
A FRAMEWORK FOR TELEPRESENT GAME-PLAY
IN LARGE VIRTUAL ENVIRONMENTS
Patrick R
¨
oßler, Frederik Beutler and Uwe D. Hanebeck
Intelligent Sensor-Actuator-Systems Laboratory
Institute of Computer Science and Engineering
Universit
¨
at Karlsruhe (TH)
Karlsruhe, Germany
Keywords:
Extended Range Telepresence, Motion Compression, Virtual Reality.
Abstract:
In this paper we present a framework that provides a novel interface to avatar control in immersive computer
games. The user’s motion is tracked and transferred to to the game environment. This motion data is used as
control input for the avatar. The game graphics are rendered according to the avatar’s motion and presented to
the user on a head-mounted display. As a result, the user immerses into the game environment and identifies
with the avatar. However, without further processing of the motion data, the virtual environment would be
limited to the size of the user’s real environment, which is not desirable. By using Motion Compression, the
framework allows exploring an arbitrarily large virtual environment while the user is actually moving in an
environment of limited size. Based on the proposed framework, two game applications were implemented, a
modification of a commercially available game and a custom designed game. These two applications prove,
that a telepresence system using Motion Compression is a highly intuitive interface to game control.
1 INTRODUCTION
Telepresence gives a human user the impression
of being present in another environment. This is
achieved by having a robot gather visual data of the
remote environment and present it to the user, who is
wearing a head-mounted display. The user thus per-
ceives the remote environment through the eyes of the
robot. In order to extend telepresence to an intuitive
user interface, the motion of the user’s head and hands
is tracked and transferred to the robot that replicates
this motion. As a result, the user identifies with the ro-
bot, i.e., he is telepresent in the remote environment.
Of course, this technique is also applicable to vir-
tual reality games, where the user controls an avatar
instead of a robot. Using telepresence as an input to
the computer, the user experiences a high degree of
immersion into the game’s virtual environment and
identifies fully with the avatar. Thus, telepresence
techniques provide an appropriate interface for intu-
itive avatar control.
Common input devices for avatar control like key-
boards, mice, joysticks, and game pads, all lack the
ability of controlling the avatar intuitively. A possible
approach for controlling an avatar in a game environ-
ment by means of immersive interfaces is Augmented
Reality. This approach is applied in the ARQuake
project (Piekarski and Thomas, 2002), where virtual
objects from the game are superimposed onto a real
environment. This system, however, only allows vir-
tual environments that feature the same layout as the
real environment.
CAVE Quake II (Rajlich, 2001) uses the CAVE En-
vironment (Cruz-Neira et al., 1993), where images are
projected onto walls of a box surrounding the user, in
order to provide a realistic impression of the first per-
son game Quake II to the user. The motion of a tool
called wand is tracked for avatar movement. Inter-
faces like this, however, are known for producing an
impression that resembles flying, rather than walking.
Other approaches use walking-in-place metaphors
(Slater et al., 1994) or complex mechanical setups
(Iwata, 1999), (Iwata et al., 2005) to allow free nat-
ural locomotion in virtual environments. However, it
is not known, that these systems feature the typical
user motion of computer games.
This paper presents a framework that combines im-
mersive computer games and extended range telep-
resence by means of Motion Compression (Nitzsche
et al., 2004). Motion Compression allows the user in
a confined user environment to control the avatar in
an arbitrarily large virtual world by natural walking.
150
Rößler P., Beutler F. and D. Hanebeck U. (2005).
A FRAMEWORK FOR TELEPRESENT GAME-PLAY IN LARGE VIRTUAL ENVIRONMENTS.
In Proceedings of the Second International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 150-155
DOI: 10.5220/0001165901500155
Copyright
c
SciTePress
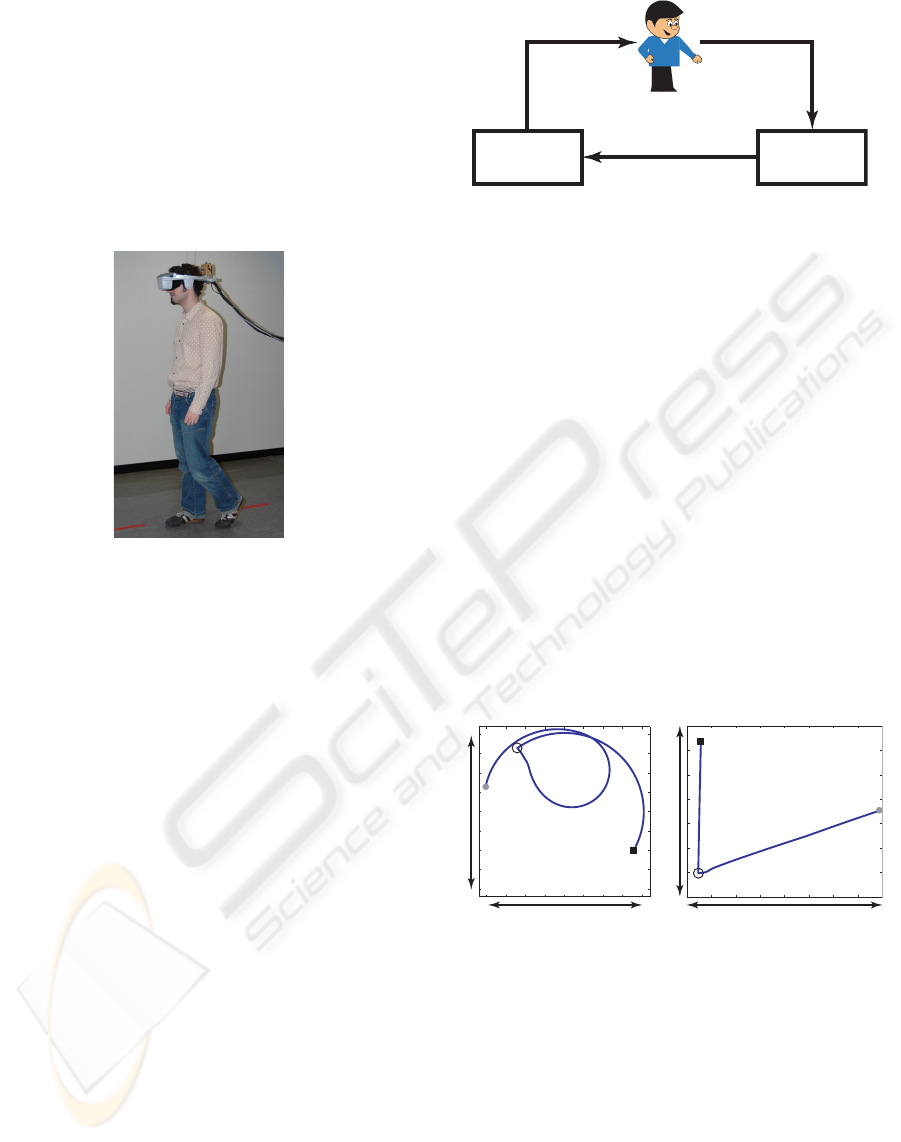
Fig. 1 shows a user wearing a non-transparent head-
mounted display while playing an immersive game.
According to several sources, (Peterson et al.,
1998), (Darken et al., 1999), and (Tarr and Warren,
2002), there is evidence, that using full body motion,
e.g. normal walking, results in better navigation in
the virtual environment than using common input de-
vices. By using the approach presented in this paper,
the user is expected to feel present in the virtual world
and identify well with the avatar under control.
Figure 1: User playing an immersive game with a telepres-
ence interface.
The remainder of this paper is structured as fol-
lows. Section 2 reviews Motion Compression, as it is
a major part of the proposed framework. An overview
on the framework is given in section 3. Section 4 de-
scribes the tracking system and section 5 presents two
different games that use this framework. An experi-
mental evaluation of the suitability for intuitive avatar
control is given in section 6. Finally, conclusions are
drawn in section 7.
2 MOTION COMPRESSION
The Motion Compression algorithm transforms the
user’s position and orientation in the user environ-
ment, i. e., the physical world surrounding the user,
into the target environment, which in this applica-
tion is the virtual environment of the game (Fig. 2).
The target environment is perceived visually by the
user wearing a non-transparent head-mounted dis-
play, which makes the physical world invisible for
him. The effect is that he moves in the user envi-
ronment but feels present in the virtual environment
instead.
The Motion Compression algorithm is partitioned
into three functional modules: path prediction, path
transformation, and user guidance.
motion
data
visual
perception
user
Motion
Compression
target
environment
user
environment
Figure 2: Overview of the different Motion Compression
environments.
The path prediction unit predicts the path the user
wants the avatar to follow in the target environment.
This prediction is based on the user’s view direction
and, if available, additional information on the target
environment. The resulting path is called target path.
Path transformation maps the target path onto the
user path in the user environment. Since the user en-
vironment is in most cases smaller than the target en-
vironment, the target path cannot always be mapped
directly. Motion Compression aims at giving users
a realistic impression of the virtual environment by
keeping distances and turning angles in the user envi-
ronment and target environment locally equal. Thus,
only the curvature of the path is changed. A possible
target path and the corresponding user path is illus-
trated in Fig. 3. To give the user a realistic impression
of controlling the avatar, the resulting curvature devi-
ation is kept at a minimum.
4 m
4 m
8 m
7 m
(a) (b)
user environment target environment
Figure 3: User path (a) and corresponding target path (b).
When walking, humans continuously check if they
are on the direct way to their desired target and adjust
their direction accordingly. This behavior is exploited
in user guidance. While moving along, the avatar’s
orientation in the target environment is changed in
such a way, that the user follows the path by correct-
ing the perceived deviations.
As a result of the three processing steps Motion
Compression provides a linear, but location-variant
transformation from the user’s position to the avatar’s
position in the target environment.
A FRAMEWORK FOR TELEPRESENT GAME-PLAY IN LARGE VIRTUAL ENVIRONMENTS
151
3 SOFTWARE FRAMEWORK
We designed a software framework, which allows
connecting arbitrary game environments to Motion
Compression control. This framework, however, is
not limited to game applications, but can also be used
for controlling teleoperators in telepresence scenar-
ios (R
¨
oßler et al., 2005). In order to provide an ex-
tensible interface that may be adapted to future ap-
plications, we decided to base the framework on the
well known CORBA middleware standard. Another
advantage of CORBA is, that it is platform indepen-
dent and available for virtually any programming lan-
guage.
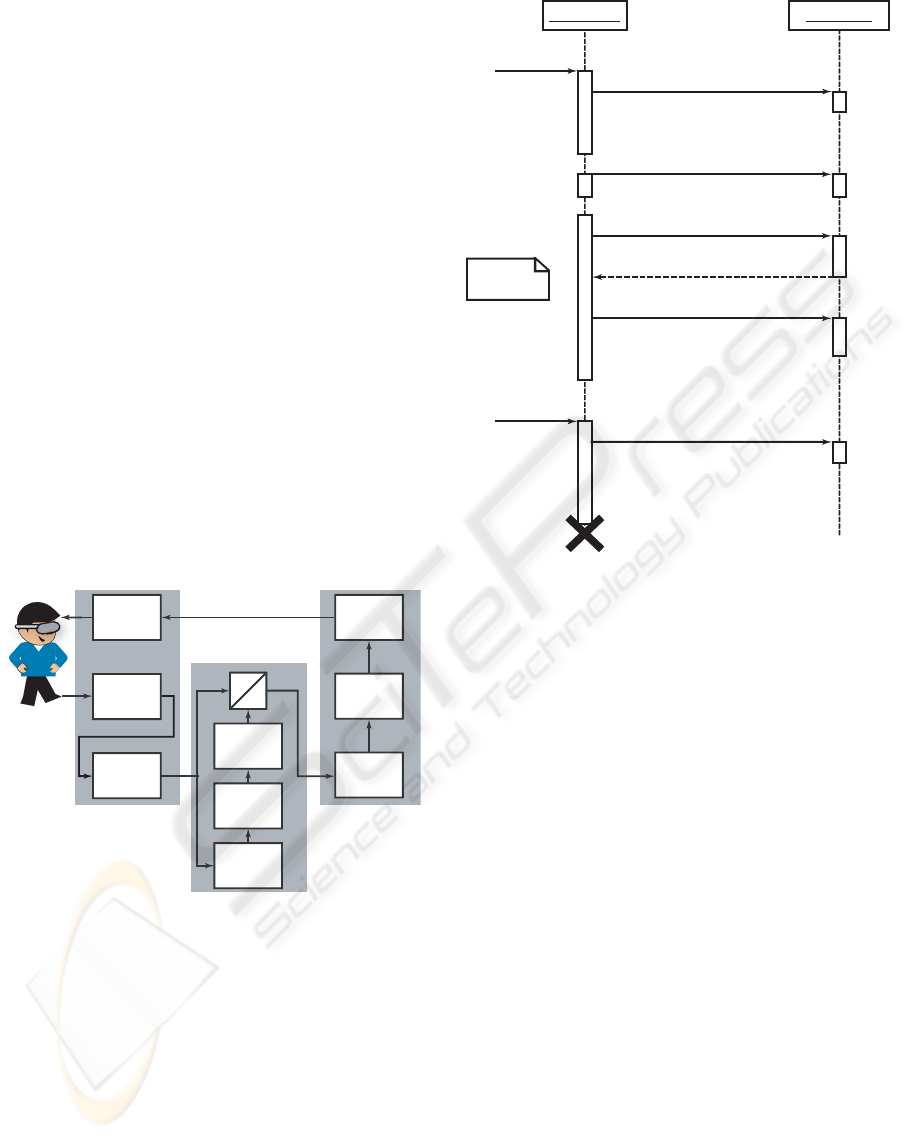
As shown in Fig. 4, the core of the setup is a
CORBA server, the MC Server, which contains an im-
plementation of the Motion Compression algorithm.
In order to provide an up-to-date target position, the
server runs asynchronously and constantly accepts
updates of the user position from the tracking sub-
system, which acts as a CORBA client. Based on
these position updates MC Server calculates the cur-
rent transformation and target position. The target
position is made available to be fetched by the game
client.
HMD
tracking
software
tracking
hardware
user interface
avatar
motion
video
rendering
game applicatio
n
game-
play
user
guidance
path
trans-
formation
path
prediction
U
T
MC Server
user
Figure 4: Data flow in the software framework.
The communication between the game application,
which is a CORBA client, and the MC Server requires
a data connection. This connection is established
when the game is started. During the game, the con-
nection is used to continuously refresh the target po-
sition and the avatar is moved accordingly. The con-
nection is maintained until the game is quit. The co-
operation of the game application and the MC Server
is illustrated in detail in Fig. 5. The game is also re-
sponsible for game-play and rendering the first per-
son view of the game-environment. These rendered
images are displayed to the user on a head-mounted
display.
Game Client MC Server
connect
target position
get position
acknowledge
start
stop
loop
disconnect
initalize
Figure 5: Collaboration of the game client and the MC
Server module.
4 TRACKING SYSTEM
For the estimation of the user’s posture, i. e., trans-
lation and orientation, an acoustic tracking system
is used. This system consists of four loudspeakers,
which are placed in the corners of the user environ-
ment, emitting distinct acoustic signals.
These signals are received by four microphones at-
tached to the head-mounted display. In order to es-
timate the time delay between sending and receiving
the signal, the cross correlation between the filtered
signal and the transmitted signal is calculated. The
estimated time delay is converted to the range based
on the velocity of sound.
Based on the arrangement of four loudspeakers and
four microphones 16 estimated ranges are available.
These range estimates are used in a gradient descent
algorithm to estimate the posture of the user’s head.
The initial values for the gradient descent algorithm
are calculated by means of a closed form solution pre-
sented in (Beutler and Hanebeck, 2005). The tracker
data is fused with information from a gyroscope cube
by means of a Kalman Filter, resulting in more accu-
rate estimates for the orientation. Fig. 6 shows the
setup of the tracking system attached to the head-
mounted display.
ICINCO 2005 - ROBOTICS AND AUTOMATION
152

Head-Mounted Display
Microphone
Gyroscope Cube
Gyroscope
Microcontroller
Figure 6: Top view on the hardware setup consisting of
four microphones and a gyroscope cube mounted on a head-
mounted display.
5 GAME APPLICATIONS
In order to prove the applicability of the proposed
software framework, two game applications were im-
plemented.
5.1 Quake
The first game application is a modification of the
commercially available first person game Quake III
Arena (id Software, 2001). The resulting modifica-
tion is called MCQuake.
In MCQuake the modifications include a CORBA
client that implements the interface required by the
software framework. In order to control the avatar,
MCQuake simulates normal user input from the po-
sitions received from MC Server. Based on the the
last position of the avatar and on the commanded po-
sition a motion vector is calculated, which is handed
to the game engine. The game engine now moves the
avatar accordingly. By doing a collision detection, it
prevents the avatar from moving through walls.
The height of the target position has also to be
mapped onto the avatar’s position in the virtual envi-
ronment. The virtual environment supports two kinds
of height information, which are mapped differently
as described below.
The first kind of height information is the absolute
height of the avatar. This height is unrestricted al-
lowing the avatar to climb stairs. Absolute height is
handled by the game engine itself. If, for example,
the user maneuvers the avatar over a set of stairs, the
avatar’s absolute height changes with the height of the
floor beneath him.
The second kind of height information, called view
height, is relative to the floor the avatar moves on. In
the game, however, it is restricted to only two differ-
ent values used for crouched and normal movement.
A threshold applied to the user’s view height in the
user environment, determines which kind of move-
ment is to be used.
Given these mappings, the user is now able to con-
trol the avatar in an intuitive way in arbitrarily large
virtual environments by normal walking. Of course,
MCQuake also supports other kinds of motion, like
running and strafing, which are very common in first
person games. For Motion Compression, there is no
difference between those and normal walking as mo-
tion is always handled as a sequence of position up-
dates.
5.2 PacMan
A second game application is a custom build first
person telepresence version of the arcade game clas-
sic PacMan, called paMCan (Pa
cMan with a Motion
C
ompression driven artificial environment) as shown
fin Fig. 7. While MCQuake is written in C, paMCan
is written completely in python. In order to obtain
high quality graphics output, cgkit (Baas, 2005) was
used as graphics back end. For paMCan the path pre-
diction module was modified in such a way, that it
uses not only view direction, but also the virtual map
layout.
Figure 7: An impression of the paMCan-game.
Motion commands are handled similar to MC-
Quake. The game application computes a motion vec-
tor and moves the avatar accordingly if no obstacles
block the way. However, if there are obstacles, the
motion vector is modified in accordance with the map
information. This prevents the avatar from moving
through walls. Although modifying the motion vec-
tor leads to a displacement of the commanded avatar
positions and the actual avatar position, this has no ef-
fect on user and game. In paMCan view height is the
only height information and is mapped directly.
A FRAMEWORK FOR TELEPRESENT GAME-PLAY IN LARGE VIRTUAL ENVIRONMENTS
153
6 EXPERIMENTAL EVALUATION
In order to gain a high degree of realism the setup
uses a high quality head-mounted display with a res-
olution of 1280 × 1024 Pixels per eye and a field
of view of 60
◦
. Both the game engine and the MC
Server, run on a multimedia Linux-PC, which allows
a frame rate of approximately 80 images/sec for MC-
Quake and 60 images/sec for paMCan.
The acoustic tracking system currently provides 15
estimates per second for the position and 50 estimates
per second for the orientation, which is enough for
the given application. Fig. 8 illustrates a motion tra-
jectory recorded by the tracking system. The vec-
tors are directed in view directions. It can be ob-
served, that the tracking system has a good relative
accuracy, which is very important for the given appli-
cation to avoid shaking images. Absolute accuracy, or
ground truth, is of less importance. If the tracking sys-
x-axis in meters
Start position End position
Discarded
measurements
y-axis in meters
2
2
-2
-2
1.5
1.5
-1.5
-1.5
1
1
-1
-1
0.5
0.5
-0.5
-0.5
0
0
2.5
2.5
-2.5
-2.5
Figure 8: The estimated translation sequences in a test run
with a predefined motion trajectory.
tem detects outliers, it discards the measurement and
provides no estimate.The tracking system again pro-
vides reasonable estimates after some acoustic mea-
surements.
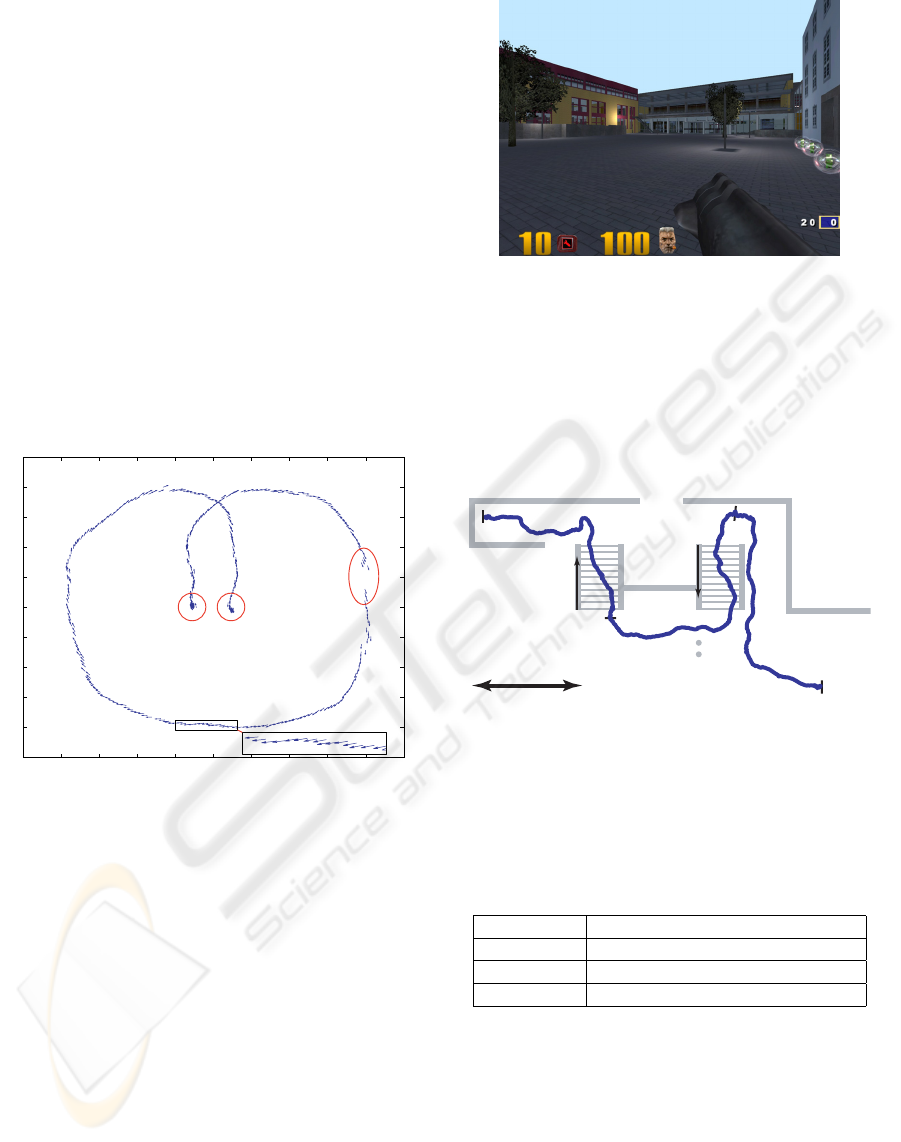
In order to test the users’ ability to navigate prop-
erly in the virtual environment, an environment well-
known to the users was chosen. Hence the map from
MensaQuake (The MensaQuake Project, 2002) was
loaded into MCQuake. This map is a realistic model
of the student cafeteria of the University of Karlsruhe
(Fig. 9).
The experiment compares the time a user needs to
navigate his avatar along a specified path in the virtual
cafeteria using MCQuake and Quake with keyboard
and mouse as inputs. In addition the user was asked
to walk the same path in the real cafeteria. In order to
avoid effects of user adaptation, a user was chosen for
Figure 9: Impression of the student cafeteria in MC-
Quake. (The MensaQuake Project, 2002)
the experiment, who was experienced in both, using
Motion Compression and Quake with standard input
devices. He was also familiar with the cafeteria. The
path was partitioned into three parts (a), (b), and (c),
as shown in Fig. 10.
5 m
(a)
(b)
(c)
up
down
Figure 10: Actual user path from the completion time ex-
periment in the virtual cafeteria.
Table 1 gives a comparison of the completion times
gathered in this experiment. When using Quake with
Table 1: Average time for a specified path from three runs
in the virtual and real cafeteria, respectively.
(a) (b) (c) total
Quake 4.8 s 4.7s 4.1 s 13.4s
real 8.9s 14.0 s 15.4s 38.2 s
MCQuake 15.0s 15.1 s 14.4s 44.5 s
standard inputs the avatar reaches his goal much faster
than in MCQuake. This is a result of unrealistically
high walking speed in standard Quake, even when
running mode is turned off. A comparison with walk-
ing in the real cafeteria shows, that MCQuake pro-
vides a more realistic motion. Thus, the gaming expe-
rience is more realistic than with common game con-
trol.
It can be observed, that users using Motion Com-
pression for the first time start with a few cautious
ICINCO 2005 - ROBOTICS AND AUTOMATION
154

steps. After several minutes of adjustment, however,
they adapt to the system and are able to navigate intu-
itively through the target environment.
When playing paMCan the users adapted to the
system even faster. In fact, all three testers stated, that
they did not notice the influence of Motion Compres-
sion at all. This fact may be a result of paMCan’s dy-
namic environment, which provides much more dis-
tractions to the user than most other target environ-
ments. In paMCan the user has to collect pills, escape
from ghosts, and navigate through a narrow maze,
leaving him less time to focus on the inconsistency
of visual and proprioceptive feedback.
7 CONCLUSIONS
Telepresence techniques were designed for control-
ling robots remotely. Since the remote environment
can easily be replaced by a virtual environment, telep-
resence techniques can also be used to control an
avatar in a first person game.
This paper presented a CORBA-based framework
for telepresent game-play in large virtual environ-
ments using Motion Compression. The algorithm al-
lows a user to control the avatar intuitively through
large virtual environments, by actual locomotion in a
limited user environment. This framework was tested
with two different game applications, MCQuake and
paMCan. Motion Compression proved to be very in-
tuitive as an input for the virtual reality games. As a
result, users had a realistic impression of the virtual
environment and, thus, experienced a high degree of
presence.
In order to give the users the possibility to experi-
ence the virtual environment with all senses, we will
implement a haptic feedback device, which allows to
feel obstacles and weapon recoil. This will lead to an
even higher degree of immersion.
The authors believe, that this new kind of gam-
ing experience will lead to a revolution in how peo-
ple experience computer games. We expect systems
like this to become omnipresent in gaming halls in
the next couple of years. As soon as the hardware
is affordable, people might even start installing these
systems in their homes.
ACKNOWLEDGEMENTS
The authors thank two teams of students for the im-
plementation of the games. Henning Groenda and
Fabian Nowak implemented MCQuake. paMCan was
written by Jens K
¨
ubler, Jan Wassenberg, and Lutz
Winkler.
REFERENCES
Baas, M. (2005). cgkit – The Python Computer Graphics
Kit. http://cgkit.sourceforge.net/.
Beutler, F. and Hanebeck, U. D. (2005). Closed-Form
Range-Based Posture Estimation Based on Decou-
pling Translation and Orientation. In Proceedings of
IEEE Intl. Conference on Acoustics, Speech, and Sig-
nal Processing (ICASSP05), pages 989–992, Pennsyl-
vania, PA, USA.
Cruz-Neira, C., Sandin, D. J., and DeFanti, T. A. (1993).
Surround-Screen Projection-Based Virtual Reality:
The Design and Implementation of the CAVE. In
Proceedings of the 20th ACM Annual Conference on
Computer Graphics and Interactive Techniques (SIG-
GRAPH 1993), pages 135–142, Anaheim, CA, USA.
Darken, R. P., Allard, T., and Achille, L. B. (1999). Spa-
tial Orientation and Wayfinding in Large-Scale Virtual
Spaces ii. Presence, 8(6):iii–vi.
id Software (2001). Quake III Arena. http:
//www.idsoftware.com/games/quake/
quake3-arena.
Iwata, H. (1999). The Torus Treadmill: Realizing Locomo-
tion in VEs. IEEE Computer Graphics and Applica-
tions, 19(6):30–35.
Iwata, H., Yano, H., Fukushima, H., and Noma, H. (2005).
CirculaFloor. IEEE Computer Graphics and Applica-
tions, 25(1):64–67.
Nitzsche, N., Hanebeck, U. D., and Schmidt, G. (2004).
Motion Compression for Telepresent Walking in
Large Target Environments. Presence, 13(1):44–60.
Peterson, B., Wells, M., Furness III, T. A., and Hunt, E.
(1998). The Effects of the Interface on Navigation in
Virtual Environments. In Proceedings of Human Fac-
tors and Ergonomics Society 1998 Annual Meeting,
volume 5, pages 1496–1505.
Piekarski, W. and Thomas, B. (2002). ARQuake: The Out-
door Augmented Reality Gaming System. ACM Com-
munications, 45(1):36–38.
Rajlich, P. (2001). CAVE Quake II. http://brighton.
ncsa.uiuc.edu/
∼
prajlich/caveQuake.
R
¨
oßler, P., Beutler, F., Hanebeck, U. D., and Nitzsche, N.
(2005). Motion Compression Applied to Guidance of
a Mobile Teleoperator. In Proceedings of the IEEE
Intl. Conference on Intelligent Robots and Systems
(IROS’05), Edmonton, AB, Canada.
Slater, M., Usoh, M., and Steed, A. (1994). Steps and Lad-
ders in Virtual Reality. In ACM Proceedings of VRST
’94 - Virtual Reality Software and Technology, pages
45–54.
Tarr, M. J. and Warren, W. H. (2002). Virtual Reality in
Behavioral Neuroscience and Beyond. Nature Neuro-
science Supplement, 5:1089–1092.
The MensaQuake Project (2002). MensaQuake. http:
//mensaquake.sourceforge.net.
A FRAMEWORK FOR TELEPRESENT GAME-PLAY IN LARGE VIRTUAL ENVIRONMENTS
155
