
CovP3DJ: Skeleton-parts-based-covariance Descriptor for Human
Action Recognition
Hany A. El-Ghaish
1
, Amin Shoukry
1,3
and Mohamed E. Hussein
2,3
1
CSE Department, Egypt-Japan University of Science and Technology, New Borg El-Arab City, Alexandria, Egypt
2
Information Sciences Institute, Arlington, Virginia, U.S.A.
3
Computer and Systems Engineering Department, Faculty of Engineering, Alexandria University, Alexandria, Egypt
Keywords:
Hand-crafted Features, Covariance Descriptor, Skeleton-based Human Action Recognition.
Abstract:
A highly discriminative and computationally efficient descriptor is needed in many computer vision applica-
tions involving human action recognition. This paper proposes a hand-crafted skeleton-based descriptor for
human action recognition. It is constructed from five fixed size covariance matrices calculated using strongly
related joints coordinates over five body parts (spine, left/ right arms, and left/ right legs). Since covariance
matrices are symmetric, the lower/ upper triangular parts of these matrices are concatenated to generate an
efficient descriptor. It achieves a saving from 78.26 % to 80.35 % in storage space and from 75 % to 90 %
in processing time (depending on the dataset) relative to techniques adopting a covariance descriptor based on
all the skeleton joints. To show the effectiveness of the proposed method, its performance is evaluated on five
public datasets: MSR-Action3D, MSRC-12 Kinect Gesture, UTKinect-Action, Florence3D-Action, and NTU
RGB+D. The obtained recognition rates on all datasets outperform many existing methods and compete with
the current state of the art techniques.
1 INTRODUCTION
Human action recognition is continually evolving to
cope with the challenges facing computer vision ap-
plications such as surveillance systems, robotics, in-
teractive games etc. Therefore, there is a vital need
to provide a highly discriminative, compact, robust,
and fast action descriptor. Datasets for human ac-
tion recognition can be collected using RGB cameras,
motion capture systems (Mocap) and Kinect cameras.
Data collected using RGB cameras (Aggarwal and
Ryoo, 2011) are affected by different factors such
as occlusion, variation in camera views, illumination
change, and background clutter. RGB videos suffer
from their inability to capture the body motion in the
3-D space. However, Mocap systems are capable of
monitoring human motion at specific 3-D locations
using accurate and expensive sensors. Mocap data is
acquired as 3-D depth data from which skeleton 3-
D joint locations are derived. HDM05 (M
¨
uller et al.,
2007) is an example of a Mocap dataset. Recently,
cheap but less accurate Kinect cameras are capable of
estimating the 3D skeleton joint locations. They are
being used with many applications such as interac-
tive games (XBOX), robots vision, surveillance, hu-
man action and sign language recognition. Estimation
of the rigid articulated joints of a human skeleton is
much easier using Mocap systems or Kinect cameras
than using RGB cameras (Vemulapalli et al., 2014).
There are intensive researches in recognizing hu-
man actions based on skeleton data. Some of them
use hand-crafted features while others use deep learn-
ing methods to automate the feature extraction pro-
cess. Despite the progress achieved by deep learning
techniques, they have the following disadvantages:
(1) they need large datasets to train their models and
don’t fit well with small datasets, (2) they require high
performance computing platforms for model training,
and (3) they remain black-boxes for a human mod-
eler (Schmidhuber, 2015). Accordingly, there is still
a vital need to use hand-crafted features especially in
situations where a large dataset is not available.
In this paper, a hand-crafted compact, robust and
discriminative descriptor is proposed for human ac-
tion recognition. It is a skeleton-part-based descrip-
tor as shown in Figure 1. Specifically, a covariance
matrix descriptor is constructed for each of the body
parts (spine, left/right arms, and left/right legs) that a
human can use to compose an action. Since the co-
variance matrix is symmetric, only the lower/upper
El-Ghaish, H., Shoukry, A. and Hussein, M.
CovP3DJ: Skeleton-parts-based-covariance Descriptor for Human Action Recognition.
DOI: 10.5220/0006625703430350
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
343-350
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
343
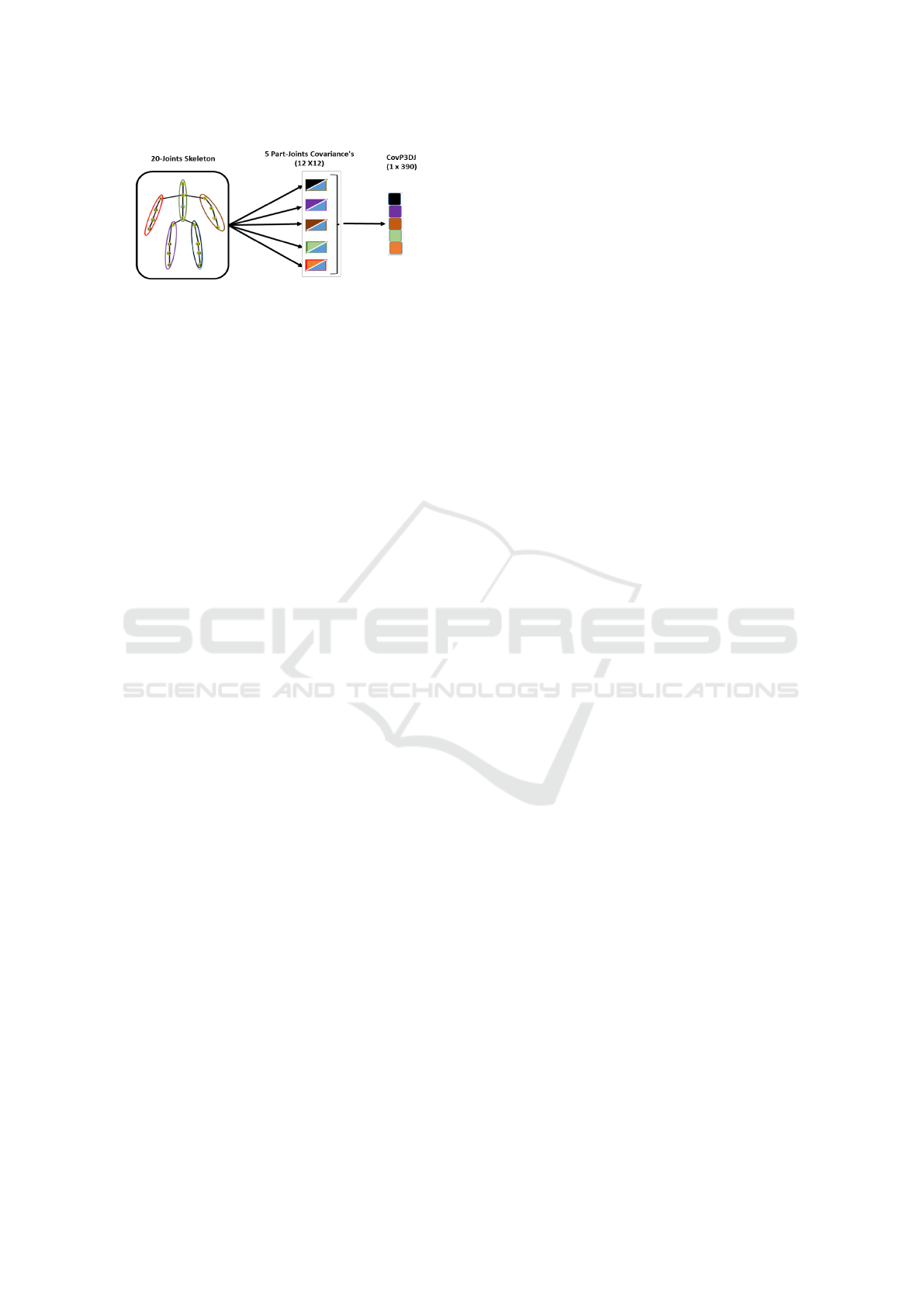
Figure 1: The construction of the proposed CovP3DJ de-
scriptor. The five body parts (spine, left/right arms, and
left/right legs) consists of 4 joints each. Each joint has 3
coordinates, which makes a total of 12 degrees of freedom.
Therefore, five covariance matrices each of size 12×12 can
be constructed, reduced (because of symmetry) and con-
catenated in a row vector of size 1 × 390 to represent the
whole body motion.
triangular part of each matrix is needed to represent
the motion of that part. Finally, these triangular parts
are concatenated into one vector descriptor which rep-
resents the corresponding body motion. The pro-
posed descriptor is compacted while remaining dis-
criminant, as will be shown in the experimental re-
sults. The proposed descriptor is called CovP3DJ
which means Covariance computation over the skele-
ton Parts of 3D Joints coordinates.
Organization: A review of the related work is
introduced in Section 2. The proposed recognition
framework and its key components are presented in
Section 3. The experimental results are analysed in
Section 4. Conclusion and future work are summa-
rized in Section 5.
2 RELATED WORK
Many ideas have emerged during the past few years
for solving the challenges imposed by human ac-
tion recognition using different modalities (skele-
ton, RGB images, and depth images), descriptors
and classifiers. In this section, we provide a brief
discussion about the work done on skeleton-based
and Covariance-based approaches for human action
recognition as they are the most related to our work.
In general, skeleton-based human action recogni-
tion methods can be classified into two major cate-
gories which are joint-based and part-based (Vemula-
palli et al., 2014). The joint-based methods deal with
the skeleton joints as a set of points in 3D space from
which features are extracted to describe the tempo-
ral evolution of their motions. On the other hand, the
part-based category view the skeleton body as a set
of parts which are connected using line segments that
form the human skeleton then extract features that are
based on the human geometry.
Joint-based Methods: The method in (Evange-
lidis et al., 2014a) proposes a Fisher kernel descriptor
to represent the skeleton quads of the action sequence
and its split sub-sequences. The concatenation of all
the generated Fisher vectors is considered the action
descriptor. Action recognition is based on SVM. In
(Li and Leung, 2017a) a graph-based representation
is used to describe the spatial structure of the skele-
ton joints, and the top-k Relative Variance of Joint
Relative Distance (RVJRD) decides the joints pairs
that should be selected according to the activity level.
Pyramids of covariances are used to extract the tem-
poral features. Classification is performed by match-
ing the similarities among graph kernels.
Part-based Methods: In (Vemulapalli et al.,
2014), a geometry descriptor between the body parts
using a rotation and a transformation matrix is rep-
resented in a Special Ecludian (SE) space descrip-
tor. Also, the Dynamic Time Warping (DTW), and
Fourier transformation are used for the alignment and
temporal features extraction. The SVM is used as a
classifier. The approach in (Chaudhry et al., 2013)
divides the skeleton into small parts hierarchically,
then bio-inspired features are extracted from each
part. The obtained features are modeled by a linear
dynamic system. In (Ohn-Bar and Trivedi, 2013b),
skeleton sequences were represented by estimating
the joints angles, trajectories, and the classification is
done using SVM. According to (Gavrila et al., 1995),
the angles between 3D joints are measured, and DTW
is used for temporal alignment.
Covariance-based Methods: The covariance is
the measure of how two random variables change
concerning each other. It is positive when variables
tend to show similar behavior and negative otherwise.
The covariance matrix descriptor computation can be
applied to the skeleton coordinates, RGB images, and
depth images. It has been used in many computer
vision applications. For instance, method in (Ma
et al., 2014) proposed a verification and person re-
identification recognition systems, gBiCov. Biolog-
ically inspired features (BIF) are extracted at differ-
ent scales using Gabor filters then encoded by covari-
ance matrix descriptor to represent the whole action.
KISSME (Koestinger et al., 2012) is used as a met-
ric for measuring the equivalence between descriptor
pairs. A covariance descriptor, Cov3DJ, is proposed
in (Hussein et al., 2013) to represent the motion of
the skeleton 3D joint coordinates over time. The tem-
poral dependencies of the skeleton joints are obtained
by a hierarchy of overlapped covariances. The Sup-
port Vector Machine (SVM) is used as a classifier.
Like the above Covariance-based approaches, we
use the covariance matrix but in a different way that
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
344

Normalization
2) Part-Joints
arrangement
1) Joints
Normalization
3) Part-Covariances
CovP3DJ
5-covariance's
(12x12)
CovP3DJ
(1 x 390)
t=Rt=1
C1
C21
C22
C23
4) Temporal Feature Extraction
C1
C21
C22
C23
CovP3DJ +TFE
(4 x 390)
5) Classification
R- Skeleton
Frames
Classification
Classification
Figure 2: The overall architecture of the proposed recog-
nition model. It receives frames sequence of length R.
The recognition model works in 5 steps: 1) Joints Nor-
malization, 2) Part-Joints arrangement, 3) Part-Covariances
CovP3DJ, 4) Temporal Features Extraction (TFE), and 5)
Classification.
enables the CovP3DJ descriptor to be more com-
pacted and robust in representing the action classes.
The skeleton 3D joints coordinates are grouped into
5 body parts to construct five covariance matrices.
Constructing the covariance matrix for each body part
(spine, arms, and legs) separately, then combining
them after selecting only the lower/upper triangular
part of each one has three main advantages. They
are our contribution: 1) Reducing the size of the de-
scriptor to about five times less than computing it over
the whole skeleton joints as in (Hussein et al., 2013).
2) Making the training and testing time shorter. 3)
Integrating five covariance matrices to represent the
whole body motion over the sequences of the action
frames.
3 THE FRAMEWORK
In this paper, our goal is to create a compact, ro-
bust, and discriminative descriptor to represent the
dynamics of the body pose and motion of the skele-
ton joints 3D coordinates over a sequence of action
frames. Towards this goal, we propose a covariance-
based descriptor that is constructed from the skeleton
3D joint coordinates of the body parts which we call
CovP3DJ. Basically, the overall proposed framework
is illustrated in Figure 2, and summarized in the fol-
lowing steps: (1) Skeleton 3D joints coordinates nor-
malization, (2) Part-joints arrangement (Spatial fea-
tures), (3) Part-covariance (CovP3DJ) (4) Temporal
Features Extraction (TFE), and (5) Classification.
(1) Joints Coordinates Normalization: the
skeleton coordinates are normalized to force all the
skeleton coordinates (X, Y, Z) of all joints to be in the
interval [0,1] to become scale invariant. Equation 1
indicates how the X coordinates are normalized. The
same equation is applied for the normalization of Y
Figure 3: Skeleton arrangement: (a) 25-Joints skeleton of
NTU RGB+D datast, (b) 20- Joints skeleton of MSR-12
Kinect Gesture and MSR-Action3D datasets, (c) 15-Joints
skeleton of Florence3D Action dataset. and (d) 20-Joints
skeleton of -Action dataset (it differs from 20-joint skeleton
of (b) only in the body model of joints numbering).
and Z coordinates.
X = (X − min(X))/(max(X) −min(X)) (1)
(2) Part-Joints Arrangement:, the skeleton 3D
joints coordinates are divided into five groups of the
body parts (spine, left/right arms, and left/right legs).
The benefit of this arrangement is to extract the part
motion among joints of the same body part that are
strongly correlated and ignores the weak correlation.
This step is implemented by grouping each part joints
in a separate structure and horizontally stacking their
X’s, Y’s and Z’s coordinates as shown in Figure 3 .
(3) Part-Covariance, CovP3DJ: to represent the
dynamic motion behavior of each body part over time,
the covariance matrix is evaluated over part joints to
measure how strong is the relation among them. Five
covariance matrices are constructed for body parts;
then the lower/upper triangular part of each matrix
is selected and converted to a feature vector. All
the 5 feature vectors are concatenated into one vec-
tor which we call CovP3DJ that represents the whole
body motion.
Covariance Descriptor, C(M), measures how
strong is the relation among M random variables by
encoding their joint probability distribution. C(M) di-
mension is M ×M which is of fixed size regardless of
the number of frames composing the action sequence,
as shown in Equation 3. Since C(M) is a symmetric
positive definite matrix, we can select the lower/upper
triangle part of the matrix to encode the entire infor-
mation into 1 × ((M × (M + 1))/2) dimension.
Assume that we have an action sequence of length
R and N is the number of skeleton Joints of 3D coordi-
nates (x,y,z) each. Then, M = 3× N random variables
as shown in Equation 2. Also, C(M) can be calculated
over the action sequence of length R frames by the
Equation 3 over all skeleton joints.
M = [x
1
,...,x
N
,y
1
,...,y
N
,z
1
,...,z
N
]
0
(2)
C(M) =
1
R − 1
R
∑
t=1
(M −
¯
M)(M −
¯
M)
0
(3)
CovP3DJ: Skeleton-parts-based-covariance Descriptor for Human Action Recognition
345

For our CovP3DJ, C(M) is constructed over each
body part to extract the spatial relation of the adjacent
part joints. In this case, M has (3 × (N/5)) random
elements, assuming that all joints have the same num-
ber of joints. We denote M here by M
p
(short for
random variable of each part joints) and the number
of joints N in each body part as N
p
, see Equation 4.
The covariance matrix, in this case, is called C(M
p
),
where p is the body part, as indicated in Equation 5.
M
p
= [x
1
,...,x
N
p
,y
1
,...,y
N
p
,z
1
,...,z
N
p
]
0
(4)
C(M
p
) =
1
R − 1
R
∑
t=1
(M
p
−
¯
M
p
)(M
p
−
¯
M
p
)
0
(5)
To clarify how the CovP3DJ reduces the descrip-
tor size by 78.68 % on 20-joints skeleton datasets
compared with the one that is constructed over all
skeleton joints. For Cov3DJ (Hussein et al., 2013),
assume that we have a 20-joints skeleton (N = 20
joints) and 5 body parts (p) of (N
p
= N/5 = 4) joints
of 3D coordinates (x,y,z). Then, M will be (N × 3 =
60) random elements, the C(M) dimension over the
sequence of any action is (M×M = 60 × 60 = 3600).
After the upper triangle part of C(M) is selected,
its dimension becomes (M(M + 1)/2 = 1830) as in
(Hussein et al., 2013). While our CovP3DJ as shown
in Figure 1 is slightly different, we have to construct
the C(M
p
), for each body part (p) of 4-joints of 3D
coordinates (N
p
= 4 joints). Then, M
p
will have
(3 × 4 = 12) random variables, the generated part co-
variances, C(M
p
), will be of size (12 × 12) , and the
lower/upper triangular part of them has a dimension
of ((12 × 13)/2 = 78). Afterward, all part-covariance
matrices are concatenated to generate one compacted
and robust feature vector of size (5 × 78 = 390). This
means that our descriptor size is reduced by 78.68 %
than the descriptor used in (Hussein et al., 2013) over
all skeleton joints. Similarly, the descriptor size is re-
duced by 78.26% and 80.35 % for the 15-joints skele-
ton and 25-joints skeleton datasets respectively.
(4) Temporal Feature Extraction (TFE): To
manage the action frames ordering, we use a tempo-
ral hierarchical overlapped covariances over the ac-
tion sequence of the body parts as in (Hussein et al.,
2013). Number of covariances (Nb
cov
) at different
levels (L) with overlap (OL) is calculated by Nb
cov
=
2
(L−1)
∗2−1. For example, at L=1 (over all sequence)
the number of generated covariances is one (C1) and
it is 3 (C21, C22, and C23) at L=2, see Figure 2 step
(4). If TFE is used for two levels, both the proposed
and Cov3DJ (Hussein et al., 2013) descriptors size
are multiplied by 4. It means that our descriptor (
CovP3DJ) is still reduced by 78.68 % in the case of
using temporal hierarchical covariances.
(5) Classification: We used the SVM to train
the classification model on MSR-12 Kinect Gesture,
MSR-Action3D, UTKinect-Action, and Florence3D
datasets. The Random Forest (RF) is used to train the
classifier on the NTU RGB+D dataset.
4 EXPERIMENTAL RESULTS
AND EVALUATION
In order to evaluate the effectiveness of the pro-
posed recognition system when CovP3DJ descrip-
tor is used, five public datasets: MSR-Action3D (Li
et al., 2010), MSR-12 Kinect Gesture (Fothergill
et al., 2012), UTKinect-Action (Xia et al., 2012), Flo-
rence3D Action (Seidenari et al., 2013), and NTU
RGB+D(Shahroudy et al., 2016) are tested. These
datasets are different in the number of samples, sub-
jects, the type of Kinect camera used, the number
of action classes and the input modalities (skeleton,
RGB and Depth map images) that are provided in
each dataset. In the next subsections datasets descrip-
tion, experimental results, and analysis are discussed.
4.1 MSR-Action3D Dataset
MSR-Action3D (Li et al., 2010) dataset is collected
using Kinect V1 which captures depth sequences of
actions using depth sensors. The collected skeleton
data consists of 20 joints. This dataset has twenty ac-
tions. The dataset actions are performed by ten sub-
jects twice with a total number of samples 567. It is
divided into three action sets: AS1, AS2, and AS3.
Each set consists of 8 classes without overlap among
sets. The dataset is evaluated using cross subject eval-
uation protocol in which half the subjects are used for
training, and the rest is used for testing.
Comparative results against the state of the art
methods on the MSR Action3D dataset are summa-
rized in Table 1. The CovP3DJ average (over the
three subsets) recognition accuracy is 90.98 %. It out-
performs the majority of existing methods, competes
with the approaches that got the highest recognition
rates by a low margin difference; less than 1% and
it outperforms the deep learning methods in (Veeriah
et al., 2015) and (Martens and Sutskever, 2011) by a
large margin.
For the sake of completeness, Table 2 records a
set of approaches that reported their recognition ac-
curacy’s with the same assessments over the action
subsets. The fifth column in Table 2 monitors the av-
erage accuracy of the three action subsets (AS1, AS2,
and AS3). It is clear from the last row of Table 2 that
our recognition accuracy 90.98 % is slightly lower
than the other methods on AS2. This occurs because
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
346
Table 1: Comparative results with the state of the art on
the MSR-Action3D dataset. The average accuracy (%) is
measured on the three action subsets (AS1, AS2, and AS3).
Methods Accuracy (%)
Rec. Neural Net. (Martens and Sutskever, 2011) 42.5
Hidden Markov Model (Xia et al., 2012) 78.97
Histograms of 3D joints (Xia et al., 2012) 78.97
EignJoints (Yang and Tian, 2012) 82.3
Space and Temporal part-sets (Wang et al., 2013) 90.22
Cov3DJ (Hussein et al., 2013) 90.53
Random Forest (Zhu et al., 2013) 90.90
Lie-Group (Vemulapalli et al., 2014) 89.48
HON4D (Oreifej and Liu, 2013) 88.89
DCSF (Xia and Aggarwal, 2013) 89.3
LSTM (Veeriah et al., 2015) 87.78
DMM-HOG (Yang et al., 2012) 85.52
LTBSVM (Slama et al., 2015a) 91.21
Pose-base (Wang et al., 2013) 90.2
HODG (Gowayyed et al., 2013) 91.3
Skeletal shape trajectories (Amor et al., 2016) 90
JSG(top-K RVJRD)+ JSGK (Graph) (Li and Leung, 2017b) 92.2
Bio-inspired Dynamic (Chaudhry et al., 2013) 90.0
FV of Skeleton Quads (Evangelidis et al., 2014a) 89.86
CovP3DJ, L=3, OL 90.98
Table 2: Recognition accuracy’s over the three action sets:
AS1, AS2, and AS3 of MSR Action3D dataset.
Method AS1 AS2 AS3 Avg(%)
Cov3DJ (Hussein et al., 2013) 88.04 89.29 94.29 90.53
Bag of 3d points (Li et al., 2010) 72.9 71.9 79.2 74.7
(Chen et al., 2016) 96.2 83.2 92 90.47
HOD (Gowayyed et al., 2013) 92.39 90.18 91.43 91.26
Lie in Group (Vemulapalli et al., 2014) 95.29 83.87 98.22 91.26
CovP3DJ, L=3, OL 93.48 84.82 94.29 90.98
the Cov3DJ descriptor does not distinguish well be-
tween the opposite actions. The results of the pro-
posed method are obtained with the number of levels
(L) in the temporal hierarchy is 3 (L=3), and the over-
lap (OL) is enabled. It is mentioned in the Table 2 as
(CovP3DJ, L=3, OL).
Table 3: Time comparison of a model training and testing in
Seconds when the proposed CovP3DJ and Cov3DJ (Hus-
sein et al., 2013) descriptors are used on the MSR-12 Kinect
Gestures and MSR-Action3D datasets.
Datasets Experiments CovP3DJ Cov3DJ
Reduced
Time
(%)
MSR-12 Kinect Gesture
L=2, OL= True
(Seconds)
LOO 71.23 322.06 71.33
50% Split 28.53 144 80.55
1/3 Training 25 103 75.73
2/3 Training 50 189 73.57
MSR- Action3D
L=3, OL=True
(Seconds)
AS1 0.58 7.20 94.3
AS2 0.57 6.33 90.22
AS3 0.58 7 91.7
Table 3 monitors a time comparison between the
CovP3DJ and Cov3DJ on the MSR-Action3D dataset.
It is obvious that there is a significant time saving
(about 91.5 %) when our proposed descriptor is used.
The obtained results in the table validate our hypoth-
esis (regarding the significant reduction in processing
time when the proposed descriptor is used).
4.2 MSR-12 Kinect Gesture Dataset
MSR-12 Kinect Gesture (Fothergill et al., 2012) is
considered a relatively large dataset that is collected
by Kinect V1 for action detection. It is annotated by
(Hussein et al., 2013) to be used for action and ges-
tures recognition. It consists of 594 sequences rep-
resenting 12 classes collected by 30 subjects. Each
sequence contains a gesture that is performed sev-
eral times by a single subject. The dataset is eval-
uated using four different scenarios (Hussein et al.,
2013): Leave one subject out (LOO), 50% subject
split (cross subject), 1/3 split, and 2/3 split. The
proposed descriptor, CovP3DJ is compared with the
Cov3DJ (Hussein et al., 2013) since it gives the most
recent results for the MSR-12 Gesture dataset.
Table 4 shows the recognition accuracies of
Cov3DJ (Hussein et al., 2013) and the proposed
CovP3DJ. Experiments in Table 4 are performed
when the number of levels (L) in the temporal hi-
erarchy is chosen to be one (L=1) and two (L=2)
with/without overlapping among sub-sequences of
the action. The proposed method delivers its high-
est score over the compared method in the 50 % sub-
ject split setup which means that CovP3DJ is robust
against the reduced number of samples. On the other
hand, the difference is small between the compared
methods for the other experiments. Also, the obtained
recognition rates of both methods can be ordered de-
scendingly starting from the highest score for the 2/3
training setup, then the 1/3 training setup, the Leave
one out, and finally the 50 % subject split. Results of
the two compared methods are similar in all experi-
mental setups, however ours has the advantages of re-
ducing both the descriptor size and the time to 78.68
% and about 75% (See Table 3 for time comparison),
respectively.
4.3 UTKinect-Action Dataset
UTKinect (Xia et al., 2012) dataset has been collected
by Kinect V1 sensors. The captured skeleton has 20
joints with 3D coordinates. Also, 199 sequences are
available in this dataset. It has 10 classes and each ac-
tion is performed twice by 10 subjects. Although this
dataset is small, it has a view and intra-class varia-
tion challenges. The experiments are conducted using
cross subject evaluation protocol (Zhu et al., 2013);
half subjects are used for training and the other for
testing. The average recognition rate on the UTkinect
dataset is collected after 10 different subjects splits.
Table 5 reports the obtained recognition accu-
racy’s on the UTKinect dataset. The highest and low-
est accuracies are 98.3% in (Li and Leung, 2017a) and
CovP3DJ: Skeleton-parts-based-covariance Descriptor for Human Action Recognition
347

Table 4: Recognition rate (%) on MSR-12 Gesture dataset using different experiments and descriptor setup, where L=number
of levels for computing the descriptor in hierarchy and OL equivalent to overlap between sub-sequences of the action.
Cov3DJ (Hussein et al., 2013) (%) CovP3DJ (%)
L=1 L=2 L=2, OL L=1 L=2 L=2, OL
Leave One Out 92.7 93.6 93.6 92.33 92.88 93.19
50 % Subject split 90.3 91.2 91.7 90.62 91.63 92.15
1/3 Training 97.7 97.8 97.9 97.0 97.34 97.34
2/3 Training 98.6 98.7 98.7 98.14 98.39 98.45
Table 5: Comparative results of the state of the art on
UTKinect dataset.
Method Accuracy %
(Xia et al., 2012) 90.92
(Devanne et al., 2015) 91.5
(Vemulapalli et al., 2014) 97.08
(Slama et al., 2015b) 88.5
(Luvizon et al., 2017) 98.00
(Zhu et al., 2013) 87.90
(Ding et al., 2016) 94.5
(Li and Leung, 2017a) 98.3
CovP3DJ, L=2, OL=True 97.02
87.90% in (Zhu et al., 2013) respectively. Our recog-
nition rate is 97.02% which is very near to the highest
recorded accuracy on the UTKinect dataset. Figure 4
(a) indicates the output confusion matrix of our sys-
tem on the dataset.
4.4 Florence3D-Action Dataset
Florence3D-Action (Seidenari et al., 2013) dataset
has 215 action sequences of 9 actions. The dataset
was collected using Kinect sensors and consists of
15-joints skeletons. Ten subjects performed each ac-
tion three times. Intra-class variation challenges exist
in this dataset because the same action may be per-
formed by the left or right hand. We followed the
cross subject evaluation protocol in (Zhu et al., 2013)
to test the performance of the proposed model.
Table 6: Comparative results of the state of the art on
Florence3D-Action dataset.
Method Accuracy %
(Seidenari et al., 2013) 82.0
(Devanne et al., 2015) 87.04
(Vemulapalli et al., 2014) 90.88
(Slama et al., 2015b) 94.39
CovP3DJ, L=2, OL=True 91.00
Table 6 records comparative results with the
state of art methods against the proposed method,
CovP3DJ. We faced a problem regarding the order of
action frames even if the temporal feature extraction
is used. Our recognition rate is 91% which is con-
sidered the second highest score in the table. Figure
4 (b) illustrates the obtained confusion matrix of the
CovP3DJ on the Folerence 3D dataset.
Figure 4: Confusion Matrices of the proposed CovP3DJ
on (a) UTKinect Aciton dataset and (b) Florence3D-Action
dataset.
4.5 NTU RGB+D Dataset
NTU-RGB+D (Shahroudy et al., 2016) is the largest
available dataset. This dataset consists of 56880 sam-
ples of 60 action classes. The actions are performed
by 40 subjects and three Kinect cameras with differ-
ent viewing angles and distances from the subjects
are used. We followed the evaluation protocol sug-
gested by the authors of this dataset(Shahroudy et al.,
2016), which consists of two scenarios: Cross-View
(CV) and Cross-Subject (CS).
Table 7: A comparative result of the state of the art on NTU
RGB+D dataset.
Method CS (%) CV (%)
1 HOG
2
(Ohn-Bar and Trivedi, 2013a) 32.24 22.27
2 Super Normal Vector (Yang and Tian, 2014) 31.82 13.61
3 HON4D (Oreifej and Liu, 2013) 30.56 7.26
4 Lie Group (Vemulapalli et al., 2014) 50.08 52.76
5 Skeletal Quads (Evangelidis et al., 2014b) 38.62 41.36
6 CovP3DJ, L=1, OL=False 51.4 52.88
Table 7 reports results related to some hand-
crafted methods that have been conducted on NTU
RGB+D dataset. It is shown in Table 7 that our
CovP3DJ got the highest results (51.4% for CS and
52.88 % for CV) when L=1 and OL=False against the
used hand-crafted approaches on the NTU RGB+D
dataset. These results are obtained after normalizing
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
348

the skeleton coordinates and camera views in order to
make the model skeleton and views invariant.
5 CONCLUSIONS AND FUTURE
WORK
We presented a skeleton part based covariance de-
scriptor (CovP3DJ) for human action recognition.
CovP3DJ is the concatenation of the lower/upper tri-
angular parts of five applied covariance matrices over
body parts (spine, arms, and legs). The descriptor
achieves a saving of 78.36 %, 78.68%, and 80.35 for
15-joints, 20-joints, and 25-joints skeleton datasets
in storage space and from 75% to 90% in process-
ing time (depending on the dataset) compared with
techniques adopting a covariance descriptor based on
all the skeleton joints. The obtained average recogni-
tion accuracy’s are 90.98 %, 97.02% and 91.00% on
MSR-Action3D dataset, UTKinect and Florence3D
datasets respectively. It is between 92.33 and % 93.19
% using Leave One Out method and lies between
90.62 % and 92.15 % using the 50% split, 97.34%
using 1/3 Traing split and about 98.45 % using 2/3
Training split. The CovP3DJ acheived recognition
rates of 51.4 % in CS and 52.88 % in CV on the NTU
RGB+D dataset. Meanwhile, all the obtained recog-
nition rates of the proposed framework on all datasets
outperform the majority of existing methods and com-
pete with the state of the art. However, CovP3DJ is
simple and efficient in both space and time consump-
tion compared with other methods.
For the future work, we will integrate other fea-
tures/modalities beside the CovP3DJ to enhance the
power of the proposed framework in detecting not
only the pose and motion but also the direction of the
motion to reduce the miss-classification rates.
ACKNOWLEDGEMENTS
We would like to acknowledge Egypt-Japan Univer-
sity of Science and Technology (E-JUST), specially
the Cyber Physical System Laboratory (CPS) which
provided us with all the required hardware and soft-
ware tools to achieve this piece of research in Hu-
man Action Recognition. Also, We attribute credit
to Nanyang Technology Institution for providing us
with their NTU RGB+D dataset.
REFERENCES
Aggarwal, J. K. and Ryoo, M. S. (2011). Human activity
analysis: A review. ACM Computing Surveys (CSUR),
43(3):16.
Amor, B. B., Su, J., and Srivastava, A. (2016). Action
recognition using rate-invariant analysis of skeletal
shape trajectories. IEEE transactions on pattern anal-
ysis and machine intelligence, 38(1):1–13.
Chaudhry, R., Ofli, F., Kurillo, G., Bajcsy, R., and Vi-
dal, R. (2013). Bio-inspired dynamic 3D discrimi-
native skeletal features for human action recognition.
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition Workshops, pages 471–
478.
Chen, C., Liu, K., and Kehtarnavaz, N. (2016). Real-
time human action recognition based on depth mo-
tion maps. Journal of real-time image processing,
12(1):155–163.
Devanne, M., Wannous, H., Berretti, S., Pala, P., Daoudi,
M., and Del Bimbo, A. (2015). 3-d human action
recognition by shape analysis of motion trajectories
on riemannian manifold. IEEE transactions on cyber-
netics, 45(7):1340–1352.
Ding, W., Liu, K., Cheng, F., and Zhang, J. (2016). Learn-
ing hierarchical spatio-temporal pattern for human ac-
tivity prediction. Journal of Visual Communication
and Image Representation, 35:103–111.
Evangelidis, G., Singh, G., and Horaud, R. (2014a). Skele-
tal quads: Human action recognition using joint
quadruples. Ieee Icpr, pages 4513–4518.
Evangelidis, G., Singh, G., and Horaud, R. (2014b). Skele-
tal quads: Human action recognition using joint
quadruples. In Pattern Recognition (ICPR), 2014
22nd International Conference on, pages 4513–4518.
IEEE.
Fothergill, S., Mentis, H., Kohli, P., and Nowozin, S.
(2012). Instructing people for training gestural inter-
active systems. In Proceedings of the SIGCHI Confer-
ence on Human Factors in Computing Systems, pages
1737–1746. ACM.
Gavrila, D. M., Davis, L. S., et al. (1995). Towards 3-
d model-based tracking and recognition of human
movement: a multi-view approach. In International
workshop on automatic face-and gesture-recognition,
pages 272–277.
Gowayyed, M. A., Torki, M., Hussein, M. E., and El-
Saban, M. (2013). Histogram of oriented displace-
ments (hod): Describing trajectories of human joints
for action recognition. In IJCAI, pages 1351–1357.
Hussein, M. E., Torki, M., Gowayyed, M. A., and El-Saban,
M. (2013). Human action recognition using a tem-
poral hierarchy of covariance descriptors on 3d joint
locations. In IJCAI, volume 13, pages 2466–2472.
Koestinger, M., Hirzer, M., Wohlhart, P., Roth, P. M., and
Bischof, H. (2012). Large scale metric learning from
equivalence constraints. In Computer Vision and Pat-
tern Recognition (CVPR), 2012 IEEE Conference on,
pages 2288–2295. IEEE.
CovP3DJ: Skeleton-parts-based-covariance Descriptor for Human Action Recognition
349

Li, M. and Leung, H. (2017a). Graph-based approach for
3D human skeletal action recognition. Pattern Recog-
nition Letters, 87:195–202.
Li, M. and Leung, H. (2017b). Graph-based approach for
3d human skeletal action recognition. Pattern Recog-
nition Letters, 87:195–202.
Li, W., Zhang, Z., and Liu, Z. (2010). Action recognition
based on a bag of 3d points. In Computer Vision and
Pattern Recognition Workshops (CVPRW), 2010 IEEE
Computer Society Conference on, pages 9–14. IEEE.
Luvizon, D. C., Tabia, H., and Picard, D. (2017). Learn-
ing features combination for human action recognition
from skeleton sequences. Pattern Recognition Letters.
Ma, B., Su, Y., Ma, B., and Su, Y. (2014). Covariance De-
scriptor based on Bio-inspired Features for Person Re-
identification and Face Verification To cite this ver-
sion : Covariance Descriptor based on Bio-inspired
Features for Person re-Identification and Face Verifi-
cation.
Martens, J. and Sutskever, I. (2011). Learning recurrent
neural networks with hessian-free optimization. In
Proceedings of the 28th International Conference on
Machine Learning (ICML-11), pages 1033–1040.
M
¨
uller, M., R
¨
oder, T., Clausen, M., Eberhardt, B., Kr
¨
uger,
B., and Weber, A. (2007). Mocap database hdm05.
Institut f
¨
ur Informatik II, Universit
¨
at Bonn, 2:7.
Ohn-Bar, E. and Trivedi, M. (2013a). Joint angles similari-
ties and hog2 for action recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition Workshops, pages 465–470.
Ohn-Bar, E. and Trivedi, M. M. (2013b). Joint angles simi-
larities and HOG2 for action recognition. IEEE Com-
puter Society Conference on Computer Vision and
Pattern Recognition Workshops, pages 465–470.
Oreifej, O. and Liu, Z. (2013). Hon4d: Histogram of ori-
ented 4d normals for activity recognition from depth
sequences. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
716–723.
Schmidhuber, J. (2015). Deep learning in neural networks:
An overview. Neural networks, 61:85–117.
Seidenari, L., Varano, V., Berretti, S., Bimbo, A., and Pala,
P. (2013). Recognizing actions from depth cameras as
weakly aligned multi-part bag-of-poses. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition Workshops, pages 479–485.
Shahroudy, A., Liu, J., Ng, T.-T., and Wang, G. (2016).
Ntu rgb+ d: A large scale dataset for 3d human activ-
ity analysis. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1010–1019.
Slama, R., Wannous, H., Daoudi, M., and Srivastava, A.
(2015a). Accurate 3d action recognition using learn-
ing on the grassmann manifold. Pattern Recognition,
48(2):556–567.
Slama, R., Wannous, H., Daoudi, M., Srivastava, A., Slama,
R., Wannous, H., Daoudi, M., Srivastava, A., and Ac-
tion, A. (2015b). Accurate 3D Action Recognition
using Learning on the Grassmann Manifold Accurate
3D Action Recognition using Learning on the Grass-
mann Manifold. 48:556–567.
Veeriah, V., Zhuang, N., and Qi, G.-J. (2015). Differential
recurrent neural networks for action recognition. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 4041–4049.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2014). Hu-
man action recognition by representing 3d skeletons
as points in a lie group. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 588–595.
Wang, C., Wang, Y., and Yuille, A. L. (2013). An approach
to pose-based action recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 915–922.
Xia, L. and Aggarwal, J. (2013). Spatio-temporal depth
cuboid similarity feature for activity recognition using
depth camera. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
2834–2841.
Xia, L., Chen, C.-C., and Aggarwal, J. (2012). View invari-
ant human action recognition using histograms of 3d
joints. In Computer Vision and Pattern Recognition
Workshops (CVPRW), 2012 IEEE Computer Society
Conference on, pages 20–27. IEEE.
Yang, X. and Tian, Y. (2014). Super normal vector for activ-
ity recognition using depth sequences. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 804–811.
Yang, X. and Tian, Y. L. (2012). Eigenjoints-based action
recognition using naive-bayes-nearest-neighbor. In
Computer vision and pattern recognition workshops
(CVPRW), 2012 IEEE computer society conference
on, pages 14–19. IEEE.
Yang, X., Zhang, C., and Tian, Y. (2012). Recognizing ac-
tions using depth motion maps-based histograms of
oriented gradients. In Proceedings of the 20th ACM
international conference on Multimedia, pages 1057–
1060. ACM.
Zhu, Y., Chen, W., and Guo, G. (2013). Fusing spatiotem-
poral features and joints for 3d action recognition. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition Workshops, pages 486–
491.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
350
