory of any given language. Phonemic inventory (usually consisting
of a few dozen categories), in turn, is used to describe the possibly unlimited range of
sounds (phones or segments) encountered in spoken language. Any phoneme is seen
as minimal contrastive sound unit of a language (two phones are different phonemes
if they produce phonological contrast), is thus represented as a bundle of simultaneous
atomic units, the sum of properties of which makes a phoneme. The distinctive features
used in this work are multi-valued. Each of the N features takes one of the several
possible values — for example, manner of articulation is one of: approximant, fricative,
nasal, stop, vowel, silence.
While at present we cannot extract structural information from the waveforms, there
is a feasible alternative which appears to be a reasonable way to proceed. In approach
described in [3], phonological feature recovery from speech waveforms is performed
by time-delaying recurrent neural networks whose activation values are interpreted as
probabilities of certain features being present in the sound corresponding to the current
frame. Since each probability measurement recovered in this way has a direct linguistic
interpretation, we assume that this numeric measurement corresponds to a certain lin-
guistic fact and can thus be represented symbolically, turning the neural networks into
an effective structural/logical detector. An algorithm described in [4], was used to map
the continuous activation values of the neural networks into the symbols, using simple
quantization over N separate finite alphabets of equal size for each of the N values
separately.
Once the speech has been transformed into a sequence of vectors of symbols, it
can be seen as a sequence of symbolic matrices, each identifying a phone in terms of
its distinctive phonological features. A phone realization (token) p of class (type) P ,
p ∈ P , is thus represented as
f
t
p
1
f
t
p
+1
1
. . . f
t
p
+k
p
−1
1
f
t
p
2
f
t
p
+1
2
. . . f
t
p
+k
p
−1
2
. . . . . . . . . . . .
f
t
p
N
f
t
p
+1
N
. . . f
t
p
+k
p
−1
N
→
t
where t
p
is the start time, k
p
is the duration of p in frames and N is the fixed number of
distinctive phonological feature-values which henceforth will be referred to as streams.
Each of the five features has multiple possible values and hence multiple corresponding
streams.
This representation has a number of attractive features. It accounts for duration and
contextual effects. Since the durations of tokens vary, even within a class, templates
of various durations can be used for a given class. Aspects of co-articulation (such as
assimilation, described above) can be accounted for, since the features are represented
explicitly and independently. They can change value anywhere within a given template.
45
Finally, this representation is amenable to human examination since its components
have explicit linguistic interpretations.
Once the structural representation is obtained by means of quantization of neural
network outputs, the next step is to define a dissimilarity measure between pairs of
templates, or between a template and a token to be classified. An assumption made
in [4] is that the streams are entirely independent of one another and all have equal
importance. For a single token, each stream is a string of symbols from one of the
corresponding alphabets.
Figure 1 shows a simple representation for the two-class problem consisting of /p/
and /b/ consonants, for each of which two realizations are available. Each template
consists of three independent distinctive feature streams (over a three-symbol alphabet)
from the SPE features system defined in [9]. The three symbols can be interpreted as
feature being absent from the makeup of the phone (low), feature undergoing a transi-
tion (mid) and feature being present (high).
[Consonantal]
[Sonorant]
[T ense]
p
1
/b/
p
2
/b/
p
1
/p/
p
2
/p/
high
low
mid
Fig.1. Simple three-stream template representation of phones /p/ and /b/ over a three symbol
alphabet
A phonological pseudo-metric space, corresponding to the structural representation,
is a pair (P, D) where P is a set of all possible templates having N streams and D: P ×
P → R
+
is a mapping of the Cartesian product P × P into the set of non-negative real
numbers R
+
, such that D =
P
N
i=1
d
i
, where d
i
can be any chosen string dissimilarity
measure, satisfying the conditions of reflexivity: ∀x ∈ P D(x, x) = 0 and symmetry:
∀x, y ∈ P D(x, y) = D(y, x). The set P we consider is obviously finite. The resulting
properties of the pseudo-metric space are essentially dictated by the per-stream distance
functions d
i
. The same type of distance function is used for all the streams.
Given an example representation in Fig. 1, and defining the weighted Levenshtein
distance to act on the templates, we obtain a simple metric space where the set P con-
sists of four templates and the metric is defined as a linear combination of three inde-
pendent per-stream weighted Levenshtein edit distances over three different alphabets.
4 Template-Based Evolving Transformation System
Template Transformation System A transformation system (TS) is a triple T =
(P, O, D), where P is a set of phonological templates defined above; O = {o
i
}
m
i=1
is
a finite set of m substitution operations for transforming templates and can be thought
of as a postulated set of basic, or primitive, object features, satisfying the following
two conditions: all the substitution operations are reversible and for every pair of tem-
plates there exists a sequence of operations that transforms one template into the other;
D = {∆
ω
}
ω ∈Ω
is a (competing) parametric family of distance functions defined on P
46

whose parameter set Ω is the (m − 1)-dimensional unit simplex
1
in R
m
given by
Ω =
ω = (w
1
, w
2
, . . . , w
m
) | w
i
≥ 0,
m
X
i=1
w
i
= 1
and each of the distance functions ∆
ω
is defined as follows: weight w
i
is assigned to
the operation o
i
and ∆
ω
(p
k
, p
l
) = min
o
j
∈O
P
k
i=1
w
i
j
, where the minimum is taken
over the set O of all possible sequences o
j
= (o
j
1
, . . . , o
j
k
) of operations that transform
template p
k
into template p
l
.
For example, the templates introduced in the preceding section furnished with the
weighted Levenshtein edit distance define a transformation system whose set of op-
erations consists of single character substitutions, deletions and insertions. The set of
operations is not limited to single letter operations and can include strings of length
more than one known as blocks. In such a case, weighted Levenshtein edit distance can
be extended to form a pseudo-metric called Generalised Levenshtein Distance [11]. In
this case, the operations on phonological templates are defined in exactly the same way
as in the case of a regular weighted Levenshtein distance.
The adjective “competing” is introduced to draw attention to the fact that during
learning only a subset of m weights is “selected” as non-zero. That is, given a finite set
of learning patterns, some weighting schemes ω are more appropriate than others for
the learning class discrimination. It is the various operations O
i
that actually “compete”
with each other because of the condition
P
m
i=1
w
i
= 1. Thus, all the properties of the
system resulting from this definition can be viewed as emergent properties [5].
Given the sets of positive C
+
and negative C
−
training templates from some finite
labeled set, the learning in a transformation system reduces to optimization problem of
a following weight function f : R
m
→ R, where m is the number of operations in O,
max
ω ∈Ω
f(ω) = max
ω ∈Ω
β(ω)
ǫ + α(ω)
, (1)
the function is restricted to (m − 1)-dimensional simplex Ω given above, β(ω) is the
∆
ω
-distance between C
+
and C
−
called interclass distance, α(ω) is the average ∆
ω
-
distance within C
+
called average intraclass distance and ǫ is a small positive constant
to prevent the overflow condition when the values of α(ω) approach zero. Hence f(ω)
combines in itself both the measure of compactness of C
+
, as well as the measure of
separation of C
+
from C
−
, following from the simultaneous minimization of function
α and maximization of function β [5, 7]. The result of the optimization process is the set
of optimal vector weights ˆω = arg max
ω ∈Ω
f(ω), which generates the most distinctive
metric configuration for the class within the global training set.
Evolving Metric and Inductive Class Representation When the set O of substitution
operations is not sufficient to achieve a complete separation of between the classes,
the structure of the model allows for the modification of the set O which is achieved
1
A concept from functional optimisation not to be confused with the Dantzig simplex method
for linear programming [10].
47

by adding some new transformation operations, each representing a composition of
several initial operations, obtaining new set of transformation operations and thus a
new transformation system. Addition of the operations has the effect of changing the
geometry of the distributions of object classes in the corresponding environment: new
shorter transition paths are generated between some pairs of objects in the structured
object set. This leads to the central concept of the transformation system model, the
mathematical structure constructed as a sequence of transformation systems.
Evolving Transformation System (ETS) is a sequence of transformation systems,
defined above, with a common set P of structured objects T
i
= (P, O
i
, D
i
) in which
each set of operations O
i
, except O
0
, is obtained from O
i−1
by adding to it one or
several operations that are constructed from the operations in O
i−1
with the help of a
small fixed set R of composition rules, or operators. Each rule r ∈ R specifies how to
(systematically) construct the corresponding new operation from its operands [5, 6].
In Levenshtein string transformation system, for example, new operations can be
constructed by concatenating the two left-hand sides of the given single-letter opera-
tions, yielding new string operations, i.e. given a ↔ ǫ and b ↔ ǫ, the new operation is
ab ↔ ǫ.
From the above definition it follows that at the stage t of the learning process within
the evolving transformation system, O
0
⊆ O
1
⊆ . . . ⊆ O
t
and for i ∈ [0, t − 1]
∀p
k
, p
l
∈ P, ∀∆
ω
1
∈ D
i
∃∆
ω
2
∈ D
i+1
: ∆
ω
1
(p
k
, p
l
) ≤ ∆
ω
2
(p
k
, p
l
) ,
where ω
1
∈ Ω
i
, ω
2
∈ Ω
i+1
and the dimensions of the simplex Ω
i
are smaller than the
dimensions of simplex Ω
i+1
, simplex Ω
i
being a sub-simplex of Ω
i+1
, i.e. Ω
0
⊂ Ω
1
⊂
. . . ⊂ Ω
t
. Each stage i, therefore induces a new topology represented by Ω
i
.
The optimization process described in the previous section becomes an inner loop
within the general inductive learning process (we are not giving details of the learn-
ing algorithm which is a variant of grammatical inference algorithm described in [7]
and [11]) which proceeds by constructing a sequence of transformations {O
i
} in such
a way that, for each sequentially obtained transformation system T
i
= (P, O
i
, D
i
), the
inter-distances in C
+
expressed shrink to zero while the corresponding distance be-
tween C
+
and C
−
remains non-zero [7]. In view of the above, following requirements
of the inductive generalization are set forth in [7,1]: The inductive class representation
is defined as a triple Π = (
ˆ
C
+
,
ˆ
O,
ˆ
Ω) where
ˆ
C
+
⊂ C
+
,
ˆ
O is the final set of operations
at the end of the learning process, and
ˆ
Ω ⊆ Ω is a set of optimal weight vectors {ˆω}
for the final transformation system. The elements of
ˆ
C
+
act as reference patterns for
definining the class. During classification stage, a new input pattern is always compared
with these reference patterns using the set of weights {∆
ˆω
} from
ˆ
Ω. The set of trans-
formations
ˆ
O is necessary since the concept of a distance can properly be defined only
in terms of these operations.
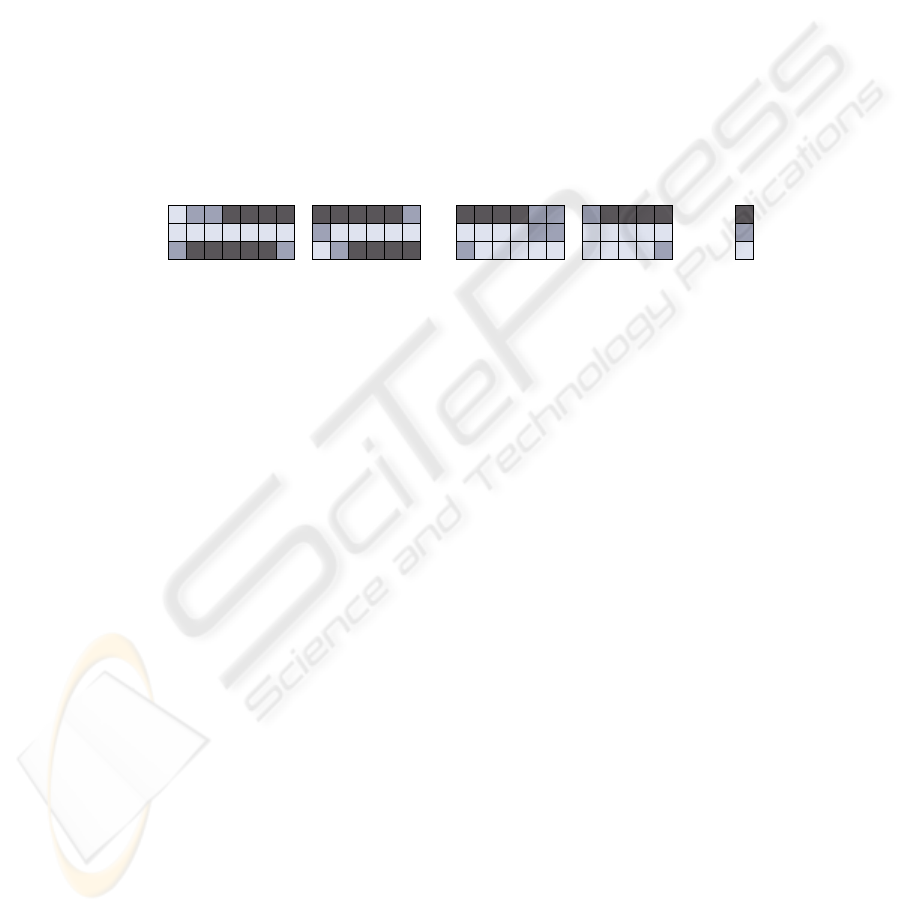
Figure 2 shows the non-trivial stream-specific transformations discovered during the
learning process for the two-class phone problem of Fig. 1. These operations (the corre-
sponding optimal sets of weights
ˆ
Ω
/p/
and
ˆ
Ω
/b/
are not shown) together with the trivial
one-symbol transformations form the optimal set of transformations for each class. To-
gether with the corresponding sets of reference objects
ˆ
C
+
/p/
and
ˆ
C
+
/b/
(which for this
problem consist of one template arbitrarily chosen from the corresponding training set),
48

the three-tuples
Π
/p/
=
ˆ
C
+
/p/
,
ˆ
O
/p/
,
ˆ
Ω
/p/
and Π
/b/
=
ˆ
C
+
/b/
,
ˆ
O
/b/
,
ˆ
Ω
/b/
provide inductive class representations for the two classes in question.
[Consonantal]
[Consonantal]
[Sonorant]
[Sonorant]
[T ense]
[T ense]
ˆ
C
+
/b/
= {p
1
/b/
}
ˆ
C
+
/p/
= {p
1
/p/
}
ˆ
O
/b/
ˆ
O
/p/
Π
/b/
Π
/p/
high
low
mid
Fig.2. Discovered per-stream feature transformations (
ˆ
O
/p/
and
ˆ
O
/b/
) corresponding to the rep-
resentation in Fig. 1 and the resulting class representations Π
/p/
and Π
/b/
.
This representation is meaningful, in a sense, that it is able to capture certain con-
sonantal properties of the phones corresponding to /p/ and /b/. From this toy exam-
ple we, for example, can learn the main difference (within the postulated three-stream
representation) between the two classes, namely different behavior of the [tense] fea-
ture. In general, tense sounds are produced with a deliberate, accurate, maximally
distinct gesture that involves considerable muscular effort; non-tense sounds are pro-
duced rapidly and somewhat indistinctly. In Fig.2, transformations corresponding to the
[tense] stream capture the fact that within the available prototypes of /p/, this feature
is either high or in the process of gradually changing around the high values, whereas
for the prototypes of /b/, the process is opposite. This coincides with the assumption of
phonological contrast between /p/ and /b/ phones within the SPE feature system [9].
In addition, the transformations capture certain asynchronies in the process of sound
changes. The first transformation corresponding to the [consonantal] stream for the
class /p/ indicates the change from low to high which most probably means that one
(or both) of the prototypes were derived from the context in which they were preceded
by a vowel or consonantal sounds from /w/ or /j/ classes.
5 Experiments
Our experiments used the TIMIT database [12]. This is a corpus of high-quality record-
ings of read continuous speech from North American speakers. The entire corpus is
reliably transcribed at the word and surface phonetic levels. For details of the feature-
detecting neural networks, please refer to [3]. The standard training/test data partition
is kept, with only the sx and si sentences being used, resulting in 3696 training ut-
terances from 462 different speakers, out of which 100 sentences were held out for
49

cross-validation training of neural networks. The entire test set of 1344 utterances from
168 speakers was used for the classification experiment. None of the test speakers are in
the training set, and hence all the experiments are open and speaker independent. There
are 39 phone classes.
We quantised the neural network output activations using the quantisation level of
10 and removed the redundant tokens from training and test sets. The sizes of the sym-
bolic training and test sets thus obtained are 124962 and 46633 tokens, respectively. In
order to obtain the sets C
+
, each training set P was reduced to 5 cluster centroids using
k-medians clustering employing the Levenshtein weighted edit distance for similarity
computations and set median algorithm for template selection. The clustering algorithm
initialisation criteria was duration-based [4].
During the learning stage, for each class P out of the 39 classes, represented by its
training set C
+
P
, we derived its corresponding inductive structure Π
P
by using an algo-
rithm outlined in Sect. 4. We defined the stopping criterion for the optimisation problem
to be λ = f
−1
(ˆω), where f(ˆω) is given by (1). The particular value of λ we used was
10
−8
. During the recognition stage, an efficient k-NN AESA search technique [13] was
used to compare each of the 46633 test tokens with the class prototypes by using the
template-based Generalised Levenshtein Distance defined by the respective class induc-
tive structure. The classification accuracy we obtained was 51%, correctly classifying
23783 out of 46633 tokens.
6 Conclusions and Future Work
In this paper we gave an outline of a linguistically inspired structural representation for
speech, an attempt to find an inductively meaningful definition for the speech recogni-
tion problem, focusing on a low level phonological representation of speech patterns.
We showed how inductively “rigid” representation can be made expressive with the
introduction of evolving metric and described the results of the initial experiments con-
ducted with the highly non-trivial continous speech data. We believe that the emphasis
on the class representation of linguistic phenomena will facilitate the development of
the speech recognition field, since the recognition problem cannot be approached ade-
quately without a meaningful representation.
There are several ways of improving the representation described in this paper. For
example, instead of using extensions of standard string-based dissimilarity measures,
such as weighted Levenshtein distance, we can introduce linguistically inspired dis-
tance functions along the lines of [14]. The learning algorithms, developed in the gram-
matical inference setting [7, 11], can be further improved to take into the account the
stream-based phonological structure. In addition, some basic phonological constraints
can potentially be introduced (stream independence assumption, for instance, can be
relaxed to account for similar classes of distinctive phonological features, place of ar-
ticulation being one of them). An efficient prototype selection algorithm for reducing
the training set and selecting the templates containing inductively “interesting” features
is also needed. It is expected that the above modifications will lead to significant im-
provements in the classification accuracy on the TIMIT task.
50

Acknowledgments
The authors would like to thank Lev Goldfarb and Mirjam Wester for many useful
suggestions.
References
1. Goldfarb, L., Deshpande, S.S., Bhavsar, C.: Inductive Theory of Vision. Technical Report
TR96-108, Faculty of Computer Science, University of New Brunswick, Canada (1996)
2. King, S., Taylor, P.: Detecting phonological features in continuous speech using neural net-
works. Computer Speech and Language 14 (2000) 333–353
3. Wester, M.: Syllable classification using articulatory acoustic features. In: Proc. Eurospeech,
Geneva (2003) 233–236
4. Gutkin, A., King, S.: Structural Representation of Speech for Phonetic Classification. In:
Proc. 17th ICPR. Volume 3., Cambridge, UK (2004) 438–441
5. Goldfarb, L.: On the foundations of intelligent processes – I. An evolving model for pattern
learning. Pattern Recognition 23 (1990) 595–616
6. Goldfarb, L.: What is distance and why do we need the metric model for pattern learning ?
Pattern Recognition 25 (1992) 431–438
7. Goldfarb, L., Nigam, S.: The Unified Learning Paradigm: A Foundation for AI. In Honavar,
V., Uhr, L., eds.: Artificial Intelligence and Neural Networks: Steps toward Principled Inte-
gration. Academic Press, Boston (1994) 533–559
8. Jakobson, R., Fant, G.M., Halle, M.: Preliminaries to Speech Analysis: The distinctive fea-
tures and their correlates. MIT Press, Cambridge, MA (1963)
9. Chomsky, N., Halle, M.: The Sound Pattern of English. MIT Press, Cambridge, MA (1968)
10. Lange, L.H.: 10. In: Elementary Linear Algebra. John Wiley & Sons, New York (1968)
11. Abela, J.M.: ETS Learning of Kernel Languages. PhD thesis, Faculty of Computer Science,
University of New Brunswick, Canada (2001)
12. Garofolo, J.S.: Getting Started with the DARPA TIMIT CD-ROM: an Acoustic Phonetic
Continuous Speech Database. National Institute of Standards and Technology (NIST),
Gaithersburgh, Maryland. (1988)
13. Juan, A., Vidal, E.: On the Use of Normalized Edit Distances and an Efficient k-NN Search
Technique (k-AESA) for Fast and Accurate String Classification. In: Proc. 15th ICPR. Vol-
ume 2. (2000) 680–683
14. Kondrak, G.: A New Algorithm for the Alignment of Phonetic Sequences. In: Proceedings
of the First Meeting of the North American Chapter of the Association for Computational
Linguistics (NAACL-2000), Seattle (2000) 288–295
51
