
Genetic Tuner for Image Classification
with Robotic Applications
Shahram Jafari and Ray Jarvis
Intelligent Robotics Research Centre (IRRC)
Monash University, VIC 3800, Australia
Abstract. This paper introduces a genetic tuner implemented for optimizing the
image scene analysis prior to the grasping of the objects, to realize a concrete
working robot named COERSU
1
. Firstly, different architectures of the adaptive
neuro-fuzzy inference system, multi-layer perceptron and K-nearest
neighborhood classifiers are compared to perform scene analysis and object
recognition. Following on, the MLP classifier is chosen due to its accuracy and
flexibility to be tuned by genetic algorithm. The real-time experiments (after
tuning) show that the performance of the genetically tuned MLP classifier is
improved in terms of accuracy due to this hybridization. Finally, snapshots of
the experimental results from COERSU in a table-top scenario to manipulate
some soft objects (e.g. fruit/egg) are provided to validate the methods.
1 Introduction
The context of the present research is a bigger effort to devise a multi-paradigm
model for robotic perception and manipulation. The major core is to integrate
different intelligent concepts to perform robotic eye-to-hand coordination and to
produce a working system, COERSU. How to make the robot decide based upon
information coming from different sensors, how to handle the feedback coming from
the dynamically changing environment and how to speed up the multi-paradigm
model of intelligence, are some of the high level questions that are attempted to be
answered during this research (Figure 1). Enabling COERSU to perceive, recognise
and manipulate soft objects on the table in a similar way to its human counterpart is
the most important part of this project.
The process of visual understanding includes image acquisition, segmentation
into coherent components, the recognition and pose determination of these
components and, potentially, an action plan related to the analysed environment. The
goal of image segmentation is to partition an image into meaningful homogeneous
regions [2, 6, 13]. The present research was based upon the critical assumption of
separating off-line tuning from the speed demanding real-time execution. Before,
during and after the scene analysis, different processes need to be performed, such as:
smoothing, registration, normalization and pseudo-colouring and segmentation.
1
An acronym for the Latin expression, “Cogito ergo sum” which means “I think
therefore I am”.
Jafari S. and Jarvis R. (2005).
Genetic Tuner for Image Classification with Robotic Applications.
In Proceedings of the 1st International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 12-22
DOI: 10.5220/0001195100120022
Copyright
c
SciTePress
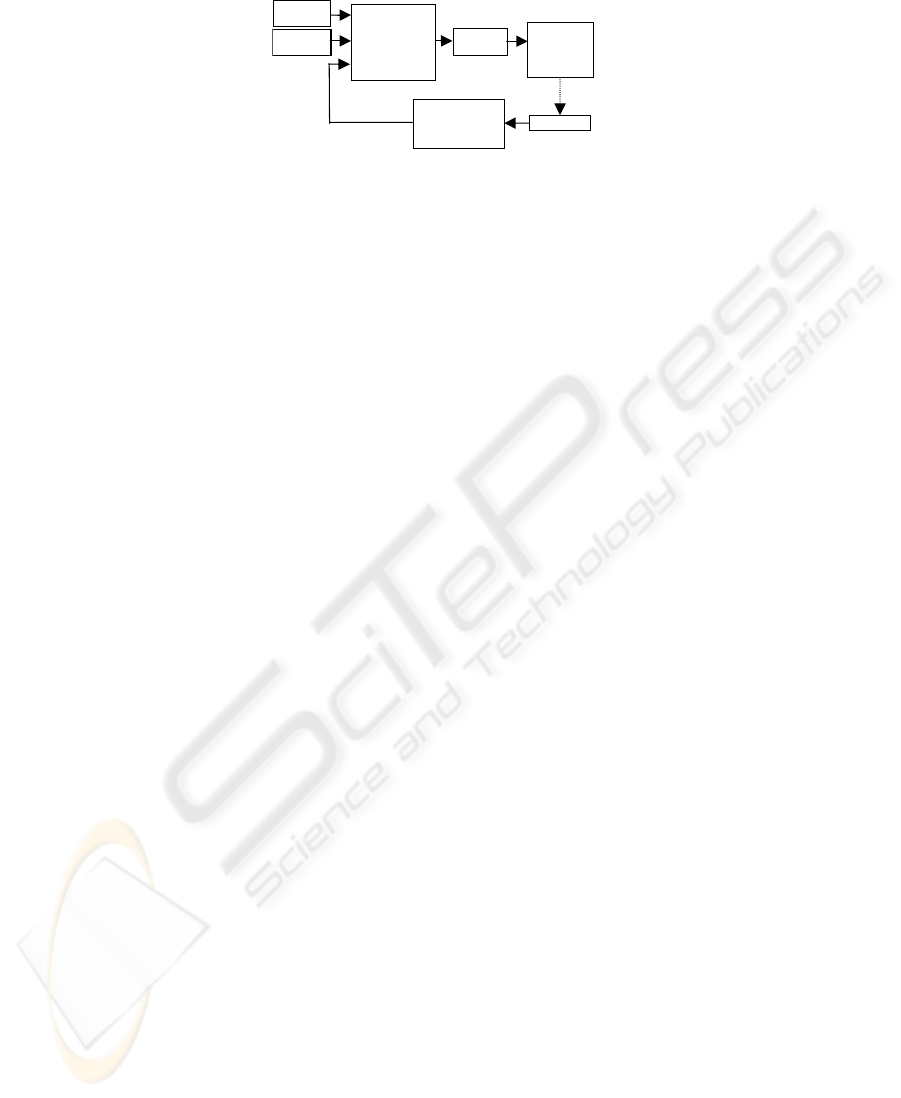
Genetically tuned
Segmentation,
o
b
ject recognitio
n
and Classification
RGB colour
information
Stereo range
information
Perception
and Control
Signals to the
actuator/mani
pulator of
neck and hand
Feedback from
human/environment:
Vision, Tactile,
Arm, Neck, User
Environment
edge detection,
Fig. 1. Block diagram of the working system.
For further details, refer to [9].
In this paper, Section 2 briefly explains scene analysis and compares different
methods for object recognition suitable for COERSU. The genetic tuner to optimize
the classifier is explained in Section 3. Snapshots of the video-clips are also shown at
the end to demonstrate the effectiveness of the methodologies.
2 Scene analysis
The major goal of scene analysis is to be able to determine what and where the
objects are in the scene, and the possible interrelationship between the objects in
order to manipulate them by a robot. There have been numerous studies of object
recognition in a robotic manipulation context. [3] developed an intelligent cruise
control (ICC). Object recognition based on sensor data was part of their intelligent
system and they made great contributions but mainly on car tracking systems, which
were far from our research problems. [4] proposed SENROB which detects and
manipulates objects within the working place of their robot, MANUTEC r2; however,
the camera is mounted in the robot’s hand which is quite different from our platform.
In our scene classification problem, the process was performed after the
segmentation and prior to the manipulation of the target object so that the robot arm
could not influence and disturb the classification of the objects. A five-nearest
neighbourhood classifier [7] was firstly considered because of its simplicity.
However, different neural network based methods were implemented to verify and
compare with the result of K-NN. We trained our system with fifty different known
object-pose cases. These consisted of five samples for each of ten prototype objects.
These objects were some foodstuffs such as, a banana, a cucumber, an egg, a kiwi
fruit, an eggplant, a capsicum and some other kitchen utensil: a mug, a plate, a spoon,
and a knife. Objects were chosen based on their simplicity for manipulation by a
robot hand with two fingers. For each of the objects we considered five different
samples/poses on the table in order to extract enough feature variations.
2.1 Classification features
The best combination of features will produce the greatest difference in the feature
values of significantly different shapes and the least difference for similar shapes.
The features used in our classification methods were chosen based on trial and error
and consisted of seven features for each segment found in the image after the
13
segmentation process: Perimeter, Area, Shape features A and B described below [7]
and Colour components (Red, Green, Blue).
The following two moment invariants are computed to achieve two goals:
primarily to get some shape descriptors, and secondly, to obtain scale, translation, and
rotation invariant features for the objects of interest.
0220
µ
µ
+=A
, (1)
()
2
11
2
0220
4
µµµ
+−=B
,
(2)
Where the central moments
20
µ
,
11
µ
,
02
µ
used above (normalized with respect to
size) are obtained from the ordinary moments:
2/)2(
00
++
=
qp
pq
pq
v
v
µ
, (3)
()()
∑∑
−
=
−
=
−−=
1
0
1
0
),(
M
x
N
y
qp
pq
yxfyyxxv
, (4)
00
10
m
m
x =
,
00
01
m
m
y =
, (5)
∑∑
−
=
−
=
=
1
0
1
0
),(
M
x
N
y
qp
pq
yxfyxm
,
(6)
Where M,N: boundaries of the object rectangle
),( yxf
binary representation of the
object in the segmented image.
In order to have a measure of similarity between an unknown object and the
prototypes for K-NN classification, a weighted Euclidean distance metric was used
(1). Since the Euclidean distance function treats every dimension equally, it was
necessary to normalize the data. By analyzing all of the training data in a pre-
processing stage, we determined the range of every attribute and transformed the
entire dataset appropriately within the range of 0 and 1. Table 1 shows a typical
feature vector based on the image frame, its segmentation and edge detection for an
eggplant in a particular pose. Due to shape similarity between some of the objects
such as, banana, cucumber and eggplant, colour features discriminate better than
shape descriptors A and B, (2),(3).
Table 1. A typical feature vector for one pose of an eggplant.
No. Feature Name Feature values before
normalization
Normalized
feature value
3 Average RED
component
49.242537 0.193108
4 Average GREEN
component
52.514925 0.205941
5 Average BLUE
component
58.029851 0.227568
1 Shape descriptor A 0.326715 0.326715
2 Shape descriptor B 0.264920 0.264920
6 Area 268.000000 0.13958
7 Perimeter 89.000000 0.4635
14

2.2 Comparisons
Two types of each of the classifications were implemented: Two multi-layer
perceptron (MLP), K-NN (with K=1, K=5) and two ANFIS networks [12] were
implemented to compare the classification results. To keep the uniformity condition
and based on trial and error, all of the classifiers were trained with 50 known object-
pose cases, uniformly distributed between the samples, and tested with different 40
samples (4 samples for each of the ten classes of objects).
The first MLP classifier had a 7-5-1 structure where seven features, extracted
from the unknown object, were fed into the network as the inputs, a 5-neuron hidden
layer and one output with (0-9) values representing ten different classes of objects
(0.0 for the first class, 1.0 for the second… and 9.0 for the tenth class). However, in
the second network configuration, 10 different output neurons were considered based
on the idea that for each class of objects, only one output fires on (‘1’) and the other 9
output neurons present ‘0’s. In practice, the ideal (‘0’, ‘1’) outputs cannot be
obtained so we pick the maximum value of the ten outputs and its corresponding class
will be the predicted object. Both MLP’s were trained using error back-propagation
algorithm and a conventional sigmoid activation function was applied [11].
The parameters related to the ANFIS classifier are described as follows (Figure
2): A Takagi-Sugeno-Kang fuzzy rule-based system [15, 10] is equivalent to the
ANFIS network shown in Figure 2. Seven features of the unknown object are fed into
the network as the input layer. The output ranges from 0 to 9 and represents different
classes of the input. (e.g. class 0 represents mug, class 1 represents cucumber and so
on) and thirteen Sugeno type fuzzy rules were generated.
The confusion matrices [1] which contain information about actual and predicted
classifications were prepared for all of the classifiers using test cases.
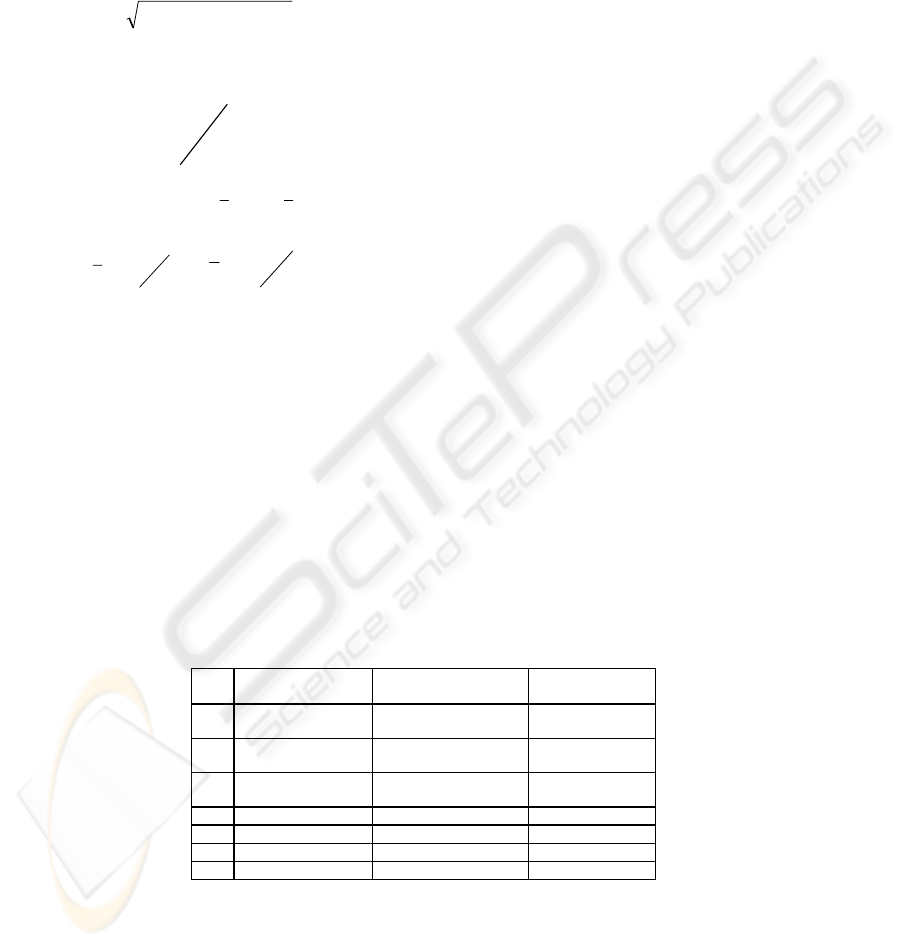
As an example (Table 2), after running the 5-NN algorithm, it classified the
objects in the scene correctly in 95% of the cases (38 samples). The accuracy was
calculated as the proportion of the total number of predictions that were correct. In
5% of the cases (2 samples), the system misclassified the ‘actual’ eggplant as a
‘predicted’ cucumber (Table 2). This is due to the similarity of the shapes of these
prototype objects in some poses and ‘outlier’ samples in the training set, addressed in
Section 3.
The result of the accuracy measurements for different methods, off-line training
time and on-line classification time for the image frames are provided in Table 3. The
on-line execution time is calculated as the time taken to analyze the whole image
frame (640 * 480 pixels). It can be observed in the comparison table (Table 3) that
there is a general trade-off between the execution time and the learning time for
different methods[8]. In other words, K-NN takes more time for real-time execution
but MLP and ANFIS perform faster for an unknown image and take more time for
the off-line training stage.
15
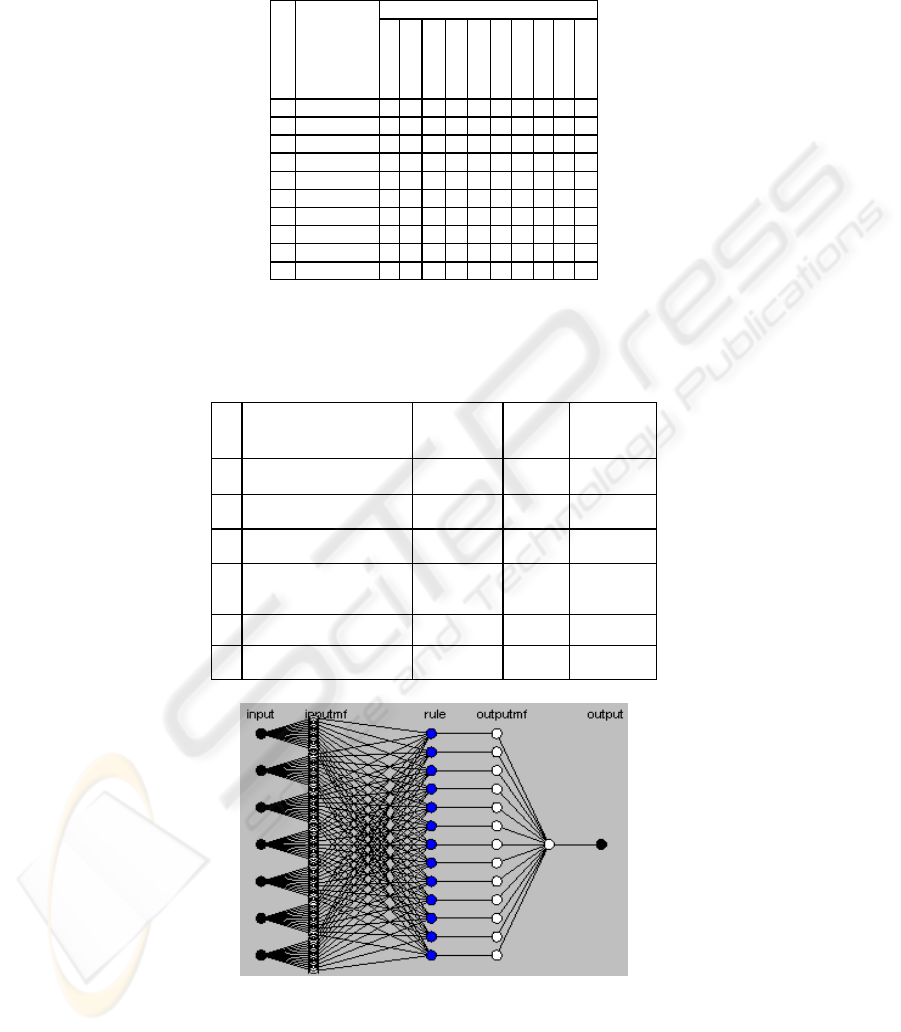
Table 2. Confusion matrix describing the performance of K-NN classifier. Correctly classified:
38 samples out of 40. Overall accuracy: 95%.
True class ( Actual)
No.
Classified as
(predicted)
Banana
Plate
Spoon
Knife
Mug
Cucumber
Eggplant
Egg
Kiwifruit
Capsicum
1 Banana
4
00 00 00000
2 Plate 0
4
0 0 0 0 0 0 0 0
3 Spoon 0 0
4
00 00000
4 Knife 0 0 0
4
0 0 0 0 0 0
5 Mug 0 0 0 0
4
00000
6 Cucumber 0 0 0 0 0
42
000
7 Eggplant 0 0 0 0 0 0
2
000
8 Egg 0 0 0 0 0 0 0
4
00
9 Kiwifruit 0 0 0 0 0 0 0 0
4
0
10 Capsicum 0 0 0 0 0 0 0 0 0
4
The 7-5-10 MLP showed a better performance than 7-5-1 MLP in terms of
classifying the noisy inputs. This can be attributed to the fact that the distribution of
the classification results was across a wider range of output neurons (10 instead of 1).
Table 3. Comparison between different methods
No.
Method
Learning
time (approx.
Sec.)
Accuracy
(%)
Execution
time (approx.
Sec.)
1 Nearest neighbourhood (1-
NN)
0 87.5% 15
2 5-nearest neighbourhood (5-
NN)
0 95% 20
3 Multi-layer perceptron (one
output) 7-5-1 layer structure
13 92.5% 10
4 Multi-layer perceptron (ten
output) 7-5-10 layer
structure
15 95% 12
5
A
NFIS (7 inputs, one output) 5 90% 15
6 Ten ANFIS (7 inputs, one
output)
28 92.5% 25
Fig. 2. ANFIS (7 inputs, 1 output) classifier.
16

3 Genetic tuner for MLP classifier
Since the supervised classifiers are highly dependent to the training sets, an
inaccurate measurement of the features of the training samples could result in a
misclassification. As discussed earlier in Section 2.1, seven essential features were
measured in order to extract the training samples. However, some features were
measured inaccurately and disturbed the classifier by appearing as severe outliers
which were inaccurate.
In contrast, according to Widrow’s rule of thumb [5] and trial and error, the noisy
training samples can help the classifier to have a better generalization [12]. However,
in this case the incorrect outliers were not genuine features of the training objects and
the classifier should not be generalized based on the incorrect information. These
wrong training samples were contributing to the error of the classification, especially
in the real-time mode, and needed to be removed from the training samples. The
consequence is that to get the best possible output from the classifier, it is necessary
to provide the system with significantly large number of non-conflicting training data.
The challenge is to distinguish between the correctly measured outliers among the
training samples (acceptable) and the incorrectly measured ones (not acceptable). The
incorrect training samples may only have one wrong feature value and the rest correct
but that one incorrect feature may drastically contribute to the error. The exhaustive
search for the selection of a suitable subset among the training samples could be quite
time-consuming, for example, using 50 samples will result in 2
50
different subsets.
In the literature, [14] utilized neural networks as outlier detector by suggesting a
rule to identify the “noise related” neurons. He further argues that little effort has
been reported in eliminating outliers prior to the training phase which affects the
results. However, his regression neural network could not be easily applied to the
classifier neural network. Current procedures for outlier detection such as using
Mahalanobis distance suffers from masking effect [14].
A Genetic algorithm was utilized in this paper to detect these incorrect outliers
and produce a subset of training samples that is suitable for the purpose of training
the classifier. Since all of the seven features were essential, the feature selection was
not included in the genetic tuner although it could be potentially performed.
Collaboration between GA and neural networks has been reported in the literature
before. [16] devised genetic neural networks for classification of remotely sensed
images. The architecture of the neural network was designed using GA which makes
it different from our problem.
3.1 Implementation details of the MLP genetic tuner
The aim of this genetic tuner was to optimize the neural network classifier by
selecting a suitable subset of the training samples and removing the dubious values to
train the network. The importance of the tuning is that the final correct subset of the
training samples can be applied to other classification methods as well and it
decreases the computation time of the real-time execution (for K-NN methods) or the
learning time (for neural network based methods) by removing the dubious values.
17

Therefore, the mapping between the samples space and genetic space was generated
by considering the chromosome to have the same number of genes as the training
samples, in this case 50.
The genes were holding a binary value showing whether the corresponding
training sample exists in the subset (“1”) or not (“0”). Therefore the conventional
genetic functions could be applied plus a trivial constraint. The minimum allowable
number of training samples for each object was considered as a threshold so that at
least one training sample exists for each of the object classes.
It was decided, based on trial and error, that the genetic algorithm have a
population size of 20 chromosomes for each generation and a maximum number of
200 generations for evolution at each run to guarantee the optimum solution. The
roulette selection of the parent was considered for the replication and the mutation
probability of 0.1 and cross-over probability of 0.5 were chosen. Elitism in choosing
the offspring generation was considered as well.
3.1.1 Chromosome fitness evaluation
For the MLP genetic tuner, the goal is to evolve the chromosomes to maximize the
following Fitness(i):
()
()
21
2211
)()(
)(
ww
ifwifw
iFitness
+
×+
×
=
(7)
()
)(1
1
)(
1
iMSE
if
+
=
(8)
()
()
NM
oo
iMSE
M
t
N
k
tki
actual
tki
desired
×
−
=
∑∑
==11
2
),,(),,(
)(
(9)
()
)(1
1
)(
2
iMisclass
if
+
=
(10)
∑
=
T
iMisclass set test in the icationsmisclassif)(
(11)
Where i is the chromosome, f
1
is the fitness measured related to the mean squared
error (MSE) between the actual and the desired output in the training data, MSE(i), is
the mean-squared error for chromosome i; T, number of test samples, N, number of
objects, w1and w2, weights assigned to partial fitness f
1
and f
2
, , M, number of
training samples, k, the neuron in the output layer,
),,( tki
desired
o
, the desired output for
neuron k for a particular training sample t, in chromosome i,
),,( tki
actual
o , the actual
output of the classifier, f
2
, the fitness measured related to the misclassification of an
accurate test sample, ‘+1’ avoids divide by zero in the fitness equations.
In order to obtain a balance between two criteria for the fitness measurments, we
decided to utilize such a weighted averaging fitness. The fitness function was a
compromised estimation between the error in misclassification of the test samples and
the mean squared error between the actual output and the ideal one for the training
data.
The test samples were gathered based on unseen objects different from the
18
training samples in terms of both the physical shape and pose of the object on the
table. For each fitness measurement, MLP classifier is trained using the conventional
error-backpropagation algorithm.
3.2 Experimental results
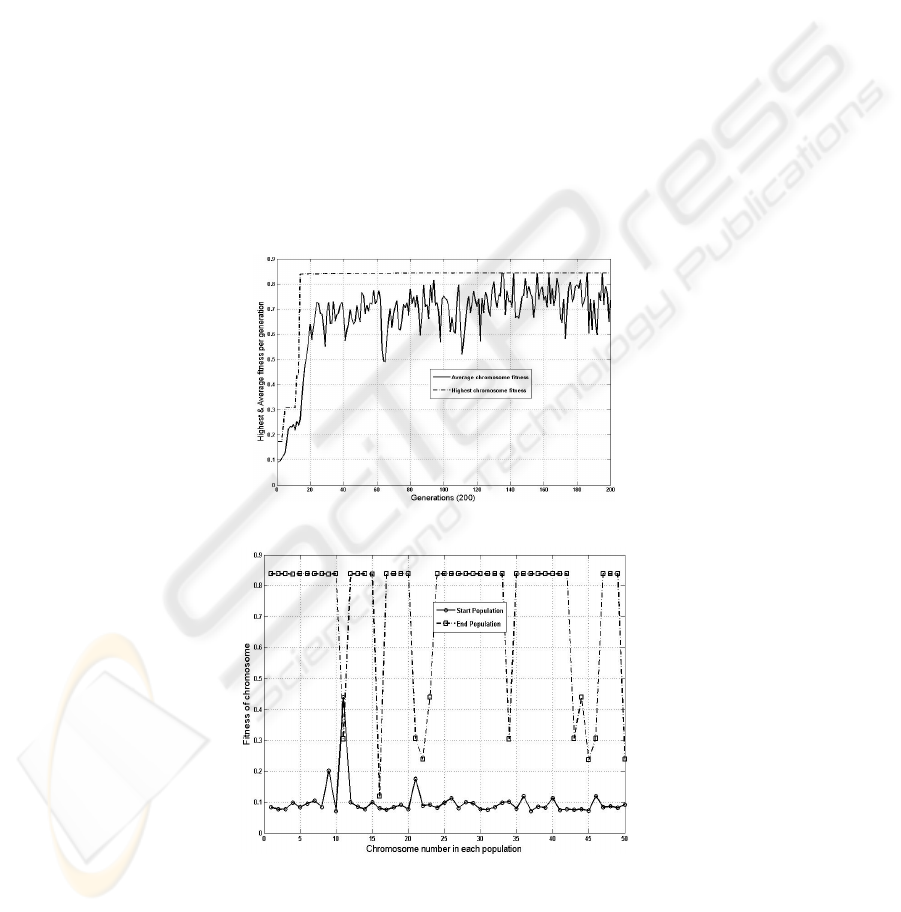
After running the genetic algorithm up to 200 generations a few times, and assuming
the following parameters in the equations (7-11): M=50, N=10, T=40, w
1
= 1, w
2
= 4
(based on trial and error), Figure 3 shows the elite chromosome fitness (highest
fitness) and average fitness for each generation. It can be observed that the average
fitness gradually converges to the maximum fitness found.
Also, fitness of start population versus end population for 200 generations is shown
in Figure 4. It is observed that the end population has much fitter chromosomes than
the start population.
The elapsed time to complete the whole process of tuning the classification with
the above configuration was 3896 Sec. (65 minutes) on an ordinary 1.60 GHZ PC.
This is acceptable, especially because the process was performed off-line prior to the
production mode.
Fig. 3. Highest and average fitness for 200 generations
Fig. 4. Fitness of start and end populations for 200 generations.
19

3.3 Final Configuration of the Real-Time Pattern Classifier (Combination
Strategy)
In order to make a more powerful classifier, compensate the deficiencies of each one
and increase the performance of the whole system in terms of reliability, combination
of different classifiers is preferred.
In practice, the problem with a fixed test set is that the classifier becomes rigid
by tuning itself based on a fixed set of test samples. Therefore, it was decided to take
an odd number of correct test sets (for our case we chose 3 sets) and use each of them
to extract the corresponding suitable training subset and consequent classifier.
Therefore, each of the MLP classifiers was slightly different from the others. During
the production mode, in order to find a compromised solution between the decisions
of the different classifiers, the voting mechanism was implemented so that the class
of object which had the majority of approval was selected as the final result, as
shown in Figure 5. (If three of the classifiers predicted differently, the object would
remain unknown, however, this case did not happen in our experiments).
Finally, Figures 6, 7 show the snapshots of the integration of the processes, from
the on-line observation to the grasping of an egg.
Fig. 5. Result of online scene analysis (from left to right): (a) original image frame (b) result of
edge detection (c) segmentation based on the genetically tuned parameters (d) genetically
tuned object classification.
Fig. 6. An egg is grasped and picked up by COERSU in a table-top scenario.
20

Fig. 7. On-line result in response to the command: ‘Grasp the egg’ (column-wise from left)
a) Frame No.1-initial scene, objects are recognized b) Frame No.2- first positioning of the
tooltip c) Frame No.8- alignment with the centroid of the target d) Frame No.9- 3D x, y
adjustments e) Frame No.10- target verification f) Frame No.11- opening the tooltip g)
Frame No. 12- wrist tilt and grasping the egg h) Frame No. 13- final grasping, tilt back the
wrist i) Frame No. 14- ready for the next command. (row-wise from top) i) original image
ii) result of edge detection iii) tuned segmentation.
4 Conclusions
The result of the scene analysis and classification using different architectures of the
classifiers (Multi-layer Perceptron, ANFIS and K-NN classifiers) were compared. A
genetic tuner for optimizing the multi-layer perceptron classifier was explained to
support image scene analysis for our robotic platform, COERSU. Although using the
21

tuner makes the system more complicated, it is preferable to apply it to obtain higher
degrees of precision and real-time execution.
References
1. Del Frate, F., G. Schiavon, D. Solimini, et al. 2003, "Crop classification using
multiconfiguration C-band SAR data." Geoscience and Remote Sensing, IEEE
Transactions on, vol. 41(7): 1611-1619.
2. Gong, M. and Y. H. Yang 2001, Genetic-Based Multiresolution Color Image
Segmentation. in Vision Interface 2001, Ottawa, Ontario.
3. Handmann, U., I. Leefken, C. Tzomakas, et al. 1999, A flexible architecture for intelligent
cruise control. in Intelligent Transportation Systems, 1999. Proceedings. 1999
IEEE/IEEJ/JSAI International Conference on: 958-963.
4. Hartmann, G., S. Drue, J. Dunker, et al. 1994. The SENROB vision-system and its
philosophy. in Pattern Recognition, 1994. Vol. 2 - Conference B: Computer Vision &
Image Processing., Proceedings of the 12th IAPR International. Conference on. vol. 2:
573-576 vol.2.
5. Haykin, S. 1994, Neural networks: A comprehensive Foundation, Macmillan.
6. Hofman, I. D. 2000, Three dimensional scene analysis using multiple view range data. in
Intelligent Robotics Research Centre (IRRC). Clayton, Monash University, Australia.
7. Hu, M.-K. 1962, "Visual pattern recognition by moment invariants." Information Theory,
IEEE Transactions on, vol. 8(2): 179-187.
8. Jafari, S. and R. A. Jarvis 2003, A Genetic Off-line Tuner for Robotic Humanoid Visual
Perception presented at IEEE International Congress on Evolutionary Computation (CEC-
2003).
9. Jafari, S. and R. A. Jarvis 2005, "Robotic Hand Eye Coordination: From Observation to
Manipulation (invited paper under review, Submission date: March 2005)." International
Journal of Hybrid Intelligent Systems(special issue).
10. Jafari, S., R. A. Jarvis and T. Sivahumaran 2004, Hybrid Intelligent Models for Visual
Servoing presented at IEEE Conference on Cybernetics and Intelligent Systems (CIS),
Singapore.
11. Jafari, S., F. Shabaninia and P. A. Nava 2002, Neural network algorithms for tuning of
fuzzy certainty factor expert systems presented at IEEE/WAC World Automation Congress,
USA.
12. Jang, J.-S. R. 1993, "ANFIS: adaptive-network-based fuzzy inference system." Systems,
Man and Cybernetics, IEEE Transactions on, vol. 23(3): 665-685.
13. Le Moigne, J. 1992, Refining Image Segmentation by Integration of Edge and Region Data
VO - 2, vol. 2.
14. Lopez, C. 1999, Looking inside the ANN "black box": classifying individual neurons as
outlier detectors presented at Neural Networks, 1999. IJCNN '99. International Joint
Conference on.
15. Negnevitsky, M. 2002, Artificial Intelligence: A Guide to Intelligent Systems 1/e. Adison
Wesley: 394.
16. Sasaki, Y., H. de Garis and P. W. Box 2003, Genetic neural networks for image
classification presented at Geoscience and Remote Sensing Symposium, 2003. IGARSS
'03. Proceedings. 2003 IEEE International.
22
