
AN IMAGE PROCESSING ALGORITHM
Saving valuable time in a sequence of frames analysis
E. Karvelas, D. Doussis and K. Hrissagis
Zenon S.A., Kanari 5, 15354 Glyka Nera, Greece
Keywords: image processing, motion detection.
Abstract: This paper describes a new algorithm to detect moving objects in a dynamic scene based on statistical
analysis of the greyscale variations on a sequence of frames which have been taken in a time period. The
main goal of the algorithm is to identify changes (e.g. motion) while coping with variations on
environmental changing conditions without being necessary to perform a prior training procedure. In this
way, we use a pixel level comparison of subsequent frames in order to deal with temporal stability and fast
changes. In addition, this method computes the temporal changes in the video sequence by incorporating
statistical results and it is less sensitive to noise. The algorithm’s goal is not to detect motion but rather to
filter out similar frames in a sequence of frames, thus making it a valuable tool for those who would like to
evaluate and analyze visual information obtained from a captured video frames. Finally, experimental
results and a performance measure establishing the confidence of the method are presented.
1 DESCRIPTION OF THE
ALGORITHM
The developed algorithm identifies those grayscale
frames with different content form the immediate
previous ones in a sequence of frames. The
algorithm has been tested with video frames with
rate 1 frame/ second.
The algorithm marks every frame as hidden or
shown. After M frames there is a number of
shown
M
frames marked as shown and a number of
hidden
M
frames marked as hidden, where
hiddenshown
M
M
M
+=
. The
shown
M
frames
include the
shown
True
M as the correctly marked frames
and the
shown
False
M as mistakenly marked ones. Thus,
we have the following equation
shown
False
shown
True
shown
MMM += . The same apply to
the hidden frames, i.e.
hidden
False
hidden
True
hidden
MMM += .
The algorithm assigns different significance to
the
hidden
False
M ,
hidden
False
M frames. In particular, it is
allowable for the algorithm to show frames which
should be hidden while it is not acceptable to hide
frames which should be shown. This algorithm is
useful in projects in which it is desirable to eliminate
the
hidden
False
M frames while it is acceptable to keep the
shown
False
M frames. The
shown
False
M frames although are
not critically important, they affect the efficiency of
the image processing.
In the implementation of the algorithm we used
videos with the frame rates of 1 frame/ second. In
order to test the algorithm we used the following
different sets of captured frames:
– Set A: It included frames, which exhibit no
motion and no difference in the light
condition.
– Set B: It included frames, which exhibit
differences in less than 10% of their contents
and no difference in the light condition.
– Set C: It included frames, which exhibit
differences in more than 10% of their
contents and no difference in the light
condition.
– Set D: It included frames, which exhibit no
motion and difference due to illumination
variance.
The developed algorithm has two stages of
image analysis. During the first stage the algorithm
searches for differences between the two frames on a
pixel level and marks blocks of
99× pixels that
have significant changes.
232
Karvelas E., Doussis D. and Hrissagis K. (2005).
AN IMAGE PROCESSING ALGORITHM - Saving valuable time in a sequence of frames analysis.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 232-236
DOI: 10.5220/0001170502320236
Copyright
c
SciTePress

During the second stage the algorithm uses the
patterns of differences, which were found in the first
stage in order to decide if it will show or hide the
frame.
1.1 First Stage Analysis
In order to eliminate the noise the algorithm
converts the frame from the initial array of
wh×
11×
pixel in an array of
(
)
(
)
3
3
wh
×
33×
pixel .
The grayscale value of the
33×
pixel of the
j
i
,
position (where i is the row and j is the column) is
given by:
∑∑
+=
−=
+=
−=
××
=
1
1
1
1
1133
in
in
jm
jm
nmij
pixelpixel , where
nm
pixel
11×
is
the grayscale value of the original pixel at
m
n
,
position.
Thus, during the first stage of the image analysis the
algorithm divides the two compared frames to form
a grid
(
)
(
)
9
9
wh
×
which is consisted of areas of
3x3
33×
pixel .
The corresponding areas between the two
consecutive frames are compared as shown in the
following equations so that the differences between
them, which are not attributed to illumination
variations, can be quantized. For each set of
compared frames we have the following variables:
eSecondFram
in
in
jm
jm
ij
ij
FirstFrame
in
in
jm
jm
ij
ij
normal
pixel
pixel
pixel
pixel
D
ij
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
∑∑
∑∑
+=
−=
+=
−=
×
×
+=
−=
+=
−=
×
×
1
1
1
1
33
33
1
1
1
1
33
33
eSecondFram
in
in
jm
jm
ij
ij
FirstFrame
in
in
jm
jm
ij
ij
negative
pixelS
pixelS
pixelS
pixelS
D
ij
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
=
∑∑
∑∑
+=
−=
+=
−=
×
×
+=
−=
+=
−=
×
×
1
1
1
1
33max
33max
1
1
1
1
33max
33max
)(
)(
)(
)(
The
max
S value is equal to the maximum value
which the variable
33×
pixel can take. Taking into
that an 8-bit grayscale video is used, this value is
equal to:
25533
max
××=S .
The values of the variable
ij
normal
D as well as the
ij
negative
D versus the value of a
[] []
2/)(
3333
33
eSecondFram
ij
FirstFrame
ij
ij
pixelpixelpixel
××
×
+≡
are shown in Figure 1 for set A frames and in Figure
2 for set B frames. The variable D
ij
is defined as
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
<
≥
≡
×
×
2
2
max
33
max
33
SpixelD
SpixelD
D
ij
ij
negative
ij
normal
ij
ij
Figure 1 and Figure 2 reveal that we can
differentiate between the set A and set B frames
when we compare the “bright” areas
(
2
max
33
Spixel
ij
≥
×
) and the negatives of the
dark” areas (
2
max
33
Spixel
ij
<
×
).
AN IMAGE PROCESSING ALGORITHM - Saving valuable time in a sequence of frames analysis
233
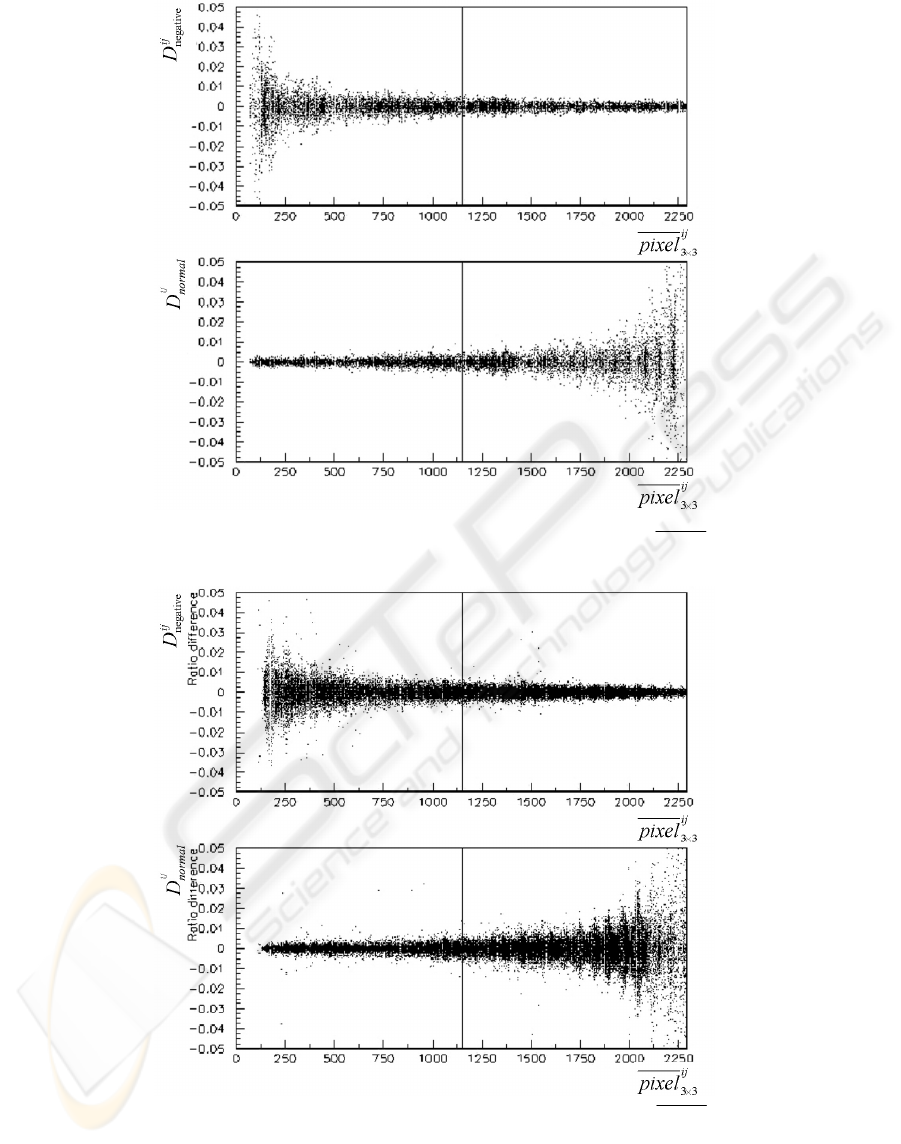
Figure 1: The values of the variable
ij
normal
D as well as the
ij
negative
D versus the value of a
ij
pixel
33×
for the set A frames
Figure 2: The values of the variable
ij
normal
D as well as the
ij
negative
D versus the value of a
ij
pixel
33×
for the set B frames
ICINCO 2005 - ROBOTICS AND AUTOMATION
234
1.2 Second Stage Analysis
Next a further analysis of the identified as
“different” areas is necessary in order to eliminate
the noise factor and identify human motion. In
particular every “different” area is analyzed by
taking into consideration the behaviour of its
surrounding areas. Thus, the notion of the “clusters”
is introduced. The concept of the clusters derives
from the fact that human motion presents a relatively
sizable motion. During the second stage of the visual
analysis not only the differences between the
compared frames is examined but also the relation of
these differences with the “neighbour” surrounding
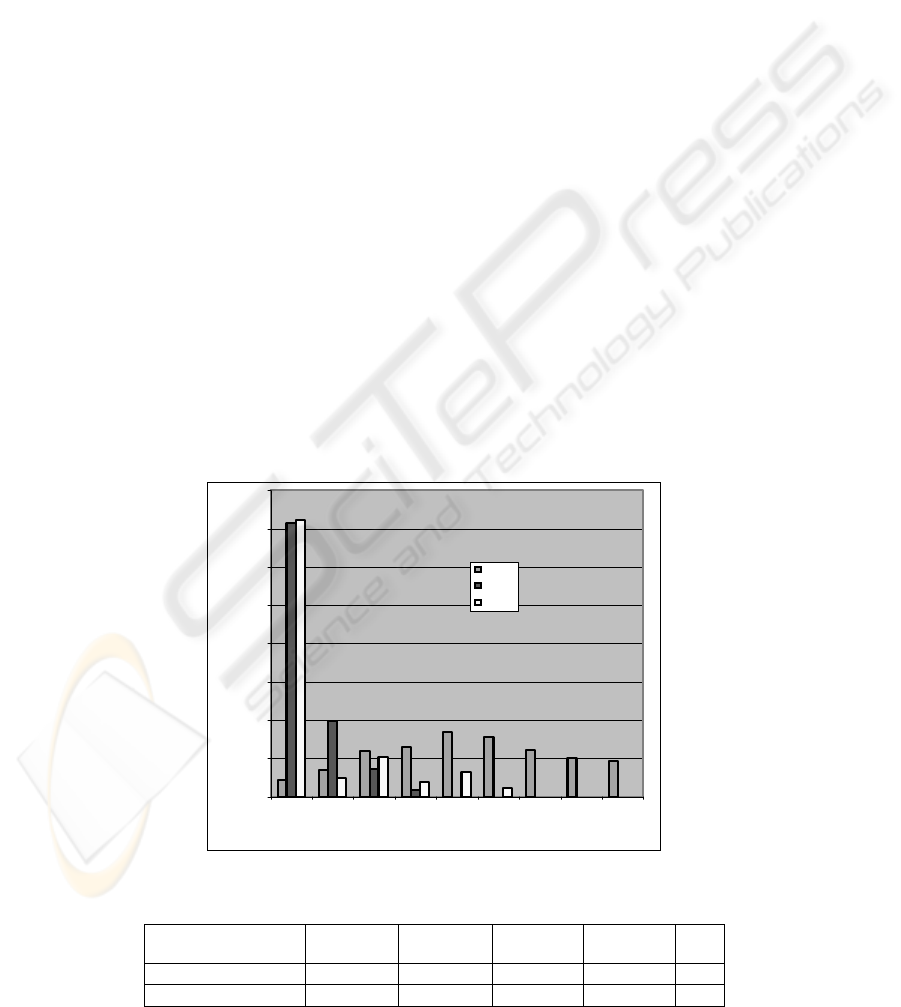
differences. In particular we statistically analyze the
clusters of differences which are formed. The size of
these clusters varies along with their distribution for
the four cases which we consider in this paper.
Analysis of the distribution results in the graph
shown in Figure 3.
As it is shown in Figure 3 we can distinguish
between the three cases of motion and ambient light.
These different distributions help us to establish
additional criteria for identifying human “motion” in
the sequence of frames which was our main target in
the study case analysis of the developed method.
1.3 Results
In order to test the algorithm we have used two
different sets of data. In the first one the data was
captured from 6 different cameras which were
placed inside a collapsing building. In the second set
the data was captured during building evacuation.
The results are shown in the Table 1.
2 CONCLUSION
Image processing has typically focused on only
accuracy or only speed. This algorithm represents a
good compromise between speed and accuracy. The
method is also very robust in presence of noise. It
yielded reasonable results for fairly low signal to
noise levels. In addition it does not require any
training procedure. The developed algorithm is a
valuable tool to the hands of those who want to
process a vast number of frames which have been
captured with a time difference of one second or
more and would like to focus only on those frames
which provide useful information
.
ACKNOWLEDGMENT
This study was partially funded by the European
Commission under the contract No IST-2000-29401-
Project LOCCATEC.
0,00
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
123456789
No of neighborhoods
Persentage
Set A
Set D
Set B
Figure 3: The distribution of the "motion" detection clusters
Table 1: The results of the implementation of the developed algorithm
LCD set
hidden
False
M
hidden
True
M
shown
False
M
shown
True
M
M
Collapsed building 0 509 3 120 632
Evacuated building 0 67 2 261 330
AN IMAGE PROCESSING ALGORITHM - Saving valuable time in a sequence of frames analysis
235

REFERENCES
LOCCATEC Low Cost Catastrophic Event Capturing, ,
Contract No IST-2000-29401
Y. Amit and A. Kong. Graphical templates for model
registration. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 18:225–236, 1996.
A. Blake and M. Isard. 3d position, attitude and shape
input using video tracking of hands and lips. In Proc.
ACM Siggraph, pages 185–192, 1994.
C. Bregler and J. Malik. Tracking people with twists and
exponential maps. In Proc. IEEE CVPR, pages 8–15,
1998.
C. Chow and C. Liu. Approximating discrete probability
distributions with dependence trees. IEEE
Transactions on Information Theory, 14:462–467,
1968.
T. Cover and J. Thomas. Elements of Information Theory.
John Wiley and Sons, 1991.
N. Friedman and M. Goldszmidt. Learning bayesian
networks from data. Technical report, AAAI 1998
Tutorial,
http://robotics.stanford.edu/people/nir/tutorial/, 1998.
D. Gavrila. The visual analysis of human movement: A
survey. Computer Vision and Image Understanding,
73:82–98, 1999.
L. Goncalves, E. D. Bernardo, E. Ursella, and P. Perona.
Monocular tracking of the human arm in 3d. In Proc.
5th Int. Conf. Computer Vision, pages 764–770,
Cambridge, Mass, June 1995.
I. Haritaoglu, D. Harwood, and L. Davis. Who, when,
where, what: A real time system for detecting and
tracking people. In Proceedings of the Third Face and
Gesture Recognition Conference, pages 222–227,
1998.
S. Ioffe and D. Forsyth. Human tracking with mixtures of
trees. In International Conference on Computer
Vision, pages 690–695, July 2001.
M. Jordan, editor. Learning in Graphical Models. MIT
Press, 1999.
M. Meila and M. Jordan. Learning with mixtures of trees.
Journal of Machine Learning Rearch, 1:1–48, 2000.
R. Polana and R. Nelson. Detecting activities. In
DARPA93, pages 569–574, 1993.
J. Rehg and T. Kanade. Digiteyes: Vision-based hand
tracking for human-computer interaction. In
Proceedings of the workshop on Motion of Non-Rigid
and Articulated Bodies, pages 16–24, November 1994.
K. Rohr. Incremental recognition of pedestrians from
image sequences. In Proc. IEEE Conf. Computer
Vision and Pattern Recognition, pages 8–13, New
York City, June, 1993.
Y. Song, X. Feng, and P. Perona. Towards detection of
human motion. In Proc. IEEE CVPR 2000, volume 1,
pages 810–817, June 2000.
Y. Song, L. Goncalves, E. D. Bernardo, and P. Perona.
Monocular perception of biological motion in
johansson displays. Computer Vision and Image
Understanding, 81:303–327, 2001.
C. Tomasi and T. Kanade. Detection and tracking of point
features. Tech. Rep. CMU-CS-91-132,Carnegie
Mellon University,1991.
S.Wachter and H.-H. Nagel. Tracking persons in
monocular image sequences. Computer Vision and
Image Understanding, 74:174–192, 1999.
M. Weber, M. Welling, and P. Perona. Unsupervised
learning of models for recognition. In Proc. ECCV,
volume 1, pages 18–32, June/July 2000.
Y. Yacoob and M. Black. Parameterized modeling and
recognition of activites. Computer Vision and Image
Understanding, 73:232–247, 1999.
Bock, P., The Emergence of Artificial Cognition: an
Introduction to Collective Learning, Singapore: World
Scientific, 1993
Bock, P., Klinnert, R., Kober, R., Rovner, R. and Schmidt,
H. “Gray Scale ALIAS”, IEEE Special Trans.
Knowledge and Data Eng., vol 4, no 2, Apr 1992
Haynes, S.M., and Jain, R. “Detection of Moving Edges,”
Computer Vision, Graphics and Image Processing, vol
21, no 3, Mar 1982
Horn, B.K.P., and Schunck, B.G. “Determining Optical
Flow,” Artificial Intelligence, vol 17, no 1-3, Aug
1981
Howard, C.G. and Kober, R. “Anomaly Detection in
Video Images”, Proceedings of the Fifth Neuro-Nimes
Conference: Neural Networks and their Applications,
Nimes, France, Nov 1992
Hubshman, J. and Achikian, M. “Detection of Targets in
Terrain Images with ALIAS”, Proc. Twenty-Third
Annual Pittsburgh Conf. on Modeling and Simulation,
Apr 1992
Kober, R., Bock, P., Howard, C., Klinnert R., and
Schmidt, H. (1992). “A Parallel Approach to Signal
Analysis”, Neural Network World, vol 2, no 6, Dec
1992
Nagel, H. “Displacement Vectors Derived from Second-
Order Intensity Variations in Image Sequences,”
Computer Vision, Graphics, and Image Processing,
vol 21, no 1, Jan 1983
Schalkoff, R.J., and McVey, E.S. “A Model and Tracking
Algorithm for a Class of Video Targets,” IEEE Trans.
on Pattern Analysis and Machine Intelligence, vol 4,
no 1, pps 2-10, Jan 1982
Schmidt, H., and Bock, P. “Traffic Jam Detection Using
ALISA”, Proc. of the IX Int. Symposium on Artificial
Intelligence, Nov 1996
ICINCO 2005 - ROBOTICS AND AUTOMATION
236
