
AN INTELLIGENT VEHICLE APPROACH TO MOBILE
VEHICULAR AD HOC NETWORKS
Clustering Optimisation in Dynamic Traffic Networks
James G. Haran, Peng Fan
University of Illinois at Chicago, Department of Computer Science,
851 S. Morgan (M/C 152), Room 1120 SEO, Chicago, IL 60607-7053 USA
Peter Nelson, John Dillenburg
University of Illinois at Chicago, Department of Computer Science,
851 S. Morgan (M/C 152), Room 1120 SEO, Chicago, IL 60607-7053 USA
Keywords: Mobile Ad Hoc Networks (MANETs), Vehicular Ad Hoc Networks (VANETs), Intelligent Transportation
Systems (ITS), Inter-Vehicle Communication (IVC), Dedicated Short Range Communications (DSRC),
Distributed Clustering Algorithm (DCA).
Abstract: The application of Mobile Ad Hoc Network (MANET) technologies to Vehicular Ad Hoc Networks
(VANETs) in the service of Intelligent Transportation Systems (ITS) has brought new challenges in
maintaining communication clusters of network members for long time durations. Stable clustering
methods reduce the overhead of communication relay in MANETs and provide for a more efficient
hierarchical network topology. During creation of VANET clusters, each vehicle chooses a head vehicle to
follow. Cluster stability in these simulations is measured by the average number of cluster head changes per
vehicle during the simulation. In this paper we analyse the effects of six different clustering methods in a
simulated highway environment to determine which method provides optimum stability over the simulation
timeline.
1 INTRODUCTION
Vehicular Ad Hoc Networks (VANETs), an
outgrowth of traditional Mobile Ad Hoc Networks
(MANETs), provides the basic network
communication framework for application to an
Intelligent Transportation System (ITS). The U.S.
Federal Communications Commission (FCC) has
recently allocated the 5.85-5.925 GHz portion of the
spectrum to inter-vehicle communication (IVC) and
vehicle-to-roadside communication (VRC) under the
umbrella of dedicated short-range communications
(DSRC). This has fuelled significant interest in
applications of DSRC to driver-vehicle safety
applications, infotainment, and mobile Internet
services for passengers.
Vehicles provide a robust infrastructure for the
creation of highly mobile networks. In addition to
providing a stable environment for the low cost and
robust wireless communication devices typical of ad
hoc networks, vehicles can easily be equipped with
the storage, processing, and sensing devices
necessary in any ITS implementation. A huge
opportunity exists to leverage VANETs to enable a
wide variety of service and societal applications.
VANETs have significant advantages over the
traditional MANET. Vehicles can easily provide the
power required for wireless communication devices
and will not be seriously affected by the addition of
extra weight for antennas and additional hardware.
Furthermore, it can be generally expected that
vehicles will have an accurate knowledge of their
own geographical position, e.g. by means of Global
Positioning Satellite (GPS). Thus, many of the
issues making deployment and long term use of ad
hoc networks problematic in other scenarios are not
relevant in MANETs.
In addition, there is a wealth of desirable
applications for ad-hoc communication between
vehicles ranging from emergency warnings and
224
G. Haran J., Fan P., Nelson P. and Dillenburg J. (2005).
AN INTELLIGENT VEHICLE APPROACH TO MOBILE VEHICULAR AD HOC NETWORKS - Clustering Optimisation in Dynamic Traffic Networks.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 224-231
DOI: 10.5220/0001178002240231
Copyright
c
SciTePress
distribution of traffic and road condition information
to chatting and distributed games. As a consequence
many vehicle manufacturers and their suppliers are
actively supporting research on how to integrate
mobile ad-hoc networks into their products.
Vehicles in a VANET environment move within
the constraints of traffic flow while communicating
with each other via wireless links. Ah hoc networks
use less specialised hardware for infrastructure
support and leave the burden of network stability on
the individual nodes within the network. Without
routers, or other dedicated communication hardware,
a possible method to optimise communication within
the network is to develop a hierarchical clustering
system within the network. This clustering system
would identify certain lead vehicles that act as the
relay point of communication between vehicles local
to that node and other vehicle clusters. To support
the dynamic nature of the VANET environment, the
vehicles clustering must e periodically updated to
reflect topological changes and vehicle movements.
Clustering within the network must be very fast to
minimise time lost to clustering (Johansson, 2004).
A significant amount of research focuses on
optimal methods for clustering nodes in MANETs.
VANETs, however, pose new challenges in cluster
head selection and network stability. VANETs must
follow a tighter set of constraints than MANETs,
and therefore require specialised clustering
algorithms. First, nodes or vehicles cannot
randomly move within the physical space, but must
instead follow constraints set in place by the real
road network topology. Second, vehicle movements
follow well-understood traffic movement patterns.
Each vehicle is constrained by the movements of
surrounding vehicles. Third, vehicles generally
travel in a single direction and are constrained to
travel within a two-dimensional movement. Given
these movement restrictions and the knowledge of
position, velocity, and acceleration common
available to on-board vehicle systems it is possible
to approach clustering more intelligently and
possibly discover a better clustering methodology
for VANET environments.
The constrained environmental conditions of
VANETs warrant a constrained simulation
environment. Many simulation tools and
environments have been designed for MANET
implementations. These tools, however, fail to
adequately model the needs of a VANET network.
Compared to the random movements modelled in
MANET environments, VANET simulation
movements must behave according to traffic patterns
in terms of car-following, lane-changing, directional
movement, velocity, and acceleration among others.
Current MANET simulation environments cannot be
considered suitable for VANET simulations even in
the broadest sense. Therefore, simulation of the
network environment is best performed with traffic
micro-simulation tools. For the purpose of this
study, simulation and traffic modelling was
performed using a micro-simulation tool specially
modified to perform randomised vehicle-based
clustering under a number of algorithms and traffic
constraints. This approach also allows further
research on traffic statistics and flow improvements
as a result of network communication. Further
modifications to the environment were made to log
vehicle cluster, position, velocity, and acceleration
states during simulation activity.
This work outlines the performance of basic
MANET algorithms in the constrained micro-
simulation model and the further evaluation of
algorithms specifically designed to utilise vehicle
state information. In addition, a utility function
design is outlined for controlling the per-vehicle
clustering methods. Association with and
dissociation from clusters, as a result of the mobile
nature of VANET nodes (vehicles) perturb the
network and cluster selections. Cluster
reconfiguration and cluster head changes are
unavoidable. Therefore, a good VANET clustering
algorithm should seek to regulate rather than
eliminate cluster changes. This algorithm should
also maintain cluster stability as much as possible
during vehicle velocity and acceleration changes
and/or traffic topology shifts. Otherwise, the
overhead of cluster re-computation and the involved
information exchange will result in high
computational cost and negate the benefits of
VANET communication. The ideal VANET cluster
will maintain its cluster head and members over the
longest possible time range. This concept will be
explained and evaluated further later in this paper.
2 BACKGROUND AND RELATED
WORK
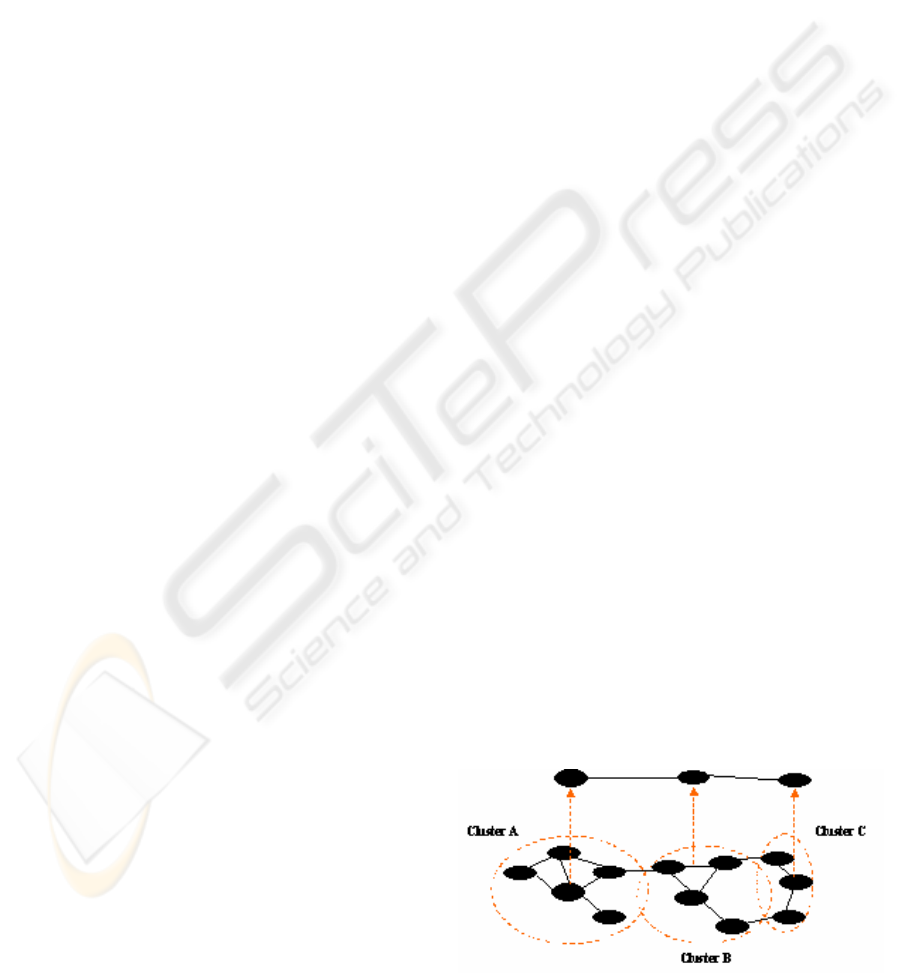
Figure 1: Clustering within a 12-node MANET
environment
.
AN INTELLIGENT VEHICLE APPROACH TO MOBILE VEHICULAR AD HOC NETWORKS - Clustering
Optimisation in Dynamic Traffic Networks
225
Communication network clustering organises the
network nodes into a hierarchical arrangement.
Figure 1 provides and example of the organisation of
twelve nodes into three clusters. The basic
communication capability between the twelve nodes
is outlines as connections between the lower tier of
the hierarchy. These twelve basic nodes are then
grouped into clusters using some algorithm. In the
upper tier of Figure 1, the three cluster head nodes
are displayed with connections between them
representing the possible message paths under the
cluster-constrained network (Bettstetter, 2002).
This clustered architecture reduces the
communication relay points for each node to a small
subset of the total network. Each cluster head
aggregates local member topology and acts as a
relay point for communication between its members
and members of other clusters. This reduces the
messages exchanged between individual network
nodes and the overhead of information stored within
those nodes (Garg, 2004).
Attention on clustering in MANETs has increased
considerable as wireless technologies improve and
MANET theories become practice
(Sivavakeesar,
2002, Basagni, 1999, Basagni, 1997). Most of these
approaches embrace the role of a cluster head that
maintains the cluster and provides the entry point of
that cluster into the broader network. Among
several proposed cluster head selection algorithms
the predominant approaches are the (i) Lowest-ID
algorithm and (ii) Highest-Degree algorithm.
Recent work has simulated the performance of these
algorithms using random placement in a square grid
with multi-directional node movement (Basagni,
1999, Gerla, 1995). As previously stated, this does
not translate well into the VANET environment.
2.1 Lowest-ID Algorithm
The Lowest-ID algorithm involves the selection of
cluster heads by means of an absolute ordering of a
fixed vehicle ID attribute. Cluster formation is
performed using node-level election of cluster heads.
During the clustering stage, each node within the
network broadcasts its ID to all other reachable
nodes. Each node, in turn, chooses as its cluster
head the node with the lowest ID. This method has
been discussed in great detail (Gerla, 1995,
Ephremides, 1987, Jiang, 1999) in a number of
works and is well known for its stability in general
MANET applications. In each cluster, the node
within range with the lowest ID becomes a cluster
head and maintains the cluster membership
information of all other nodes.
2.2 Highest-Degree Algorithm
This algorithm uses the degree of the nodes within
the network to determine the cluster heads. The
general idea that choosing high-degree nodes as
cluster head candidates tends to uncover larger
clusters. In MANET implementations, however,
small movements in network nodes can often lead to
a large number of degree changes throughout the
network. This, understandably, has a detrimental
effect on the stability of the clusters over time
(Gerla, 1995). So cluster heads in Highest-Degree
implementations are not likely to maintain cluster
head status for long.
Many additional clustering algorithms have been
defined to meet special-case purposes. This research
focuses on the Lowest-ID and Highest-Degree
algorithms because they have constant time
complexity and good scalability. For convenience,
these algorithms have been summarised in Table 1.
Table 1: Summary of Current Algorithms
Algorithm Strengths Weaknesses
Lowest-
ID
FAST AND SIMPLE.
RELATIVELY STABLE
CLUSTERS
.
Small clusters,
long cluster
head duration.
Highest-
Degree
Most connected nodes
appropriately given
higher priority.
Relatively
unstable
clusters.
“The Lowest-ID clustering was generalised to a
weight-based clustering technique, referred to as the
DCA (Distributed Clustering Algorithm) in
(Basagni, 1999,). In DCA, each node is assumed to
have a unique weight (hence the weights are totally
ordered) instead of just the node ID or degree, and
the clustering algorithm uses the weights instead of
the IDs for the selection of cluster heads. However
the technique of assignment of weights has not been
discussed (Basu, 2001). ”
This document will outline a custom weighting
scheme incorporating traffic-related information in
next section. This implementation will not consider
network broadcasts requiring more than one hop in
communication. This simplifies the overall
communication and clustering strategy and reduces
the overall bookkeeping necessary to maintain the
clusters. This approach seeks to obtain optimal
results by adding traffic-specific information to the
clustering logic.
ICINCO 2005 - ROBOTICS AND AUTOMATION
226

3 TRANSPORTATION-SPECIFIC
CLUSTERING
METHODOLOGY
Review of current MANET research highlights the
need for a transportation-specific review of
clustering methodology and the discovery of traffic-
optimized clustering schemes. This research chose
to design a utility-based methodology for network
cluster formation. In this approach, each vehicle
implements some form of utility analysis of each
proximally located possible cluster head.
Periodically, each vehicle will broadcast general
network information such as ID and current degree
as well as vehicle-specific traffic statistics such as
position, velocity, and acceleration. Upon receipt of
this information, each vehicle chooses a cluster head
by evaluating the utility of each potential head. The
node with the highest utility is selected as the cluster
head.
3.1 Utility Function
A utility-based approach to clustering requires the
creation of a vehicle-specific agent model for
periodic cluster formation. This model was
implemented by augmenting each vehicle in a traffic
micro-simulation platform to periodically determine
and store cluster head information. The cluster head
determination algorithm was implemented in a
single weight method that produced a weight value
for each vehicle with which the current vehicle can
communicate. After implementation of this method,
the Lowest-ID and Highest-Degree methods were
implemented and tested. Once validation of these
algorithms was complete, four other algorithms were
designed and implemented to harness vehicle state
information. Rather than overcomplicate this initial
investigation with compound weighting logic, the
algorithms were chosen to use single parameter
weighting based on a) closest velocity to the current
vehicle, and b) closest position, c) closest velocity,
and d) closest acceleration to the average of all
proximal vehicles. The belief is that these traffic-
specific algorithms will be better predictors of the
common traffic situations that lead to cluster
dissociation.
As an important note on this investigation, an
exhaustive investigation of vehicle parameters and
parameter-specific cluster methods was not
performed or intended. Many other vehicle state
measurements exist and are equally predictors of
traffic movement, but have been fixed for this
experiment.
The four new clustering methods are summarized
as follows:
a) Closest Velocity: A vehicle attempts to join
with other vehicles in a cluster head to member
relationship in order of closest velocity to itself.
b) Closest Position to Average: A vehicle attempts
to choose as its cluster head in order of the
absolute difference of candidate’s position to
the average position of all proximal vehicles.
c) Closest Velocity to Average: A vehicle attempts
to choose as its cluster head in order of the
absolute difference of candidate’s velocity to
the average velocity of all proximal vehicles.
d) Closest Acceleration to Average: A vehicle
attempts to choose as its cluster head in order of
the absolute difference of candidate’s
acceleration to the average acceleration of all
proximal vehicles.
These steps outline the procedure for
implementation of this utility function:
1. Each vehicle determines the vehicles within
range by polling the local broadcast region and
tracking the candidate cluster head set C. All
vehicles with broadcast range are considered
candidate cluster heads.
2. Using candidate set C and the state information
received by broadcast, each candidate is
evaluated using the utility function.
3. The cluster head is chosen in decreasing order
of utility. The petition for cluster membership
is broadcast to the chosen vehicle. Should the
chosen vehicle deny the request the vehicle with
the next highest utility is selected and this step
repeated.
A vehicle may deny the selection as cluster head
if it has reached its maintainable limit of cluster
members or if the vehicle has already chosen to join
with another cluster head. Note, in all algorithms
but method a), a vehicle may elect itself as its cluster
head. Random selection of vehicles simulates
asynchronous cluster formation at fixed time
intervals.
3.2 Vehicular Considerations of
Cluster Formation
Due to the dynamic nature of traffic flow, the
member vehicles as well the cluster heads tend to
move in semi-related motion throughout the
roadway. This motion destabilizes the network
clusters and warrants periodic cluster reformation.
Re-clustering may result in transition of nodes from
one cluster to another, split of a cluster into more
than one cluster, or convergence of multiple clusters
into a single larger cluster. The frequency of cluster
AN INTELLIGENT VEHICLE APPROACH TO MOBILE VEHICULAR AD HOC NETWORKS - Clustering
Optimisation in Dynamic Traffic Networks
227

formation and cluster change is thus an important
consideration in algorithm evaluation.
Equally important is the size of each cluster.
Resource and relay algorithm performance
considerations may limit the manageable size a
cluster head’s cluster. For simplicity this research
used a common fixed upper bound on all vehicle’s
cluster size. The implication is that vehicles may
reject nodes within range due to resource
exhaustion.
The delicate balance between cluster size and
coverage has major implications in network
communication latency and throughput. Each
vehicle communicates with vehicles in other clusters
through the selected cluster heads. Care must be
taken to ensure that the head selection algorithm
does not have the unfortunate result of adding
network transmission bottlenecks. Alternately,
algorithms that yield too many cluster heads may
result in a computationally expensive system. An
important area of study is the selection of cluster
algorithms that balance high throughput and lowest
latency. The performance of the new algorithms
must be measured relative to previously analyzed
MANET algorithms. The objective of this research
is to evaluate the number of cluster changes and the
cluster size for each of our six algorithms.
As discussed, our simple utility functions are
actually one-dimensional weighting methods
considering only one attribute of each candidate
vehicle. MANET research covers many compound
or multi-dimensional clustering algorithms. In
general, these methods are presented to overcome
certain disadvantages of general MANET models
such as power consumption, low mobility, or
random multi-directional movement. These
algorithms have not been modeled because their
contributions to VANET implementations are not
immediately apparent.
4 SIMULATION STUDY
This study modified Traffic Simulation 3.0, an
Intelligent-Driver Model (IDM) (Treiber, 2000)
micro-simulation tool built to monitor traffic flow
under various basic highway configurations. This
environment simulates accelerations and braking
decelerations of drivers (i.e. longitudinal dynamics),
and uses the Minimized Overall Braking Induced by
Lane changes (MOBIL) lane change model. All
model parameters and the initial simulation source
code are available at (Treiber, 2005). This study
focused on the “on ramp” simulation environment.
4.1 Implementation
The source code for the aforementioned simulation
tool was modified to perform fixed interval cluster
formation using either of the six experimental
algorithms (Lowest-ID, Highest-Degree, Closest
Velocity, Closest Position to Average, Closest
Velocity to Average, and Closest Acceleration to
Average). To aid in algorithm visualisation, the
graphical display of the micro-simulation
environment was modified to display vehicle
clusters using contrasting colours.
4.2 Metrics
In addition to utility function and display changes,
periodic state logging was implemented. This data
provided the basis for the simulation result analysis
and algorithm comparison. To measure the system
performance, two metrics were identified: (i) the
average cluster head change per step and (ii) the
average cluster size. Metric (ii) alone does not
accurately depict system performance, so the relative
measurement (ii)/(i) was introduced to provide a
reasonable comparison metric between the analysed
algorithms. A method is considered relatively better
if it has either better stability using metric (i) or
larger average cluster size.
5 RESULTS
The simulation results represent the performance of
each algorithm across various wireless transmission
range values (0-300 meters) and maximum vehicle
speed (40-140 kilometers/hour) with a fixed
maximum cluster size of 50 vehicles. In addition,
the simulation time duration was held constant
across all tests. To minimise traffic flow variability
between simulations and enable repeatable test
results, the randomised features of the model were
seeded with the same value at each simulation run.
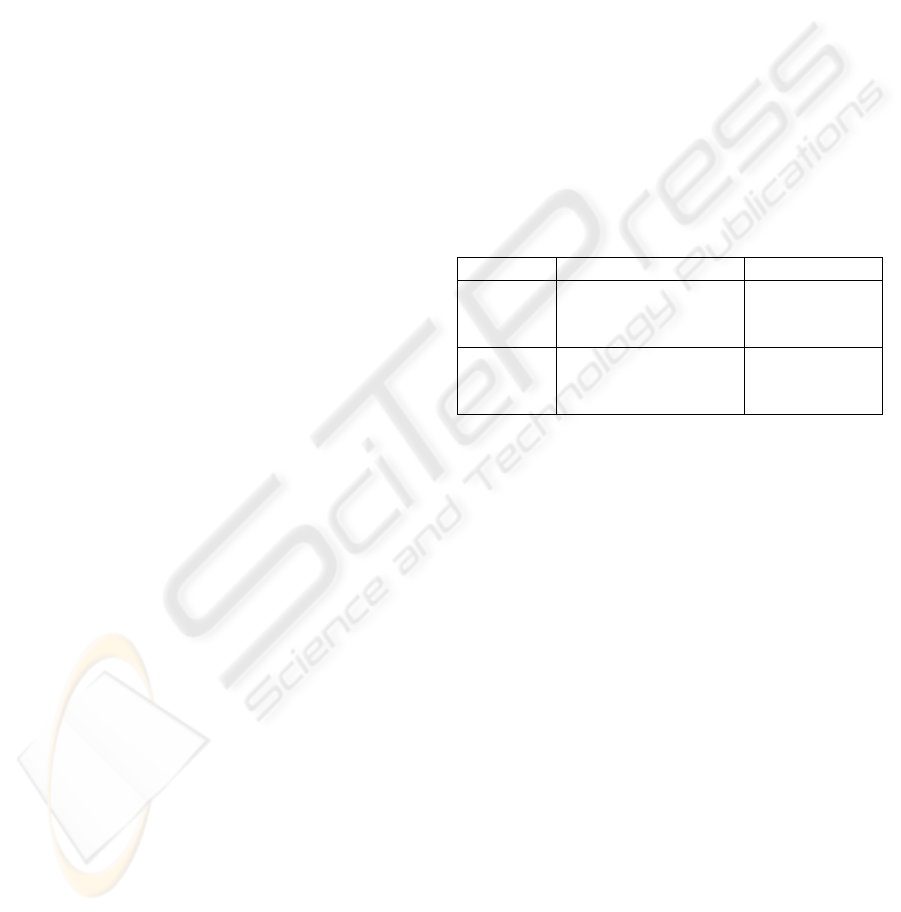
Figure 2 summarises the variation of the average
number of clusters with respect to the transmission
range. It illustrates the performance of all six
algorithms for a reasonably standard traffic flow
environment with a fixed maximum speed of
100km/h. Notably, the Lowest-ID and Closest
Position to Average algorithms show rapid initial
increase of cluster head changes as a result of
transmission range increase. These algorithms
quickly converge, however, in line with the uniform
distribution of the randomly generated ID values and
vehicles in the Intelligent Driver Model,
respectively. For small transmission ranges, most
ICINCO 2005 - ROBOTICS AND AUTOMATION
228
vehicles remain out of each other’s transmission
range. This leads to a severely disconnected
network. For the other four algorithms, the
likelihood of change in either of the metrics as a
result of increased transmission range results in a
steady increase in the number of clusters with
transmission range. The Lowest-ID algorithm
clearly performs better that the other five algorithms
and shows a convergence to a stable cluster count.
The Highest-Degree, Closest Velocity to Average,
and Closest Acceleration to Average algorithms
show almost equivalent performance characteristics.
Finally, the Closest Position to Average and Closest
Velocity algorithms show similar performance; a
result of common traffic patterns wherein similarly
Figure 2: Cluster Changes vs. Transmission Range.
0
0.1
0.2
0.3
0.4
0.5
0.6
25 50 100 150 200 250 300
T ransmission Range (met ers)
Avg Clusterhead Changes per time step
Highest-Degree
Lowes t-ID
ClosestVelocity
ClosestPositionToAvg
ClosestVelocityToAvg
ClosestAccelerationToAvg
Figure 2: Cluster Changes vs. Transmission Range.
Figure 3: Average Cluster Change vs. Speed Limit
0
0.1
0.2
0.3
0.4
0.5
0.6
40 80 100 120 140
Max Speed (km/h)
Avg Clusterdead Changes
Highest-Degree
Lowes t -ID
ClosestVelocity
ClosestPositionToAvg
ClosestVelocityToAvg
ClosestAccelerationToAvg
Figure 3: Average Cluster Change vs Speed Limit
AN INTELLIGENT VEHICLE APPROACH TO MOBILE VEHICULAR AD HOC NETWORKS - Clustering
Optimisation in Dynamic Traffic Networks
229
located vehicles are more likely to share similar
velocities.
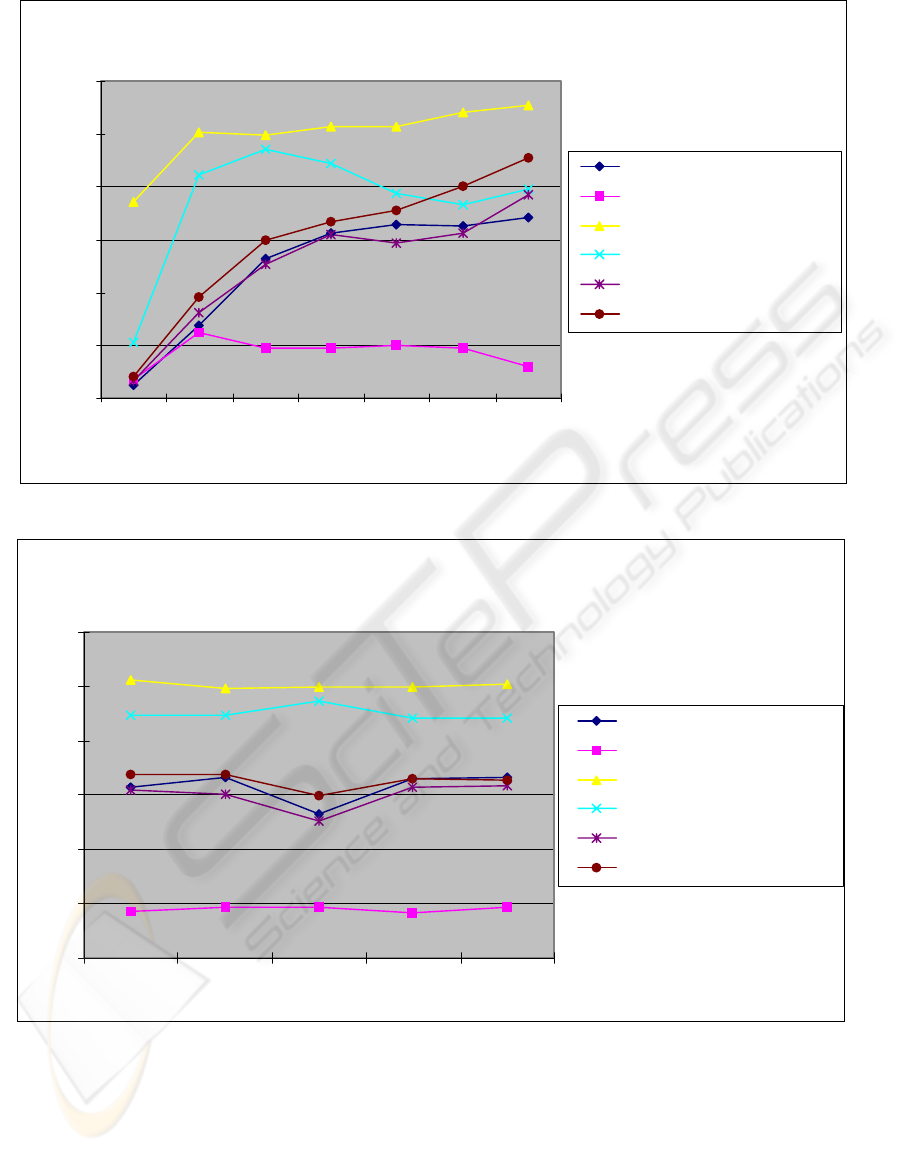
Figure 3 shows the effect of varying the
maximum speed on the average number of cluster
head changes with a fixed transmission range of
150m. Algorithm performance is consistent with
those of Figure 2. Speed limits are only useful only
in heavy-traffic situations (Treiber, 2000).
Figure 4 displays the performance of all but the
Lowest ID algorithm over various transmission
ranges. Higher curves indicate better overall
performance. Highest-Degree, Closest Velocity to
Average, and Closest Acceleration to Average again
show similar performance and better overall results
than the Closest Position to Average or Closest
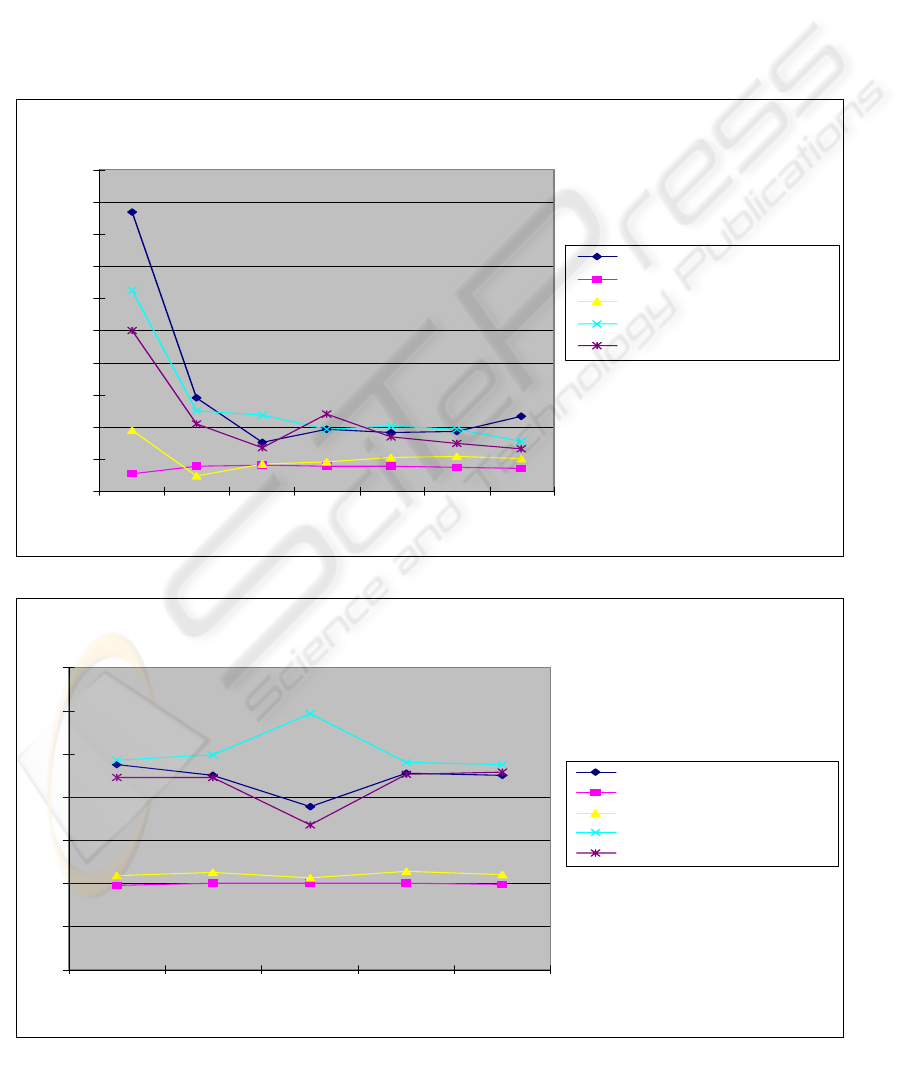
Velocity. Figure 5 shows the overall performance
across various speed limits for this same algorithm
subset. Note that the Closest Velocity to Average
algorithm outperforms the Highest-Degree and
Closest Acceleration to Average as the maximum
speed nears 100km/h. At this speed, the overall
traffic flow performs optimally without any noise
(traffic slowdown or bottleneck).
6 CONCLUSION
The analysis performed in this research highlights
Figure 5: Clustering Ratio vs. Speed Limit
0
2
4
6
8
10
12
14
40 80 100 120 140
M ax Sp eed (km/h)
AvgSize/AvgHeadChang
e
H ig h e s t-D e g re e
ClosestVelocity
ClosestPositionToAvg
ClosestVelocityToAvg
ClosestA ccelerationToA vg
Figure 5: Clustering Ratio vs Speed Limit.
Figure 4: Clustering Ratio vs. Transmission Rang
e
0
5
10
15
20
25
30
35
40
45
50
25 50 100 150 200 250 300
Transmission Range (meters)
Avg Size/Avg Head Change
s
Highest-Degree
ClosestVelocity
ClosestPositionToAvg
ClosestVelocityToAvg
ClosestAccelerationToA vg
Figure 4: Clustering Ratio vs. Transmission Range.
ICINCO 2005 - ROBOTICS AND AUTOMATION
230

the performance of the Lowest-ID clustering
algorithms as optimal for the constrained MANET
environment provides by VANETs. As in MANET
studies, the Lowest-ID provides a stable cluster
topology over long time durations due to its nature
as an unbiased, uniformly distributed clustering
methodology.
Comparable in performance to the well-known
Highest-Degree algorithm, this research presented
the Closest Velocity to Average and Closest
Acceleration to Average algorithms. These
algorithms provided fairly stable clusters. Stability,
however, degraded as transmission range increased.
The Closest Velocity and Closest Position to
Average algorithms were also discussed in detail.
These algorithms showed somewhat stable
performance but were prone to cluster head changes.
One final note on the clustering implementation
is that each clustering step was performed using a
pure re-cluster. In other words, no previous state
information was reviewed prior to choosing the
cluster head. Additionally, no priority was given to
local nodes already assigned leadership during the
same cluster step. It is believed that cluster
performance can be greatly improved by performing
biased clustering in the utility function, i.e. give
priority to those nodes chosen as the cluster head in
either a previous clustering step or during the same
clustering step. These methods fall into the category
of compound clustering algorithms which were out
of the scope of this analysis.
7 FUTURE WORK
The results of this research provide an initial
approach to analysing parameterised VANET
dynamics from a traffic micro-simulation
perspective. The simulation results presented within
this paper represent a highly constrained traffic
simulation environment. Future studies should
apply the method of this research to larger scale
traffic micro-simulation environments under more
dynamic traffic situations.
In addition to the modelling of larger traffic
models using utility-based clustering, research
should be directed at the maximisation of network
communication within the VANET network in
relation to different clustering algorithms.
Multi-parameter utility functions also provide
another path for future discovery. VANETs are not
generally prone to the same problems that led to
compound clustering methods in MANETs.
Therefore a traffic-specific approach is needed to
handle these in VANETs.
REFERENCES
Sivavakeesar, S and Pavlou, G, 2002. A Prediction-Based
Clustering Algorithm to Achieve Quality of Service in
Multihop Ad Hoc Networks, London Communication
Symposium.
Basagni, S., 1999. Distributed Clustering for Ad Hoc
Networks, Proceedings of the 1999 International
Symposium on Parallel Architectures, Algorithms and
Networks (I-SPAN'99), IEEE Computer Society,
pp.310-315, Australia, Jun 23-25,1999.
Basagni, S., Chlamtac, I., Farago, A., 1997. A Generalized
Clustering Algorithm for Peer-to-Peer Networks,
Workshop on Algorithmic Aspects of Communication,
satellite workshop of ICALP'97, invited paper,
Bologna, Italy, Jul 11-12, 1997.
Gerla, M. and Tsai, J., 1995. Multicluster, Mobile,
Multimedia Radio Network, Wireless Networks, 1(3)
1995, pp. 255-265.
Ephremides, A., Wieselthier, J.E., Baker, D.J., 1987. A
Design Concept for Reliable Mobile Radio Networks
with Frequency Hopping Signaling, Proceedings of
the IEEE, Vol. 75, No. 1, January 1987, pp. 56_73.
Jiang, M., Li, J., and Tay, Y.C., 1999. Cluster Based
Routing Protocol, IETF Draft, August 1999. Work in
Progress.
Amis, A., and Prakash. R., 2000. Load-Balancing
Clusters in Wireless Ad Hoc Networks. In
Proceedings 3rd IEEE Symposium on Application-
Specific Systems and Software Engineering
Technology, pages 25–32 Mar. 24–25 2000.
Krishna, P., Vaidya, N.H., Chatterjee, M., Pradhan, D.K.,
1997. A Cluster Based Approach for Routing in Ad
Hoc Networks, ACM Computer Communications
Review (CCR), 1997.
Ramanathan, R. and Steenstrup, M, 1998. Hierarchically-
Organized Multihop Mobile Networks for Quality-of-
Service Support, Mobile Networks and Applications,
Vol. 3, No. 2, August 1998.
Treiber, M., 2005. vwisb7.vkw.tu-dresden.de/~treiber
Treiber, M., Hennecke, A., and Helbing, D., 2000.
Congested Traffic States in Empirical Observations
and Microscopic Simulations, Physical Review E 62,
1805 2000.
Garg M. and Shyamasundar, R.K., 2004. A Distributed
Clustering Framework in Mobile Ad Hoc Networks
Bettstetter, C., and Konig, S., 2002. On the Message and
Time Complexity of a Distributed Mobility Adaptive
Clustering Algorithm in Wireless Ad Hoc Networks,
Proceedings of the Fourth European Wireless
Conference.
Basu, P., Khan, N., and Little, T., 2001. A Mobility Based
Metric for Clustering in Mobile Ad Hoc Networks.
Johansson, T. and Carr-Motyckova, L., 2004. Bandwidth-
constrained Clustering in Ad Hoc Networks.
AN INTELLIGENT VEHICLE APPROACH TO MOBILE VEHICULAR AD HOC NETWORKS - Clustering
Optimisation in Dynamic Traffic Networks
231
