
PERSON FOLLOWING BEHAVIOR GENERATED WITH JDE
SCHEMA HIERARCHY
∗
Roberto Calvo, Jos
´
e M. Ca
˜
nas
Grupo de Rob
´
otica
Universidad Rey Juan Carlos
L
´
ıa Garc
´
ıa-P
´
erez
Escuela Polit
´
ecnica Superior
Universidad Carlos III
Keywords:
Robot behavior, autonomy, person tracking and pursuit.
Abstract:
One useful capability for service robots is person following. Service robots, like other autonomous robots, are
demanded to exhibit a full range of different behaviors. A control architecture is required to integrate them.
This paper describes the design and implementation of the person following behavior within JDE architecture,
as two groups of concurrent schemas. The robot follows a person wearing a coloured shirt, actively searches
for her when lost in the image, and safely avoids obstacles. Successful experiments with a real robot are also
described, that validate JDE for this vision-based real-time behavior.
1 INTRODUCTION
Robots are entering at homes. The Aibo robot from
Sony, sold as a pet, and the Roomba autonomous vac-
uum cleaner from i-Robot are two real samples, both
best sellers. For service robots it is desirable to ex-
hibit a whole set of different behaviors and to unfold
them accordingly to situation and goals. Their control
architectures are responsible of such ability.
Follow person behavior is part of a natural human-
robot interface for service robots. This paper faces
the generation of a such behavior with a hierarchi-
cal control architecture based in schemas. This ap-
plication has been already solved (Kleinehagenbrock
et al., 2002; Fritsch et al., 2004; Schlegel et al.,
1998; Sidenbladh et al., 1999) with real robots. The
added value of this paper is its implemention within
a perception-control architecture, named JDE (Ca
˜
nas
and Matell
´
an, 2002), which is designed to ease the
integration of other behaviors into the same system.
Such vision-based, soft real time behavior poses a
challenge and is a good test for JDE architecture.
Our solution uses shirt color as the person main fea-
ture. It does not perform any face recognition because
when the robot is following a person, it mainly sees
her shoulder. The robot must follow the tracked per-
son while avoiding bumping with her or with other
∗
This work has been funded by Spanish Ministerio de
Ciencia y Tecnolog
´
ıa, under the project DPI2004-07993-
C03-01
obstacles.
Second section of this paper briefly details the de-
sign and implentation of the behavior. Experiments
with a real robot are shown in third section. Finally,
conclusions of the work are presented.
2 PERSON FOLLOWING DESIGN
WITH JDE-SCHEMAS
The behavior is oriented to a robot endowed with
monocular vision over a pantilt unit, which can guide
the camera at will in any orientation. The general de-
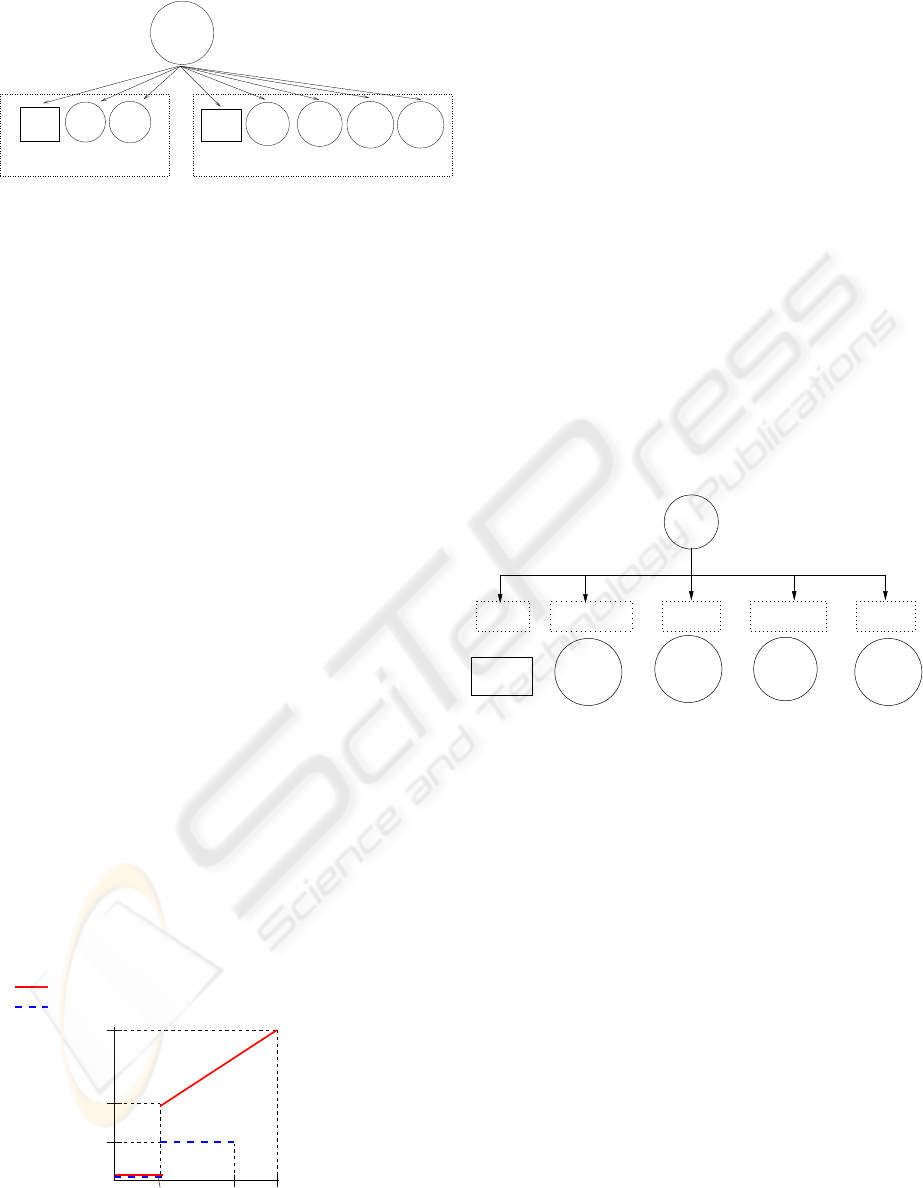
sign of this behavior includes two groups of schemas
that run concurrently, as can be seen in figure 1. The
first group reactively controls the movement of the
pantilt unit that guide the camera to visually follow
the person, keeping her at the center of the image by
means of fast saccadic movements. The second group
reactively controls the robot’s base to align it with the
pantilt unit.
Visual tracking schemas
The visual tracking is performed with three schemas:
color-filter, center and search. The
camera data are processed by the color-filter
schema, which determines the presence and position
of the person in the images. If the target person ap-
463
Calvo R., M. Cañas J. and García-Pérez L. (2005).
PERSON FOLLOWING BEHAVIOR GENERATED WITH JDE SCHEMA HIERARCHY.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 463-466
DOI: 10.5220/0001186104630466
Copyright
c
SciTePress
Obstacles
Avoid−
PANTILT CONTROL BASE CONTROL
color
filter
Search
Forces
Stop
VFF
Tracking
Base
FollowPerson
Center
Figure 1: JDE-schemas for person following behavior
pears inside the frames then the centerschema will
move the pantilt to keep the person centered. If she
does not appear, then the search schema will move
the pantilt around to look for the lost target.
The perceptive schema color-filter detects
the presence of the person in the camera images using
a HSI color filter. It is always in ACTIVE state. Its in-
put are such camera images. As output it builds three
dynamic stimuli which will be used by center and
search in their control decisions, and in the Action
Selection between center and search. First, a
boolean variable (presence) indicates the presence
or absence of the person in the frame. If the number of
pixels complying the color filter exceeds a threshold
then the presence variable is set to true. Second,
the location of such person in the image (position
variable) is computed as the center of masses of all the
pixels complying the color filter. And third, it stores
in the side variable whether the target appears in the
left or right side of the frame.
The center schema is an actuation one which
moves the pantilt in order to keep the target person
close to the center of the camera images. It accepts
position as input, and its output are the pantilt
commands. The preconditions of this schema will
hold whenever the presence variable is true. It fol-
lows the feedback control shown at figure 2, propor-
tional for pan axis, constant in tilt axis, and with a
dead band to avoid jitter. For instance, if the target
appears in the right side of the image, the pantilt will
rotate to the right.
16040
102
77,5
Distance (pixels)
36,5
120
Pan Speed (degrees/seg)
Tilt Speed (degrees/seg)
to image center
Figure 2: Proportional control in center schema
The search schema is an actuation one which
moves the pantilt horizontally to look around, search-
ing for the lost target person. Its output are the pantilt
movement commands and its preconditions will hold
whenever the presence variable is false, so the ro-
bot has lost its target person. This search begins turn-
ing the pantilt towards the last side (side) of the im-
age where the person target was seen. If the person
appeared in the right side before she was lost, the pan
will rotate to the right. When it reaches the maximum
angle, it rotates in the opposite direction.
Base tracking schemas
When moving the robot body both the target per-
son and the obstacles must be taken into ac-
count. The behavior design with JDE-schemas
is displayed in figure 3: Without objects around,
the base-tracking will be activated; Otherwise
stop, avoid-obstacle or vff will be activated
depending on the distance to obstacles.
Forces
near target
Lost or very
obstacle
Near
Stop
Robot
Obstacle to
medium distance
VFF
Avoid
Obstacles
far Obstacle
Tracking
Base
Person
Follow
Figure 3: Schemas for robot base movement
The robot navegation is based on repulsive forces
from the obstacles and attractive forces towards the
target. The forces schema builds and keeps up-
dated such forces, which are the input stimuli for the
actuation schemas. It is always in ACTIVE state. The
obstacles are detected reading the measurements of
sonar sensors. The relative angle between the target
person and the robot’s heading is indirectly measured
in the current position of pan motors.
The stop-robot schema stops the robot when
the target has been lost or it is too close to the robot.
Its output are speed commands to the motors of the
robot base. The presence of the person in the image is
read from the aforementioned presence. To detect
that the target is near, we count the rows in the image
with pixels similar to the color of the target person.
If such count exceeds a given threshold, then the tar-
get person is already very close to the camera. This
tecnique is robust to different person orientations.
When there is an obstacle too close to the robot,
then the avoid-obstacles schema stops the ro-
bot and it rotates until it finds an free space in front.
ICINCO 2005 - ROBOTICS AND AUTOMATION
464

Figure 4: Security region for VFF and
avoid-obstacles schemas
Its input are the sonar readings and its output are the
speed commands to base motors. Its precondition is
the presence of close obstacles, those inside the secu-
rity region in figure 4.
When the closest obstacle around the robot is at
medium distance, then the vff schema will lead the
robot avoiding such obstacle and advancing towards
the target person. This actuation schema use Virtual
Forces Field algorithm (Borenstein and Koren, 1991),
to choose a compromise solution among both trends.
Its precondition is the presence of objects inside the
security region in figure 4, which is wider than that of
avoid-obstacle schema.
When the target person is detected in the images
and there is no obstacle in such direction, then the
base-tracking schema will lead the robot to-
wards the target person. The position of pantilt is the
basic input of this schema, and is read from the pan-
tilt encoders. The angular deviation of pantilt, read
from pantilt encoders, indicates the direction to fol-
low the target. A proportional control is implemented
by this schema, similar to that of center schema,
but with the base motors, which are slower than the
pantilt ones. It also has a dead band, of 20 degrees.
Combination into global behavior
The concurrent execution of the described schemas
provides the pursuit behavior of the robot.
They are grouped together as children of the
follow-person behavior, which encapsulates
the desired functionality in a schema interface. This
schema is the ultimate responsible for the whole
pursuit behavior. In our experiments its activation
comes from the human operator through the graphical
interface of the application.
Following the design in figure 1, it will awake eight
children at the begining, separated in two independent
groups of schemas. All the schemas run concurrently,
some of them in CHECKING state, some on READY
state and one per group in ACTIVE state. There
will be continuous competitions inside each group
to control the pantilt and base motors respectively.
Only one winner is allowed per group. In the visual
tracking group, the search and center schemas
will alternatively win, depending on the presence of
the target person in the image. In the base track-
ing group, hopefully there will be no obstacle around
and the base-tracking schema will be ACTIVE
most of the time. There may be control overlaps, as
the preconditions of vff and avoid-obstacles
schemas may be fulfilled simultaneously. Cautiously,
the last one has priority over vff.
Regarding the perception side of the behavior, the
color filtering and force computations are performed
only when follow-person is ACTIVE. This is a
simple example of an attention mechanism.
3 EXPERIMENTS
The presented hierarchy of schemas for person fol-
lowing has been programmed and tested under differ-
ent conditions on a pioneer robot
2
. The target person
weared a green T-shirt during the tests, and so the tar-
get color was dark green.
Figure 5: Obstacle avoidance while pursuing target
In the experiments the robot successfully followed
the target along our university corridors and halls.
The target person constinuously moved from left
to the right while the robot followed her smoothly.
Along the typical pursuit in the corridors, the ro-
bot properly followed the target, alternating vff and
base-tracking schemas in ACTIVE state. The
target was continuously tracked by the pantilt unit.
The designed avoidance strategy depends on the
obstacle proximity. When possible, robot avoids the
obstacle without stopping, as can be observed in fig-
ure 5 when robot avoids a non-target person on the
corridor. If obstacle is very close, robot stops and
turns. When clearance is achieved robot starts mov-
ing towards the target again. Tracking the target dur-
ing the avoidance maneuver is possible because the
pantilt movement is decoupled from robot base move-
ment.
2
Some videos of the experiments are available at the
web, http://gsyc.escet.urjc.es/jmplaza/research-vision.html
PERSON FOLLOWING BEHAVIOR GENERATED WITH JDE SCHEMA HIERARCHY
465

Figure 6: Target lost, searched and recovered
Due to occlusions that may be caused by corners at
the end of corridors or obstacles, robot can lose the
target. An example of the robustness of target recov-
ering strategies can be seen in figure 6, when the tar-
get person disappeared from the camera images. Then
the visual tracking schemas switched from center
to search, rotating the pantilt unit to the right, look-
ing for the lost green T-shirt. Robot stopped the mo-
tors (stop-robot) and initiated the search with the
pantilt, rotated in the horizontal axis looking in the
last known target position. This searching method
have proved to quickly recover the target.
Figure 7: Robot keeps the distance using only vision
Maintaining a safe distance between robot and tar-
get is a key question in person following as we don’t
want the robot to bump into the human. As can be
seen in figure 7, the designed behavior detects the size
of the person in the image, and brakes the robot when
such size surpasses a safety threshold. There is no
explicit distance measurement. The stop-robot is
then activated, and it continuously checks its precon-
dition. When target moves away from the robot, the
schema hierarchy reconfigures itself, activating the
base-trackingand it starts to pursuing her again.
4 CONCLUSIONS
Person following behavior has been designed and im-
plemented inside JDE as two concurrent groups of
schemas. JDE combines several habilities in a small
hierarchy: target tracking using a color filter, naviga-
tion behavior pursuing the tracked person, avoiding
obstacles and mantaining a safe distance.
The robot exhibits good performance in the ex-
periments: it follows the moving target with smooth
movements avoiding obstacles and mantaining a safe
distance with the tracked person. In addition, when
target is lost the robot is able to recover the tracked
person quickly.
We are working to introduce new behaviors to test
JDE abilities to integrate a larger number of them.
REFERENCES
Borenstein, J. and Koren, Y. (1991). The vector field
histogram fast obstacle avoidance for mobile robots.
IEEE Journal of Robotics and Automation, 7(3):278–
288.
Ca
˜
nas, J. M. and Matell
´
an, V. (2002). Dynamic schema
hierarchies for an autonomous robot. In Francisco
J. Garijo, J. C. R. y. M. T., editor, Advances in Arti-
ficial Intelligence - IBERAMIA 2002, volume 2527 of
Lecture notes in artificial intelligence, pages 903–912.
Springer.
Fritsch, J., Kleinehagenbrock, M., Lang, S., Fink, A., and
Sagerer, G. (2004). Audiovisual person tracking with
mobile robot. In Groen, F., Amato, N., Bonarini, A.,
Yoshida, E., and Krose, B., editors, Proceedings of the
International Conference on Intelligent Autonomous
Systems, pages 898–906, Amsterdam. IOS Press.
Kleinehagenbrock, M., Lang, S., Fritsch, J., Lomker, F.,
Fink, G., and Sagerer, G. (2002). Person tracking
with a mobile robot based on multi-modal anchoring.
In Proceedings of IEEE International Workshop on
Human Interactive Communication (ROMAN), pages
423–429, Berlin (Germany).
Schlegel, C., Illmann, J., Jaberg, H., Schuster, M., and Wrz,
R. (1998). Vision based person tracking with a mo-
bile robot. In Carter, J. N. and Nixon, M. S., edi-
tors, Proceedings of the British Machine Vision Con-
ference, BMVC 1998, pages 418–427, Southampton
(UK). British Machine Vision Association.
Sidenbladh, H., Kragic, D., and Christensen, H. (1999). A
person following behaviour for a mobile robot. In Pro-
ceedings of the 1999 IEEE Int. Conference on Robot-
ics and Automation ICRA’99, pages 670–675, Detroit
(Michigan, USA).
ICINCO 2005 - ROBOTICS AND AUTOMATION
466
