
MULTILAYER PERCEPTRON FUNCTIONAL ADAPTIVE
CONTROL FOR TRAJECTORY TRACKING OF WHEELED
MOBILE ROBOTS
Marvin K. Bugeja† and Simon G. Fabri‡
Department of Electrical Power and Control Engineering, University of Malta
Msida MSD06, Malta
Keywords:
Wheeled mobile robots, trajectory tracking, adaptive control, neural networks, stochastic estimation.
Abstract:
Sigmoidal multilayer perceptron neural networks are proposed to effect functional adaptive control for han-
dling the trajectory tracking problem in a nonholonomic wheeled mobile robot. The scheme is developed in
discrete time and the multilayer perceptron neural networks are used for the estimation of the robot’s nonlinear
kinematic functions, which are assumed to be unknown. On-line weight tuning is achieved by employing the
extended Kalman filter algorithm based on a specifically formulated multiple-input, multiple-output, stochas-
tic model for the trajectory error dynamics of the mobile base. The estimated functions are then used on a
certainty equivalence basis in the control law proposed in (Corradini et al., 2003) for trajectory tracking. The
performance of the system is analyzed and compared by simulation.
1 INTRODUCTION
The last fifteen years have witnessed extensive re-
search activity on the use of artificial neural networks
for adaptive estimation and control of nonlinear sys-
tems. Since the classical pioneering paper by Naren-
dra and Parthasarathy (Narendra and Parthasarathy,
1990), numerous neural network-based algorithms
and stability proofs have been published, covering
different types of neural networks and various system
conditions (Fabri and Kadirkamanathan, 2001; Lewis
et al., 1999; Ge et al., 1999).
Robotic systems, being inherently nonlinear and
subject to a relatively high degree of uncertainty, rep-
resent an important area where neural networks hold
much promise for effecting adaptive control. In fact,
artificial neural networks have been used extensively
for the nonlinear estimation problem in motion con-
trol of mobile robots (Fierro and Lewis, 1997; Fierro
and Lewis, 1998; Corradini et al., 2003). Mobile
robots are non-linear, multiple-input, multiple-output
(MIMO) systems. In practical environments they ex-
hibit a high degree of uncertainty in the model para-
meters and are subject to unmeasurable external dis-
turbances. These characteristics necessitate the use
of robust adaptive controllers, possibly incorporating
on-line estimation of the nonlinear functions in the
process model.
In particular, the trajectory tracking problem for
nonholonomic wheeled mobile robots has become
one of the main challenges within the automatic con-
trol research community over the last decade (Fierro
and Lewis, 1995; Fierro and Lewis, 1998; Corradini
and Orlando, 2001; Asensio and Montano, 2002; Ori-
olo et al., 2002; Corradini et al., 2003; Grech and
Fabri, 2004). This research activity is not only justi-
fied by the theoretical challenges posed by this partic-
ular task, but also by a vast array of potential practical
applications in the field of mobile robotics (Corradini
and Orlando, 2001; Ding and Cooper, 2005).
However, algorithms employing neural networks
with an on-line weight tuning facility, underpinning
the adaptation feature, are more sparse (Fierro and
Lewis, 1997; Fierro and Lewis, 1998). Moreover, the
robot models commonly encountered in related liter-
ature are considered to be deterministic and process
noise and external disturbances are often ignored.
In order to address these issues, this paper proposes
the use of on-line function estimation, taking into ac-
count process noise and external disturbances, by us-
ing a specifically formulated MIMO, stochastic model
for the trajectory error dynamics of a mobile robot. A
multilayer percpetron (MLP) neural network is used
to learn these nonlinear dynamics. The proposed sto-
chastic estimation technique used for parameter ad-
justment of the MLP network is an extension of Fabri
66
K. Bugeja M. and G. Fabri S. (2005).
MULTILAYER PERCEPTRON FUNCTIONAL ADAPTIVE CONTROL FOR TRAJECTORY TRACKING OF WHEELED MOBILE ROBOTS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 66-72
DOI: 10.5220/0001182200660072
Copyright
c
SciTePress

and Kadirkamanathan’s (Fabri and Kadirkamanathan,
1998) method for a general nonlinear class of single-
input, single-output (SISO) systems, to underactuated
MIMO robotic systems. The estimated functions are
used in the trajectory tracking control law in (Corra-
dini et al., 2003), to make the robot follow a given
reference trajectory.
The paper is organized as follows. The stochas-
tic discrete-time error dynamic model for the robot
is developed in Section 2. This is then utilized in
developing an on-line, stochastic estimator based on
MLP neural networks in Section 3. The control law in
(Corradini et al., 2003) is revisited and incorporated
with the proposed recursive weight tuning algorithm,
based on extended Kalman filtering in Section 4. Sec-
tion 5 presents simulation results and is followed by a
conclusion in Section 6.
2 PROBLEM STATEMENT
This paper considers a unicycle wheeled mobile ro-
bot. The robot state is expressed as a three di-
mensional vector q, known as the pose, such that
q = [x y θ]
T
where (x, y) is the axle midpoint co-
ordinate and θ is the robot orientation referred to a
fixed frame (Corradini et al., 2003). Similarly, a given
reference trajectory can be described by a reference
derivative vector ˙q
r
, composed of the reference pose
velocities ˙x
r
, ˙y
r
and
˙
θ
r
such that
˙q
r
=
˙x
r
˙y
r
˙
θ
r
=
v
r
cos(θ
r
)
v
r
sin(θ
r
)
ω
r
, (1)
where v
r
and ω
r
are the linear and angular reference
velocities respectively. Commonly, the tracking error
vector e = [e
1
e
2
e
3
]
T
is defined as
e :=
cos(θ) sin(θ) 0
− sin(θ) cos(θ) 0
0 0 1
x
r
− x
y
r
− y
θ
r
− θ
. (2)
The aim is to make e converge to zero so that q con-
verges to q
r
. The resulting tracking error equation
modelled in continuous time is given by
˙e =
v
r
cos(e
3
)
v
r
sin(e
3
)
ω
r
+
−1 e
2
0 −e
1
0 −1
u, (3)
where u is the velocity control input vector, given by
u = [v ω]
T
, where v and ω are the linear and angular
input velocities of the robot, respectively. These are
related to the velocities of the robot wheels.
Discretizing the error dynamics in (3) by using a
first order explicit forward Euler approximation with
sampling interval T seconds and assuming that the
control input vector u remains constant over each
sampling interval, the following discrete time dy-
namic model for the trajectory error vector is ob-
tained:
e
k
= f
k−1
+ G
k−1
u
k−1
, (4)
where the subscript integer k denotes that the corre-
sponding variable is evaluated at time instant kT sec-
onds, and assuming that the sampling interval is cho-
sen low enough for the Euler approximation to hold.
Vector f
k−1
and matrix G
k−1
are defined as:
f
k−1
:=
e
1
k−1
+ T v
r
k−1
cos(e
3
k−1
)
e
2
k−1
+ T v
r
k−1
sin(e
3
k−1
)
e
3
k−1
+ T ω
r
k−1
(5)
G
k−1
:=
−T T e
2
k−1
0 −T e
1
k−1
0 −T
. (6)
Notation-wise we will occasionally drop the time in-
dex subscript where this is obvious. Introducing a
vector of discrete random variables ε
k
, the error dy-
namic model in (4) is converted to the following non-
linear, stochastic, MIMO, error dynamic model:
e
k
= f
k−1
+ G
k−1
u
k−1
+ ε
k
, (7)
where ε
k
is assumed to be an independent, zero-
mean, white, Gaussian-distributed process, with co-
variance matrix R. This stochastic term represents
the process noise and external disturbances.
The error models in (3) and (7) are based only
on the kinematic model of the mobile base. Con-
trol schemes based on a full dynamic model would
capture better the behaviour of the robot (Fierro and
Lewis, 1997; Corradini et al., 2003) because these
take into account dynamic terms such as mass, vis-
cous damping and inertia. However, such controllers
will have more complex control laws when com-
pared with those based upon kinematic modelling
only. Moreover this complexity is increased when
considering that in practice, the values of the dy-
namic process parameters are uncertain or unknown
and may even be time varying. Such complexity
might hinder the practical implementation of these
dynamic control schemes. However, the experimental
results presented in (Corradini et al., 2003) indicate
that by combining neural networks for estimation of
uncertainty in the kinematic model and a kinematic
controller, one gets superior performance in compar-
ison to the stand-alone kinematic control case. The
estimation of uncertainty introduced in the simpler
kinematic model will compensate somewhat for the
ignored dynamic parameters, that would have other-
wise been included in a full dynamic model control
scheme with all its associated complexity.
MULTILAYER PERCEPTRON FUNCTIONAL ADAPTIVE CONTROL FOR TRAJECTORY TRACKING OF
WHEELED MOBILE ROBOTS
67

The work proposed in this paper supports the same
philosophy, but differs from the work presented in
(Corradini et al., 2003) in two main aspects. Primar-
ily, the estimation process developed in this paper is
on-line, enriching the controller with the adaptive fea-
ture. On-line weight tuning algorithms do not require
any preliminary off-line training (Fierro and Lewis,
1998). Consequently, on-line estimators are superior
in handling real-time applications with possible un-
foreseen variations in the process parameters; a typ-
ical scenario in mobile robotics. Secondly, we con-
sider process noise and external disturbances in our
model. These disturbances are modelled as random
processes, as shown in (7). In this manner the result-
ing control scheme is more robust in the presence of
varying process parameters, noise and external distur-
bances.
3 SIGMOIDAL MLP ESTIMATOR
Theoretically speaking, the vector of discrete func-
tions f
k−1
and the matrix of discrete functions G
k−1
,
composing the trajectory error model in (7) are both
known, assuming that the pose vector q is available
at each sampling interval. However, as proposed in
Section 2, neural networks will be employed for the
estimation of these functions recursively, as if they
were totally unknown. This approach is justified since
in a real robot these functions depend on the robot’s
unmodelled dynamics, time-varying parameters and
unmeasurable disturbances.
In this paper two sigmoidal MLP networks, de-
noted by NN
f
and NN
G
, for the estimation of
f
k−1
and G
k−1
respectively, are employed. Unlike
Gaussian radial basis function (RBF) neural networks
(Poggio and Girosi, 1990; Haykin, 1999), which are
also popular in the field of neuro-adaptive control,
MLPs do not posses the possible advantage of linear-
ity in the parameters being estimated. For this rea-
son tuning algorithms for MLPs tend to be more com-
plex and usually result in sub-optimal estimation. On
the other hand, unlike the Gaussian basis functions
in RBFs, the sigmoidal activation functions used in
MLPs are not localized, implying that typically MLP
networks require less neurons than RBF networks for
the same degree of accuracy. This in turn means that
MLP weight tuning algorithms need to handle rela-
tively less parameters, reducing computational inten-
sity, which ultimately speeds up the overall control
loop. Naturally this is imperative in real time digi-
tal control systems. These details become more pro-
nounced when dealing with high dimensional order
systems, as in the case of WMRs, where the number
of neurons increases exponentially with the number of
systems states. This is often referred to as the curse
of dimensionality (Bellman, 1961).
Since the MLP parameters do not appear linearly
in the output equation, as will become clearer
later in the section, nonlinear stochastic estimation
techniques have to be employed. In this paper the
extended Kalman filter (EKF) (Maybeck, 1979),
is used for the recursive estimation of the MLP
networks parameters. This, along with a set of
mathematical operations, is the heart of the stochastic
online weight tuning algorithm proposed next in the
following paragraphs.
Consider the following:
• x
f
k−1
and x
G
k−1
denote the two neural network in-
put vectors of NN
f
and NN
G
respectively. A con-
stant, serving as a neuron bias input, is included in
each of these two input vectors complete defined as
x
f
k−1
:=
e
T
k−1
v
r
k−1
ω
r
k−1
1
T
(8)
x
G
k−1
:=
e
1
k−1
e
2
k−1
1
T
. (9)
• φ
f
and φ
G
are the sigmoidal activation function
vectors, representing the outputs of the correspond-
ing hidden layer, whose ith element is given by
φ
f
i
= 1/
1 + exp(−s
T
f
i
x
f
)
(10)
φ
G
i
= 1/
1 + exp(−s
T
G
i
x
G
)
, (11)
where s
f
i
and s
G
i
are the parameter vectors of the
ith neuron in the hidden layer, characterizing the
shape of that particular sigmoidal activation func-
tion. These sigmoidal parameter vectors form part
of the overall weight vector to be estimated, mean-
ing that each activation function is shaped recur-
sively as part of the tuning process. This detail is
responsible for the undesired nonlinear appearance
of the final weight vector in the output equation.
• L
f
and L
G
denote the number of sigmoidal activa-
tion functions in NN
f
and NN
G
respectively.
• Let the activation function parameter vectors for
NN
f
and NN
G
be grouped in two individual vec-
tors ˆa
f
and ˆa
G
respectively, such that
ˆa
f
:=
h
ˆs
T
f
1
· · · ˆs
T
f
L
f
i
T
(12)
ˆa
G
:=
h
ˆs
T
G
1
· · · ˆs
T
G
L
G
i
T
, (13)
where the symbolˆindicates that the particular pa-
rameter vector is undergoing estimation.
• The employed multilayer feedforward neural net-
work structure yields the following input-output re-
lations for the two neural networks:
ˆ
f
k−1
=
ˆw
T
1
k
φ
f
k−1
ˆw
T
2
k
φ
f
k−1
ˆw
T
3
k
φ
f
k−1
, (14)
ICINCO 2005 - ROBOTICS AND AUTOMATION
68

ˆ
G
k−1
=
ˆw
T
11
k
φ
G
k−1
ˆw
T
12
k
φ
G
k−1
ˆw
T
21
k
φ
G
k−1
ˆw
T
22
k
φ
G
k−1
ˆw
T
31
k
φ
G
k−1
ˆw
T
32
k
φ
G
k−1
, (15)
where
ˆ
f
k−1
and
ˆ
G
k−1
denote the output approxi-
mates of NN
f
and NN
G
respectively. Moreover,
ˆw
i
k
represents the weight vector of the connection
between the sigmoidal activation functions and the
ith output element of NN
f
and similarly ˆw
ij
k
rep-
resents the weight vector of the connection between
the sigmoidal activation functions and the output
element of NN
G
that corresponds to the (ij)th
term of
ˆ
G
k−1
. Notation-wise φ
f
k−1
implies that
the activation function is evaluated for x
f
k−1
and
ˆa
f
k
. The same notation applies for φ
G
k−1
.
• Let us group all the parameters requiring estimation
in two vectors ˆv
f
k
and ˆv
G
k
, corresponding to NN
f
and NN
G
respectively, such that
ˆv
f
k
:=
ˆw
T
1
k
ˆw
T
2
k
ˆw
T
3
k
ˆa
T
f
k
T
(16)
ˆv
G
k
:=
ˆw
T
11
k
ˆw
T
12
k
· · · ˆw
T
31
k
ˆw
T
32
k
ˆa
T
G
k
T
. (17)
• Let z
k
be the complete overall weight vector de-
fined as
ˆz
k
:=
ˆv
T
f
k
.
.
. ˆv
T
G
k
T
. (18)
• Differentiating
ˆ
f
k−1
and
ˆ
G
k−1
u
k−1
with respect to
ˆz
k
, yields the following closed form expressions:
∇
f
k
:=
∂(
ˆ
f
k−1
)
∂(ˆz
k
)
=
∇
f 1
k
.
.
. ∇
f 2
k
(19)
∇
Γ
k
:=
∂(
ˆ
G
k−1
u
k−1
)
∂(ˆz
k
)
=
∇
Γ1
k
.
.
. ∇
Γ2
k
(20)
where ∇
f 1
k
,∇
f 2
k
,∇
Γ1
k
and ∇
Γ2
k
are defined as
follows:
∇
f 1
k
:=
φ
T
f
k−1
0
T
f
0
T
f
0
T
f
φ
T
f
k−1
0
T
f
0
T
f
0
T
f
φ
T
f
k−1
, (21)
where 0
f
denotes a zero vector having the same
length as φ
f
k−1
.
∇
f 2
k
:=
· · · ˆw
1,i
(φ
f
i
− φ
f
i
2
)x
T
f
· · ·
· · · ˆw
2,i
(φ
f
i
− φ
f
i
2
)x
T
f
· · ·
· · · ˆw
3,i
(φ
f
i
− φ
f
i
2
)x
T
f
· · ·
, (22)
where i = 1, . . . , L
f
and ˆw
j,i
denotes the ith el-
ement of the jth output weight vector, ˆw
j
k
. Note
also that in this equation, both φ
f
i
and x
f
corre-
spond to time instant (k − 1).
∇
Γ1
k
:=
γ
v
γ
ω
0
T
G
0
T
G
0
T
G
0
T
G
0
T
G
0
T
G
γ
v
γ
ω
0
T
G
0
T
G
0
T
G
0
T
G
0
T
G
0
T
G
γ
v
γ
ω
, (23)
where γ
v
and γ
ω
are defined as φ
T
G
k−1
v
k−1
and
φ
T
G
k−1
ω
k−1
respectively and 0
G
denotes a zero
vector having the same length as φ
G
k−1
.
∇
Γ2
k
:=
· · · σ
1,i
(φ
G
i
−φ
G
i
2
)x
T
G
· · ·
· · · σ
2,i
(φ
G
i
−φ
G
i
2
)x
T
G
· · ·
· · · σ
3,i
(φ
G
i
−φ
G
i
2
)x
T
G
· · ·
(24)
where i = 1, . . . , L
G
and σ
j,i
is defined as
ˆw
j1,i
v
k−1
+ ˆw
j2,i
ω
k−1
where ˆw
jn,i
denotes the
ith element of the (jn)th output weight vector,
ˆw
jn
k
. Note also that in this equation, both φ
G
i
and
x
G
correspond to time instant (k − 1).
Assuming that, within the space of interest, the neural
network approximation errors are negligibly small
when the complete weight vector ˆz
k
is equal to some
unknown optimal weight vector z
∗
k
. This is justified
in the light of the Universal Approximation Theorem
of neural networks (Haykin, 1999). It follows that the
trajectory error model in (7) can be rewritten, using
the formulated neural networks as approximations for
f
k−1
and G
k−1
. The resulting model is given by
e
k
= h
x
f
k−1
, x
G
k−1
, u
k−1
, z
∗
k
+ ε
k
, (25)
where
h
x
f
k−1
, x
G
k−1
, u
k−1
, z
∗
k
:=
ˆ
f
k−1
x
f
k−1
, v
∗
f
k
+
ˆ
G
k−1
x
G
k−1
, v
∗
G
k
u
k−1
, (26)
with v
∗
f
k
and v
∗
G
k
representing the optimal versions of
ˆv
f
k
and ˆv
G
k
respectively. Finally, let ∇
h
k
denote the
Jacobian matrix of h
x
f
k−1
, x
G
k−1
, u
k−1
, z
∗
k
with
respect to the weight vector z
∗
k
evaluated at z
∗
k
= ˆz
k
,
then it is clear that
∇
h
k
:=
∂
h
x
f
k−1
, x
G
k−1
, u
k−1
, z
∗
k
∂(z
∗
k
)
z
∗
k
= ˆz
k
=
∇
f
k
.
.
. ∇
Γ
k
, (27)
where ∇
f
k
and ∇
Γ
k
are defined in (19) and (20) re-
spectively. Equation (26) indicates that the unknown
weight vector z
∗
k
, does not appear linearly in the out-
put equation in (25). For this reason a nonlinear sto-
chastic estimator is employed in the recursive weight
tuning process detailed in the next section.
4 ADAPTIVE CONTROL
SCHEME
Having derived the stochastic model (25) for the tra-
jectory error dynamics that is dependent on the MLPs
MULTILAYER PERCEPTRON FUNCTIONAL ADAPTIVE CONTROL FOR TRAJECTORY TRACKING OF
WHEELED MOBILE ROBOTS
69

through
ˆ
f
k−1
,
ˆ
G
k−1
and the optimal weight vec-
tor z
∗
k
, it is straightforward to write down the follow-
ing nonlinear state-space equations which are used
next within the EKF algorithm (predictive mode) to
enable the recursive estimation of the neural networks
weights:
z
∗
k+1
= z
∗
k
e
k
= h
x
f
k−1
, x
G
k−1
, u
k−1
, z
∗
k
+ ε
k
, (28)
It is assumed that:
• The initial parameter vector z
∗
0
has a Gaussian dis-
tribution with some mean ¯z and covariance V.
• The process noise vector ε
k
is Gaussian, zero-mean
and uncorrelated in time (i.e. white).
• ε
k
and z
∗
0
are independent, implying that they are
also uncorrelated.
• The conditional density of the parameter vector
z
∗
k+1
is approximately Gaussian. However, it
should be emphasized that the latter is only an ap-
proximation introduced by the EKF, since the non-
linearity of the stochastic model will not conserve
the Gaussian nature in z
∗
k+1
.
From EKF theory (Maybeck, 1979), it follows that
the following recursive weight adjustment rules can
be employed for the estimation of the weight vector:
P
k+1
= P
k
− K
k
∇
h
k
P
k
(29)
ˆz
k+1
= ˆz
k
+ K
k
i
k
, (30)
where K
k
is the Kalman gain matrix given by
K
k
= P
k
∇
T
h
k
∇
h
k
P
k
∇
T
h
k
+ R
−1
(31)
and i
k
is the innovations vector given by
i
k
= e
k
− h
x
f
k−1
, x
G
k−1
, u
k−1
, ˆz
k
. (32)
P
k+1
denotes the prediction covariance matrix and
represents a measure of the accuracy of the estimate
ˆz
k+1
. The initial conditions for the weight vector and
the prediction covariance are set to some desired val-
ues ¯z and V respectively.
For each estimate of ˆz
k
, the corresponding esti-
mates
ˆ
f
k−1
and
ˆ
G
k−1
are computed using the formu-
lated relations given by (8) to (18). These estimates
are then used recursively in the control law adopted
from (Corradini et al., 2003), making the overall con-
trol scheme adaptive, since the process model used
for control is now being estimated in real-time and
requires no preliminary off-line training.
Note that the extra computational burden that
comes along with the EKF, in comparison to other
non-stochastic techniques such as back-propagation,
pays off in several ways. Primarily, it renders the
recursive weight tuning algorithm stochastic, since
the uncertainty in the process model is taken into ac-
count by the EKF algorithm. Secondly, the condi-
tional probability density of the error vector e
k
is be-
ing updated in real time. The resulting information,
most importantly the covariance matrix P
k
, is essen-
tial in the design of stochastic control laws (Fabri
and Kadirkamanathan, 2001), which are part of our
plan for future work. On the other hand, it is widely
known that the assumption of local linearity inher-
ent in the EKF, may lead to convergence problems
in highly nonlinear applications. For this reason fu-
ture investigation of other nonlinear estimation tech-
niques, such as the Unscented Kalman Filter (UKF)
(Julier and Uhlmann, 1997) is desirable.
The discrete error model utilized in (Corradini
et al., 2003) is effectively given by
e
k
=
e
1
k−1
+ h
2
(e
3
k−1
, v
r
k−1
)
e
2
k−1
+ h
4
(e
3
k−1
, v
r
k−1
)
e
3
k−1
+ h
5
(ω
r
k−1
)
+
−T h
1
(e
2
k−1
)
0 h
3
(e
1
k−1
)
0 −T
u
k−1
, (33)
where h
1
to h
5
represent nonlinear functions, appro-
priately defined in (Corradini et al., 2003). Compar-
ing (33) with the stochastic model in (7) and ignoring
the stochastic term, the following relations become
evident:
h
1
(e
2
k−1
) = g
12
k−1
h
2
(e
3
k−1
, v
r
k−1
) = f
1
k−1
− e
1
k−1
(34)
h
5
(ω
r
k−1
) = f
3
k−1
− e
3
k−1
,
where f
i
and g
ij
denote the ith and (ij)th element
in f
k−1
and G
k−1
respectively. Hence the estimates
ˆ
f
k−1
and
ˆ
G
k−1
provided by the neural networks, can
be used to estimate h
1
, h
2
and h
5
recursively accord-
ing to (34). These are then used in the control law
proposed in (Corradini et al., 2003), given by
v
k
=
1
T
{k
1
e
1
k
+ h
1
(e
2
k
)ω
k
+ h
2
(e
3
k
, v
r
k
)}
ω
k
=
1
T
{h
5
(ω
r
k
) + k
2
e
2
k
+ k
3
e
3
k
}. (35)
The design parameters k
1
, k
2
and k
3
can be selected
according to the following set of relations:
k
1
= 1 − λ
1
k
2
= 2 − λ
2
− λ
3
(36)
k
3
=
1
T v
r
k
(1 − λ
2
− λ
3
+ λ
2
λ
3
),
with λ
1
, λ
2
and λ
3
being the eigenvalues of the re-
sulting closed loop error discrete dynamics, that must
be placed inside the unity circle to guarantee local
asymptotic stability as suggested in (Corradini et al.,
2003).
ICINCO 2005 - ROBOTICS AND AUTOMATION
70

5 SIMULATION RESULTS
The proposed on-line adaptive control scheme was
verified and compared to the non-adaptive scheme
proposed in (Corradini et al., 2003) by simulations.
The mobile robot was simulated through a discrete-
time model whose error dynamics were given in (7).
The covariance R of the noise vector ε
k
was set to
1 × 10
−6
I
3
, where I
i
denotes an (i × i) identity ma-
trix. Neural network pre-training is not used and, to
demonstrate further the adaptive feature of the pro-
posed controller, the model used for simulations is
abruptly modified by replacing T by 1.5T in (7) in the
middle of the simulation, specifically at 12.5 seconds.
This has the effect of modifying the robot model
considerably without altering its kinematic structure.
The selected reference trajectory was generated recur-
sively (one time step ahead) using:
x
r
(t) = 2 cos(0.25t),
y
r
(t) = 2 sin(0.5t), (37)
θ
r
(t) = arctan ( ˙y
r
/ ˙x
r
) ,
which define a figure-of-eight path in the x-y plane.
Neural networks NN
f
and NN
G
were structured
with 18 and 1 hidden unit neurons respectively. The
EKF initial covariance P
0
was set to 5I
α
, where α is
the total number of weights. The initial weight val-
ues were randomly generated from a normal distrib-
ution with zero mean. The controller design parame-
ters were set according to (36) with the eigenvalues
placed inside the unity circle. Several simulation tri-
als were conducted, each indicating good tracking and
repeatable performance for the proposed algorithm.
A number of results from a particular 25 second du-
ration simulation, with a time step of 10 ms, are de-
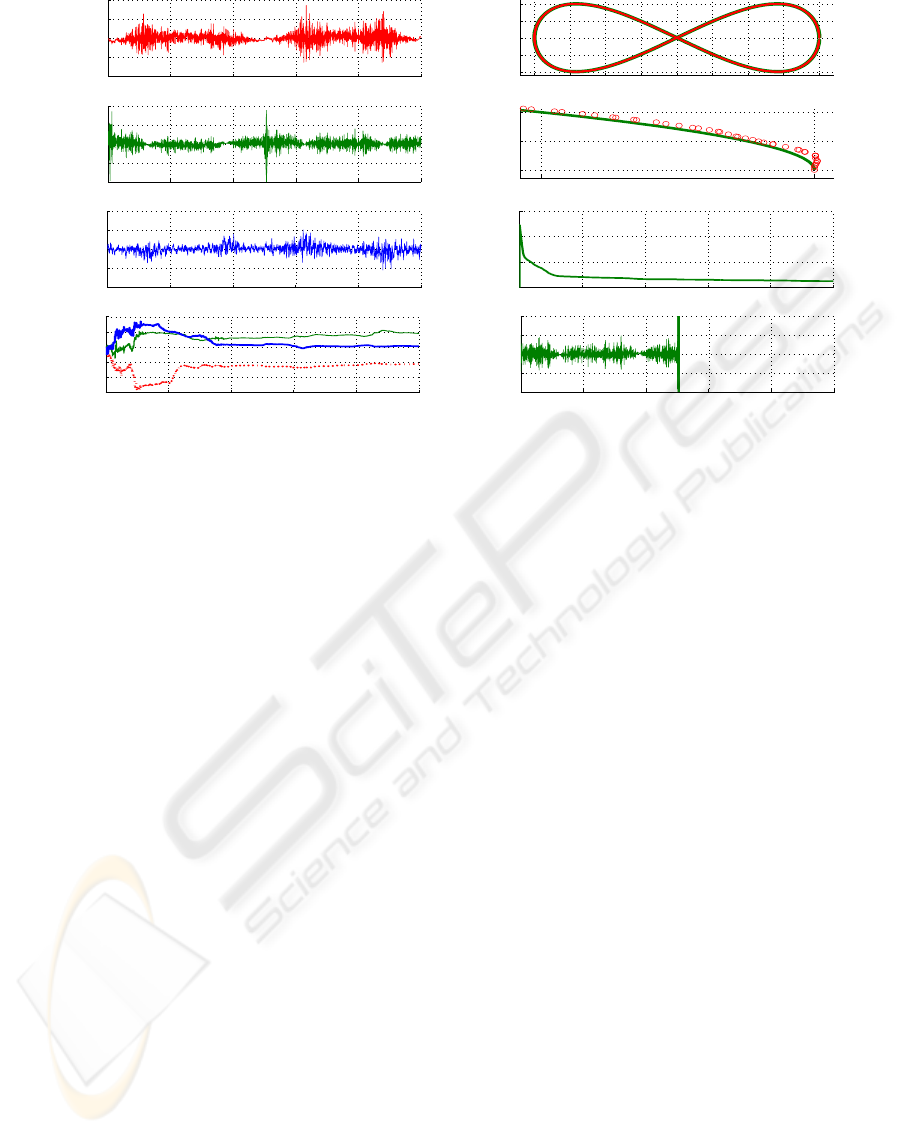
picted in Figure 1.
Referring to Figure 1, plots (a) to (g) were gen-
erated using the proposed adaptive controller while
plot (h) corresponds to the non-adaptive controller
proposed in (Corradini et al., 2003) under the same
specified simulation conditions and assuming that the
original robot functions are known. Primarily one
should note that the pose errors shown in plots (a),
(b) and (c) remain well bounded about zero during the
whole trajectory, indicating that the proposed scheme
has learned the nonlinear functions and yields stable
control throughout the simulation, including the pe-
riod following the previously mentioned model vari-
ation at time 12.5 seconds. This variation is over-
come with no more than a slight error transient vis-
ible in (b). This transient dies out quickly once the
controller adapts to the recently modified model. By
contrast, plot (h) reveals that the non-adaptive method
proposed in (Corradini et al., 2003) goes unstable just
after this model variation.
The complete trajectory path in the x − y plane is
superimposed on the reference trajectory in plot (e).
The two are hardly distinguishable due to the good
tracking performance obtained. The relatively high
deviation in the initial part of the trajectory, magnified
in plot (f), corresponds to the learning phase of the
neural networks, which require no preliminary off-
line training.
The neural network weights remain well bounded
at reasonable values. Plot (d) depicts time plots for
three particular weights, selected arbitrarily. For these
particular simulations, the absolute maximum and
minimum weight values over the two trajectories were
8.2 and −9.4 respectively, with the majority of the
weights centred about zero. This indicates that the
proposed algorithm is also practically realizable as no
infinitely high neural network weights are required.
As a result, the control velocities v and ω remained
well bounded with decent magnitudes.
Plot (g) depicts the mean of the diagonal of the co-
variance matrix P
k
in time. This is used to indicate
the uncertainty in the estimated weights, as generated
recursively by the EKF. As expected, the uncertainty
decreases with time, indicating that the EKF is stable
and the neural network estimations are continuously
improving. The slope of this curve is related to the
learning rate of the system.
6 CONCLUSIONS
In this paper a neural network adaptive control
scheme for the trajectory tracking problem of mo-
bile robots is proposed. The resulting algorithm re-
quires no preliminary information about the process
non-linear functions and uses MLP neural networks,
trained online in consideration of the process uncer-
tainties and external disturbances by using the EKF.
The designed scheme was tested repeatedly by simu-
lation for several noise conditions and sudden model
variations, modeling the uncertainty and time-varying
parameters encountered in practical environments. In
contrast to the non-adaptive scheme proposed in (Cor-
radini et al., 2003), the robot exhibited good tracking
performance in each case.
Future research will include the development of
stochastic non-linear control laws (Fabri and Kadirka-
manathan, 2001), which would take into account
the neural network approximation errors recursively
through the readily available covariance matrix P
k
.
Such a controller would then be amalgamated with the
estimation algorithm developed in this paper, replac-
ing the current heuristic certainty equivalence control
law. This is anticipated to give better transient perfor-
mance due to its stochastic features. Stability proofs
in the ambience of stochastic control are very rare due
to the complexity of random processes, but is still part
of our agenda for future work.
MULTILAYER PERCEPTRON FUNCTIONAL ADAPTIVE CONTROL FOR TRAJECTORY TRACKING OF
WHEELED MOBILE ROBOTS
71
0 5 10 15 20 25
−10
−5
0
5
10
(a)
x
r
− x (mm)
0 5 10 15 20 25
−20
−10
0
10
20
(b)
y
r
− y (mm)
0 5 10 15 20 25
−4
−2
0
2
4
(c)
θ
r
− θ (deg)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1
0
1
2
(e)
y (m)
x (m)
1.99 2
0
0.2
0.4
(f)
x (m)
y (m)
0 5 10 15 20 25
0
2
4
6
(g)
Diagonal mean of P
k
0 5 10 15 20 25
−3
−2
−1
0
1
2
(d)
time (s)
Some neural network weights
0 5 10 15 20 25
−20
−10
0
10
20
(h)
time (s)
y
r
− y (mm)
Figure 1: Proposed algorithm: (a) error in x, (b) in y, (c) in θ, (d) some weights, (e) complete reference (—) and actual (◦)
trajectories, (f) initial phase of (e), (g) diagonal mean of P
k
. Non-adaptive algorithm: (h) error in y.
REFERENCES
Asensio, J. R. and Montano, L. (2002). A kinematic and dy-
namic model-based motion controller for mobile ro-
bots. In Proc. 15th IFAC World Congress on Auto-
matic Control (b’02), Barcelona, Spain.
Bellman, R. (1961). Adaptive Control Processes: A Guided
Tour. Princeton University Press, Princeton, NJ.
Corradini, M. L., Ippoliti, G., and Longhi, S. (2003). Neural
networks based control of mobile robots: Develop-
ment and experimental validation. Journal of Robotic
Systems, 20(10):587–600.
Corradini, M. L. and Orlando, G. (2001). Robust tracking
control of mobile robots in the presence of uncertain-
ties in the dynamic model. Journal of Robotic Sys-
tems, 18(6):317–323.
Ding, D. and Cooper, R. A. (2005). Electric-powered
wheelchairs. IEEE Control Systems Magazine,
25(2):22–34.
Fabri, S. G. and Kadirkamanathan, V. (1998). Dual adaptive
control of nonlinear stochastic systems using neural
networks. Automatica, 34(2):245–253.
Fabri, S. G. and Kadirkamanathan, V. (2001). Functional
Adaptive Control: An Intelligent Systems Approach.
Springer-Verlag, London, UK.
Fierro, R. and Lewis, F. L. (1995). Control of a nonholo-
nomic mobile robot: Backstepping kinematics into
dynamics. In Proc. 34th Conference on Decision and
Control (CDC’95), pages 3805–3810, New Orleans,
LA.
Fierro, R. and Lewis, F. L. (1997). Robust practical point
stabilization of a nonholonomic mobile robot using
neural networks. Journal of Intelligent and Robotic
Systems, 20:295–317.
Fierro, R. and Lewis, F. L. (1998). Control of a non-
holonomic mobile robot using neural networks. IEEE
Trans. Neural Networks, 9(4):589–600.
Ge, S. S., Lee, T. H., and Harris, C. J. (1999). Adap-
tive Neural Network Control of Robotic Manipulators,
volume 19 of World Scientific Series in Robotics and
Intelligent Systems. World Scientific Publishing Co
Pte Ltd, USA.
Grech, R. and Fabri, S. G. (2004). Trajectory tracking of a
differentially driven wheeled mobile robot in the pres-
ence of obstacles. In Proc. 12th Mediterranean Con-
ference on Control and Automation (MED’04), Izmir,
Turkey.
Haykin, S. (1999). Neural Networks: A Comprehensive
Foundation, chapter 5. Prentice Hall, London, UK.
Julier, S. J. and Uhlmann, J. K. (1997). A new ex-
tention of the Kalman filter to nonlinear systems.
In Proc. of AeroSense: The 11th Int. Symp. on
Aerospace/Defence Sensing, Simulation and Controls.
Lewis, F. L., Jagannathan, S., and Yesildirek, A. (1999).
Neural Network Control of Robot Manipulators and
Nonlinear Systems. Taylor and Francis, Padstow, UK.
Maybeck, P. S. (1979). Stochastic Models, Estimation and
Control, volume 141-1 of Mathematics in Science and
Engineering. Academic Press Inc., London, UK.
Narendra, K. S. and Parthasarathy, K. (1990). Identifica-
tion and control of dynamical systems using neural
networks. IEEE Trans. Neural Networks, 1(1):4–27.
Oriolo, G., Luca, A. D., and Vendittelli, M. (2002). WMR
control via dynamic feedback linearization: Design,
implementation and experimental validation. IEEE
Trans. Contr. Syst. Technol., 10(6):835–852.
Poggio, T. and Girosi, F. (1990). Networks for approxima-
tion and learning. Proc. IEEE, 78(9):1481–1497.
ICINCO 2005 - ROBOTICS AND AUTOMATION
72
