
REMOTE LABORATORY EXPERIMENTS ADDRESSING PATH
PLANNING FOR MOBILE ROBOTS
Grzegorz Zyśko, Florian Zeiger, Klaus Schilling, Markus Sauer
Department of Computer ScienceVII - Robotics and Telematics, Bayerische Julius-Maximilians Universität Würzburg,
Am Hubland D-97074, Wuerzburg, Germany
Keywords: Remote experiment, inverse kinematics, nonholonomic, mobile robot, eLearning.
Abstract: This paper describes an educational remote experiment for path planning with mobile robot hardware which
is accessible via the internet. The experiment uses a nonholonomic car-like mobile robot with an Ackerman-
steering and demonstrates the problems of the inverse kinematics of this kind of mobile robot. It emphasizes
the educational aspects, shows how to combine primitive manoeuvres in order to solve the inverse
kinematics problem, and gives a detailed description of these manoeuvres.
1 INTRODUCTION
Introducing the new media and the internet provides
new possibilities for eLearning. In the last years,
remote laboratories and tele-experiments were
created in order to improve the quality of education.
Many of these remote-experiments are related to
control methods like PI-Controller or the control of
other processes. Providing remote experiments with
mobile robots and especially real hardware
experiments with mobile robots are not so popular.
There are few remote-laboratories working with real
mobile robots (cf. 0/2003a/2003b and 0). (0) uses a
Path Following algorithm, but the experiment is
based on a tracked robot. The experiments in (0 and
2003a are related to the inverse kinematics problem
of a differential drive robot and the PI-Control of the
robot's velocity. These kinds of nonholonomic
mobile robots require less space and the control
methods are easier compared to car-like mobile
robots with an Ackerman steering. 0 presents an
experiment to a nonholonomic motion planner
(NHMP), but this experiment does not use a real car-
like mobile robot. Instead a movable platform to
simulate the nonholonomic behavior of the robot is
use. On that account, this experiment does not
provide the same problems like friction, deviations
because of the mechanical construction, and slippage
like using real car-like mobile robot hardware.
This work presents an experiment of a remote
laboratory which is focused on real hardware
experiments with nonholonomic car-like mobile
robots. The students are starting with experiments of
the forward kinematics where a kinematics model of
the car-like mobile robot is introduced. The
students’ task is to find several variables which are
necessary do build the model e. g. systematic errors
for encoders and gyro, deviations of the mechanical
driving mechanism and accuracy of a fuzzy distance
controller (cf. 0/2004b).Then dynamic and control
aspects are presented in a PI-Controller experiment
(cf. 0/2004b).
The present experiment is a first approach to
build a remote exercise related to Path Planning
methods for nonholonomic car like mobile robots
with Ackerman steering. This Experiment is an
“interface” between an existing forward kinematics
exercise and a new one related to Path planning.
Presented exercise give students the opportunity to
check validity of the created model. The obtained
variables are used to estimate the position of the
robot, after simple or complex motions.
2 EXPERIMENT OUTLINE
The presented remote experiment uses the
experiment area and infrastructure (cf. Fig. 1) of the
remote laboratory for car like mobile robots of the
University of Würzburg shown in 0 and 0.
Performing a remote experiment consists of three
steps. At first, the students get a tutorial. This
431
Zy
´
sko G., Zeiger F., Schilling K. and Sauer M. (2005).
REMOTE LABORATORY EXPERIMENTS ADDRESSING PATH PLANNING FOR MOBILE ROBOTS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 431-434
DOI: 10.5220/0001178504310434
Copyright
c
SciTePress

tutorial describes several sub-experiments and gives
basic information to the subject. After students
finished this tutorial, they can pass an online exam
with test questions. Finally the control GUI for the
robot can be accessed and the hardware experiment
described in the tutorial can be performed with our
MERLIN robot (cf. Fig. 3). The design of these
online-experiments is well tested and was evaluated
in previous projects.
The experiment described in this paper consists
of 3 steps, a simulation of different methods of
motion, a test of the simulation results on real
hardware, and finally a demonstration and analysis
of three different path planning approaches.
At first, the students are introduced to the basic
motion of a car-like mobile robot. Afterwards the
students are able to combine basic motions to
primitive maneuvers, like three-point-turn and
sidewise shifting (cf. Section IV). The next step
introduces the students to the combination of
primitive maneuvers to complex maneuvers for
achieving a certain configuration. In order to
highlight issues related to robot maneuverability and
robot control, we assume that obstacle avoidance is
solved by path planning comparisons, and string
concatenations.
Figure 1: Area for the experiments with MERLIN
After the students are familiarized with the
primitive maneuvers (cf. Section IV), a simulation is
provided. Here the inaccuracy of the distance
controller and the influence of this deviation on the
finally achieved pose are demonstrated. These
simulation results are now tested on our real
MERLIN hardware and the students experience the
difference between simulations and the real
hardware. Here students can see the influence of a
deviation of the distance controller in open loop
control and they can analyze the effects of an
orientation error while performing complex
maneuvers. They compare these different maneuvers
with respect to environmental influences and
parameters like the available free space, the required
accuracy, and the traveled distance.
Finally, several path planning algorithms (cf. 0)
like the Road Map, the Potential Fields, and the
Distance Transform methods are presented. The
experiment provides a GUI to the students where
they can examine these three methods and analyze
their usability for different maps. These methods
always return a path that has to be transformed into
segments which are navigable by the used mobile
robots. Therefore we derive a path which consists of
primitive maneuvers. Now, the students can learn
how to combine the methods of path planning and
the different primitive maneuvers in order to move
the robot to a certain configuration.
3 INVERSE KINEMATICS OF
CAR-LIKE MOBILE ROBOTS
Inverse kinematics for nonholonomic mobile robots
with Ackerman-steering is a complex problem due
to the constraints described in Latombe, 1993. A
solution (path) can not be represented by a single
motion or mathematical equation. It was proven 0
that, despite this limitation, the robot remain fully
controllable. For these purposes a combination of
several primitive maneuvers were created. The
experiment provides these maneuvers to the students
for theoretical analysis and tests with real hardware.
1) Primitive Maneuvers: For car-like mobile
robots 0 introduced primitive maneuvers for rotation
and shifting. For the rotation, we use the three-point-
rotation as described in 0 (cf. Fig.3). Here, the path
of the robot consists of two circular arcs of a given
length, a given radius, and a tangential connection
between them. This primitive maneuver enables the
robot to perform clockwise or counter-clockwise
rotations.
For performing a sidewise motion of the robot,
we present the students the typical maneuver for
shifting as it is described in 0. Due to the kinematics
constraints of a mobile robot with an Ackerman-
steering, this maneuver is based on performing
motions on a circle arc with a suitable radius and a
suitable length and moving on a tangential line from
one circle arc to another circle arc (cf. Fig.2).
ICINCO 2005 - ROBOTICS AND AUTOMATION
432
dist
d
1
d
3
d
2
d
1
d
2
d
3
α
Figure 2: Shifting maneuver (left side) and rotation
maneuver (right side).
One of the common problems of the inverse
kinematics of nonholonomic mobile robots is the
required space. Usually, experiments of inverse
kinematics of mobile robots require a large
experiment area. In Fig.2 we see that the typical
maneuver presented in 0 requires enough space in
each direction of the robot. In a small experiment
area, it could be necessary to modify this maneuver
in a slight way because of the limited space on at
least one side of the robot. Fig. 3 presents two
alternative maneuvers for shifting.
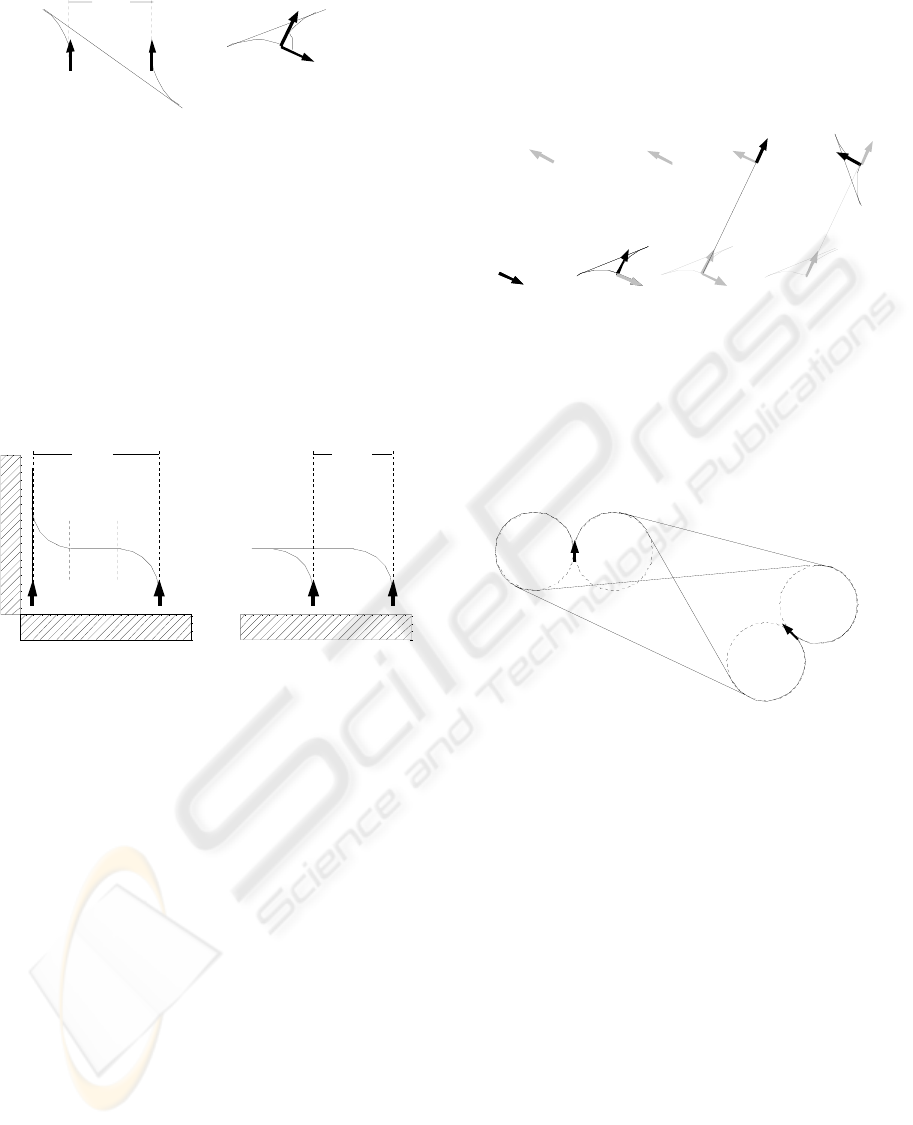
dist
d
1
d
2
d
3
d
4
dist
d
1
d
2
d
3
Maneuver A Maneuver B
Figure 3: Alternative methods to shift a nonholonomic
mobile robot
If the robot's starting configuration is located too
close to a wall it is impossible to perform a circular
motion in the direction of the wall. In this case, we
have two possibilities to shift MERLIN.
Maneuvers A and B are still applicable if the
robot is placed close to some obstacles. For the
mathematical representation let R be the minimum
turning radius, d be the wheelbase, and dist be the
distance the robot should be moved sidewise.
2) Complex Maneuvers: To familiarize students
to the problems of the inverse kinematics, we
present two more complex maneuvers to reach a
given configuration.
At first we use the same two primitive
maneuvers like introduced for the differential drive
mobile robot: two rotations and a straight-line
movement. At first the robot performs a three-point
rotation (see Fig. 4b) to the direction of the target
position. Then it moves to the position where the
second rotation should take place (Fig. 4c). After the
second rotation (cf. Fig. 4d), the target pose ptarget
is reached. This approach can use up to seven basic
movements: the rotations consist of three
movements on circle arcs each and the straight-line
movement.
p
start
p
target
a) b) c) d)
Figure 4: Rotate-move-rotate maneuver for a
nonholonimic car-like mobile robot
The second approach consists of driving on two
segments of circle arcs and one tangential
connection between them (cf. Fig.5). Using this
method we need a maximum of three basic motions
to reach any target configuration.
p
start
p
target
Figure 5: Driving on two circle arcs and their tangential
connections as complex maneuver for navigating to a
target pose
Fig.5 presents only some possible traces from the
start configuration to the end configuration.
Connecting these two pairs of circles with tangential
lines results, always in nine traces to the new
position. Then the most suitable trace can be chosen
with respect to the environmental parameters
4 PATH PLANNING
The hardware experiments are concluded by a
simulation of three basic path planning approaches.
The students are introduced to the Road Map, the
Potential Field, and the Distance Transform method.
The students examine the performance and usability
of these methods with different environmental maps
with varying obstacle arrangements.
So they can decide which path planning method
is the most applicable for the different situations.
REMOTE LABORATORY EXPERIMENTS ADDRESSING PATH PLANNING FOR MOBILE ROBOTS
433

After the usability of the path planning methods is
analyzed, the students have to combine their
knowledge gained in previous experiments. The
provided simulation tool considers a point-robot.
Thus, kinematics constraints are not included and
the resulting path of this path planning method will
not be navigable by MERLIN.
Now students learned the necessary basic
knowledge about path planning and the basics about
the inverse kinematics of a car-like mobile robot. In
a next experiment they are able to combine this
knowledge to perform experiments related to
docking or the parking problem.
5 CONCLUSIONS AND FUTURE
WORK
According to our knowledge, we present the first
remote experiment related to the inverse kinematics
and the path planning for nonholonomic car-like
mobile robots, which is accessible via the internet.
The experiment starts from the basic motions of
nonholonomic mobile robots and demonstrates the
students how to combine these basic motions to get
some complex maneuvers. The students compare
several dedicated maneuvers for moving MERLIN
to a certain configuration. They are introduced to
sources of deviations (cf. 0, Zysko, 2004b) and the
effect of these deviations on the final configuration.
The students learn to estimate the expected
deviations when these maneuvers are performed
with the real hardware and they can choose the
appropriate maneuver for the individual needs.
In the end, our experiment provides some path
planning approaches (cf. 0) to give the students an
idea how they can use the gained knowledge about
inverse kinematics and introduces them to the
following experiment for the docking or parking
problem.
In the future we intend to extend the existing
experiments with algorithms using feedback in order
to achieve better accuracy.
ACKNOWLEDGMENT
Part of this work has been supported by the LearNet
project (http://www.learnet.de/) and a cooperation
between the University of Würzburg and the
"Virtuelle Hochschule Bayern" (
http://www.vhb.org/),
whereas LearNet was funded by the German
Ministry of Education and Research. We appreciated
the financial support provided for part of this
research within the “EU-India” program of the
European Union and the PPP China program by the
German Academic Exchange Service DAAD.
REFERENCES
Casini M., Prattichizzo D., Vicino A., Remote Control Of
A Lego Mobile Robot Through The Web, IFAC
Workshop Grenoble 2004
Schilling, K., Roth H., Roesch O. (eds.), Tele-Education in
Mechatronics Based on Virtual Laboratories, R.
Wimmer Verlag, (2001)
Schilling K., Popescu D., Meng Q., Roth H., Mobile
Roboter, D. Schmid, G. Gruhler, A. Fearns (eds.),
eLearning - Experimente und Laborübungen zur
Automatisierungstechnik über das Internet, Verlag
Europa Lehrmittel 2003, p. 137 - 146
Schilling K., Spilca C., Roth H., Levesque J.-F.,
Experiment zur PID-Regelung des Motor eines
mobilen Roboters, D. Schmid, G. Gruhler, A. Fearns
(eds.), eLearning - Experimente und Laborübungen
zur Automatisierungstechnik über das Internet, Verlag
Europa Lehrmittel 2003, p. 96 - 102.
Dormido, S. (ed.), Proceedings IFAC Workshop on
Internet Based Control Education,Pergamon Press
(2001)
Bicchi A., Caiti, A., Pallottino, L., Tonietti, G. Online
Robotic Experiments for TeleEducation at the
University of Pisa. Int. Journal of Robotic Systems, (in
press), 2004
Zysko G., Barza R., Schilling K., 2004. Tele Lab Using
Non-holonomic Car-Like Mobile Robot, IFAC
Workshop Grenoble 2004
Zysko G., Barza R., Schilling K., Lei Ma, Driewer F.,
2004. Remote Experiments on Kinematics and Control
of Mobile Robots, In Proceedings 5th IFAC
Symposium on Intelligent Autonomous Vehicles, IAV
2004, Lisbon
Latombe J.-C., Robot Motion Planning, Kluwer Academic
Publishers, 1993.
ICINCO 2005 - ROBOTICS AND AUTOMATION
434
