A SWITCHING ALGORITHM FOR TRACKING EXTENDED
TARGETS
Andreas Kr
¨
außling, Frank E. Schneider and Dennis Wildermuth
FGAN – Research Institute for Communications, Information Processing and Ergonomics
Neuenahrer Straße 20, 53343 Wachtberg–Werthhoven, Germany
Keywords:
Tracking, Kalman filter, Viterbi algorithm, crossing targets.
Abstract:
Tracking extended objects like humans in crowded environments is one of the challenges in mobile robotics.
Several characteristics must be taken into consideration when evaluating the performance of such a tracking
algorithm — e.g. accuracy, the need for computation time and the ability to deal with complex situations
like crossing targets. In this paper two different algorithms for tracking extended targets are examined and
compared by means of these criterions. One result is that none of the algorithms alone is a sufficient solution
to the criterias. Therefore, a switching approach using both algorithms is introduced and tested on real data.
1 INTRODUCTION AND
RELATED WORK
One aspect in mobile robotics is the assistance of hu-
mans in order to accomplish a task (e.g. support el-
derly people). A precondition for this usage is that the
robot is able to follow the human partner. Therefore,
it is necessary that the robot has the ability to estimate
the current position of the human. This problem can
be analysed under the superordinate concept of track-
ing. Tracking denotes the estimation of the position
of an object based on consecutive sensor measure-
ments. It is well studied in the field of aerial surveil-
lance with radar devices (Bar-Shalom and Fortmann,
1988). In the area of mobile robots tracking is also a
well established research topic (Prassler et al., 1999),
(Schulz et al., 2001), (Fod et al., 2002) and (Fuer-
stenberg et al., 2002). In mobile robotics laser range
scanners are one of the preferred sensor devices. A
Sick laser range scanner for example can measure the
distance to the next reflecting obstacle with a high
angle resolution of e.g. 0.25 degree. Lasers have
rapidly gained popularity for mobile robotic applica-
tions such as collision avoidance, navigation, local-
ization and map building in the recent years (Thrun,
1998), (Thrun et al., 1999).
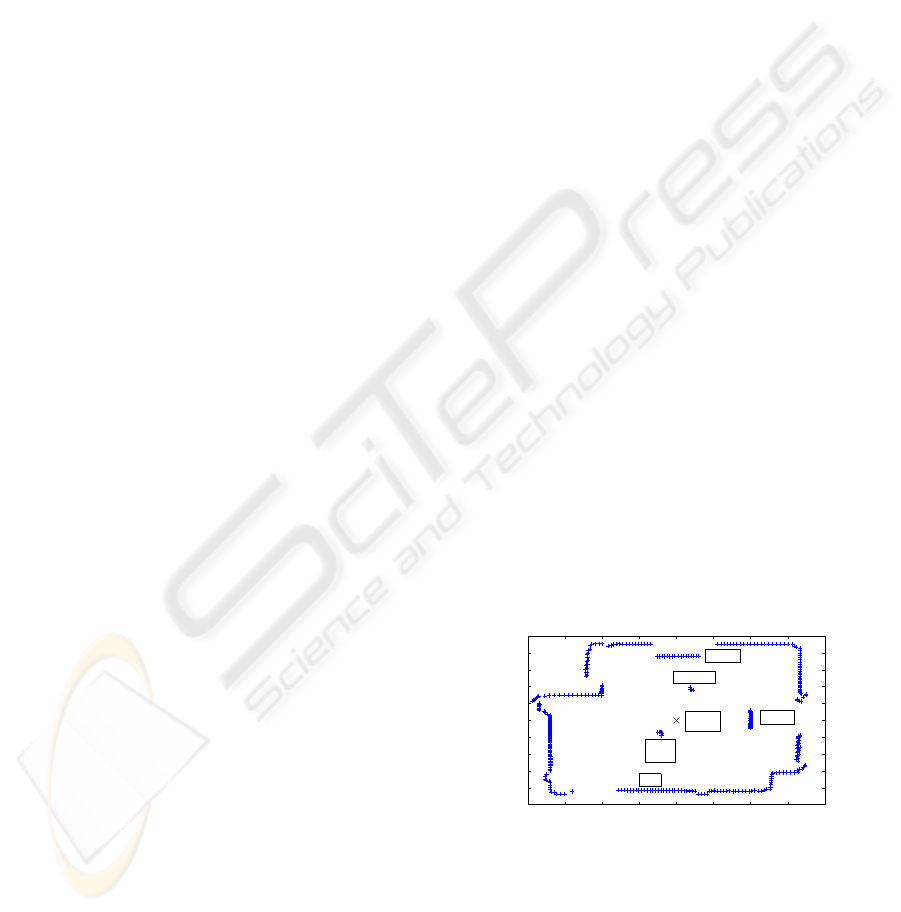
The problem of tracking people and other objects in
densely populated environments with a robot–borne
laser scanner can be characterized in the following
way: most of the readings are from obstacles like
walls or other objects and only a few measurements
come from the tracked object itself. This fact is illus-
trated in figure 1. It shows the measurements of one
scan in a real system in our laboratory. In the scenario
the observing robot, at which two Sick lasers with a
180 degree field of view each are mounted back to
back, is located in the centre with coordinates (0, 0).
There are two humans in the field of view of the ro-
bot. Furthermore, there are two wall–like obstacles.
Most of the measurements originate from the walls
of the laboratory. The problem of allocation of data
−800 −600 −400 −200 0 200 400 600 800
−1000
−800
−600
−400
−200
0
200
400
600
800
1000
second
person
first person
observing
robot
obstacle
obstacle
wall
Figure 1: Measurements of one scan.
obtained from the presently accounted target is called
the data association problem (Bar-Shalom and Fort-
mann, 1988). As a solution to this problem, a tracking
algorithm might use a validation gate which separates
the signals belonging to the current target from other
signals. A second characteristic of tracking people
126
Kräußling A., E. Schneider F. and Wildermuth D. (2005).
A SWITCHING ALGORITHM FOR TRACKING EXTENDED TARGETS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 126-133
DOI: 10.5220/0001173601260133
Copyright
c
SciTePress

with laser range scanners is the occurrence of several
measurements from the same object. In contrast to
common radar based tracking sensors the Sick laser
scanner has a much higher resolution and refresh rate.
This leads to the fact that the tracked object gener-
ates several measurements. Therefore, we have to
deal with what we call extended objects instead of
punctiform objects like in the common radar track-
ing literature. Thereby, punctiform targets are those
ones, which are just origin of one measurement. A
third characteristic of tracking in the field of mobile
robotics is the occurrence of crossing targets. This
means that two targets get very close to each other,
so that they cannot be separated by common tracking
algorithms (Fortmann et al., 1983), (Kr
¨
außling et al.,
2004b). This situation can appear e.g. when two hu-
mans meet, talk to each other and split again and is
a well known problem in mobile robotics (Prassler
et al., 1999).
In section 2 we introduce two algorithms which
can deal with tracking extended objects as long as
they are not crossing. The first algorithm just makes
use of the Kalman filter (Kalman, 1960), whereas
the second one also is based on the Viterbi algorithm
(Viterbi, 1967). The application of the Kalman fil-
ter has a long tradition in mobile robotics (Crowley,
1989), (Leonard and Durrant-Whyte, 1992) and (Dis-
sanayake et al., 2001). Additionally, the underlying
models for the dynamics and the observation process
of the object are proposed and the details of the val-
idation gate are given. In section 3 the results of the
comparison of the accuracy and the computation com-
plexity of the algorithms are summarized. The com-
parison of different algorithms is a well introduced
issue in mobile robotics (Gutmann et al., 1998) and
(Gutmann and Fox, 2002). In section 4 the perfor-
mance of the algorithms under the condition of cross-
ing targets is studied and it is shown, that none of
the algorithms can handle this situation sufficiently.
Therefore an improved algorithm based on the Viterbi
algorithm is introduced. In section 5 a new hybrid
or switching algorithm, which is the main contribu-
tion of this work, is proposed as a possible solution of
the tracking problem in mobile robotics. It uses the
improved algorithm only when a crossing occurs and
otherwise it just uses a simple Kalman filter. The per-
formance of the switching algorithm is tested on real
data in detail. Finally, in section 6 the summary and
an outlook on future work are given.
2 THE MATHEMATICAL
BACKGROUD OF THE
ALGORITHMS
2.1 The model
The dynamics of the object to be observed and the
observation process itself are modeled by a hidden
Gauß–Markov chain with the equations
x
k
= Ax
k−1
+ w
k−1
(1)
and
z
k
= Bx
k
+ v
k
. (2)
Thereby x
k
is the object state vector at time k, A is the
state transition matrix, z
k
is the observation vector at
time k and B is the observation matrix. Furthermore,
w
k
and v
k
are supposed to be uncorrelated zero mean
white Gaussian noises with covariances Q and R.
Since the motion of a target in the plane has to be
described a two dimensional kinematic model is used.
Therefore, it is
x
k
= (
x
k1
x
k2
˙x
k1
˙x
k2
)
⊤
(3)
with x
k1
and x
k2
the Cartesian coordinates of the tar-
get and ˙x
k1
and ˙x
k2
the corresponding velocities. z
k
gives just the Cartesian coordinates of the target. For
the coordinates the equation of a movement with con-
stant velocity is holding, i.e. it is
x
k+1,j
= x
kj
+ ∆T ˙x
kj
. (4)
Thereby ∆T is the time interval between two consec-
utive measurements. For the progression of the veloc-
ities we the equation
˙x
k+1,j
= e
−∆T/Θ
˙x
kj
+ Σ
p
1 − e
−2∆T/Θ
u(k) (5)
from (van Keuk, 1971) with the zero mean white
Gaussian noise u(k) with E[u(m)u(n)
⊤
] = δ
mn
.
Thus the velocity is supposed to decline exponen-
tially. The term
Σ
p
1 − e
−2∆T/Θ
u(k) (6)
models the process noise and the accelerations. For
the details of the resulting matrices A, B, Q and R
we refer to (Kr
¨
außling et al., 2005).
2.2 The validation gate
The validation gate is realised using the Kalman filter.
The Kalman filter calculates a prediction y(k + 1|k)
for the measurements z
k+1,l
from the actually han-
dled target at time step k + 1 via the formula
y(k + 1|k) = B · A · x(k|k). (7)
A SWITCHING ALGORITHM FOR TRACKING EXTENDED TARGETS
127

Thereby x(k|k) is the estimate for the position of the
target at time step k. For every sensor reading z
k+1,l
of the time step k+1 (l = 1, . . . 360) the Mahalanobis
distance λ (Mahalanobis, 1936) with
λ = (z
k+1,l
− y(k + 1|k))
⊤
· [S(k + 1)]
−1
·
·(z
k+1,l
− y(k + 1|k)) (8)
is computed. Then all measurements with λ >
λ
max
with a given treshold λ
max
are excluded. See
(Bar-Shalom and Fortmann, 1988) for further details.
Thereby the matrix S(k+1) is the innovations covari-
ance from the Kalman filter. In common filter appli-
cations this matrix is calculated from the predictions
covariance P (k + 1|k) with the equation
S(k + 1) = BP (k + 1|k)B
⊤
+ R (9)
with the given covariance matrix R of the measure-
ment noise. The predictions covariance is derived
from the equation
P (k + 1|k) = AP (k|k)A
⊤
+ Q. (10)
But for tracking extended objects this approach is not
sufficient, since there is an additional influence of the
extendedness of the object to the deviation of the mea-
surements from the prediction y(k+1|k). To take care
of this feature an accessory positive definite matrix E
should be added in equation 9. Because the lateral di-
mension of people usually shows a radius in the range
of 30 cm, the entries of E should be in the range of
900. Thus, after some optimization process we used
E =
780 0
0 780
(11)
and
S(k + 1) = BP (k + 1|k)B
⊤
+ R + E. (12)
Thereby the values of the entries of the matrix E
vastly exceed the values of the entries of the matrix
R, so that the main contribution in equation 12 comes
from the matrix E. Of course, a more elaborated
model of the target shape like in (Guivant and Nebot,
2001), (Taylor and Kleeman, 2004) or in (Zhao and
Shibasaki, 2005) could be used. These authors have
developed models for walking, modeling the move-
ment of the two legs of a person explicitly. Thereby
they make use of the fact that the laser scanners are
usually mounted at the height of the legs. We have
rejected such an approach because of the computa-
tional burden aligned with these approaches. More-
over looking at the actual data we get from the laser
scanners we found that its hard to separate the legs
of the persons in most of the scans. Finally, as one
of the references has already mentioned, the situation
can get very complex when there are crossing targets
(Taylor and Kleeman, 2004). This can result in a dra-
matic increase of the number of hypothesis used for
the modeling of the walking persons.
One characteristic of the model proposed in this pa-
per consists of the fact, that the sequence {K
k
}
∞
k=1
of
the Kalman gains (please note equation 15 for a de-
finition) converges very rapidly to a limit. Thus the
calculations of the matrices K
k
can be omitted and
instead it is sufficient to calculate and use the limit
K = lim
k→∞
K
k
. This limit can be calculated quite
easily, similar to the case of the α–β–filter described
in (Ekstrand, 1983) or (Kalata, 1984). These facts can
be exploited for the development of a tracking algo-
rithm for real time applications.
2.3 The Kalman filter algorithm
with equal weights
This algorithm first calculates an unweighted mean
z
k+1
of the m
k+1
measurements {z
k+1,l
}
m
k+1
l=1
, that
have been selected by the gate, i.e. it is
z
k+1
=
1
m
k+1
m
k+1
X
l=1
z
k+1,l
. (13)
This mean is used as the input for the updating equa-
tion of the Kalman filter, i.e. it is
x(k+1|k+1) = x(k+1|k)+K
k+1
(z
k+1
−y(k+1|k))
(14)
with the predictions x(k + 1|k) = Ax(k|k) and
y(k + 1|k) and the Kalman gain K
k+1
derived from
the Kalman filter via the formula
K
k+1
= P (k + 1|k)B
⊤
[S(k + 1)]
−1
(15)
or as supposed above by using the limit K of the se-
quence {K
k
}
∞
k=1
. The covariances are then updated
with the equation
P (k+1|k+1) = P (k+1|k)−K
k+1
S(k+1)[K
k+1
]
⊤
.
(16)
Finally, the estimates x(k + 1|k + 1) are further im-
proved by the use of the Kalman smoother (Shumway
and Stoffer, 2000).
2.4 The Viterbi based algorithm
The Viterbi algorithm has been introduced in (Viterbi,
1967). A good description is also given in (Forney Jr.,
1973). It has been recommended for tracking puncti-
form targets in clutter in (Quach and Farooq, 1994)
and for tracking extended targets in (Kr
¨
außling et al.,
2004a).
Whereas the Kalman filter algorithm (KFA) uses all
measurements in the validation gate as an unweighted
mean, the Viterbi based algorithm (VBA) calculates a
separate estimate x(k + 1|k + 1)
i
for every selected
measurement z
k+1,i
with i = 1, . . . , m
k+1
. There-
fore it uses a directed graph. The nodes of this graph
are the measurements in the validation gates or the
ICINCO 2005 - ROBOTICS AND AUTOMATION
128
selected measurements. Given the selected measure-
ments
˜
Z
k
= {z
k,j
}
m
k
j=1
at time step k the selected
measurements for the time step k + 1 are determined
as follows: for every selected measurement z
k,j
the
prediction y(k + 1|k)
j
is calculated based on the esti-
mate x(k|k)
j
. Then the corresponding validation gate
is applied to the measurements of time k + 1. This
results in a set
˜
Z
k+1,j
of measurements which have
passed the particular validation gate for the measure-
ment z
k,j
successfully. The set
˜
Z
k+1
of selected mea-
surements at time k + 1 is then just the union of these
sets, i.e.
˜
Z
k+1
= ∪
j
˜
Z
k+1,j
. (17)
a
k+1,j,i
, the distance between the nodes z
k,j
and
z
k+1,i
, is calculated using the formula
a
k+1,j,i
=
1
2
ν
⊤
k+1,j,i
[S
k+1
]
−1
ν
k+1,j,i
+
+ ln
p
|2πS
k+1
|
. (18)
Thereby ν
k+1,j,i
is the innovation defined as
ν
k+1,j,i
= z
k+1,i
− y(k + 1|k)
j
. (19)
S
k+1
and y(k + 1|k)
j
are the innovation covariance
respectively the previously defined prediction evalu-
ated by the Kalman filter, based on the nodes Z
k,j
=
{z
l,i(l,j)
}
k
l=1
belonging to the path ending in z
k,j
.
Thereby, the set Z
k,j
is called the tracking history be-
longing to the node z
k,j
(see below). The predecessor
of the node z
k+1,i
is that node z
k,j
which minimises
the length d
k,j
+ a
k+1,j,i
of the corresponding path in
the graph. For this purpose only those measurements
z
k,j
whose gates have been passed by z
k+1,i
success-
fully are considered (Pulford and Scala, 1995). The
corresponding index is referred to as j(k, i). The
length d
k+1,i
of the path ending in z
k+1,i
is then
received as d
k,j(k,i)
+ a
k,j(k,i),i
. Thus by a recur-
sive algorithm for every selected measurement at time
k + 1 the tracking history Z
k+1,i
is determined. Next,
a Kalman filter is applied to calculate an estimate
x(k + 1|k + 1)
i
for the measurement z
k+1,i
using the
prediction y(k + 1|k)
j(k,i)
as the input in formula 14.
For further details of the algorithm please see refer-
ences (Kr
¨
außling et al., 2004a) and (Kr
¨
außling et al.,
2004b). Finally, when the last scan is reached, the
tracking history with the shortest length of the path
is chosen and the corresponding estimates are used
as the estimates for the state and the position respec-
tively of the object. As in the case of the KFA, these
estimates are further improved by use of the Kalman
smoother.
3 EVALUATION OF THE
ALGORITHMS
Unfortunately, a detailed evaluation of the algorithms
with respect to accuracy and need for computation
time is beyond the scope of a conference paper. So
we would like to point out just the main results gained
from simulated data: the KFA outmatches the VBA
in terms of both criterions. For the comparison of
the algorithms we used simulated data of an exem-
plary problem. Thereby, a circular object with radius
27 cm moves on a circle with radius d around the ob-
serving robot. The radius d has been varied from 1 m
to 8 m and the standard deviation of the laser mea-
surements has been varied from 1 cm to 10 cm. Simu-
lated data have been used, because we needed to know
the true position of the target very accurately, a goal
which is hard to achieve using data from a real ex-
periment. This case has already been mentioned by
other authors (Zhao and Shibasaki, 2005). The val-
ues used for the distance and the standard deviation of
the measurement noise are typical for real objects ob-
served with a Sick laser. The values for the distance
between the estimated position and the true position
of the object are in the range of 1 cm for the KFA,
whereas they are in the range of 20 cm for the VBA.
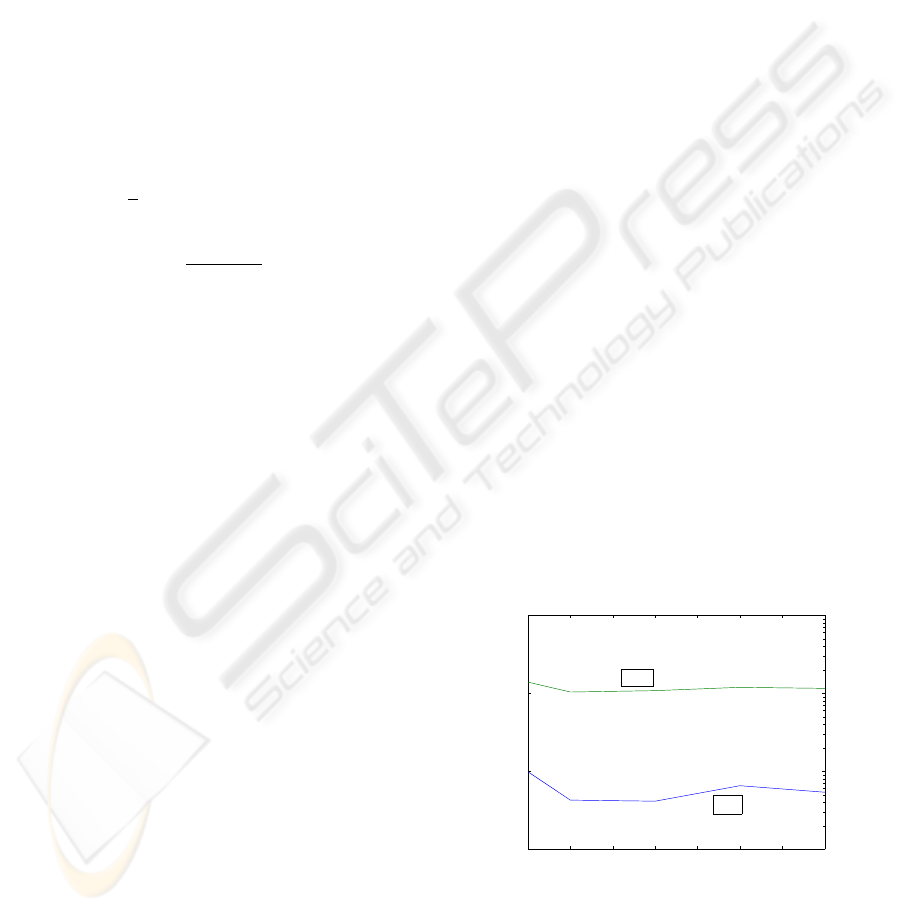
The computing time needed for one computation step
of the KFA is approximately 20 ms, whereas it is in
the range from 70 ms to 1.5 s for the VBA depending
on the distance of the observed object. Figures 2 and
3 show the results for the standard deviation of 5 cm
of the laser measurements. The results for the other
standard deviations are similar. Please note the loga-
rithmic scaling of the ordinates. Further details are
100 200 300 400 500 600 700 800
10
−1
10
0
10
1
10
2
radius d in cm
distance in cm
distance from the true position
VBA
KFA
Figure 2: Comparison of the distances from the true posi-
tion.
given in a technical report published by the authors
(Kr
¨
außling et al., 2005).
A SWITCHING ALGORITHM FOR TRACKING EXTENDED TARGETS
129
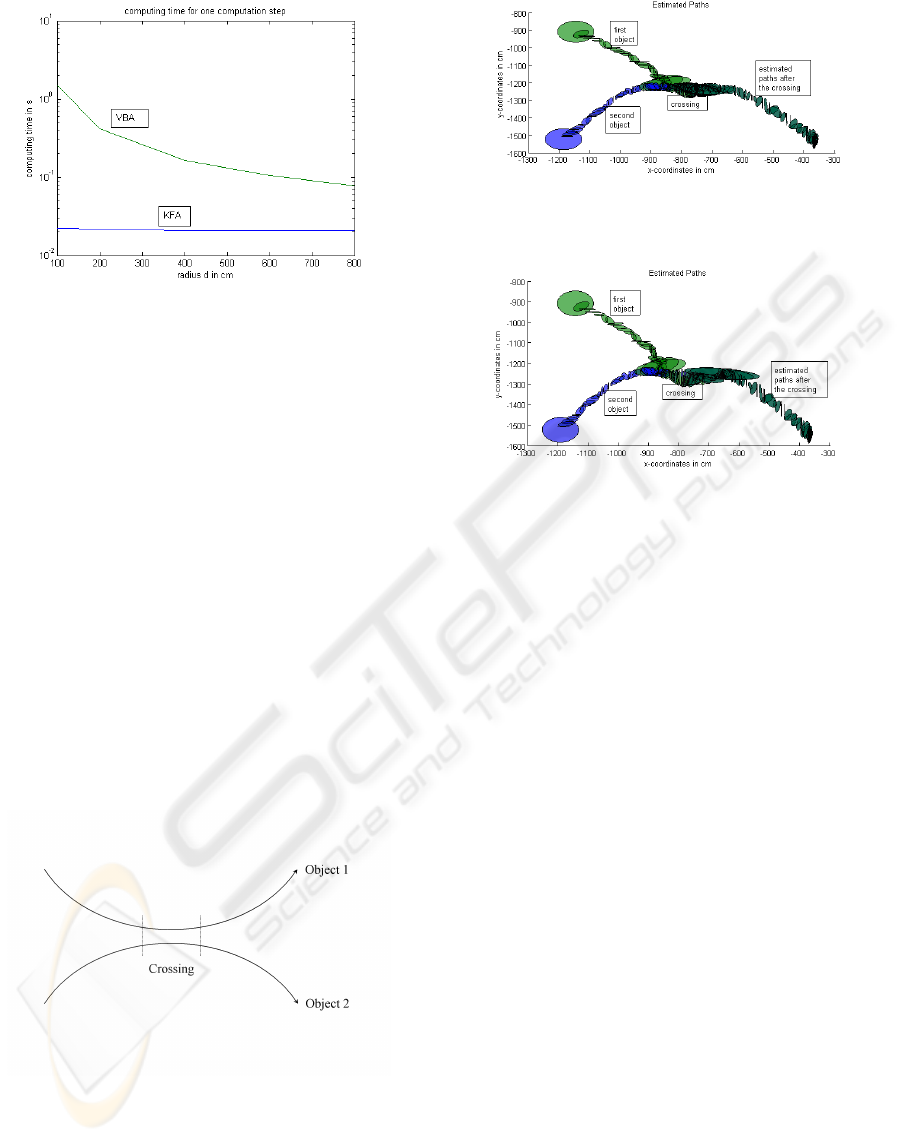
Figure 3: Comparison of the computing time.
4 THE PROBLEM OF CROSSING
TARGETS
The crossing of two targets means that the validation
gates of two targets intersect, i.e. some measurements
are lying in the validation gates of both of the two
targets. Figure 4 shows a typical situation.
Figures 5 and 6 show the behaviour of the two in-
troduced algorithms when being applied to the prob-
lem of crossing targets using real data originating
from an experiment with two walking persons in our
laboratory. They show the estimates for the position
of the objects calculated by the two algorithms by use
of ellipses. Thereby the estimated position is the cen-
tre of the ellipse, whereas the shape of the ellipse rep-
resents the actual geometry of the tracked object. The
objects start in the left and move to the right as indi-
cated in figure 4.
Figure 4: Two crossing objects.
Obviously none of the algorithms can deal with the
problem of crossing targets. They all locate both ob-
jects at the same position after the crossing. This
behaviour is common to other algorithms for track-
ing extended targets developed so far by our research
Figure 5: Application of the KFA to crossing targets, real
data.
Figure 6: Application of the VBA to crossing targets, real
data.
group, for instance an EM (Expectation Maximisa-
tion) based algorithm (Stannus et al., 2004). Thus,
we have developed an improved algorithm based on
the VBA that can deal with the problem of crossing
targets (Kr
¨
außling et al., 2004a). It uses the fact, that
the VBA is able to cope with multimodal densities to
some degree. This feature is due to the fact, that the
VBA calculates separate validation gates and state re-
spectively position estimates for every selected mea-
surement. The handling of multimodal densities is a
characteristic that the VBA algorithm has in common
with the SJPDAF algorithm (Schulz et al., 2001). But
while this algorithm uses particle filtering (Gordon
et al., 1993), (Pitt and Shephard, 1997) and thus has to
deal with several hundreds of particles, the Viterbi al-
gorithm only handles a few points or state estimates.
Additionally, these points contain some information
about the geometry of the tracked object as proposed
in (Kr
¨
außling et al., 2004a). When a crossing between
two targets occurs the VBA shows the following be-
haviour: as soon as the crossing takes place the al-
gorithm tracks all points originated from both objects
simultanously. When the crossing is over, these points
are again separated into two distinct clusters of points
and these clusters are still tracked simultaneously for
both objects. Only the assignment of the clusters to
the objects is wrong, since in most cases one cluster
is associated to both objects by the VBA algorithm at
the end of the tracking process like in figure 6. Our
new approach is based on these observations. It uses
the results of the VBA and furthermore performs the
ICINCO 2005 - ROBOTICS AND AUTOMATION
130
following three distinct steps:
1. At every time step k for every pair of targets it is
tested, if a crossing has started to take place. This
is supposed to be the case when at least one mea-
surement lies in the validation gates of both of the
two objects.
2. Once a crossing between two objects has been de-
tected, at each following time step it is examined
wether the crossing has finished, which means that
there are two separated clusters.
3. As soon as the end of the crossing has been ob-
served the two associated clusters are assigned to
the two corresponding targets.
The three steps are carried out based on geometrical
considerations and can be viewed under the super-
ordinate concept of data mining (Han and Kamber,
2001). Finally, like for the VBA at the end of the
tracking process for each object the path with the min-
imum length is determined and a Kalman smoother is
applied. This improved algorithm is called Cluster
Sorting Viterbi Shortest Path Algorithm (CSVSPA).
For further details see (Kr
¨
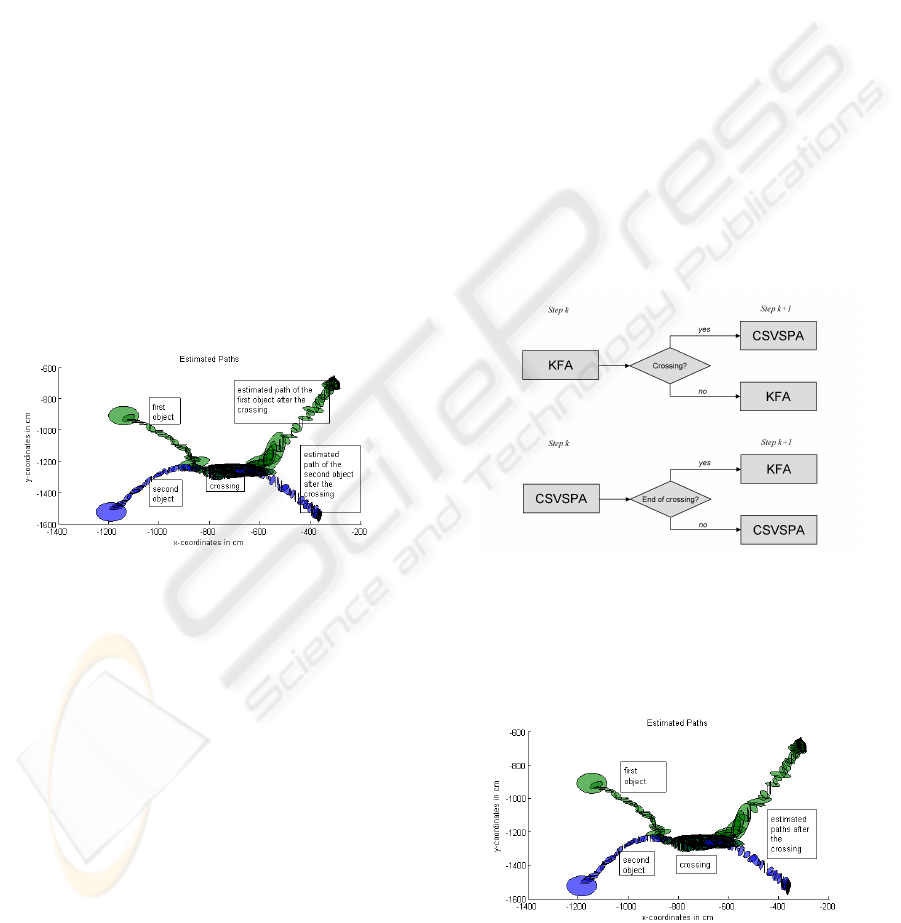
außling et al., 2004b). Fig-
ure 7 shows the application of the CSVSPA to the pre-
viously used data.
Figure 7: Crossing targets, handled by the CSVSPA, real
data.
Of course it could be argued that there are already
well established algorithms for tracking crossing tar-
gets like the JPDAF (Fortmann et al., 1983) or the
Multiple Hypothesis Filter (Reid, 1979). But these
algorithms have been developed for tracking puncti-
form targets in clutter and probably will fail when
tracking extended targets. There might be several
measurements from the same extended target. Thus
two different measurements from the same target can
be associated with the two targets. But the exclusion
of the association of measurements from the same tar-
get to both objects is the essential core of these two
algorithms. Thus they will fail to separate the two tar-
gets after the crossing in most of the cases, especially
when an additional occlusion takes place. In most of
the cases the two tracks will coincide after the cross-
ing like for the VBA in figure 6. Moreover the compu-
tational burden for applying these algorithms is very
high when applied to extended targets, since these ob-
jects can be the origin of up to ten measurements.
5 A NEW SWITCHING
ALGORITHM
Since the CSVSPA is able to deal with crossing tar-
gets it could, of course, be used for the whole track-
ing process. But since this algorithm is based on the
VBA algorithm it is not as accurate as the KFA as
long as no crossing takes place and needs much more
computation time. Therefore, we developed a new
switching or hybrid algorithm (SA), which uses the
CSVSPA only when a crossing takes place. For the
rest of the time it uses the very accurate and fast KFA.
This choice is also motivated by the fact, that the KFA
is faster and more accurate than other algorithms de-
veloped by our research group for tracking extended
objects (Kr
¨
außling et al., 2005). Thereby, crossings
are detected as in the case of the CSVSPA. Figure 8
shows the flowchart of the SA.
Figure 8: Flowchart of the new switching algorithm.
Figure 10 shows that the SA can deal with crossing
targets as well as the CSVSPA using the data from
the last section. To illustrate the power of the SA fur-
Figure 9: Crossing targets, handled by the new switching
algorithm, real data.
ther experiments with real data have been carried out.
A SWITCHING ALGORITHM FOR TRACKING EXTENDED TARGETS
131
Thereby two humans were walking around in our lab-
oratory. The measurements were recorded with two
SICK lasers each of them with a 180 degree field of
view mounted on a mobile robot. The evaluation of
the algorithms was performed by means of five sim-
ilar scenarios. In each scenario two persons walked
separately for some time interval t
1
at the beginning
of the experiment. Then the persons met each other
and walked together for some time interval t
2
, so that
a crossing took place. Finally, the persons split again
and walked alone for the time interval t
3
. Thereby,
the time interval t
2
was arranged to be approximately
30 seconds for each scenario. Furthermore, the time
intervals t
1
and t
3
were of same length for each run
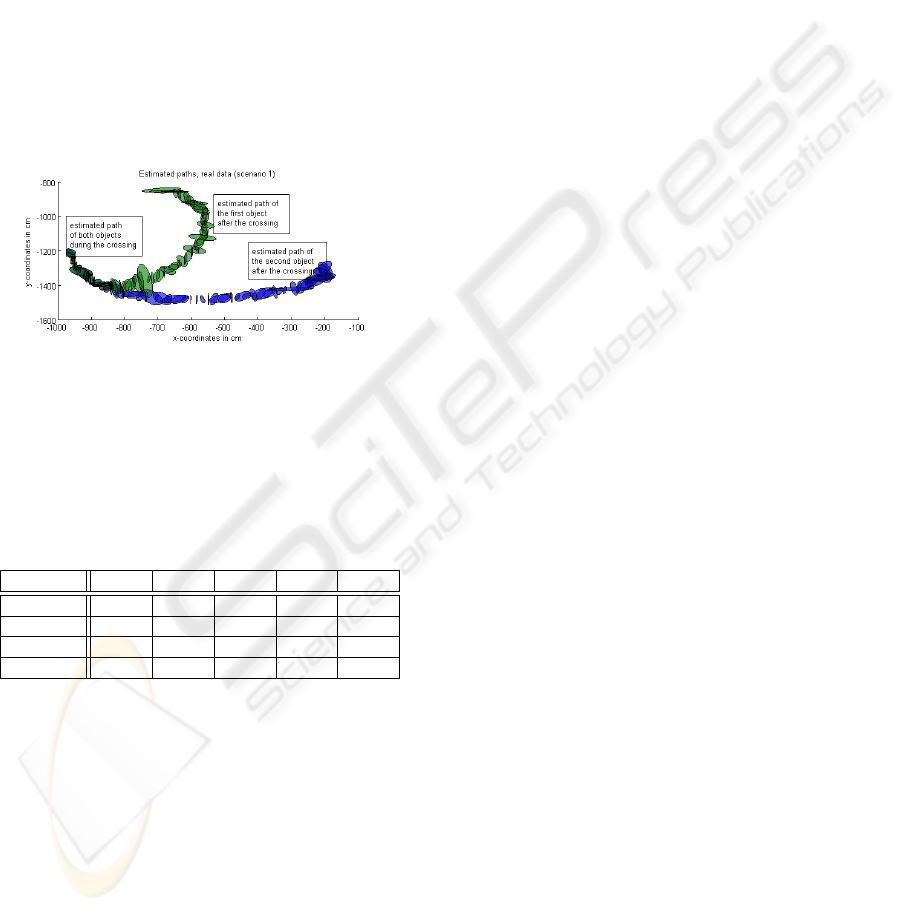
varying from 30 seconds to 150 seconds. Figure 11
shows an example of the results for the estimated
paths using the SA. Like in section 4 KFA and VBA
Figure 10: Crossing targets, real data of scenario 1, handled
by the new SA.
always failed, whereas CSVSPA and SA behaved well
for all five scenarios.
Table 1 describes the results for the needed com-
puting time. It contains the average time t
a
needed
for the calculations of one time step in milliseconds.
Table 1: Average Computing Time
scenario 1 2 3 4 5
KFA 54.1 53.8 54.6 53.9 54.4
VBA 379.0 355.7 478.6 366.3 469.3
CSVSPA 294.3 258.6 329.5 260.7 320.3
HA 171.3 123.7 119.2 110.8 91.5
The table shows the improvement that can be
achieved using the SA in comparison to the CSVSPA.
Moreover, with growing intervals t
1
and t
3
the gain
increases rapidly.
6 CONCLUSIONS
In this paper we have addressed the problem of track-
ing extended targets. Two basic algorithms for the
tracking process have been introduced: they are either
just using the Kalman filter (KFA) or additionally the
Viterbi algorithm (VBA). The comparison of the al-
gorithms has shown that the KFA is much faster and
much more accurate than the VBA. Thereafter, the
problem of two crossing targets has been introduced.
It has been shown that both algorithms produce in-
sufficient results under the constraints of crossing tar-
gets. Thus an enhancement of the VBA in form of
the CSVSPA has been proposed, which can deal with
crossing targets. But since the CSVSPA is based on
the VBA and thus is imprecise and slow, we finally
developed the SA, which makes use of the CSVSPA
only when a crossing has been detected and otherwise
uses the KFA. The power of the SA has been demon-
strated on real data. Thereby, it has been shown,
that the SA can handle crossing targets as well as the
CSVSPA but needs much less computing time.
In the future we will try to generalise our method
for tracking crossing objects from the case of two ob-
jects to n objects (multi target tracking). Furthermore,
the SA should be compared to the well established al-
gorithms like the SJPDAF (Schulz et al., 2001). Fi-
nally, the calculation of the Kalman gains should be
substituted by the calculation of the limit as men-
tioned above to make the algorithm useable in real
time applications.
REFERENCES
Bar-Shalom, Y. and Fortmann, T. (1988). Tracking and
Data Association. Academic Press.
Crowley, J. L. (1989). Control of translation and rotation in
a robot vehicle. IEEE Iros–II, Tsukuba, Japan.
Dissanayake, G. M. W. M., Newman, P., Clark, S., Durrant-
Whyte, H., and Csorba, M. (2001). A solution to
the simultaneous localization and map building (slam)
problem. IEEE Transactions on Robotics and Au-
tomation, 17:229–241.
Ekstrand, B. (1983). Analytical steady state solution for
a kalman tracking filter. IEEE Trans. Aerospace and
Electronic Systems, AES–19:815–819.
Fod, A., Howard, A., and Mataric, M. J. (2002). Laser–
based people tracking. In Proceedings of the IEEE
Intl. Conf. on Robotics and Automation, pages 3024–
3029.
Forney Jr., G.-D. (1973). The viterbi algorithm. Proceed-
ings of the IEEE, 61(3):268–278.
Fortmann, T. E., Bar-Shalom, Y., and Scheffe, M. (1983).
Sonar tracking of multiple targets using joint prob-
abilistic data association. IEEE Journal of Oceanic
Engineering, OE–8(3).
Fuerstenberg, K. C., Linzmeier, D. T., and Dietmayer, K.
C. J. (2002). Pedestrian recognition and tracking of
vehicles using a vehicle based multilayer laserscan-
ner. In Proceedings of IV 2002, Intelligent Vehicles
Symposium, volume 1, pages 31–35.
Gordon, N., Salmond, D., and Smith, A. (1993). A novel
approach to nonlinear/non–gaussian bayesian state es-
timation. IEE Proceedings F, 140:107–113.
ICINCO 2005 - ROBOTICS AND AUTOMATION
132

Guivant, J. and Nebot, E. (2001). Navigation in large out-
door unstructured environments. International Sym-
posium of Robotics Research.
Gutmann, J.-S., Burgard, W., Fox, D., and Konolige, K.
(1998). An experimental comparison of localization
methods. In International Conference on Intelligent
Robots and Systems (IROS 1998), Victoria, Canada.
Gutmann, J.-S. and Fox, D. (2002). An experimental com-
parison of localisation methods continued. In Pro-
ceedings of the IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS 2002), Lau-
sanne, Switzerland.
Han, J. and Kamber, M. (2001). Data Mining. Academic
Press, London.
Kalata, P. R. (1984). The tracking index: A general-
ized parameter for alpha–beta–gamma target trackers.
IEEE Trans. Aerospace and Electronic Systems, AES–
20:174–182.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Trans. ASME, J. Basic En-
gineering, 82:34–45.
Kr
¨
außling, A., Schneider, F. E., and Wildermuth, D.
(2004a). Tracking expanded objects using the viterbi
algorithm. In Proceedings of the IEEE Conference on
Intelligent systems, Varna, Bulgaria.
Kr
¨
außling, A., Schneider, F. E., and Wildermuth, D.
(2004b). Tracking of extended crossing objects us-
ing the viterbi algorithm. In Proceedings of the 1st
International Conference on Informatics in Control,
Automation and Robotics (ICINCO).
Kr
¨
außling, A., Schneider, F. E., and Wildermuth, D. (2005).
Zur verfolgung ausgedehnter ziele — eine
¨
ubersicht
¨
uber ausgew
¨
ahlte algorithmen und ein vergleich deren
g
¨
ute. Technical report, FKIE/FGAN, Wachtberg, Ger-
many.
Leonard, J. J. and Durrant-Whyte, H. F. (1992). Directed
Sonar Sensing for Mobile Robot Navigation. Kluwer
Academic Publishers.
Mahalanobis, P. C. (1936). On the generalized distance in
statistics. Proceedings of the National Institute of Sci-
ence, 12:49–55.
Pitt, M. and Shephard, N. (1997). Filtering via simulation:
auxiliary particle filters. Journal of the American Sta-
tistical Association.
Prassler, E., Scholz, J., and Elfes, E. (1999). Tracking peo-
ple in a railway station during rush–hour. In Chris-
tensen, H. I., editor, Computer Vision Systems, vol-
ume 1542, pages 162–179. Springer, lecture notes in
computer science edition.
Pulford, G. W. and Scala, B. L. (1995). Over–the–horizon
radar tracking algorithm using the viterbi algorithm
— third report to high frequency radar division. Tech-
nical Report 27/95, Cooperative Research Centre for
Sensor Signal and Information Processing, University
of Melbourne.
Quach, T. and Farooq, M. (1994). Maximum likelihhod
track formation with the viterbi algorithm. In Pro-
ceedings of the 33rd Conference on Decision and
Control, Lake Buena Vista, Florida.
Reid, D. B. (1979). An algorithm for tracking multiple tar-
gets. IEEE Trans. Automatic Control, AC–24:843–
854.
Schulz, D., Burgard, W., Fox, D., and Cremers, A. B.
(2001). Tracking multiple moving objects with a mo-
bile robot. In Proceedings of the 2001 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR 2001).
Shumway, R. H. and Stoffer, D. S. (2000). Time Series
Analysis and Its Applications. Springer.
Stannus, W., Koch, W., and Kr
¨
außling, A. (2004). On
robot–borne extended object tracking using the em al-
gorithm. In Proceedings of the 5th Symposium on In-
telligent Autonomous Vehicles, Lisbon, Portugal.
Taylor, G. and Kleeman, L. (2004). A multiple hypothesis
walking person tracker with switched dynamic model.
In Proceedings of the Australasian Conference on Ro-
botics and Automation, Canberra, Australia.
Thrun, S. (1998). Learning metric-topological maps for in-
door mobile robot navigation. Artificial Intelligence,
99(1):21–71.
Thrun, S., Fox, D., and Burgard, W. (1999). Markov lo-
calization for mobile robots in dynamic environments.
Journal of Artificial Intelligence Research, 11:391–
427.
van Keuk, G. (1971). Zielverfolgung nach kalman–
anwendung auf elektronisches radar. Technical Report
173, Forschungsinstitut f
¨
ur Funk und Mathematik,
Wachtberg–Werthhoven, Germany.
Viterbi, A. J. (1967). Error bounds for convolutional codes
and an asymptotically optimum decoding algorithm.
IEEE Transactions On Information Theory, IT–13(2).
Zhao, H. and Shibasaki, R. (2005). A novel system
for tracking pedestrians using multiple single–row
laser–range scanners. IEEE Transactions on Systems,
Man and Cybernetics—Part A: Systems and Humans,
35(2):283–291.
A SWITCHING ALGORITHM FOR TRACKING EXTENDED TARGETS
133
