
An Energy Efficient Multiagent Middleware for Physical
Complex System
Jean-Paul Jamont
1
, Michel Occello
2
and Andr
´
e Lagr
`
eze
2
1
Institut National Polytechnique de Grenoble, LCIS, 26000 Valence, France
2
Universit
´
e Pierre Mend
`
es, LCIS/INPG, 26000 Valence, France
Abstract. Open physical complex artificial systemsinvolve wireless autonomous
entities submitted to strength constrainted energetic policies. Their features natu-
rally lead to apply multiagent techniques to ensure both the autonomy of entities
and the best whole system organization. We propose a multiagent approach for
wireless communication robust management for such physical system using self-
organization mechanisms. We show the performances of this approach by com-
parison to usual wireless protocols. The genericity of our contribution is high-
lighted by the proposition of a middleware layer integrated in agent. We give an
insight to a real world instrumentation application using the middleware.
1 Introduction
A complex system can be defined as composed of many elements which interact each
other and with their environment. These interactions are often non-linear and gener-
ally contain feedback loops. At the global level, these systems are characterized by
the emergence of not observable phenomena at a local level: an external observer will
understand differently the system than an internal observer. Complex systems are thus
characterized by the emergence at a global level of new properties and of a new dynamic
which is not easily predictible from the observation and the analysis of the elementary
interactions.
Working with physical systems like collective robotics or massive instrumentation
imposes the use of wireless technology. The features of such complex cognitive physical
system leads to naturally apply multiagent techniques to ensure both the autonomy of
entities and the best whole system organization [3].
This paper presents the different steps of the design of an energy efficient middle-
ware. In a first section we present the necessity to adopt a message oriented middle-
ware (MOM) for our applications. We then propose our multiagent approach based on
self-organization to manage the communication of these decentralized embedded nodes
networks. We give finally an insight to some quantitative results showing the benefit of
a multiagent approach compared to traditional protocols in a real world application of
an underground river system intrumentation.
Jamont J., Occello M. and Lagrèze A. (2005).
An Energy Efficient Multiagent Middleware for Physical Complex System.
In Proceedings of the 1st International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 72-81
DOI: 10.5220/0001196200720081
Copyright
c
SciTePress

2 Necessity of an energy efficient MOM
Our research works deal with embedded multiagent systems (MAS) like collective ro-
botics or physical instrumentation. Considering complex embedded control systems as
networks of decentralized cooperative nodes is an attractive way to design physical in-
telligent applications [6,3].
Multihop communication. In wireless networked system, communication between
two hosts is generally not direct. To communicate, entities require help from other hosts
(multihop communication). Such a requirement creates an important routing problem
because the location updating of neighbors is difficult. All adapted wireless routing
protocols use flooding technics. In a flooding technique, a host gives the message to all
its neighboors which do the same. These wireless protocols can be classified by their
families : The reactive protocols using no routing table, the proactive protocols using
routing tables, periodically updated and hybrid protocols adopting a reactive protocol
behavior and, if necessary, using routing tables for increasing efficiency.
Limited power ressources. Agents have limited power ressources. One of the
whole system aim is so to reduce as much as possible the energy expense. When they
have nothing to do generally for sparing energy they enter in a sleep mode. When they
communicate they must use good routing protocols and optimal ways (generally the
criteria will be the number of hops). But they must decrease as much as possible the
flooding scheme because the associated power cost is very high. An agressive environ-
ment like underground river system (as for one of our applications) can cause some
internal faults for agent. The communication infrastructure must be very adaptive, fault
tolerant and self-stabilized : an agent failure must not have an important impact on the
system. This system must provide reliable communications and, sometimes, must adapt
to ”real-time” constraints. Furthermore, in the case of mobile devices the infrastructure
of sytems are not persistant.
Message oriented middleware. We need to design a mobile communication man-
agement layer to manage the wireless communications between the different agents in
the system. This layer must increase interoperability, portability and flexibility of an
application by allowing the application to be distributed over multiple heterogenous
agents. It must reduce the complexity of agent development. This layer will be a Mes-
sage Oriented Middleware (figure 1).
3 A multiagent approach to design energy efficient MOM
3.1 Multiagent systems
Multiagent method. Multiagent methods aim at decreasing the complexity of system
design by a decentralized analysis. We will follow the method of multiagent design dis-
cussed in [7] based on the AEIO according to four axes collectively accepted today:
The agent aspect gathers all elements together for defining and constructing these en-
tities. The environment aspect for dealing with the analysis of environment elements
and with capability such as the perception of this environment and the actions one can
do on it. The interaction aspect includes all elements which are in use for structuring
73
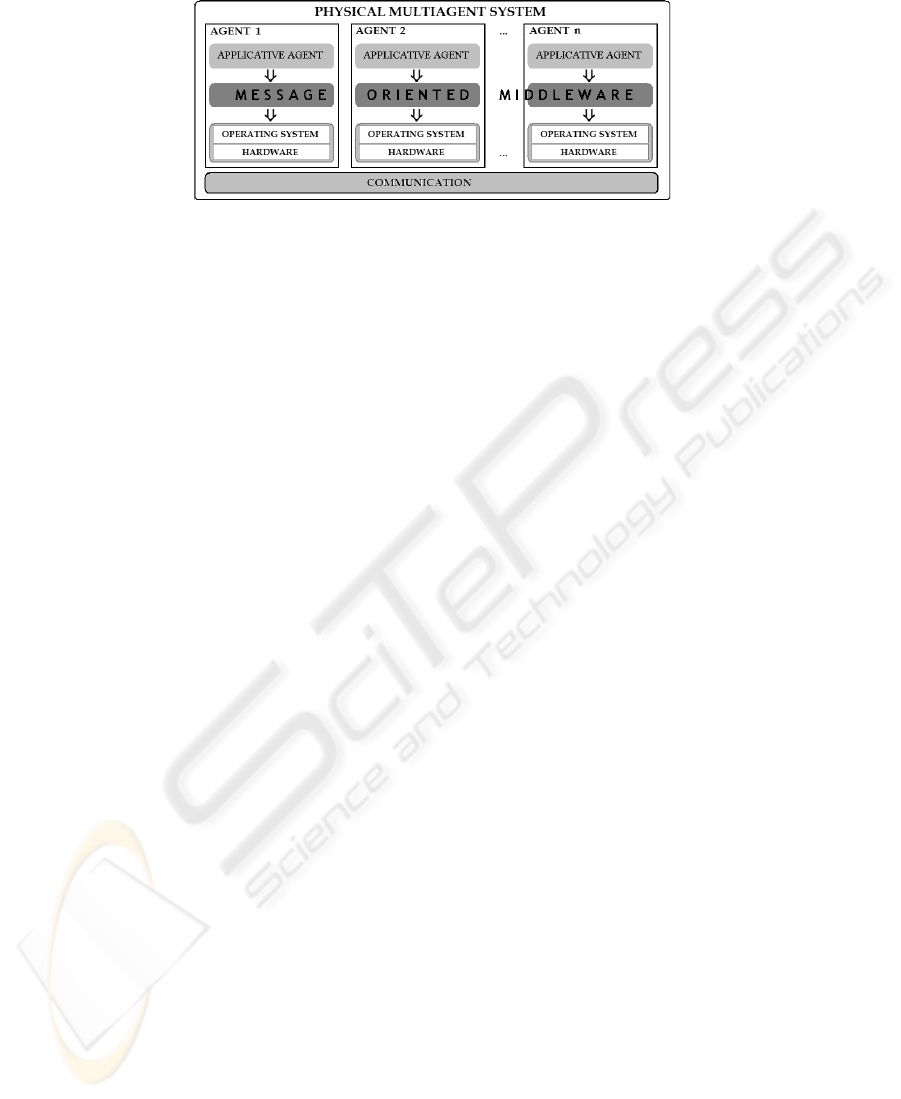
Fig.1. Our embedded multiagent system architecture
the external interactions among the agents (communication language, interaction proto-
cols). The organization aspect allows to order agent groups in organization determined
according to their roles.
Multiagent systems and wireless networks. The distributed and open nature of
sensor networks means that the multiagent approach is an adapted answer. Another ad-
vantage of this approach is the external representation of the interactions and of the
organization. External representations offer multiple possibilities such as the monitor-
ing by an external observer.
A few works reaching the same objectives show that the approach is interesting. We
can quote the ActComm [2] project which is a military project for which the routing of
information is essential: it aims at studying the communication management between
a soldier team and a military camp via a satellite. We can also mention the work on
wireless networks of mobile autonomous intelligent sensors [9] where agents are used
to achieve open flexible cell assembly.
Our Message Oriented Middleware (MOM) must be economic in an energy point of
view : it is one of the main differences with the other works on multiagent based mid-
dleware [1,5].
3.2 The agent aspect
An agent is a software entity situated in an environment which it can perceive and in
which it acts. It is endowed with autonomous behaviors and has objectives. Autonomy
is the main concept in agent issue: it is the ability of agents to control their actions
and their internal states. The autonomy of agents implies no centralized control. The
power of an agent decomposition is the decentralization of the intelligence, i.e. the
decision capabilities, and of entities’ knowledge. A MAS is a set of agents situated in a
common environment, which interact and attempt to reach a set of goals. Through these
interactions a global behavior can emerge. The emergence process is a way to obtain,
from cooperation, dynamic results that cannot be predicted in a deterministic way.
These agents have hybrid architectures, i.e. a composition of some pure types of
architectures. Indeed, the agents will be of a cognitive type in case of a configuration
alteration, it will be necessary for them to communicate and to manipulate their knowl-
edge in order to have an efficient collaboration. On the other hand, in normal use it will
74
be necessary for them to be reactive (stimuli/response paradigm) to be most efficient.
All the agents have the same communication capabilities but the communicated data
depend of their roles.
3.3 The environment aspect
This part of the analysis deals with elements necessary for the MAS realization such as
the perception of this environment and the actions one can do on it. The environnement
can be [10]: Accessible, if an agent using the primitives of perception can determine
the state of the environment. When an environment is inaccessible it is then necessary
for the agent to memorize features in order to record the modifications which occur.
Determinist, or not, according to whether the future state of the environment is, or not,
fixed by its current state and the actions of the agent. Episodic if the next state of the
environment does not depend on the actions carried out by the agents. Static if the state
of the environment is stable while the agent reasons. Discret if the set of the feasible
actions and states of the environment is finished.
The environment will be made of measurable information. It is deterministic, non
episodic, dynamic and continuous. Agents can move in this physical environment but
don’t know their position.
3.4 The organization aspect
In this type of application no one can control the organization a priori. Relations be-
tween agents are going to emerge from the evolution of the agents’states and from their
interactions. We are going to be content with fixing the organization parameters, i.e.
agents’tasks, agents’roles.
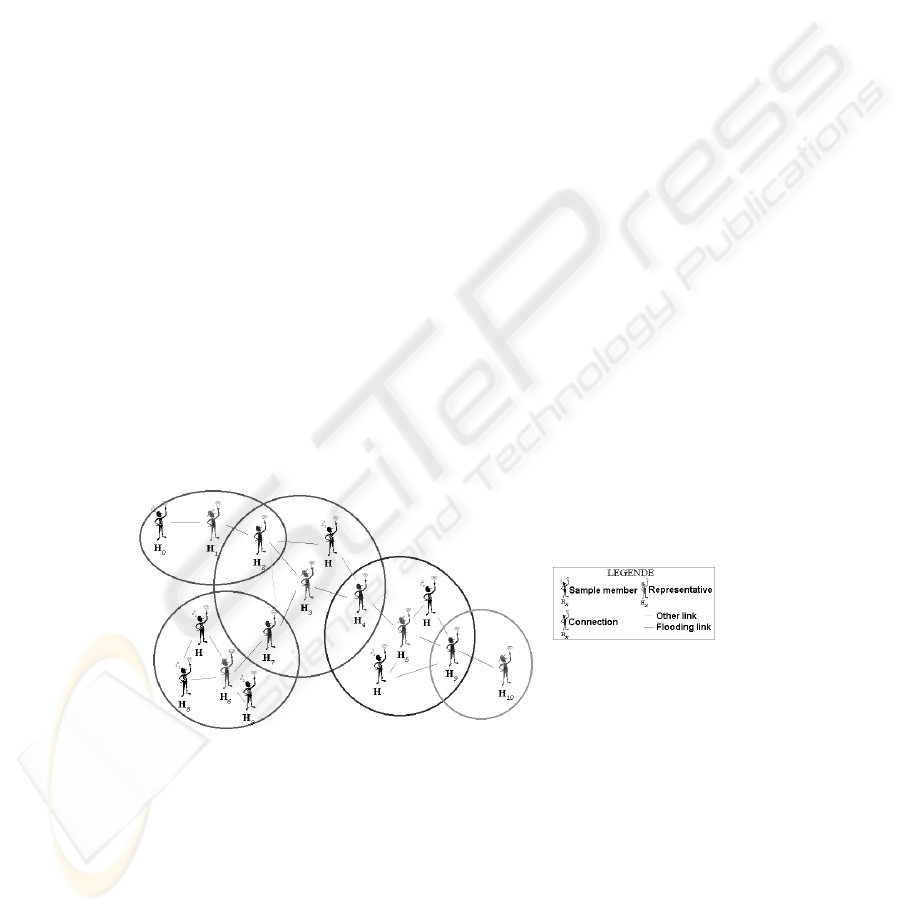
Fig.2. Group organization
Our organizational basic structures are constituted by (see fig 2) : one and only
one group representative agent (r) managing the communication in its group, some
connection agents (c) which know the different representative agents and can belong
75

to several groups, some simple members (s) which are active in the communication
process only for their own tasks.
With this type of organizational structure, the message path between the source (a)
and the receiver (b) is ((a, r),
∗
[(r, c), (c, r)], (r, b)). If the source is a representative
agent the first term doesn’t exist. If the receiver is a representative agent the last term
doesn’t exist.
Because a representative agent is the most sollicited agent in a group, the best one
is the one having the most important level of energy and the most important number
of neighbors. We use a role allocation based self-organization mechanism involving the
election of a representative agent based on a function which estimates the adequation
between its desire to be the boss and its capacity to be: so the organization is modified
only when a problem occurs. We don’t try to maintain it if we have no communication.
The energy saving is obtained owing to the fact that the flooding is only directed to
the representative agents of the groups and to some connection agents. To give an order
of idea, a receiver path research with flooding techniques will cost, in the case of a
traditional wireless network, a number of emissions equal to the number of stations. In
the case of a clustered wireless network, the number of transmitted messages are about
twice the numbers of representative agents (all the representative agents are contacted
via one connection agent ).
However, the networks with an organizational structure must take care of the main-
tenance of their routing table. Generally, the adaptive features of these tables come from
periodical exchanges between the different nodes. In our approach we do not wish to
use this technique to ensure the maintenance of coherence. Indeed, our principle will
be ”if we do not need to communicate, it is useless to spend energy to ensure the co-
herence maintenance”. However, we will thus use eavesdropping of surrounding agent
communications. We extract knowledge from these messages exchange to update our
beliefs about our neighboors. Moreover, our self-organization mechanism will integrate
an energy management policy. These structures will thus emerge.
Our algorithm (figure 3) can be adjusted by other agents’ suggestions such as an
organization inconsistency. Moreover, an agent can give up its role because its power
level quickly fall or fall under a limit that the agent thinks dangerous for its integrity.
So it can become a sample member.
3.5 The interaction aspect
The agents will interact only with the agents in acquaintance. Agents interact by asyn-
chronous exchange of messages. Among the different protocols that we use, the choice
of an introduction protocol is essential. Indeed, this protocol allows to the agents to
be known, i.e. to bring their knowledge and their know-how to the agents’ society. An
other important protocol is the ”best representant election” protocol seen previously.
These protocols are an arrangement of some of the thirteen different types of small
messages defined in the following: WhoAreMyNeighbors is used by an agent to know
who its neighbors are. This message is transmitted when an agent is created (the first
goal of a new agent is to know its neighbors) or when an agent feels that its neighbor
table is not coherent with reality. IAmOneOfYourNeighbors makes it possible for an
agent to answer the preceding request. With this message, it thus provides its identifier,
76
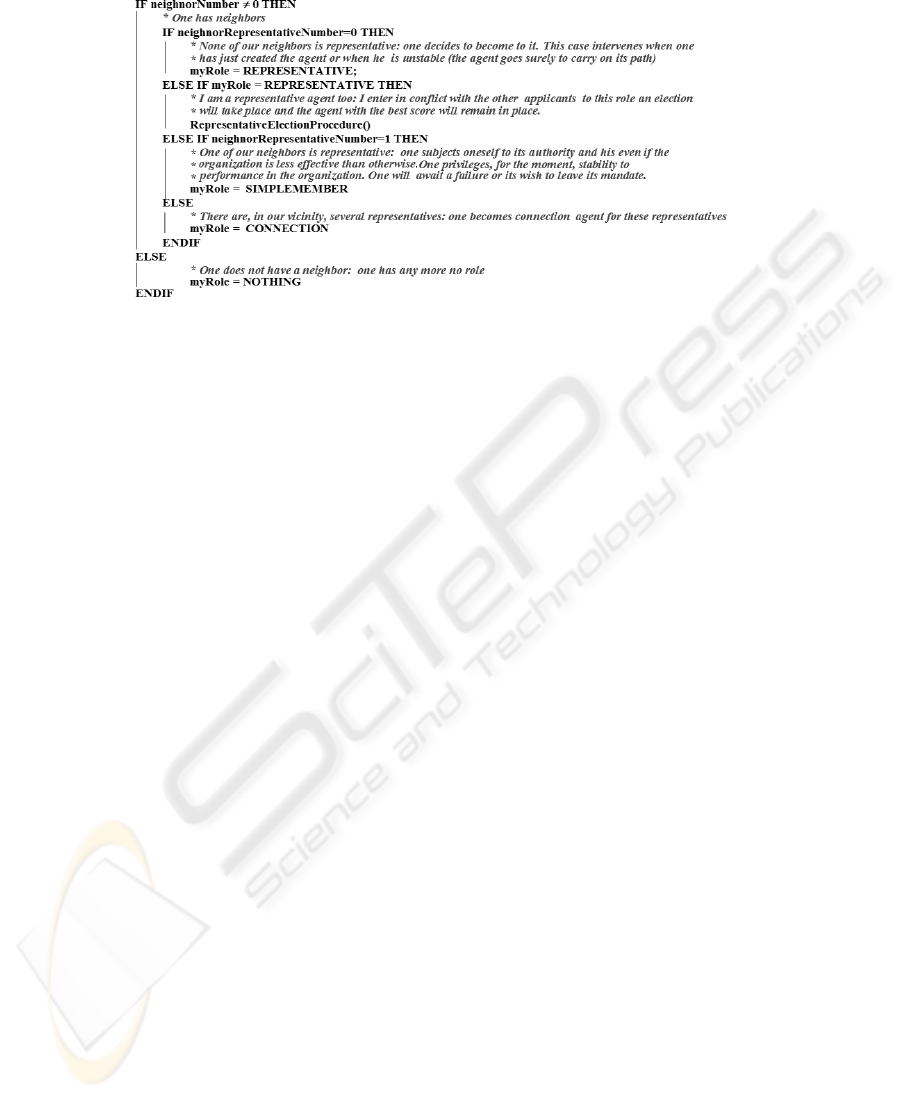
Fig.3. Self-organization algorithm
its role and its membership group. IChangeMyRole is used by any agent to inform its
neighbors that it decides to change its role. AskConnectionAgentGroup is used by rep-
resentative agents which want to update their knowledge on the close groups. It obliges
the connection agent to answer. AnswerConnectionAgentGroup is used by a connec-
tion agent to announce to a representative agent the other representative agent that it
can contact. VerifyNeighborGroupConsistency is sent by an agent, to its representative,
which believes to have detected an inconsistency with a close group. There is an in-
consistency between two groups when two agents of different groups see themselves
and their representative cannot communicate with a short path (fixed by a time-to-live).
ConflictRepresentativeResolution is used by a representative agent, in conflict with one
or more other representative agents, to communicate its score. ISuggestYouToBeRep-
resentative is a suggestion given by a representative to one of the agents of its group.
FindPacketPath is used by a representative agent which wants to know the path (list
of representative agents) to join another agent. PacketPathResult is the answer of the
representative of the recipient of the F indP acketP ath message. ACKMessage is a
configuration message used to confirm to the transmitter that its message arrived to its
destination. BadWay is a message sent by a representative who noticed a problem. This
message takes the erroneous road and the organization verifies its consistency. Encap-
suledData is a message which encapsulates data.
For example, the introduction protocol consists in transmiting WhoAreMyNeigh-
bors, receiving the answer of neighbor agents (IAmOneOfYourNeighbors), choosing a
role according to the algorithm (figure 3) and transmiting a IAmOneOfYourNeighbors
message.
4 Implementation and evaluation
4.1 Implementation
Therefore, we will demonstrate the feasibility of our approach in the case of the instru-
mentation of an underground hydrographic system [3]. In a subterranean river system,
77

the interesting parameters to measure are numerous: temperature of the air and the wa-
ter, air pressure, pollution rate by classical pollutants, water flow, draft speed etc. All
these information will be collected at the immediate hydrographic network exit by a
workstation. These data will be processed to activate alarms, to study the progress of a
certain pollution according to miscellaneous measuring parameters, to determine a pre-
dictive model of the whole network by relating the subterranean parameters measures of
our system with the overground parameter measures more classically on the catchment
basin.
We have chosen for sensors a classical three-layers embedded architecture. We use
the physical layer which is employed by NICOLA system, a voice transmission system
used by the French speleological rescue teams. This layer is implemented in a digital
signal processor rather than a full analogic system. Thereby we can keep a good flex-
ibility and further we will be able to apply a signal processing algorithm to improve
the data transmission. The link layer used is a CAN (Controller Area Network) pro-
tocol stemming from the motorcar industry and chosen for its good reliability. The
applicative layer is constituted by the agents’ system. A hybrid architecture enables
to combine the strong features of each of reactive (to the message) and cognitive capa-
bilities (to detect inconsistency and re-organisation ). The ASTRO hybrid architecture
[6] is especially adapted to a real time context. The integration of deliberative and reac-
tive capabilities is possible through the use of parallelism in the structure of the agent.
Separating Reasoning/Adaptation and Perception/Communication tasks allows a con-
tinuous supervision of the evolution of the environment. The reasoning model of this
agent is based on the Perception/Decision/Reasoning/Action paradigm. The cognitive
reasoning is thus preserved, and predicted events contribute to the normal progress of
the reasoning process.
The communication module calls the MAS middleware services supplied through
a component. The agent must use a WCommunication package, write in Java lan-
gage and translated into C++ langage because a lot of physical plateforms use this
langage. This package contents two abstracts classes (Identifier and Message)
and two main classes called Communication and BitField. In the Message ab-
stract class the designer must implement the primitives to convert the message in a bit
field (BitField MessageToBitField(Message m) and the recipocal primi-
tive Message BitFieldToMessage(BitField b)). In the Identifier abstract
class the designer must implement the type of identifier and two primitives BitField
IdentifierToBitField()and Message BitFieldToMessage(BitField
b). The primitive to convert the identifier in a bit field must be implemented by the de-
signer. The Communication class contains a list of couples (Identifier,Message)
for the emission and the reception. This list is private and must be accessed via Bool
SendMessage(Identifiant, Message)and CoupleIdentifierMessage
ReceiveMessage().
The package must be connected to the operating system. The operating system
must give the battery energy level (primitive SetBatteryLevel(Float l) to the
Communication class and must give the bit field which arrives. In an other hand, the
middleware gives to the operating system the bit field to send by calling BitField
GetBitFieldToSend().
78

These agents are embedded on autonomous processor cards equipped with com-
munication modules and with measuring modules. The KR-51 (the real time kernel’s
name) allows multi-task software engineering for C515C microcontroller. We can pro-
duce one task for one capability. We can then quite easily implement the parallelism
inherent to agents and satisfy the real-time constraints.
4.2 Evaluation
In order to evaluate and improve such agents’ software architectures and the coopera-
tion techniques that they involve, we introduce a simulation stage in our development
process. The simulation first allowed us to experiment our approach and the software
solutions that we provide for the various problems.
The simulation step. The simulation software structure is very basic. We have two
types of components: SimSensor and SimNetwork. A SimSensor component simulates
the sensor behavior. It possesses its own model and architecture. All the sensors have
the same communication capabilities. They transmit their requests to the SimNetwork
component which sends this information to all sensors which can receive them, in the
environment. SimNetwork can appear as the inference mechanism for the simulation.
We have compared our MAS to three traditionnal solution based on ad-hoc pro-
tocols. The DSDV protocol (Destination-Sequenced Distance-Vector protocol [8]) and
the natural DSR protocol (Dynamic Source Routing protocol [4]) do not appear in this
comparaison because its efficiency were lower than the ehanced version of DSR which
uses a route maintenance (memorization of the main route). We thereafter call efficiency
the ratio between the theoretical useful volume of the optimal way divided by the vol-
ume of each transmitted communication.
Case of an application with unidirectional communication. All agents communicate
only with the workstation situated at the end of the undergound river system : it is a
unidirectionnal protocol. In this case, messages are small. For this example, three mes-
sages are send by five seconds. The same scenario is applied for the different protocols.
We can see that the benefit (fig 4) of our approach is important. Our routing method
can deliver quickly all messages with a good efficiency. Higher is the number of sensors
better is the reactivity of our approach. We must note that if the system knows no per-
tubation or mobility variation of DSR will be better from an efficiency point of view is
normal because in this case DSR learns all the routes (succession of sensors) allowing
to communicate with the workstation. It is not really the case of our approach which
reasons about the group and not from the sensors. One consequence is that the routes
used by the messages with our approach are not optimal. We can see that our approach
support the addition of a lot of sensors. The number of groups don’t explose with the
number of sensors but their density increases.
Case of an application with multidirectionnal communication. In this case, we en-
visage communication between collaborative sensors. We choose to give to the message
a size of thirty bytes (elaborated measure). In this case the behavior of our approach is
79
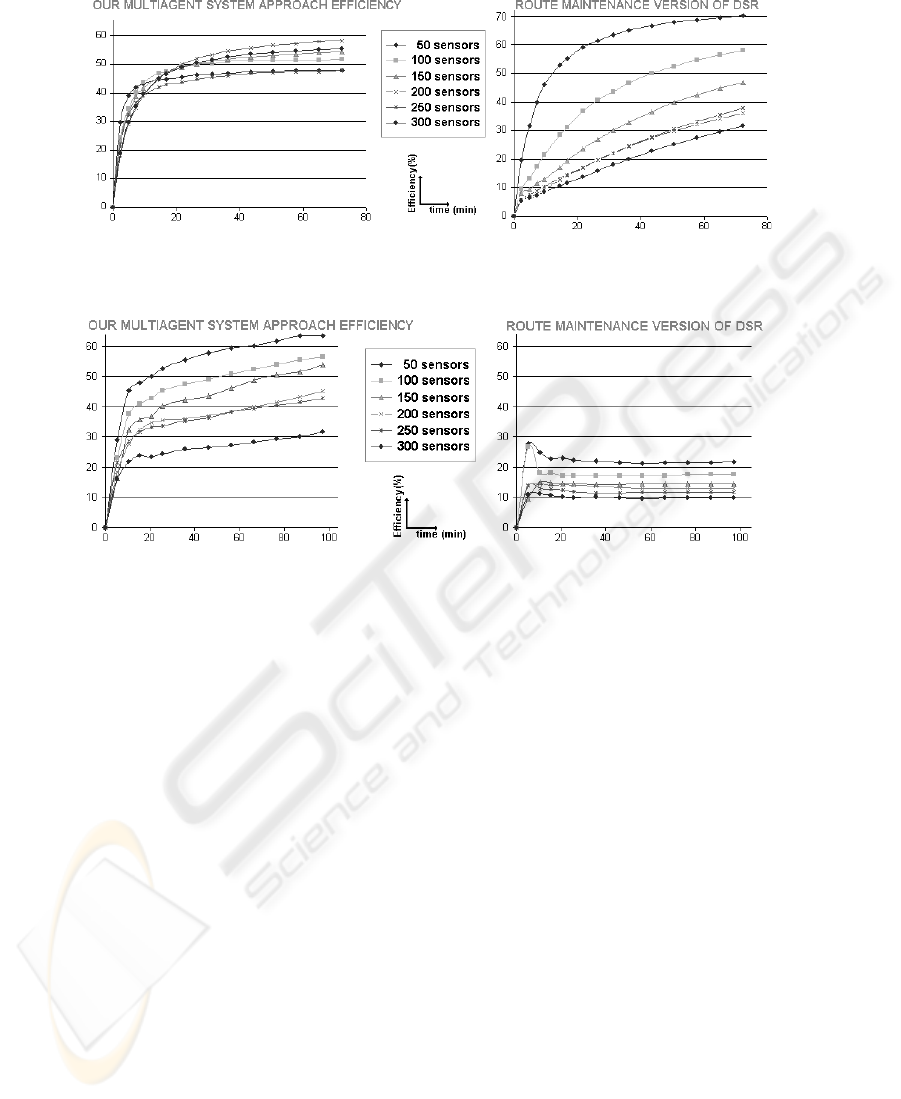
Fig.4. Approach comparison for unidirectionnal use case
Fig.5. Approach comparison for the multidirectionnal use case
much better than DSR because its route management is more complicated. If we add
some perturbations on these scenarios (one perturbation by three minutes) the efficiency
is nearly the same (it is not the case for the DSDV protocol).
5 Conclusion
We have presented in this paper a MAS to manage wireless communication between
agents in respect to energy constraints. From our different works on physical complex
systems, we concluded that more genericity can be introduced in communication man-
agement. We have built a multiagent middleware based on a multiagent approach which
allows to make abstraction of this energy efficient communication management at the
application level. We use this middleware in the case of a wireless sensor network.
In this application, all the agents have a hybrid decisionnal architecture based on the
ASTRO model. The middleware is included in the ASTRO communication module.
Agents present interesting features of software engineering such as genericity allow-
ing an easy evolution of the applications. Generic aspects of agents allow us to envisage
differents applications for this network type such as diagnosis, risk management, data
fusion...
80

References
1. M. Calisti, T. Lozza, and D. Greenwood. An agent-based middleware for adaptative roaming
in wireless networks. In AAMAS 2004 Workshop on Agents for Ubiquitous Computing, 2004.
2. R.S. Gray. Soldiers, agents and wireless networks: A report on a military application. In Pro-
ceedings of the Fifth International Conference and Exhibition on the Practical Application
of Intelligent Agents and Multi-Agents, 2000.
3. J.-P. Jamont and M. Occello. Using self-organization for functionnal integrity maintenance
of wireless sensor networks. In Proceedings of IEEE International Conference on Intelligent
Agent Technology, 2003.
4. D.-B. Johnson and D.-A. Maltz. Dynamic source routing in ad hoc wireless networks. In
Mobile Computing, pages 153–181. Kluwer Academic Publishers, 1996.
5. M. Mamei and F. Zambonelli. Self-organization in multi-agent systems : a middleware ap-
proach. In AAMAS 2003 Workshop on Engineering Self-Organising Systems, pages 233–248,
2003.
6. M. Occello, Y. Demazeau, and C. Baeijs. Designing organized agents for cooperation in a
real time context. In Collective Robotics, volume LNCS/LNAI 1456, pages 25–73. Springer-
Verlag, March 1998.
7. M. Occello and J.L. Koning. Multi-agent based software engineering: an approach based on
model and software reuse. In From Agent Theory to Agent Implementation II - EMCSR 2000
Symposium, pages 645–657, Vienna, April 2000.
8. C.E. Perkins, E.M. Royer, and S. Das. Highly dynamic destination-sequenced distance-
vector (dsdv) routing for mobile computers. In ACM SIGCOMM’94, 1994.
9. Petriu, E.M. et al. Intelligent robotic sensor agents for enviroment monitoring. In Pro-
ceedings of IEEE International Symposium on Virtual and Intelligent Measurement Systems,
pages 19–20, 2002.
10. M.J. Wooldridge, N.R. Jennings, and D. Kinny. The gaia methodology for agent-oriented
analysis and design. In AAMAS, volume 3, pages 285–312. KAP, 2000.
81
