
AUTONOMOUS MOBILE ROBOT ASSISTED HERDING
Pinky Thakkar, Leonard Wesley
Computer Engineering Department, San Jose State University, One Washington Square, San José, California USA, 95192
Keywords: Autonomous mobile robots, Herding, Autonomous human assistance.
Abstract: In this paper, we describe work that begins to address some of the issues related to developing an
autonomous mobile robotic capability to assist humans with herding animals. A novel aspect of this work is
the development of a capability to convey instructions to the robot via movements of a “toy human.” In this
work, no other explicit form of communication from the human to the robot is required. Furthermore, the
robot is able detect if the human is absent or is unable to herd, and to herd the animal autonomously if
required. We developed a herding framework that is based on low stress herding techniques. The robot uses
a pan-tilt-zoom camera and a laser ranging sensor to track the human and interpret the human’s movements.
We conduct two sets of experiments that demonstrate autonomous and co-operative herding behaviour of
the robot. We conclude by presenting experimental results that suggest our approach to developing a service
robot with assistive herding capabilities holds promise for scaling to more complex and sophisticated tasks.
1 INTRODUCTION
Developing autonomous mobile robots that are
capable of assisting humans with complex tasks
within minimally instrumented environments and
with minimal communication remains a challenge.
Having such a capability is potentially beneficial in
a variety of situations ranging from stealthy military
and law enforcement activities through civilian
activities such as herding domesticated livestock.
The focus of the work reported here is two-fold; to
develop an autonomous mobile robot that is able to
perceive and interpret the movements of a human as
a means to communicate instructions and the
human’s intentions to the robot, and to carry out
autonomous herding at the direction of or absence of
the human. An innovation of the work described
here involves developing cattle and human
behaviour models, perception techniques, and using
them along with a specific herding technique, called
low-stress herding (Smith, 1998), to carry out
assistive or autonomous herding activities. Some
researchers have attempted to communicate with
assistive robots by developing speech and gesture
recognition systems, to convey their intentions to the
robot (Fischer et al., 1996, Topp et al., 2004,
Yoshizaki et al., 2001). One differentiating aspect of
our work is that no overt speech or gesture
communication between the human and robot is
used. Rather, just human motion relative to the
animal and robot is used to communicate intentions
and instructions to the robot. Although this work
involves herding a single cattle-type animal, and the
human is modelled by a remotely controlled toy, it
represents an important incremental step toward
developing a scaled up approach that can handle
multiple animals and real humans. While we have
reduced the complexity of a real-world context by
using a “toy human” and colored objects, this
allowed us to focus our investigation more on
approaches, techniques, and methods that an
autonomous robot might employ to interpret human
movements. Such interpretations will be used to
direct the robot’s goals and locative movements to
carry the desired assistive behaviour. Once
significant progress is made on this aspect of our
efforts, then we can focus on removing the
simplifying constraints and simultaneously
improving our “interpretation” capability as we
approach a more real-world context.
2 RELATED WORK
Vaughan et al. demonstrated an automated herding
capability in a simulated as well as real world
context. They employed a potential field technique
to herd a flock of ducks to the desired location. Their
approach used an overhead camera to track the
position of the robot and the entire flock. Butler et
73
Thakkar P. and Wesley L. (2005).
AUTONOMOUS MOBILE ROBOT ASSISTED HERDING.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 73-81
DOI: 10.5220/0001183300730081
Copyright
c
SciTePress

al. attempted to herd animals with the help of a
dynamic virtual fence that moved slowly and
automatically to herd animals to the desired location.
Shultz et al. developed a system that used genetic
algorithms to learn the complex task of shepherding,
in which, one mobile robot attempts to herd another
mobile robot to a desired area. Potter et al.
accomplished herding using computer-based
simulations to demonstrate the advantage of
heterogeneity over homogeneity in control systems.
Lein et al. used computer-based simulations to
compare the various shepherding behaviours, in
which, one or more shepherds control the motion of
a flock.
Considerable research has also been done in the
area of service robots that assist humans by fetching
objects and delivering them to a human. Yoshizaki
and Topp developed speech and gesture recognition
modules that the robot can use to help understand
the intentions of the user. Yoshizaki used Motion
Processor (Numazaki et al, 1998) to detect a hand of
the user, whereas, Topp used vision based gesture
recognition algorithms to track a face and a hand.
Fischer utilized a high-level natural language
processing, augmented with CCD camera and a 3D
environmental model to assist in screen based
monitoring.
Despite the advances of previous work, some
technical gaps remain. Ultimately, truly purposeful
and autonomous robot assisted herding must be
accomplished within un-instrumented environments.
Furthermore, it must be anticipated that herding in
outdoor natural environments will require robots to
carry out tasks in contexts that present varying
degrees of perception and terrain challenges. Dust,
precipitation, and noise can impair perceptions.
Terrain elevation changes and obstacles can
preclude line-of-sight perception and movement
along optimal paths. Being able to carry out assistive
herding tasks when communication is limited or
absent, presents challenges that have not been
completely addressed to date. Indeed, the work
described here does not completely address these
herding challenges. However, it does begin to bridge
some of the technical gaps that remain between
successful previous work and a truly autonomous
assistive herding capability. This is accomplished
by significantly limiting the amount of
“instrumentation” that is required to identify the
animal and human, as well as limiting the
communication between human and robot.
3 HERDING BACKGROUND
Humans have been domesticating animals for many
years. It has brought prosperity to society and has
been one of the cornerstones for human progress,
trade and commerce. One of the most critical aspects
of domesticating animals has been the actual upkeep
of the stock. Herding animals is a very important
part of the domestication process, whether it is for
point-to-point transport of livestock, grazing,
commerce, or predator avoidance.
Traditionally, herding was accomplished by the
brute force approach of inducing fear in the animal,
which can cause significant stress in animals. Stress
causes reduction in weight gain, meat quality, milk
production, reproduction performance and immunity
from diseases. In the work reported here, herding is
accomplished by using the low-stress herding
technique where the flight zone of an animal is used
to control and manoeuvre the animal in the desired
direction. The key here is that the animal is herded
from the boundary of its flight zone, which causes
anxiety, not fear, in the animal. Thus the animal
perceives the human as its protector, and not its
adversary. Additional advantages of low-stress
herding techniques are that they facilitate improved
performance with respect to weight gain, feed
efficiency, reproduction performance and immunity
(Blezinger, Gadzia, 1999 and Grandin 1989).
4 ANIMAL MODEL AND LOW
STRESS HERDING
TECHNIQUES
In this section, we introduce and briefly describe the
animal model and the low-stress herding technique
employed in this effort. A glossary of herding terms
that are used here can be found in the section
entitled “10 Herding Glossary.”
Remote controlled small toy vehicles were used
in place of real livestock and a human. The robot
recognizes the animal (i.e., one of the toy vehicles)
with the help of a very small coloured tag that is
attached to the vehicle. In a real world context, we
anticipate using the actual colours(s), shape, and size
of the livestock. In addition to colour, the animal
model consists of the following properties:
1) Flight distance: The distance from the animal
that will induce anxiety in the animal if the robot or
human is closer than that distance. The robot
determines this value before it actually attempts to
herd the animal.
ICINCO 2005 - ROBOTICS AND AUTOMATION
74
2) Minimum flight distance: The minimum
distance the robot is required to keep, from the
animal.
3) Blind-zone: This is the angle behind the rear
of the animal. The robot takes care to not enter it,
except when it has to turn the animal, in which case,
the robot attempts to enter it.
4) Movements: We define the following three
temporal movements of the animal relative to the
robot:
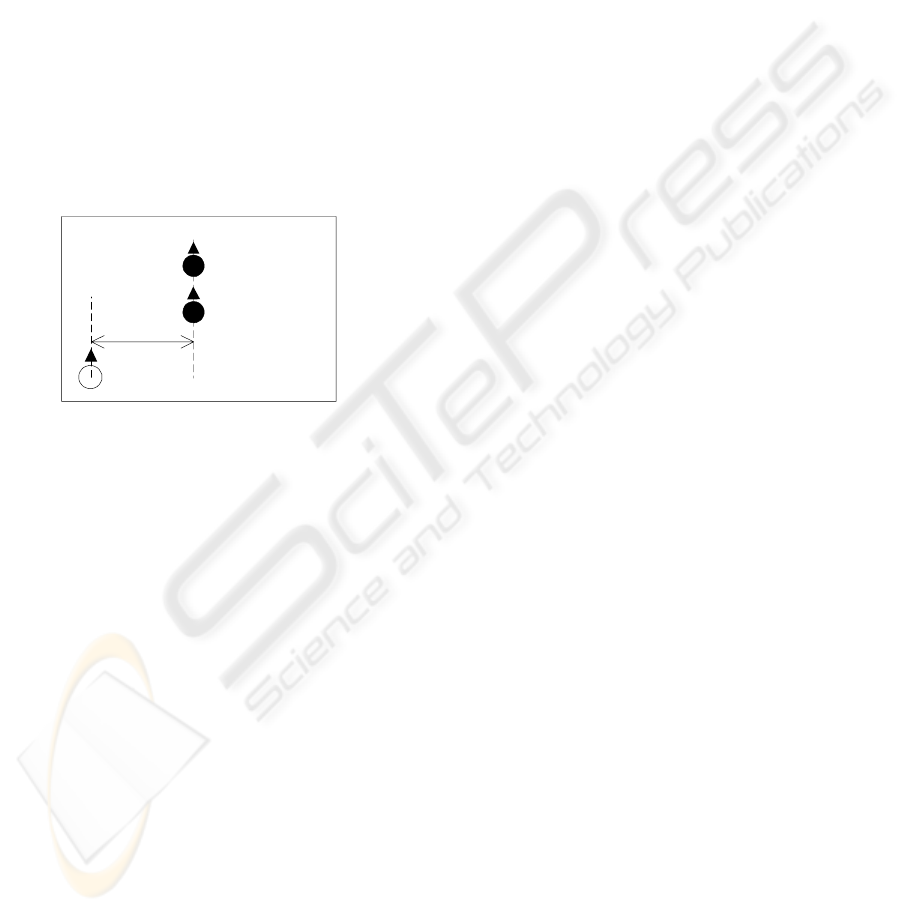
a. Moving Forward: When the distanceY, in
Figure 1, remains within a pre-specified range, the
robot perceives this as a “moving forward” type of
movement.
b. Turning: When the distanceY between the
animal and the robot is outside a pre-specified range,
the robot perceives this as a turning type movement.
c. Stopped: When the animal is neither moving
forward nor turning, then the robot perceives that the
animal has stopped moving.
distanceY
location of animal
at time t1
location of animal
at time t2
Robot
Figure 1: Moving forward
In low-stress herding techniques, the animal is
always herded from the edge of the flight zone.
Hence, the first step toward herding is to determine
the flight zone of the animal. When herding multiple
animals the flight zone is determined by a zigzag
motion. However, when herding an individual
animal, the flight zone is determined by making a
slow diagonal approach toward the rear of the
animal, as shown in Figure 2(a). When the animal
moves forward, the herder has reached the edge of
the flight zone. Other approaches to determining the
flight zone might be equally or more effective, such
as the shoulder approach. However, because of the
geometry of our animal model, we are employing
the diagonal approach.
To herd the animal forward, the herder turns in
the same direction in which the animal is facing,
takes up the outrider’s position and moves along
with the animal (Figure 2(b)). To turn the animal,
the herder employs the tail-head approach, in which,
the herder turns towards the rear of the animal and
slowly moves towards it (Figure 2(c)). When the
herder reaches the blind zone area on the edge of the
flight zone, the animal moves forward with a turned
head to keep the herder in view, this causes the
animal to turn. The herder continues to approach the
animal until the animal has turned the desired
amount.
To stop the animal, the herder stops following
the animal. The animal continues its motion until the
herder is out of the flight zone, at which point, the
animal stops and turns to look at the herder. When it
finds that the herder is not moving in its direction, it
relaxes and engages in some other activity such as
grazing.
5 HUMAN MODEL, DESIGN AND
APPROPACH OF ASSISTIVE
HERDING CAPABILITY
The robot identifies the human with the help of a
colour tag that is attached to one of the toy vehicles.
In addition to the colour tag, the human model
consists of a specification of the temporal human
movements relative to the animal and the robot.
1) Moving towards the animal: As illustrated in
Figure 3(a), when the distanceY between the robot
and the human reduces over time, and angle1 and
angle2 are approximately equal, the robot perceives
this movement of the human as moving towards the
animal.
2) Moving away from the animal: As illustrated
in Figure 3(b), when the distanceY between the
robot and the human increases over time, then the
robot perceives this human movement as moving
away from the animal.
3) Stopped: When the human is at an angle equal
to or greater than |85| degrees relative to the robot,
the robot perceives this as the stopped movement.
The robot and the human are always on either
side of the animal. When the robot perceives the
human moving towards the animal, it interprets this
as a command to initiate herding. Once herding
initiation is successful (i.e., the animal starts to
move), the robot begins to herd the animal in the
forward direction.
To turn the animal, the human either moves
toward or away from the animal depending on the
direction in which the animal is to be turned. If the
human wants to turn the animal, then the human
moves towards the animal, or if the human wants the
robot to turn the animal, it will move away from the
animal to let the robot turn it. Hence, if the robot
perceives that the human is moving towards the
animal, then it interprets this as a command for it to
move out of the flight zone so that the human can
turn the animal. However, if the robot perceives that
the human is moving away from the animal, then it
interprets this as a command for it to turn the animal.
AUTONOMOUS MOBILE ROBOT ASSISTED HERDING
75
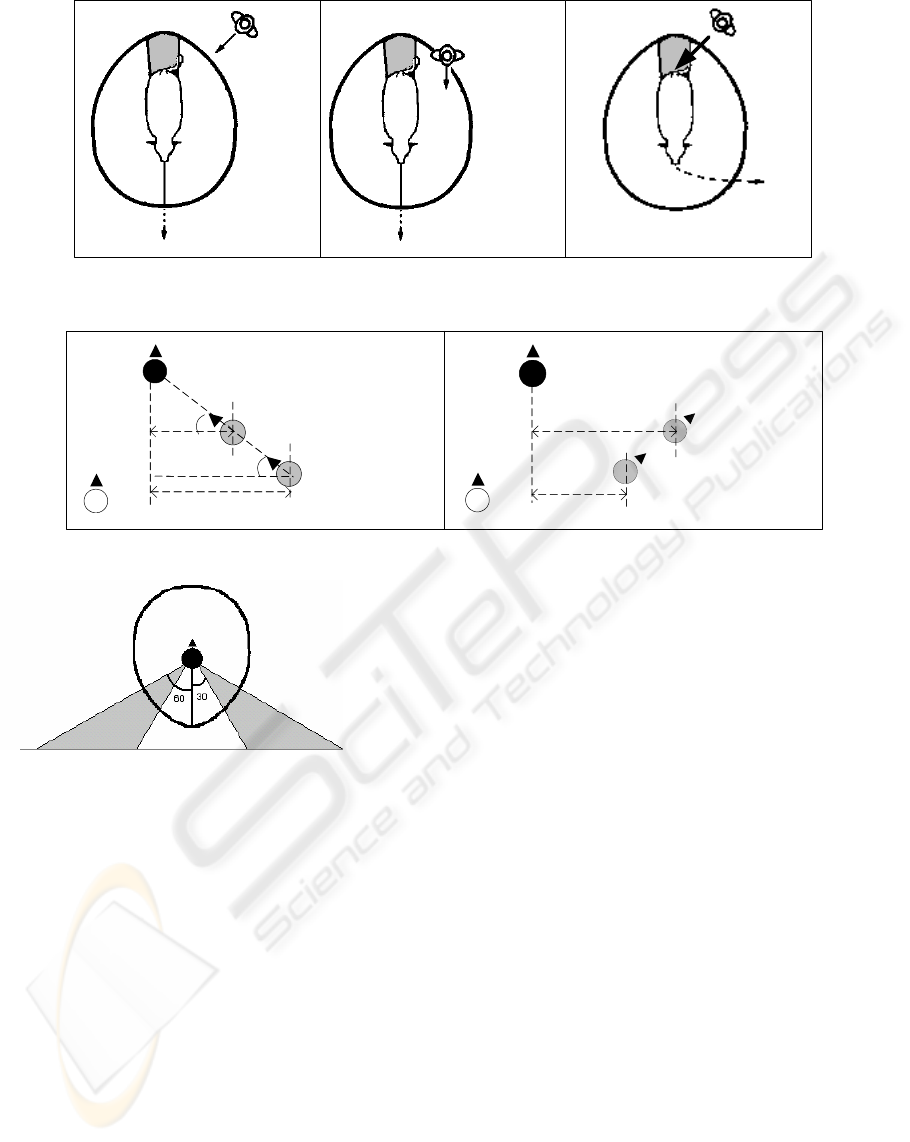
direction of
herder's
approach
direction in which the
animal will move
herder takes up
the outrider's
position
Figure 2: Low stress-herding techniques: (a) Initial Motion, (b) Herding forward, (c) Tuning the animal (Illustrations are
slight modified from (Smith, 1998)
angle1
location of human
at time t1
location of human
at time t2
Animal
Robot
distanceY
location of human
at time t1
location of human
at time t2
distanceY
distanceY
angle2
Figure 3: Human movements (a) Human is moving towards the animal (b) Human is moving away from the animal
Figure 4: Initial herding position
When the robot perceives that the human has
stopped moving then it interprets this as a command
for it to stop herding.
6 IMPLEMENTING THE LOW
STRESS HERDING
TECHNIQUES
Our approach to implementing low stress herding
techniques involves developing separate modules for
initiating herding, moving the animal forward,
turning the animal, and stopping the animal. We
briefly discuss each of these in this section.
6.1 Initiate Herding
This module is broken into the following two sub-
modules:
6.1.1 Initial Position
In this subroutine, the robot attempts to position
itself diagonally, between |30| and |60| degrees, to
the rear of the animal, as shown by the shaded
region in Figure 4.
The robot scans the environment to locate the
animal. With the help of a laser ranging sensor, it
measures the angle between the direction to the
animal and the current heading of the robot. If the
angle is outside the range of |30| and |60| degrees,
then the robot attempts to turn and move to the
initial position as follows:
If the animal is at an angle between 0 and –30
degrees, then the robot turns -90 degrees and moves
backwards until the animal is at an angle 45 degrees
left or right of the robot’s forward facing direction.
For example, if the animal is at an angle –25
degrees, as shown in Figure 5(a), then the robot
turns –90 degrees and moves backwards, Figure
5(b), until the animal is at an angle 45 degrees, as
shown in Figure 5(c). Similarly, if the animal is at an
angle between 0 and 30 degrees, then the robot turns
90 degrees and moves backwards until the animal is
at an angle –45 degrees.
If the animal is at an angle less than -60, then the
robot turns -90 degrees and moves forward until the
animal is at angle of 45 degrees. For example, if the
animal is at an angle of –70 degrees as shown in
Figure 6(a), then the robot turns – 90 degrees and
ICINCO 2005 - ROBOTICS AND AUTOMATION
76
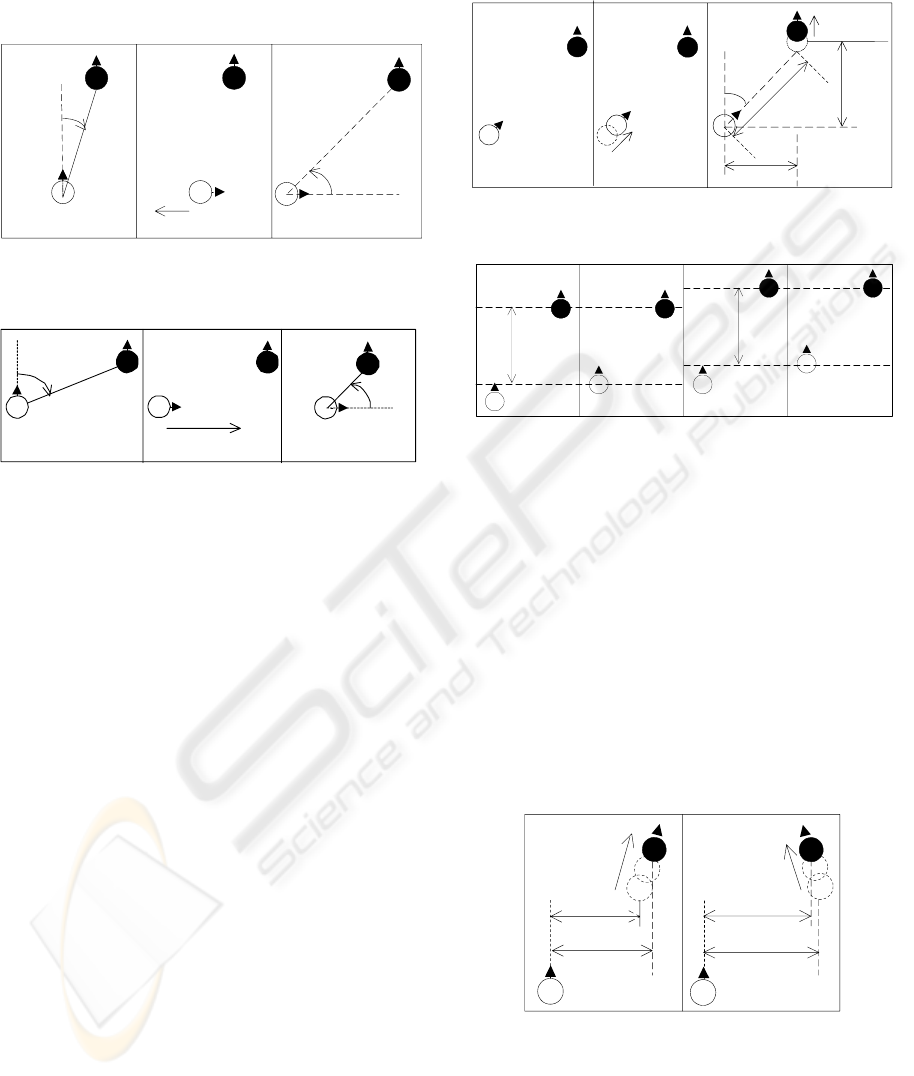
moves forward, Figure 6(b), until the animal is at
angle 45 degrees, as shown in Figure 6(c). Similarly,
if the animal is at an angle greater than 60 degrees,
then the robot turns 90 degrees and moves forward
until the animal is at angle –45 degrees.
-25
direction of motion
45
Robot
Animal
(a) (b) (c)
Figure 5: Moving to initial position when the animal is at
–25 degrees
-70
45
direction of motio n
(a) (b)
(c)
Robot
Animal
Figure 6: Moving to initial position when the animal is at
–70 degrees
6.1.2 Initiating Movement
The robot turns in the direction of the animal, Figure
7(a), and slowly approaches it, until the animal
moves forward, as shown in Figure 7(b). The dotted
circles in this figure indicate the forward motion of
the robot toward the animal. The robot notes the
flight distance and the flight angle, and calculates
the flightX and flightY distances as shown in Figure
7. The dotted circle shows the location of the animal
before it moved forward. The distance flightX is
used to keep the robot on the edge of the flight zone.
The distance flightY is used in the Herding forward
routine to herd the animal in the forward direction.
6.2 Herding Forward
To move the animal forward after arriving at the
initial herding position, the robot turns in the
direction that the animal is facing, takes up the
outrider’s position, and slowly moves along with the
animal, as illustrated in Figure 8. As seen in Figure
8(a), the robot is outside the flight zone and so it
moves forward and reaches the edge of the flight
zone, as shown in Figure 8(b). As a result the animal
moves forward, leaving the robot outside the area of
the flight zone, as shown in Figure 8(c). Hence, the
robot moves forward to reach the edge of the flight
zone, as shown in Figure 8(d). This process is
repeated until the animal has moved the desired
distance.
direction
of motion
flightX
flightY
flight
distance
flight
angle
direction of
motion
Robot
Animal
(a) (b) (c)
Figure 7: Initiating movement
(a) (b) (c) (d)
flightX
flightX
Figure 8: Herding forward
Since the size of the flight zone is dynamic, it may
change in size during the herding process. Flight
zones that become larger do not present a problem,
as the animal will move forward before the robot has
reached the edge of the flight zone. If the flight zone
becomes smaller, then the animal will not move
forward when the robot reaches the edge of what it
perceives or recalls as the flight zone. In this case,
the robot moves forward for a pre-specified distance.
If the animal resumes its forward motion then the
robot updates its flight zone (flightX) value, but if
the animal still does not move, then the robot
invokes the Initial Motion routine to recalculate the
distances, and subsequently invokes the Herding
forward routine.
direction
of motion
direction
of motion
flightY
flightY
distanceY
distanceY
Figure 9: Animal moving at an angle
Complicating this task is the requirement that the
robot recognize when the animal might not be
heading in the desired direction, but may be moving
at some angle relative to the desired direction, as
shown in Figure 9. The robot recognizes this
AUTONOMOUS MOBILE ROBOT ASSISTED HERDING
77
behaviour by comparing the difference between
distance Y and flight Y with a pre-specified value.
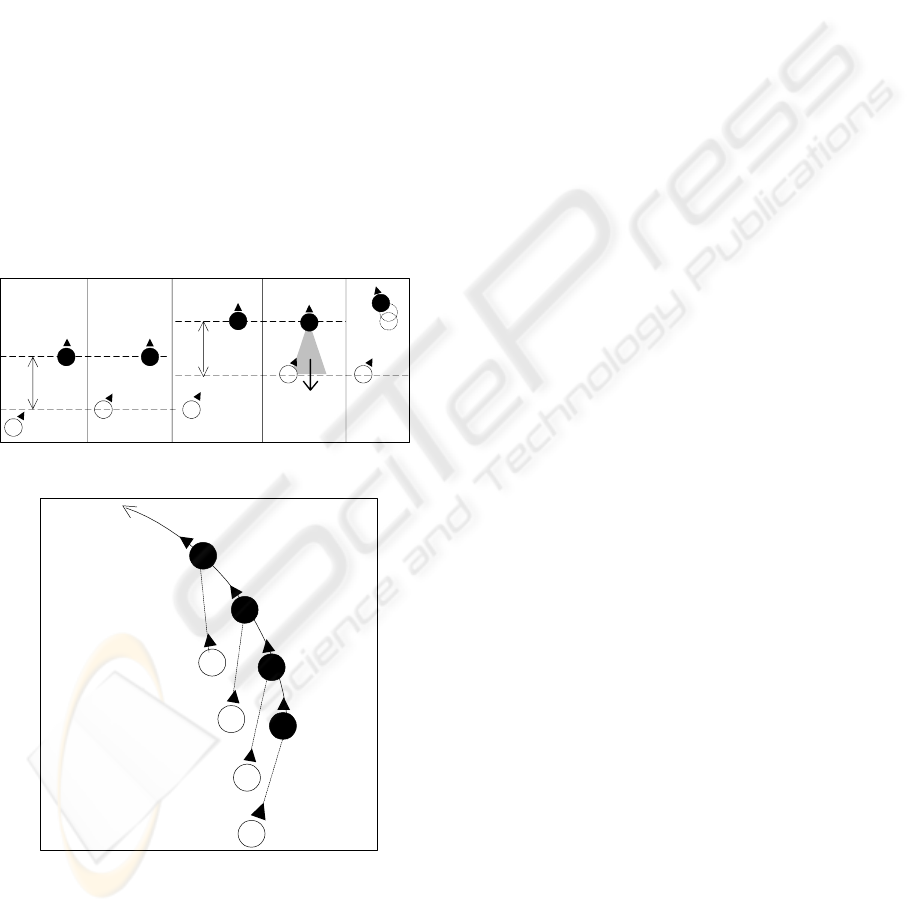
6.3 Turning the Animal
To turn an animal, the robot turns and moves
towards the rear of the animal until the animal is
oriented in the desired direction, as illustrated in
Figure 10. As sees in Figure 10(a), the robot is
facing the animal and is outside the flight zone. The
robot moves forward until it reaches the edge of the
flight zone, as shown in Figure 10(b). Hence, the
animal moves forward, and as a result, the angle
made by the animal decreases, as seen in Figure
10(c). The robot continues moving in the direction
of the animal and at some point in time, reaches the
blind zone of the animal, as shown in Figure 10(d).
To keep the robot in view, the animal moves
forward with a turned head, as a result the animal
turns, as shown in Figure 10(e). The robot continues
to move toward the animal until the animal has made
the desired turn, as shown in Figure 11.
Blind-zone
of the
animal
flightX
flightX
(a) (b) (c) (d) (e)
Figure 10: Steps to execute the turn routine
direction of motion
of the animal
Animal at
time t1
Animal at
time t2
Animal at
time t3
Animal at
time t4
Robot at time t1
Robot at time t2
Robot at time t3
Robot at time t4
Figure 11: Turning the animal
6.4 Stopping the Animal
To stop the animal from moving, the robot removes
itself from the flight zone of the animal.
7 IMPLEMENTING THE
ASSISTING CAPABILITY
Our approach to implementing the assisting
capability involves developing a module for
perceiving human movements. Based on the value
returned by the module, an appropriate herding
module is invoked. Before the robot begins tracking
the human, it executes the Initial Position routine to
move to the initial herding position. Then, it scans
the environment to locate and track the human.
1) Initiate Herding and Herding Forward: When
the robot finds the human moving towards the
animal, as shown in Figure 12(a), it stops tracking
the human and executes the Initiate Motion routine,
followed by the Herding Forward routine. It resumes
tracking the human while herding the animal
forward.
2) Turning the Animal: If the robot perceives that
the human is moving towards the animal, it stops its
motion to let the human turn the animal, as shown in
Figure 12(b). However, if the robot finds the human
moving away from the animal, then it perceives this
as the human asking the robot to turn the animal, and
so the robot executes the “Turning the animal”
routine as shown in Figure 12(c).
3) Stopping the Animal: To stop the animal, the
human stops its motion. When the human makes an
angle greater than |85| degrees relative to the animal,
the robot perceives this as the human wanting to stop
the animal, and so robot executes the “Stopping the
animal” routine.
8 EXPERIMENTS
8.1 Robot Hardware
The robot used in this work was a Pioneer2 AT
robot from Activmedia Robotics. In addition, two
remote controlled toy cars were used to represent the
animal and human respectively. The robot has a pan-
tilt-zoom (PTZ) camera, laser range finder (mounted
in front of the robot), and 8 rear bumper sensors.
The PTZ camera is used to capture images that
are processed in order to recognize the animal and
the human. It can pan up to 180 degrees (-90 to 90
degrees) from the forward direction of the robot.
ICINCO 2005 - ROBOTICS AND AUTOMATION
78

(a) Initiate herding (b) Turning the animal
(Human is attempting turning the
animal )
(c) Turning the animal
(Robot is attempting to turn the
animal)
(d) Stopping the animal
Human at time t1
Human at time t2
direction
of motion
direction
of motion
direction
of motion
angle > |85|
Figure 12: Assisting behaviour
Figure 13: Initiate herding
The laser range finder is used to help determine the
angle and distance between the robot and the animal,
and between the robot and the human. It is also used
for object tracking. The laser can scan up to 180
degrees in the forward facing direction (-90 to 90
degrees). The bumper sensors are used to prevent
damage to the robot by halting the robot when
pressed. They are additionally used to command the
robot turn the animal in some situations.
The toy cars can be moved forward, in reverse,
turned left or right, and stopped by a joy-stick that is
located on a remote control box. A pink-coloured
stick is mounted on top of one car to identify the
animal. Similarly, an orange-coloured stick is
mounted on top of the other car to identify the
human. Thus, the approach developed here assumes
that the animal being herded can be discerned from
the human by colour. In the future, colours will be
replaced by shape, size, and texture recognition and
tracking capabilities.
Two sets of experiments were conducted to
demonstrate the autonomous and assistive herding
capabilities of the robot. One experiment
demonstrates the robot’s autonomous herding
capabilities, that is, without a human. The second
experiment demonstrates the robot’s ability to assist
a human with herding.
8.2 Autonomous Herding Behaviour
In these experiments, the robot is initially placed at
various locations behind the animal at a distance
greater than the flight distance of the animal.
Experiment 1:
The robot is placed in such a way
that the angle it makes to the rear of the animal is
approximately -20 degrees. The task for the robot is
to herd the animal forward. When the robot is
herding the animal forward, the flight zone of the
animal is reduced. When this happens, the task for
the robot is to re-determine the flight zone and begin
herding the animal forward. The robot is asked to
turn the animal by pressing one of its bumpers, (in a
real-world context, a map of the terrain would be
available for the robot to determine when to turn an
animal toward the goal location). Hence, the task for
the robot is to turn the animal 90 degrees. Once
turned, the robot resumes herding the animal in the
forward direction.
Result:
The robot scans the environment to
locate the animal. Once located, it attempts to move
to the initial herding position by turning –90 degrees
and moving backwards until the animal is at an
angle of 45 degrees with respect to the robot, as
shown in Figure 13. The robot scans the
environment to locate the human. When it cannot
locate the human, it turns to face the animal and
slowly moves forward until the animal begins to
move forward. The robot then turns in the direction
in which the animal is facing and starts following it
from the outrider’s position.
In practice, environmental conditions such as the
size and orientation of shadows, lighting, and other
factors can dynamically change an animal’s
effective flight zone. At times, the robot can
unexpectedly find itself outside or inside a flight
zone due to these and other situational dynamics. It
is, therefore, possible that if the animal stops while
AUTONOMOUS MOBILE ROBOT ASSISTED HERDING
79

being herded, it might be because the flight zone has
been reduced in size. Perceiving this, the robot then
approaches the animal until the animal starts moving
forward again.
After the robot has herded the animal forward for
sometime, one of the bumpers of the robot is pressed
to indicate that the animal should be turned. The
robot then turns and moves towards the animal, as
shown in Figure 14. When the animal has turned by
an approximately -90 degrees, the robot turns –90
degrees and begins herding the animal in the
forward direction.
Figure 14: Turning the animal
8.3 Assisting Herding Behaviour
In these experiments, the assistive herding behaviour
of the robot is tested where the robot herds the
animal as per the intentions of the human.
Experiment 2:
The robot has to assist the human
in herding the animal. The robot is placed in such a
way that the angle it makes to the rear of the animals
is approximately, 20 degrees.
Result:
The robot scans the environment to
locate the animal. When the animal is located, the
robot turns 90 degrees and moves backwards until
the animal is at –45 degrees with respect to the
robot.
The robot scans the environment to locate the
human. When the human is located, it waits for the
human to move in the direction of the robot. As soon
as the human moves toward the animal, the robot
begins to move toward the animal. From hereafter,
the robot takes the same actions that it took in
Experiment 1.
The robot starts tracking the human along with
the animal. After herding for awhile, the human
stops its motion. The robot continues to herd the
animal forward until the human is at an angle 85
degrees with respect to the robot. The robot then
stops moving to stop herding the animal.
Experiment 3:
The robot has to assist the human
in herding the animal as before. However, in this
case, the herder moves away from the animal to let
the robot turn the animal. The robot is placed in such
a way that the angle it makes to the rear of the
animal is approximately -50 degrees.
Result:
The robot is already at the initial
position, and therefore it scans the environment to
locate and track the human. As soon as the human
moves toward the animal, the robot begins to move
towards the animal. From hereafter, the robot takes
the same actions that it took in Experiment 2 and
begins herding the animal forward.
After herding forward for a while, the human
turns and moves at an angle of –45 degrees w.r.t the
robot. Seeing this, the robot invokes the turn routine
as it did in Experiment 1.
Experiment 4:
The robot has to assist the human
in herding the animal as before. However, in this
case, the herder performs the turning operation. The
robot is placed in such a way that the angle it makes
to the rear of the animals is approximately 40
degrees.
Result:
Since the robot is already at the initial
position, it takes the same actions as described in
Experiment 3 until the robot begins to herd the
animal forward. After herding the animal forward
for a while, the human turns and moves towards the
animal in order to turn it. Seeing this, the robot stops
its motion to allow the animal to turn.
9 CONCLUSION
We described a robotic system that is able to assist a
human with herding an animal. We showed that the
system is able to adjust its herding behaviour as per
the intentions of the human that are conveyed to the
robot by the movements of the human. A key factor
here is that the assistive herding task is carried out
with minimal communication and within minimal
instrumented environments. We also demonstrated
the autonomous herding capability of the robot, in
situations where the human is absent.
We recognize that there remain complex
challenges to herding real animals that we have not
addressed now because, in part, we are using toy
human and cattle models. However, this paper
represents an initial step towards developing a
purposeful assisted herding behaviour by designing
and developing key representations of the animal
and the human behaviour, and also the key herding
strategies and techniques that will be useful and
expanded in follow-on work that will involve live
animals.
Our work described here is limited to herding a
single cattle-type animal. In future work, we plan to
develop methods for scaling our approach to handle
multiple animals. The other limitation of our work is
the use of colour tags to recognize the animal and
the human. As part of our future study, we intend to
develop more advanced object recognition
ICINCO 2005 - ROBOTICS AND AUTOMATION
80

algorithms that take into account several other
attributes such as shape, size and so forth.
10 HERDING GLOSSARY
Herding: Controlling and maneuvering the animal
in the desired direction.
Flight Zone:
Also known as the flight distance, is
the area around the animal which when intruded,
causes anxiety in the animal and the responds by
moving away. However, if this area is deeply
penetrated, then the animal panics and flees. Its size
is dynamic and changes depending on several
factors, such as, the behaviour of the herder, weather
conditions, state of excitement of the animal, and so
forth. The animal’s flight zone plays a key-role in
low-stress herding techniques. (Smith, 1998,
Grandin, 1989).
Animal Vision:
Cattle have wide-angle vision and
can see behind themselves without turning their
heads. However, they have a small blind spot of
about 15-30 degrees behind their rears. The handler
avoids staying in the blind-spot area for too long as
it can lead to panic in the animal.
Outrider Position:
The outrider position is “the
position the herder takes on or adjacent to the
boundary of the flight zone.
ACKNOWLEDGEMENTS
Thanks to Dr. Burt Smith, Dr. Haluk Ozemek and
Dr. Winncy Du for their helpful suggestions on this
paper.
REFERENCES
Blezinger, S., Producers can reduce stress to cattle by
improving handling methods.
http://www.cattletoday.com
Butler, Z., Corke, P., Peterson, R., Rus, D., 2004. Virtual
fences for controlling cows. In IEEE International
Conference of Robotics and Automation, volume 5,
pages 4429 - 4436, May 2004.
Fischer, C., Buss, M., Schmidt, G., 1996. Human robot
interface for intelligent service robot assistance. In 5th
IEEE International Workshop on Robot and Human
Communication, pages 177 – 182, 11-14 Nov 1996.
Gadzia, K. 1999. Back to the Future: The Environmental
Benefits of Herding. In The Quivira Coalition, vol. 2,
no. 3, March 1999.
Grandin, T. 1989. Behavioural Principles of Livestock
Handling. In American Registry of Professional
Animal Scientists, pages 1–11, Dec. 1989.
Lien, J-M., Bayazit, O.B., Sowell, R.T., Rodriguez, S.
Amato, N.M., 2004. Shepherding Behaviours. In IEEE
International Conference Robotics Automation,
volume 4 pages 4159 – 4164, April 2004.
Lien, J-M, Rodriguez, S., Malric, J-P, Amato, N., 2004.
Shepherding Behaviours with Multiple Shepherds. In
Technical Report TR04-003, Parasol Lab, Dept. of
Computer Science, Texas A&M University. Sept.
2004.
Numazaki, S., Morshita, A., Umeki, N., Ishikawa, M.,
Doi, M., 1998. A kinetic and 3D image input device.
In CHI 98, conference on Human factors in computing
systems, pages 237 – 238, April 1998.
Potter, M. A., Meeden, L., Schultz, A.C., 2001.
Heterogeneity in the Coevolved Behaviours of Mobile
Robots: The Emergence of Specialists. In Proceedings
of the 7th International Conference on Artificial
Intelligence, pages 1337 – 1343, 2001
Schultz, A. C., Grefenstette, J.J., Adams, W., 1996. Robot-
shepherd: Learning complex behaviours. In
Proceedings of the International Symposium on
Robotics and Automation, ASME Press, pages 763 –
768, May 1996
Smith, B., 1998 Moving ‘Em: A guide to Low stress
animal handling, Graziers Hui. Hawaii,1
st
edition.
Topp, E.A., Kragic, D., Jensfelt, P., Christensen, H.I.,
2004. An interactive interface for service robots. In
ICRA '04, IEEE International Conference on Robotics
and Automation, volume 4, pages 3469 – 3474, April
26-May 1 2004
Yoshizaki, M., Kuno, Y., Nakamura, A., 2001. Human-
Robot Interface based on the Mutual Assistance
between Speech and Vision. In Proceedings of the
2001 workshop on Perceptive user interfaces, ACM
International Conference Proceeding Series, pages 1 –
4, November 2001.
Vaughan, R. T., Sumpter, N., Henderson, J., Frost, A.,
Cameron, S., 2000. Experiments in automatic flock
control. In Robot and Autonomous Systems, pages
109 – 117. 2000.
ActivMedia Robotics, http://robots.activmedia.com
AUTONOMOUS MOBILE ROBOT ASSISTED HERDING
81
