
ANATOMY OF A SECURE AND SCALABLE MULTIAGENT
SYSTEM FOR EVENT CAPTURE AND CORRELATION
Timothy Nix, Kenneth Fritzsche, Fernando Maymi
Department of Electrical Engineering and Computer Science, U.S. Military Academy,West Point, New York
Keywords: Software Architectures, Component-Based System
s, Component Composition, Multi-Agent Systems, Event
Correlation, Distributed Intrusion Detection.
Abstract: Event monitoring and correlation across a large network is inherently difficult given limitations in
processing with regards to the huge quantity of generated data. Multiple agent systems allow local
processing of events, with certain events or aggregate statistics being reported to centralized data stores for
further processing and correlation by other agents. This paper presents a framework for a secure and scalable
multiagent system for distributed event capture and correlation. We will look at what requirements are
necessary to implement a generic multiagent system from the abstract view of the framework itself. We will
propose an architecture that meets these requirements. Then, we provide some possible applications of the
multiagent network within the described framework.
1 INTRODUCTION
Correlating multiple sensor readings in real-time or
near-real-time is process intensive when the sensors
generate data at even a moderate rate. In our
experience, it is not uncommon for servers in large
organizations to generate over two gigabytes of
event data per day. Centralized correlation with any
but the simplest rules would be severely taxing to
process in near-real-time. However there is a
solution. Agent architectures are appropriate for
problems that require systems to meet a variety of
goals in a dynamic, unpredictable environment
(Maes, 1992) and multiagent systems provide a
distributed framework for problem solving that is
too large for a centralized agent to solve because of
resource limitations or the risk of having a
processing bottleneck or single point of failure
(Sycara, 1998). The definition and advantages of
autonomous agents are described in detail in AAFID
(Balasubramaniyan, 1998). This paper will examine
some of the requirements that are necessary to a
generic, hierarchical multiagent network designed to
capture events and perform event correlation,
present some architectural considerations that meet
those requirements, and discuss some potential
applications for the architecture.
2 REQUIREMENTS
In a multiagent system, the correlation workload can
be distributed so that only events or statistics of
significance are reported up the agent hierarchy.
Obviously, this system can only be successful if the
definition of interesting events can adapt to the ever-
changing environment of production networks.
However, when using a multiagent system to
distribute the correlation workload, we want the
architecture to preserve the security and integrity of
the entire system, and make use of the existing
sensors whose data we want to correlate.
In creating such a distributed multiagent
architecture, i
t is necessary establish a set of
requirements and constraints upon our system.
These are much like Silva et al’s “agent properties”
which they refer to as non-functional requirements
(Silva, 2003). They are desired system qualities that
are not necessarily required for agents to complete
their goals. These include requirements such as: (1)
the system must be scalable; (2) it must be relatively
simple to implement, configure and maintain; (3) it
must be secure, meaning that the traffic generated by
the correlation network can not be sniffed of
spoofed; (4) it must not be limited by the network
topology; (5) it must be self-healing; and (6) it must
be time-synchronized.
233
Nix T., Fritzsche K. and Maymi F. (2005).
ANATOMY OF A SECURE AND SCALABLE MULTIAGENT SYSTEM FOR EVENT CAPTURE AND CORRELATION.
In Proceedings of the Seventh International Conference on Enterprise Information Systems, pages 233-238
DOI: 10.5220/0002533602330238
Copyright
c
SciTePress

• Scalability
In terms of scalability, we want to be able to
grow our agent network as large as functionally
necessary regardless of the size of the network.
Depending on the application of the correlation
network and the established correlation rule set, we
could have as few as one agent for the entire sensor
network or as many as one agent per sensor (1 ≤ x ≤
n : x is the number of deployed agents and n is the
number of individual sensors on the network).
• Simplicity
In order to keep the agent deployment and
distribution complexity to a minimum, we want all
agents to be identical. In other words, the coded
representation of each agent is the same. However,
this does not mean that they all behave the same.
Each agent’s role and functionality is determined not
by its binary code, but by data in its configuration
file and the specific sensors it monitors.
Configuration modification can either be performed
on a host local to the agent or via a graphical user or
web based interface that communicates strictly with
the “uber-agent”. The configuration changes are
then disseminated to the necessary agents in the
logical agent hierarchy.
We also want to avoid the need to develop new
sensors or to modify existing ones so that they
integrate into our framework. Modifications to
sensors such as syslog or SNORT would seriously
complicate deployment and could undermine
security. To this end, we want the framework to tap
into the data stores of a large variety of widely used
sensors such as Microsoft® Windows™ auditing,
syslog, SNORT, as well as others found in such
devices as firewalls and Honeynets.
• Security
To enhance security and limit the traffic
generated by the correlation network, each agent is
configured so that it can only communicate with a
limited number of other agents. This prevents rogue
agents from being launched in order to corrupt or
control the correlation network.
Each agent should contain a message
management class which handles encryption and
decryption of message traffic and key management.
The message management class of one agent uses
asymmetric encryption to communicate with the
message management class of other agents. Using
asymmetric encryption allows for both encrypted
and digitally signed traffic. Encrypted traffic
prevents sniffing and signed traffic prevents
spoofing.
• Independent of physical network topology
The topology of the multiagent network is
independent of the physical network. Thus, the
employment of agents and sensors may or may not
match the topology of the physical network. The
only requirement is that agents must be able to
communicate. Agents that are adjacent on the
correlation network may be located on entirely
different subnets. For example, the correlation
network can be organized by sensor type with the
sensors being distributed one per subnet or logical
work unit. On the other hand, an agent hierarchy
could be built to handle all web servers in the
enterprise, regardless of where they are in the
physical network. This requires agent hierarchies to
be deployed across functional business units within
an organization. For this reason, we do not want to
restrict our multiagent network by constraints that
may not apply to the application.
• Self Healing
The distributed nature of the system and the
requirement that each agent’s code be identical
means that any agent can perform in the role of
another agent. Thus, there is built in redundancy
and we do not have a single point of failure within
the system. This allows our agent network to have a
method of recovering from the failure of a single
agent, i.e. the network is self-healing. Any agent
can assume the role of another agent in the logical
agent hierarchy, and the agent network thus becomes
resilient against attack or localized network failure.
The agent network needs to be able to recover
from the loss of one or multiple agents within the
hierarchy. It needs to be able to self-heal in the
event it loses communication with other agents in
the network. Within its configuration file, the agent
could contain the address of one or more generations
of its ancestry and progeny. Thus if communication
is lost in either direction, communication can be re-
established. In this manner, one (or multiple) failed
agent(s) does not result in the failure of an entire
subnet within the multiagent hierarchy.
• Time synchronization
The distributed design of the agent network
requires a system be implemented for network time
synchronization. This is particularly important when
performing correlation of events across distributed
sensors/hosts to resolve relative order of events and
determine causality between events (Karp, 2003).
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
234
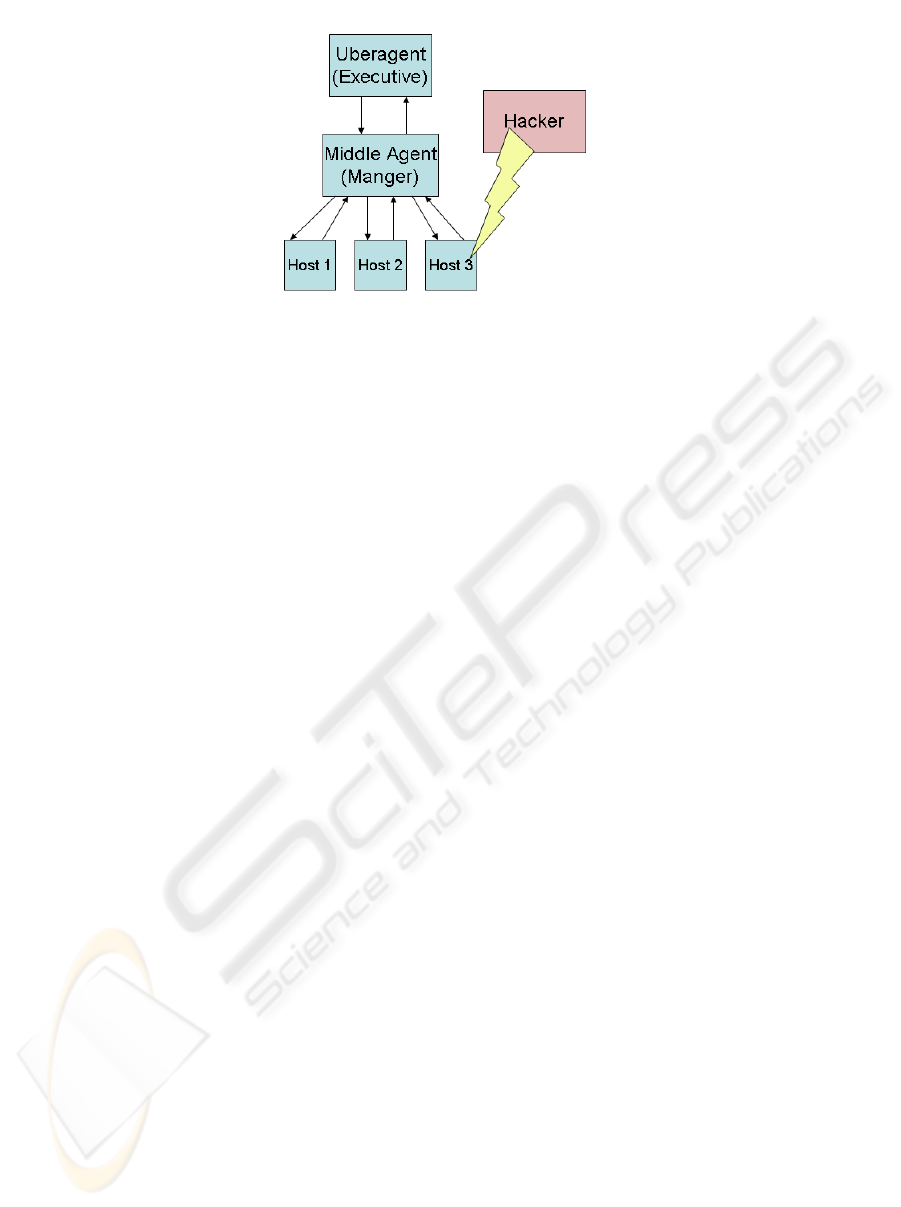
Figure 1: Agent Roles and Hierarchy. The above illustrates a malicious act (as defined in the agent’s rule set) on
Host 3. This in turn triggers the agent to send a report to the next higher agent in the hierarchy
3 ARCHITECTURE
CONSIDERATIONS
With these requirements in mind, we next strive to
develop an architecture that meets these
requirements while maintaining a degree of
independence from the actual application for which
it will be used. Our architecture consists of the
agents, which consult (correlate) sensor data. They
do this by querying the sensors’ data repositories
and the sensors themselves, which provide the data
tracking vital dimensions of the problem space. An
agent consists of a communication package that
provides secure communications with other agents; a
query engine that can formulate database queries and
search XML or flat files for specific information
(still field based); and a correlation engine which
processes query results and generates alerts and/or
query replies to/from another agent. The agents are
organized hierarchically with one agent at each tree
or subtree root designated as the “uber-agent” as
shown in Figure 1. A user interface ties into the
“uber-agent” for managing the multiagent network.
• Sensors
In the context of this architecture, a sensor is
anything that logs updates of a changing state either
internal or external to the network. In the classical
context, a sensor may measure or record physical
phenomena such as temperature, air pressure, light,
etc. But, a sensor could also “measure” a given
dimension of the network, by tracking packets or
logging events. Sensors can be imbedded in the
operating system as proposed by Kerschbaum
(Kerschbaum, 2000), or separate processes.
Examples of such sensor measurements or
recordings include log files produced by syslog, a
firewall log, an alert log generated by an intrusion
detection system, Windows™ events, etc. A sensor
must satisfy two constraints: (1) it must measure a
necessary dimension of our problem space; (2) and it
must record its measurement in some sort of
datastore. The datastore is not required to be on the
same host as the sensor. We have thus far restricted
a datastore to one of three formats (though others are
possible): a relational database; an XML file; or a
text file.
• Agents
An agent is a self-contained process that has the
ability to perform queries on a datastore, correlate
the results of the queries in accordance with the
agents query rules, and communicate with other
agents. Communication takes the form of queries,
query results, or configuration changes.
Communication is secure, meaning that the traffic
can not be sniffed of spoofed.
The agent network is hierarchical in nature. At
the top, a graphical or web-based interface
communicates with the “uber-agent”. The “uber-
agent” communicates with several “sub-agents”
and/or sensors. This can be seen in Figure 1. These
“sub-agents” communicate with one or more “sub-
agents” and/or sensors, recursively. Dispersion of
agents matches the distribution of the datastores
across the network. An agent is co-located on the
same host as a datastore. One agent suffices to
query all datastores located on a single host.
• Correlation Engine
The correlation engine is part of an agent. Within
the context of our architecture, the correlation
engine consists of two parts: (1) data correlation;
and (2) alert generation. Data correlation stems
from simple and compound Boolean and relational
operations on data queries. A compound Boolean
expression, or signature, can be easily parsed and
transformed into one or more queries of the
datastore. At this level, data correlation is a matter
of pattern matching the data within a datastore to a
signature (i.e. misuse detection).
Should a signature be matched then that may be
enough to generate an alert. In fact, this is how
many intrusion detection systems work. The
problem with this approach is that it is limited to
ANATOMY OF A SECURE AND SCALABLE MULTIAGENT SYSTEM FOR EVENT CAPTURE AND
CORRELATION
235

matching known signatures. We also need a way to
recognize hidden or new correlations for which we
have no signatures. One way of doing this is
through anomaly detection based on a statistical
analysis of “typical” network data. We register
“normal” data over time and generate an alert when
the correlation of data from one or more sensors flag
“abnormal” behaviour (i.e. anomaly detection).
The architecture presented in this paper really is a
framework which is independent of “how” the
correlation is done. All agents can correlate their
data in an identical manner, or agents can be
specialized as in (Chatzigiannakis, 2004). Our
architecture is suitable for use as a research platform
for exploring distributed AI. Furthermore, the
modular design of our framework makes it possible
for various agents to correlate events differently and
still maintain their sociability.
• Configuration
A configuration file for a given agent provides
the agent with the information it needs in order to
understand its environment. The configuration file
will contain information regarding one or more
levels of the agent’s “parent” and “children”
depending on the level of self-healing desired by the
agent network. Additionally, information is also
contained in the configuration concerning the sensor
datastore(s) for which the agent is responsible. The
agent’s configuration is also established by a set of
correlation rules that it applies locally on its own
datastores.
4 APPLICATIONS
Our multiagent architecture is generic enough to be
the basis for implementation in multiple
applications. An example of a possible deployment
of the multiagent network is shown in Figure 2 in
which we see sensors distributed throughout a
network. Each sensor logs its data either locally on
the same host or remotely to a different host. Sensor
logs take the form of a relational database, an XML
file, or a text file. Agents are distributed throughout
the system as well. To minimize the potential of
queries being attacked, agents are collocated with
the sensor logs. Agents query sensor logs and
correlate the results. Based on the correlation rules,
the agents could disseminate the results of its
correlation to other agents for further action. Agents
can have access to a special data store known as the
central logging facility (CLF). The CLF can store
either results of reports generated by agents, or raw
sensor data used for further correlation. The intent
is for storage of query results pending further action,
correlation rules, configuration rules, etc. The
multiagent network is hierarchical in structure and
managed at the root by a user interface.
The architecture discussed in this paper was
primarily developed for correlation of intrusion
detection systems with system and network logs.
The abstract and modular structure of the
architecture makes it easy to implement for
correlating any sensor network. In this or similar
contexts, we could use the system to implement a
system monitor or an intrusion detection system.
We could also use the system to guide forensics of a
network attack either as part of the network or as
part of a honeynet. Or, we could use the same
architecture in an entirely different way for
environmental monitoring.
• System monitor
A system monitor could perform data mining and
correlation on any logging process that monitors the
state of a host, network, etc. In this context, sensors
take the form of system logs such as syslog, httpd
log, firewall log, router log, etc. Agents then
perform distributed queries on the datastores (logs)
of these sensors. Correlation rules are developed in
order to match specific contextual criteria. For
example, a rule could be developed to return data
associated with events within a given time frame, or
generate an alert if a certain number of failed log-
ins, power interruptions, or other event of
significance occurs within a specified time. From
these rules and queries, the overall status of a
network, functional systems (like all web servers
within an enterprise) or workstations within a
business unit can be determined and reported.
• Intrusion detection
One of the problems with many available
intrusion detection systems is determining the proper
balance between rules that produce an excessive
number of false positives or potentially allow a false
negative. In the first case, the network administrator
wastes time chasing after ghosts, and in the second,
a wily hacker remains undetected while having free
reign of the network.
Using multiple individual intrusion detection
systems as sensors (such as Snort, Border Guard by
StillSecure, Cisco IDS, etc), forming a distributed
IDS or dIDS (Einwechter, 2001), the multiagent
network could potentially correlate the alerts
generated by the multiple IDS with other system
logs. For example, the IDS would log alerts to a file
or database. An agent would query an associated
IDS log and correlate the results with the results of
other agents and their queries on other IDS or
system logs in order to reduce the number of false
positives generated. Additionally, the multiagent
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
236
network could look for variations of attempted
attacks by taking a rule which generated an alert and
querying the system for data regarding things like all
traffic from the attacking host, all traffic directed to
the attacked port, etc. A different strategy might be
to correlate the results of various statistical-based
IDS with the results of other rule-based IDS. Then,
the agent could develop new rules for the rule-based
IDS based on the results.
Optionally, we could develop an IDS from
scratch that is rule-based, statistical-based, neural
network based, or based on any potential new
research in intrusion detection. Using a packet
sniffer that promiscuously logs all subnet traffic, the
agent network could look for patterns in the data.
For a rule-based approach, the agent’s local query
rules would be developed that match a potential
attack signature. Queries on the sensor logs would
be executed by the agents. Positive returns on the
queries would generate an alert. Used in
conjunction with perhaps a statistical correlation
engine, or a domain specific AI, a sophisticated
network IDS could be developed.
• Forensics
In the event that we detect a successful
penetration of our network “after the fact”, we will
ideally need to pull our network offline and study
how the hacker succeeded. In this scenario,
computer forensics is a means to analyze the
network events in order to determine what occurred
during the attack. Good forensics will help us
“generate” proper IDS rules to prevent hackers from
using the same method of attack in the future. Our
agent network, using the same sensor setup as used
in intrusion detection or system monitoring can
easily be used for forensics. Here, with an agent’s
configuration, correlation rules are generated at the
interface in accordance with the demands of the
security administrator. Thus, the administrator
would select the constraints with which to filter
network data. These constraints would be
transformed into the agent network’s query language
and disseminated through the network as
appropriate. Each agent would receive some form of
the original query, parse the query, forward the
query in part or in whole, and perform queries on its
local datastores, as necessary. The results received
from an agent’s “children” are then consolidated
with the results of the local queries and passed up to
the agent’s parent. The “uber-agent” passes the
results to the interface which displays them for the
administrator. Using this technique, a security
administrator should be able to narrow down which
network traffic applied to the hackers attack and
glean from the logs an attack’s modus operandi.
Additionally, by exporting log data and reports off a
compromised machine to the CLF on a recurring
basis allows a redundancy that can be used to
compensate for suspect logs from a hacked machine.
• Environmental monitoring
A completely different context for the same agent
network would be one where the network sensors
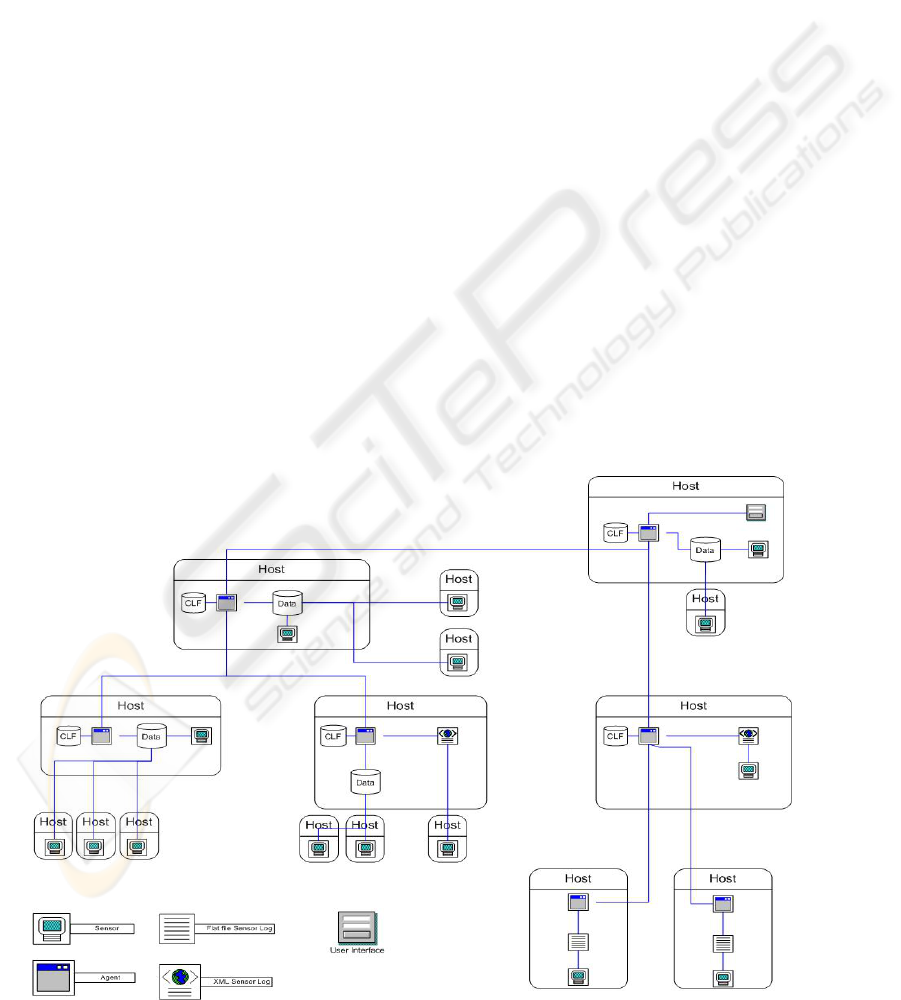
Figure 2: Picture depicting how sensors, agents and datastores can be deployed across a netwrok. Sensors must
create logs, either on the local host or at a distributed log site. For each host with a log data store, there is a co-
located agent that can query the data store and send information to agents higher in the hierarchy.
ANATOMY OF A SECURE AND SCALABLE MULTIAGENT SYSTEM FOR EVENT CAPTURE AND
CORRELATION
237

were actual physical sensors. Sensors such as those
that measure power consumption, temperature,
humidity, air pressure, wind speed, perhaps digital
camera, motion detectors, or just about anything that
digitally records a physical parameter can be used.
Examples of correlating such data would be to
generate an alert if the temperature dropped more
than ten degrees in an hour. This type of system
could be part of an IDS, a means to protect
equipment sensitive to changes in
weather/conditions, etc.
• Alert conditions (holistic vs. local)
By correlating sensor data across the entire
network, we can potentially generate one alert
condition for a local host or subnet and a different
alert condition for the entire network. A local alert
condition may be high if hacker penetration is
eminent, but the services on the affected host are
minimal enough that the host’s compromise would
not provide the hacker with much useful
information. For example, an agent is monitoring a
honeypot and an intrusion is detected. The result
would be a low alert condition for the network.
Also, we could change the rule set that an agent uses
based on the alert level - additional parameters could
be monitored, certain events could automatically be
forwarded to the CLF of the “uber-agent”, etc.
Another example, in an IDS application, if a
subnet was recently port scanned, it might set its
alert condition to “red” and use a looser set of rules
that would otherwise have generated a high number
of false positives. Other agents within the system
could be notified of the threat and adjust their threat
condition accordingly. The alert condition for high-
value targets would be set to “red”, some subnets
might increase to “amber”, and low-value systems
might not change at all.
In an environmental monitoring system, perhaps
the agents query sensor logs once every 15 minutes.
If one of the sensors record a drastic change
(temperature, air pressure, etc.) within one or more
monitoring periods, the agents could be set to query
the sensor logs once every minute.
5 CONCLUSIONS
A multiagent architecture shows great potential for
solving problems in a distributed manner that a
single agent could not process in a timely manner.
Research in this area tends to focus on ways to
implement a cooperative artificial intelligence. The
architecture presented in this paper provides a means
to separate the AI from the other important aspects
of a multiagent system. The modular design allows
for easy research, testing, and application of
distributed AI systems in a variety of contexts. The
scalability, simplicity, security, and robust nature of
the architecture provide a common structure in
which to compare and contrast competing paradigms
for learning, cooperation, network timing, etc.
REFERENCES
Balasubramaniyan, J., Garcia-Fernandez, J., Isacoff, D.,
Spafford, E., Zamboni, D. (1998, December). An
Architecture for Intrusion Detection using Autonomous
Agents. Proceedings of the Fourteenth Annual
Computer Security Applications Conference, pages 13-
24. IEEE Computer Society. Retrieved from http://
www.cse.buffalo.edu/~sbraynov/seminar%202004/pap
ers/zamboni-agents1.pdf
Chatzigiannakis, V., Androulidakis, G., Grammatikou, M.,
Maglaris, B. (2004, June) A Distributed Intrusion
Detection Prototype using Security Agents. In 11th
Workshop of the HPOVUA.
Einwechter, N. (2001, January 8).An Introduction to
Distributed Intrusion Detection Systems. Retrieved
from http://online.securityfocus.com/infocus/1532.
Gopalakrishna, R., Spafford, E. (2001) A Framework for
Distributed Intrusion Detection using Interest Driven
Cooperating Agents. Purdue University. Retrieved
from http://www.raid-symposium.org/raid2001/slides/
gopalakrishna_spafford_raid2001.pdf.
Karp, R., J. Elson, D. Estrin, and S. Shenker. (2003, April
11). Optimal and Global Time Synchronization in
Sensornets. Center for Embedded Networked Sensing
Technical Report 0012. Retrieved from http://www.
eecs.harvard.edu/~mdw/course/cs263/fa03/papers/time
sync-techrept03.pdf.
Kerschbaum, F., Spafford, E., Zamboni, D. (2000,
November). Using embedded sensors for detecting
network attacks. Proceedings of the First ACM
Workshop on Intrusion Detection Systems. Retrieved
from http://www.cerias.purdue.edu/homes/zamboni/
pubs/wids2000.pdf.
Maes, P. (1992) Modeling Adaptive Autonomous Agents.
Artificial Life Journal, Vol 1, No 1&2, pp 135-162.
MIT Press.
Silva, C., R. Pinto, J. Castro, and P. Tedesco. (2003,
November 27-28). Requirements for Multi-Agent
Systems. Workshop em Engenharia de Requisitos,
Piracicaba-SP, pp 198-212.
Sycara, K. (1998) Multiagent Systems. AI Magazine, Vol
19, No 2. pp. 78-92. Retrieved from http://www-
2.cs.cmu.edu/~softagents/papers/multiagentsystems.PD
F.
ICEIS 2005 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
238
