
A METHODOLOGY FOR ROLE-BASED MODELING OF OPEN
MULTI-AGENT SOFTWARE SYSTEMS
Haiping Xu and Xiaoqin Zhang
Computer and Information Science Department
University of Massachusetts Dartmouth
North Dartmouth, MA 02747
Keywords: Role-based modeling, Open multi-agent software systems, Object-Z formalism, A-R mapping.
Abstract: Multi-agent systems (MAS) are rapidly emerging as a powerf
ul paradigm for modeling and developing
distributed information systems. In an open multi-agent system, agents can not only join or leave an agent
society at will, but also take or release roles dynamically. Most of existing work on MAS uses role
modeling for system analysis; however, role models are only used at conceptual level with no realizations in
the implemented system. In this paper, we propose a methodology for role-based modeling of open multi-
agent software systems. We specify role organization and role space as containers of conceptual roles and
role instances, respectively. Agents in an agent society can take or release roles from a role space
dynamically. The relationships between agents are deduced through a mechanism called A-R mapping. As a
potential solution for automated MAS development, we summarize the procedures to generate a role-based
design of open multi-agent software systems.
1 INTRODUCTION
Multi-agent systems (MAS) are rapidly emerging as
a powerful paradigm for modeling and developing
distributed information systems. However, to specify
and design multi-agent systems is not an easy task.
Methodologies for developing multi-agent systems
are therefore proposed to provide software engineers
guidelines to develop MAS in a systematic manner.
Among them, role-based analysis and design is one
of the most effective methodologies for agent-based
system analysis and design. Most of the existing
work defines roles as conceptual units that only
happen in the analysis phase. The roles abstracted
from use cases are abstract constructs used to
conceptualize and understand the system. They have
no realizations in the implemented system after the
analysis stage. In most of the cases, all roles are
atomic constructs and cannot be defined in terms of
other roles (Juan et al., 2002). This approach is
feasible when designing small-scale, closed system,
especially when an agent only takes a single role.
However, in an open multi-agent system, agents can
not only join or leave an agent society at will, but
also take or release roles dynamically. When an
agent takes more than one role, and further more, if
an agent takes or releases roles at run time, this
approach becomes inappropriate. This is because
when role assignments are dynamic, the interaction
relationships between agents become quite
complicated, and usually they cannot be determined
at design time. To develop an open and dynamic
multi-agent system, it becomes vital for us to
introduce the concept of role instance (a concrete
implementation of a conceptual role) into the
development process, and to design algorithms to
deduce agent interaction relationships from role
assignments and role relationships. In this paper, we
propose a methodology for role-based modeling of
open multi-agent systems. In our approach, we
define a role organization that provides the ontology
for modeling roles and their relationships. A role
space is then defined as a container of role instances,
as well as a middleware for agents to find the
appropriate role instances from the role space. Based
on the concepts of role organization and role space,
we propose that agent society consists of a set of
agents, which may take or release roles from a
corresponding role space dynamically. The
relationship between agents in an agent society can
be deduced through a mechanism called A-R
mapping. To support automated software
development, we also propose a development
process to design role-based open MAS.
246
Xu H. and Zhang X. (2005).
A METHODOLOGY FOR ROLE-BASED MODELING OF OPEN MULTI-AGENT SOFTWARE SYSTEMS.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 246-253
DOI: 10.5220/0002553202460253
Copyright
c
SciTePress

There are two main strands of work to which our
research is related, i.e., work on formal modeling of
agent systems, and work on role-based methodology
for development of multi-agent systems. Previous
work on formal modeling of agent systems has been
based on formalisms, such as Z, temporal logic, and
Petri nets, to specify agent systems or agent
behaviors. Luck and d’Inverno tried to use the
formal language Z to provide a framework for
describing the agent architecture at different levels
of abstraction (Luck and d’Inverno, 1995). They
proposed a four-tiered hierarchy comprising entities,
objects, agents and autonomous agents. Fisher’s
work on Concurrent M
ETATEM used temporal logic
to represent dynamic agent behavior (Fisher, 1995).
Xu and Shatz proposed the agent-oriented G-nets,
which is a high-level formalism of Petri net, to
model and verify multi-agent behaviors by using
existing Petri net tools (Xu and Shatz, 2003). More
recently, a formalism called OZS, which is a
combination of Object-Z and statecharts, is used to
specify multi-agent systems (Hilaire et al., 2004).
With this approach, Object-Z is used to specify the
transformational aspects, and statecharts are used to
specify the reactive aspects of an MAS.
In summary, formal methods are typically used
for specification of agent systems and agent
behaviors. Existing work in this direction either does
not directly use role modeling for agent design, or
uses role modeling simply as conceptual guidelines
for agent development during the analysis phase. In
contrast, we propose our formal role-based open
multi-agent system framework, where role classes
can be explicitly instantiated, and role instances can
be taken or released by agents at run time.
A second strand of related work is to propose
role-based methodologies for development of multi-
agent systems. Typical examples of such efforts
include the Gaia methodology (Wooldridge et al.,
2000) and Multiagent Systems Engineering (MaSE)
methodology (DeLoach et al., 2001). The Gaia
methodology models both the macro (social) aspect
and the micro (agent internals) aspect of the multi-
agent system. The methodology covers the analysis
phase and the design phase. Specifically, in the
analysis phase, the role model and interaction model
are constructed. Based on the analysis models, in the
design phase, three models, i.e., the agent model,
service model and acquaintance model, are
constructed during the initial design of the system,
and then are refined during the detailed design phase
using conventional object-oriented methodology.
Similarly, the MaSE methodology is a specialization
of more traditional software engineering
methodologies. During the analysis phase of the
MaSE methodology, a set of roles are produced,
which describes entities that perform some function
within the system. In MaSE, each role is responsible
for achieving, or helping to achieve specific system
goals and subgoals. During the design phase, agent
classes are created from the roles defined in the
analysis phase. In other words, roles are the
foundation upon which agent classes are designed,
and thus, the design of agent classes depends on role
specifications. In our proposed approach, agent
components and role components are loosely
coupled, where agents take or release roles at run
time without having the knowledge of the internal
structure of role instances. Consequently, role
classes and agent classes can be designed at the
same time. Thus, the specification and design of
agent classes can be significantly simplified.
The rest of this paper is organized as follows:
Section 2 presents a role-based MAS specification
using Object-Z formalism. It describes a three
layered system model for development of open
MAS. The three layers are role organization, role
space and agent society. Section 3 first presents the
design of role organization in terms of role
relationships, then it summarizes a development
process for role-based open MAS, and discusses
how agents from an agent society take or release
roles in a corresponding role space, and how to build
up agent interaction relationships using the A-R
mapping mechanism. Finally, in Section 4, we
provide conclusions and our future work.
2 ROLE-BASED SPECIFICATION
2.1 An Organizational Approach
To facilitate the design of open MAS, we explicitly
separate the concepts of role organization and role
space that consist of conceptual roles and role
instances, respectively. A role organization is
defined at a conceptual level, in which roles have
relationships such as inheritance, aggregation,
association and incompatibility. On the other hand, a
role space consists of role instances, which are
concrete implementations of conceptual roles, and
can be taken or released by agents at run time. A
three-layered general model of role-based open
multi-agent systems is illustrated as in Figure 1.
As shown in Figure 1, the role organization
defines a set of conceptual roles and their
relationships. For example, role_B and role_C are
defined as subclasses of role_A. Role_D is defined
as a part of role_C, which implies that role_C views
role_D’s responsibilities and capabilities as part of
its own. Role_D and role_E have an association
relationship, where role_D and role_E may be
responsible for providing certain information to each
A METHODOLOGY FOR ROLE-BASED MODELING OF OPEN MULTI-AGENT SOFTWARE SYSTEMS
247
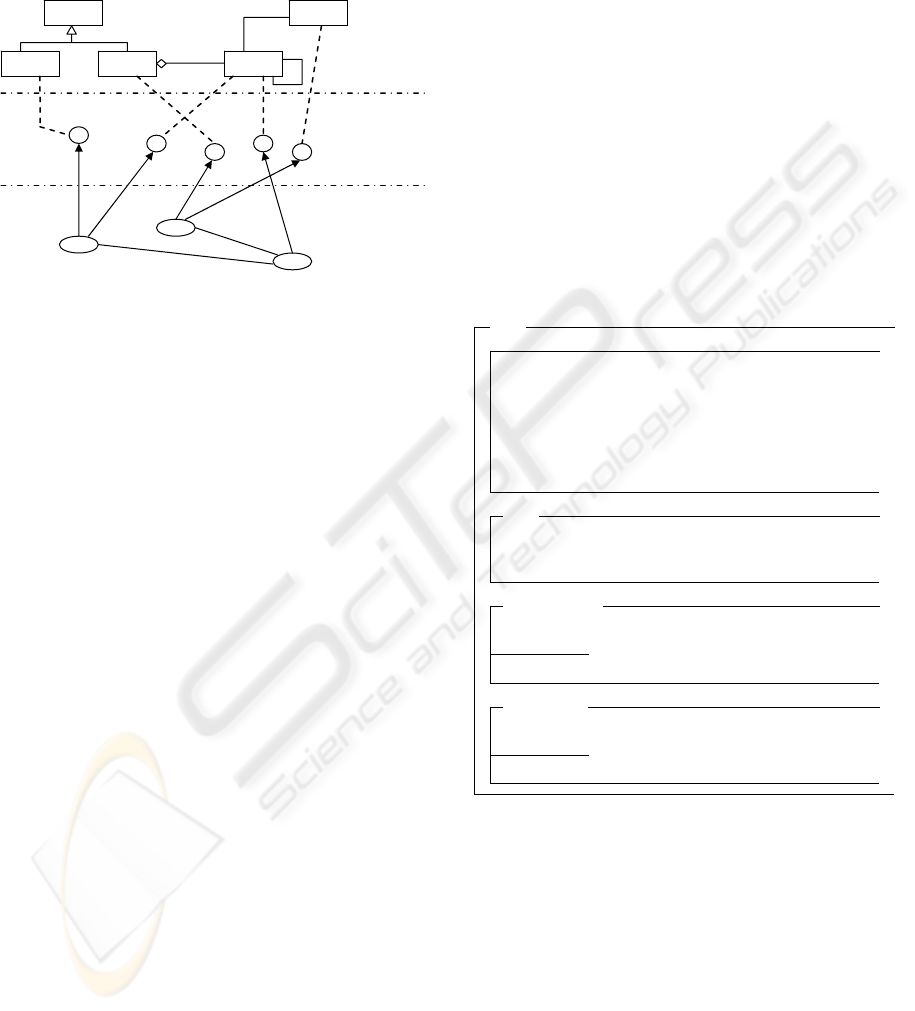
other when there are such requests. In addition,
role_D has a reflective association relationship to
itself, for example, when role_D represents a type
for team members, team members are required to
discuss on certain topics.
Figure 1: A general model of role-based open MAS
At the second layer, we define a role space that
consists of role instances. Each role instance must be
of a role type defined in its corresponding role
organization. For example, roleInstance_2 is of type
role_D. The relationships between role instances can
be easily derived from their class relationships.
Therefore, it is not necessary to explicitly show their
relationships at this layer.
At the third layer, we define an agent society that
consists of agent instances. Agents are free to join or
leave the agent society, and they can take one or
more than one role instances from the role space.
For example, agent_1 takes two role instances, i.e.,
roleInstance_1 and roleInstance_2, which are of
type role_B and role_D, respectively. An agent can
not only take roles at run time, but also release them
if they are not needed any more. The relationships
between agents are based on the relationships
between roles that are taken. For example, agent_1
and agent_3 have an interaction relationship because
role_D has a reflective association relationship with
itself; agent_2 and agent_3 have an interaction
relationship because role_D and role_E have an
association relationship. Notice that relationships of
inheritance and aggregation between roles are not
carried down to agent relationships.
Since agents take roles dynamically, agents are
not designed based on role modeling. In other
words, the development of agents can be totally
independent of the development of roles. Thus, as
one of the major advantages of our approach, the
components of agents and roles are loosely coupled,
and practically, they can be developed independently
by different groups of people, for example, two
different companies.
2.2 A Formal Model for Open MAS
To specify our proposed role-based model of open
multi-agent systems, we build a framework using
Object-Z formalism (Duke et al., 1995), which is an
extension to Z formal specification language for
modular design of complex systems. The framework
is composed of a set of classes that specify the basic
concepts including Role, RoleOrgnaization,
RoleSpace, Agent and AgentSociety. We now
provide a few key definitions giving the formal
structure of our role-based open MAS models.
Definition: A role, or a conceptual role, is
defined as a template of role instances that has
attributes, goals, plans, actions, permissions and
protocols. A role instance is a fully instantiated role.
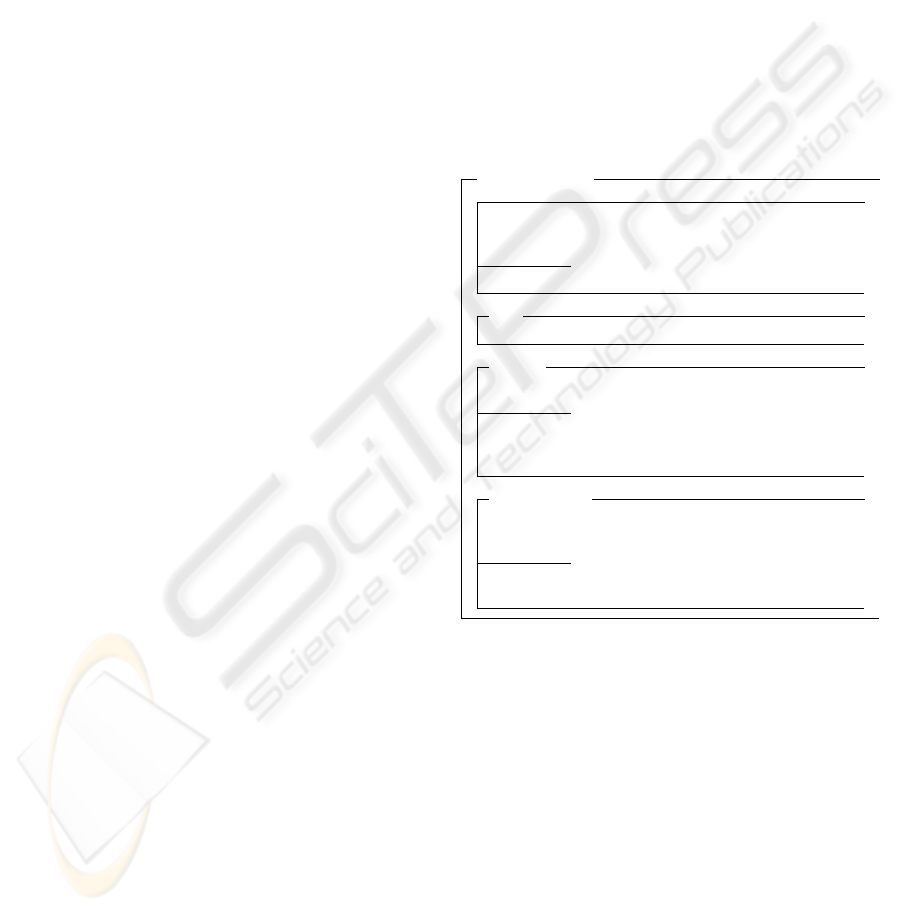
The class schema Role can be formally defined
based on its state schemas and operation schemas as
follows:
Role
attributes : P Attribute
goals : P Goal
plans : P Plan
actions : P Action
permissions : P Permission
protocols : P Protocol
beTaken : B
I
NIT
permissions = ∅
protocols = ∅
beTaken = false
setPermission
∆permissions
perm ?:Permission
permissions
= permissions ⊕{perm ?}
addProtocol
∆protocols
prot?:Protocol
procotols
= protocols ∪{prot ?}
The Role class consists of a state variable
attributes that represents a set of role attributes,
whose elements are of type Attribute. The attributes
of a role describe the characteristic properties of a
role, including role name and role identification. A
Role is defined to have a set of goals and a set of
plans, as well as a set of actions. The state variable
goals describe a set of goals of type Goal, which
consists of a goal set that specifies the goal domain
and goal states of a role. The state variable plans
represent a set of plans of type Plan. A plan
describes how to achieve a goal or subgoal by
executing several actions in a specified order. Each
role_A
role_C role_D
role_E
Role Organization
Role Space
agent_1
agent_2
agent_3
Agent Society
roleInstance_1
roleInstance_2
roleInstance_n
role_B
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
248
plan is associated with a goal or a subgoal; however,
a goal or subgoal may associate with more than one
plan, and the most suitable one will be selected to
achieve that goal or subgoal by the agent who takes
this role according to the run-time circumstance. To
carry out a certain plan, a role has the capability of
performing some actions. The state variable actions
refer to a set of actions of type Action, which this
role is capable to execute. A role has a set of
permissions when realizing goals or subgoals. The
state variable permissions, whose elements are of
type Permission, describe the resources that are
available to that role and the accessing rights of that
role for information when achieving a goal or
subgoal. For example, a role may have the right to
read a particular piece of information, to modify it,
or even to generate new information. The state
variable protocols define a set of protocols of type
Protocol, which describes the way how a role may
interact with other roles. An example of such
protocol is the contract net protocol (Smith, 1980).
Finally, the Boolean state variable beTaken defines
if a role instance has already been associated with an
agent. A true value indicates that a role instance has
already been taken by an agent, and thus, it is not
available for other agents.
The concept of role instance, i.e., an instantiated
role, is similar to the concept of object, which is an
instantiated entity of a class. Notice that, although a
role instance has certain goals, plans and actions, it
does not have the responsibility to choose the most
appropriate plan and the corresponding actions to
achieve a certain goal or subgoal. Instead, such
activities are the responsibility of agents.
To support role behavior changing at run time,
permissions can be modified and new protocols can
be added to a role at run time. This is achieved by
providing the operations of setPermission and
addProtocol in the Role class schema.
Definition A role organization defines a set of
conceptual roles and the relationships between these
conceptual roles.
Before we can define the class schema
RoleOrganization, we must first define the types of
RoleMetaClass and Relationship. A metaclass is a
class whose instances are classes. Every class has a
metaclass, of which it is the sole instance. The
RoleMetaClass specifies the Role class in terms of
its attributes and behaviors. Therefore, an instance of
type RoleMetaClass is the Role class. The
Relationship type is defined as [inheritance |
aggregation | association | incompatibility].
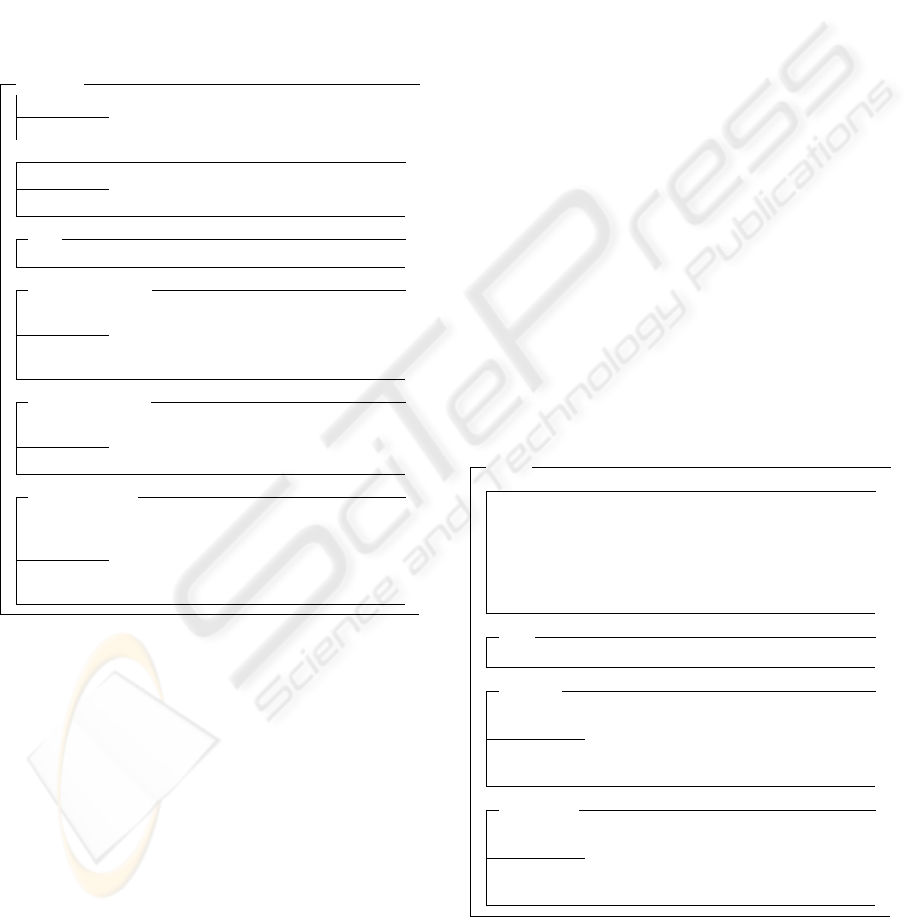
As shown in the class schema RoleOrganization
below, the state variable roles are defined as a set of
elements of type RoleMetaClass or its derivatives,
thus roles refers to a set of subclasses of the Role
class and the Role class itself. Accordingly, the
function relationship is defined as relationships
between classes (roles) instead of objects (role
instances). Such relationships include inheritance
relationship, aggregation relationship, association
relationship and incompatibility relationship. We
will describe them in details in Section 3.1. The Role
class is the root class of all its descendents, and it
exists at the very beginning when creating the role
organization. New role classes can be added into the
role organization. When a new class role? is added,
the inheritance relationship between role? and its
superclass r must be added too. This is automatically
achieved by updating the function relationship by
adding a mapping of {(role?, r)
inheritance}.
Relationships other than the inheritance relationship
between role classes must be set up by applying the
operation setRelationship.
a
RoleOrganization
roles : P ↓ RoleMetaClass
relationship :
↓ RoleMetaClass ×↓RoleMetaClass → Relationship
∀ r 1, r2 ∈ roles , r 1 = r2 • (r 1, r 2) ∈ dom relationship
I
NIT
roles = {Role }
addRole
∆roles , relationship
role ?:↓ RoleMetaClass
role ? ∈ roles ∧ roles
= roles ∪{role ?}
∃ r ∈ roles • relationship
=
relationship ∪{(role ?, r) → inheritance}
setRelationship
∆relationship
r1?, r 2? : ↓ Role
rela ?:Relationship
r1?, r 2? ∈ roles ∧ rela ? = inheritance ∧
relationship
= relationships ⊕{(r 1?, r2?) → rela ?}
Definition A role space is a container of a set of
role instances that are of types defined in a role
organization. Each role space corresponds to a
single role organization; however, a role
organization can be mapped to a set of similar role
spaces. Role instances can be added into or deleted
from a role space dynamically. A role space
provides services to create or delete role instances as
well as to find a certain role instance according to
role attributes.
A role space is defined upon a role organization.
As shown in the class schema RoleSpace below, we
define roleOrganization as a global instance of type
RoleOrganization, in which the number of role
classes must be more than one. If the
roleOrganization is modified, the role space must be
updated accordingly in order to be consistent with
A METHODOLOGY FOR ROLE-BASED MODELING OF OPEN MULTI-AGENT SOFTWARE SYSTEMS
249
the conceptual roles and role relationships defined in
the roleOrganization. For example, when a certain
conceptual role cr is deleted from the
roleOrganization (for simplicity, the operation
schema deleteRole is not defined in the class schema
RoleOrganization), any role instances of type cr
must also be deleted. This is important because later
on, we will see that an agent society is also defined
based on the role types and class relationships from
a role organization. Therefore, this ensures that the
types of role instances in a role space are always
consistent with that of role instances an agent may
take.
RoleSpace
roleOrganization : RoleOrganization
#roleOrganization.roles > 1
roleInstances : P ↓ Role
∀ ri ∈ roleInstances • ri.getClass ∈ roleOrganization.roles
INIT
roleInstances = ∅
createRoleInstance
∆roleInstances
ri?:↓ Role
ri?.getClass ∈ roleOrganization.roles
ri? ∈ roleInstances ∧ roleInstances
= roleInstances ∪{ri?}
deleteRoleInstance
∆roleInstances
ri?:↓ Role
ri? ∈ roleInstances ∧ roleInstances
= roleInstances −{ri?}
findRoleInstance
ΞroleInstances
ra ?:Role .Attribute
ri!:↓ Role
(NotFound ∧ ri!=null ) ∨
∃ ri ∈ roleInstances • ri.attributes = ra? ∧ ri!=ri
The state variable roleInstances refers to a set of
role instances of type Role or its derivatives, which
must have already been defined in the
roleOrganization. Initially, the role space contains
zero role instances. Role instances can be added into
or deleted from a role space dynamically. In
addition, a role space also serves as a middleware
for agents to find appropriate role instances
according to role attributes to fulfill their
motivations.
Definition An agent or an agent class is defined
as a template of agent instances that has attributes,
motivations, sensor, reasoningMechanism, and a
reference rolesTaken to a set of role instances. An
agent instance is a fully instantiated agent.
As shown in the following class scheme Agent,
an agent has attributes such as agent name, agent
owner and agent identification. An agent also has
motivations of type Motivation. A motivation is
defined as any desire or preference that can lead to
the generation and adoption of goals and affect the
outcome of the reasoning or behavioral task intended
to satisfy those goals (Luck and d’Inverno, 1995).
The sensor of an agent perceives related
environment changes of type Environment and
transforms them into a set of sensor data. The
reasoningMechanism is defined as a composite
function that takes a set of sensor data and a set of
motivations as arguments and maps them to a set of
goals and subgoals. Based on the goals and
subgoals, the function further derives a set of needed
roles. The agent then takes each needed role from a
role space to fulfill its motivations. Notice that the
function reasoningMechanism in reality is more
complicated than what we have defined, e.g., it also
provides the functionality to choose plans according
to a set of sensor data and a set of goals and
subgoals. A more sophisticated definition of the
reasoningMechanism is beyond the scope of this
paper. The state variable rolesTaken refers to a set of
roles that are taken by the agent. The Agent class
schema defines two key operations: takeRole and
releaseRole. The takeRole operation takes an
available role instance from a role space, and set it to
be unavailable to other agents. On the other hand,
the releaseRole operation releases a role instance
and set it to be available to other agents.
Agent
attributes : P Attribute
motivations : P Motivation
sensor : Environment → SensorData
reasoningMechanism :
P SensorData × P Motivation → P Goal → P ↓ Role
rolesTaken : P ↓ Role
I
NIT
rolesTaken = ∅
takeRole
∆rolesTaken
ri?:↓ Role
ri?.beTaken = false ∧ ri?.beTaken
= true
ri? ∈ rolesTaken ∧ rolesTaken
= rolesTaken ∪{ri?}
releaseRole
∆roleTaken
ri?:↓ Role
ri?.beTaken = true ∧ ri?.beTaken
= false
ri? ∈ rolesTaken ∧ rolesTaken
= rolesTaken −{ri?}
Definition An agent society is defined upon a
role organization and consists of a set of agent
instances that are of type Agent. An agent society
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
250
provides services to create or delete agent instances
such that agent instances can be added into or
deleted from an agent society dynamically.
The structure of agent society is often
determined by organizational design which is
independent of the agents themselves (Dastani et al.,
2003). As shown in the AgentSociety class schema
below, the AgentSociety class is defined upon a
roleOrganization of type RoleOrganization. Since
both role spaces and agent societies are built on role
organizations, there is a one to one mapping between
a role space and an agent society when they share
the same role organization. This implies that role
instances created in one role space can only be taken
by agents that belong to its corresponding agent
society; meanwhile, any agent belongs to an agent
society must take at least one role from a
corresponding role space; otherwise, it shall leave
the agent society eventually. Note that this does not
mean an agent can take roles only from one role
space. In contrast, an agent may join more than one
agent societies and take roles from different role
spaces.
AgentSociety
roleOrganization : RoleOrganization
#roleOrganization.roles > 1
agentInstances : P Agent
interaction : Agent × Agent → Message
∀ a ∈ agentInstances, ∃ r ∈ a.rolesTaken •
r.getClass ∈ roleOrganization.roles
∀ a1, a2 ∈ agentInstances, a1 = a2,
∃ r 1 ∈ a1.rolesTaken, ∃ r2 ∈ a2.rolesTaken,
roleOrganization.relationship(r 1.getClass, r2.getClass)
= association • (a1, a2) ∈ dom interaction
I
NIT
agentInstances = ∅
createAgentInstance
∆agentInstances
agent?:Agent
agent? ∈ agentInstances ∧
agentInstances
= agentInstances ∪{agent?}
deleteAgentInstance
∆agentInstances
agent?:Agent
∀ r ∈ agent?.rolesTaken • agent?.releaseRole(r)
agent? ∈ agentInstances ∧
agentInstances
= agentInstances −{agent?}
An agent society contains a set of agent
instances of type Agent, referred to by the state
variable agentInstances. The variable interaction is
defined as a function which, when applies to a
source agent and a destination agent, may generate a
message of type Message. An agent instance belongs
to an agent society takes roles of type defined in its
corresponding role organization, upon which the
agent society is defined. When two agents have an
association relationship between their role instances,
they may have interactions by sending messages to
each other. Similar to a role space, the agent society
contains zero agent instances initially. Agent
instances can be added into or deleted from an agent
society dynamically.
3 ROLE-BASED MAS DESIGN
3.1 Class Relationships in a Role
Organization
The first step to design a multi-agent system is to
design Role classes and their relationships. Role
hierarchy defines the relationships among different
roles in a role organization. In addition to the
aggregation relationships and association
relationships between classes, inheritance is a
mechanism for incremental specification and design,
whereby new classes may be derived from one or
more existing classes. Inheritance therefore is
particularly significant in the effective reuse of
existing specifications (Stepney et al., 1992).
As a simple example of the inheritance
relationship, consider a role type called
LeadingRole, which is responsible for hiring other
roles in fulfilling its goal.
LeadingRole
Role
hiringNumber : ↓ RoleMetaClass → N
I
NIT
Role .I
NIT
hiringNumber = {Self → 1}
updateHiringNumber
∆hiringNumber
rc?:↓ RoleMetaClass; num?:N
hiringNumber
= hiringNumber ⊕{rc ? → num?}
As shown in the above class schema, the
LeadingRole class is defined as a subclass of the
Role class. Therefore, a leading role inherits all the
data fields, e.g., attributes, goals and plans, as well
as all operations defined in the Role class. In
addition, a leading role records how many group
members it needs. This functionality is defined by
the operation updateHiringNumber, where
hiringNumber is defined as a function to map a role
type to the number of role instances needed. Note
A METHODOLOGY FOR ROLE-BASED MODELING OF OPEN MULTI-AGENT SOFTWARE SYSTEMS
251
that in each role organization, there exists a major
leading role, which is responsible for hiring other
roles in that organization.
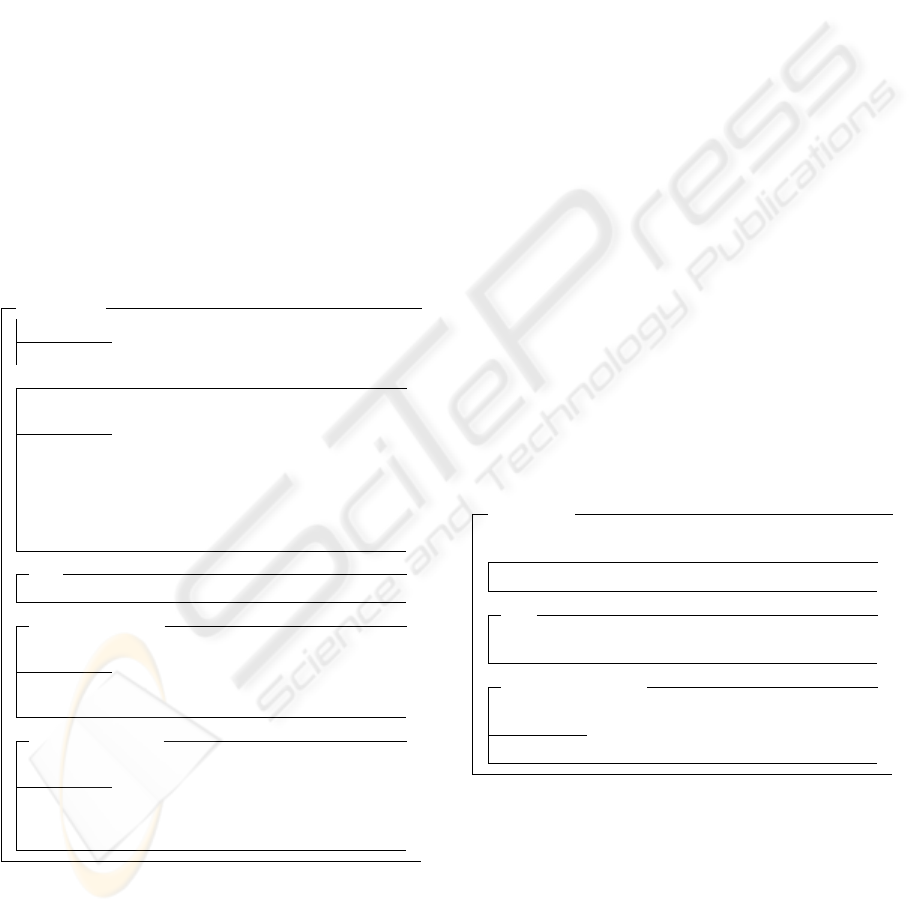
One more role class relationship in a role
organization is called an incompatibility relationship,
which exists when two roles cannot be taken by an
agent at the same time under certain conditions. An
example of such relationship (denoted as a dotted
arc with a small circle) between a BankerRole and a
LoanBorrowerRole is illustrated in Figure 2. In this
example, a banker belonging to a bank is disallowed
to borrow loan from the same bank.
Figure 2: Example of incompatibility relationship
3.2 A Design Process for MAS
The purpose of our proposed approach is to ease
software engineer’s effort in developing open multi-
agent systems. As we mentioned before, when
agents take more than one roles, agent relationships
in an agent society become very complicated. To
make the design of intelligent agents simple, we
avoid explicitly defining relationships between agent
instances in an agent society. Instead, we deduce the
interaction relationships between agent instances in
an agent society from role assignments and role
relationships in its corresponding role organization.
As a summary, we briefly describe the 5-step
generic procedure to design open MAS as follows:
1. Design the set of Role classes Ω and their
relationship Π
1
: Ω X Ω → [IH | AG], where IH
and AG represent the relationship types of
inheritance and aggregation, respectively.
2. Design the role organization Φ according to the
class schema RoleOrganization, and define any
association relationships and incompatibility
relationships between classes, i.e., Π
2
: Ω X Ω →
[AS | IC], where AS and IC represent the
relationship types of association and
incompatibility, respectively.
3. Design the role space Γ according to the class
schema RoleSpace. The role space Γ should
support creating, advertising and searching for
role instances. It may use existing middleware,
e.g., Sun Jini, for its purpose.
4. Refine the Agent class with a set of sensors and a
set of appropriate reasoning mechanisms. This
step may be overlapped with Step 1-3.
5. Design agent society Θ according to the class
schema AgentSociety. The agent society Θ
contains a set of agent instances of type Agent,
and it corresponds to the role organization Φ
with the same design purpose for agent
organization or society.
Since we design multi-agent systems as open
systems, agents may join or leave agent societies
freely, and they can take roles at run time according
to their motivations. Thus, the relationships between
agents cannot be determined at design time; instead,
they must be set up dynamically. In Section 3.3, we
discuss how to deduce agent interaction
relationships and check role incompatibility for
agents.
3.3 Open Role Space and Open Agent
Society
Multi-agent systems are one of the most promising
approaches to creating open systems because of their
capabilities to dynamically reorganize themselves as
the system goals and constituent agents change
(Dastani et al., 2003). In our approach, the openness
of a multi-agent system refers to two things: open
role space and open agent society. Open role space
refers to a space where role instances can be added
into or deleted from dynamically; while open agent
society implies that agents can not only join or leave
the system at will, but more importantly, they can
take or release role instances in a role space
dynamically. The procedure of taking or releasing
role instances in a role space is a mapping process
from agents in an agent society to role instances in a
role space. We call this mapping process the A-R
mapping.
Definition A-R mapping is a process for agents
from an agent society Θ to take or release role
instances in a role space Γ. Both Θ and Γ are defined
upon the same role organization Φ. Formally, the
state of A-R mapping is defined by the following
function:
A-R mapping state = f : Agent → P ↓ Role
where f is a partial function which maps each
agent instance to a set of role instances.
The process of A-R mapping is a dynamic
process of role assignment, which involves the
following steps:
1. Initialization: The agent society Θ makes a
request to the role space Γ to instantiate the major
LeadingRole class defined in the role organization
Φ, and create a role instance for it.
2. Role assignment: for each agent α in the agent
society Θ, do the following:
a. When agent α receives any sensor data from its
environment, it may decide to generate some
BankerRole
[same bank]
LoanBorrowerRole
ICEIS 2005 - INFORMATION SYSTEMS ANALYSIS AND SPECIFICATION
252

new goals or subgoals based on the sensor data
and agent α’s motivations.
b. With its reasoning mechanisms, agent α further
deduce a set Ω of needed roles of types defined
in the role organization Φ. If none of the roles
in set Ω is of type LeadingRole, go to step 2.d.
c. If any role in role set Ω is a leading role of type
LeadingRole, agent α takes the corresponding
role instance from the role space Γ, if available,
updates the hiring number of other roles as
needed, and makes requests to the role space Γ
to create role instances for those roles under
hiring.
d. Repeat the following for a period of time Τ:
Search the role space Γ for any role instances
that match roles in role set Ω. If there is a
match, agent α takes that role instance. If all
roles in role set Ω have been matched with
some role instances in Γ, go to Step 3.
e. If any role in the role set Ω cannot be matched
with a role instance in the role space Γ, agent α
may decide to release all role instances or keep
its current occupations.
3. Marking role incompatibility: for each agent α,
mark its role incompatibility as the following:
for any role instances r
1
, r
2
∈ α.rolesTaken, if
Φ.relationship(r
1
.getClass, r
2.
getClass) ==
incompatibility, mark agent α as potential role
incompatibility with a self-loop.
4. Setting up interaction relationships: for each
agent α, set up the interaction relationships
between agent α and other agents from the same
agent society Θ as the following : for any agent
instance β ∈ Θ.agentInstances, where α ≠ β, if ∃
r
1
∈ α.rolesTaken, r
2
∈ β.rolesTaken such that
Φ.relationship(r
1
.getClass, r
2.
getClass) ==
association, then (α, β) ∈ dom Θ.interaction.
The condition for role incompatibility of an
agent α is checked at run time. Whenever the
condition is satisfied, agent α must communicate
with other agents to resolve the conflicts. In case the
condition cannot be turned into false, one of the role
instances in conflict
must be released by agent α.
4 CONCLUSIONS AND FUTURE
WORK
This paper describes a role based methodology for
development of open multi-agent systems. The
proposed concept of role space separates the design
of roles and agents, which simplifies agent
development. Inheritance relationships between
roles support reuse of role design. For our future
work, we will refine the association relationship into
more specific relationships, e.g., subordination
relationship and collaboration relationship. Based
on the refined relationships, more specific role
organizations can be designed. Social norms or rules
can be specified in a role organization, and then
checked for consistency in its corresponding agent
society. This verification process may be automated
due to our formal approach and the A-R mapping
mechanism.
REFERENCES
Dastani, M., Dignum, V., and Dignum, F. 2003. Role-
assignment in open agent societies. Proceedings of the
2
nd
International Joint Conference on Autonomous
Agents & Multiagent Systems, Australia, pp. 489-496.
DeLoach, S. A., Wood, M. F., and Sparkman, C. H. 2001.
Multiagent systems engineering. The International
Journal of Software Engineering and Knowledge
Engineering, vol. 11, no. 3, pp. 231-258.
Duke, R., Rose, G., and Smith, G. 1995. Object-Z: a
specification language advocated for the description of
standards. Computer Standards and Interfaces, vol.
17, North-Holland, pp. 511-533.
Fisher, M. 1995. Representing and executing agent-based
systems. Proceedings of the International Workshop
on Agent Theories, Architectures, and Languages, M.
Wooldridge and N. Jennings, eds., LNCS, vol. 890,
Springer-Verlag, pp. 307-323.
Hilaire, V., Simonin, O., Koukam, A., and Ferber, J. 2004.
A formal approach to design and reuse of agent and
multiagent models. Proceedings of the Fifth
International Workshop on Agent-Oriented Software
Engineering (AOSE-2004), New York.
Juan, T., Pearce, A., and Sterling, L. 2002. ROADMAP:
extending the Gaia methodology for complex open
systems. Proceedings of the 1
st
International Joint
Conference on Autonomous Agents and Multiagent
Systems (AAMAS 2002), Bolognia, Italy, pp. 3-10.
Luck, M. and d’Inverno, M. 1995. A formal framework
for agency and autonomy. Proceedings of the First
International Conference on Multi-Agent Systems
(ICMAS-95), AAAI Press / MIT Press, pp. 254-260.
Smith, R. G. 1980. The contract net protocol: high-level
communication and control in a distributed problem
solver. IEEE Transactions on Computer, vol. C-29,
pp. 1104-1113.
Stepney, S., Barden, R., and Cooper, D. (eds) 1992. Object
orientation in Z. Workshops in Computing, pp. 59-77.
Wooldridge, M., Jennings, N. R., and Kinny, D. 2000. The
Gaia methodology for agent-oriented analysis and
design. International Journal of Autonomous Agents
and Multi-Agent Systems, vol. 3, no.3, pp. 285-312.
Xu, H. and Shatz, S. M. 2003. A framework for model-
based design of agent-oriented software. IEEE
Transactions on Software Engineering (IEEE TSE),
vol. 29, no. 1, pp. 15-30.
A METHODOLOGY FOR ROLE-BASED MODELING OF OPEN MULTI-AGENT SOFTWARE SYSTEMS
253
