
Pedestrian Attribute Recognition with Part-based CNN and Combined
Feature Representations
Yiqiang Chen
1
, Stefan Duffner
1
, Andrei Stoian
2
, Jean-Yves Dufour
2
and Atilla Baskurt
1
1
Universit
´
e de Lyon, CNRS, INSA-Lyon, LIRIS, UMR5205, France
2
Thales Services, ThereSIS, Palaiseau, France
Keywords:
Pedestrian Attributes, Convolutional Neural Networks, Multi-label Classification.
Abstract:
In video surveillance, pedestrian attributes such as gender, clothing or hair types are useful cues to identify
people. The main challenge in pedestrian attribute recognition is the large variation of visual appearance and
location of attributes due to different poses and camera views. In this paper, we propose a neural network com-
bining high-level learnt Convolutional Neural Network (CNN) features and low-level handcrafted features to
address the problem of highly varying viewpoints. We first extract low-level robust Local Maximal Occur-
rence (LOMO) features and learn a body part-specific CNN to model attribute patterns related to different
body parts. For small datasets which have few data, we propose a new learning strategy, where the CNN is
pre-trained in a triplet structure on a person re-identification task and then fine-tuned on attribute recognition.
Finally, we fuse the two feature representations to recognise pedestrian attributes. Our approach achieves
state-of-the-art results on three public pedestrian attribute datasets.
1 INTRODUCTION
Pedestrian attributes are defined as semantic mid-
level descriptions of people, such as gender, acces-
sories, clothing etc. (see Fig. 1). Since biometric fea-
tures like faces are often not visible or of too low res-
olution to be helpful in surveillance, pedestrian at-
tributes could be considered as soft-biometrics and
used in many surveillance applications like person de-
tection (Tian et al., 2015), person retrieval (Vaquero
et al., 2009), person identification (Layne et al., 2012)
etc. A clear advantage of using attributes in this con-
text is the possibility of querying a database of pedes-
trian images only by providing a semantic textual de-
scription (i.e. zero-short identification). Attributes
have also been successfully used in object recogni-
tion (Duan et al., 2012), action recognition (Liu et al.,
2011) and face recognition (Kumar et al., 2009).
The main challenges for pedestrian attribute
recognition are the large visual variation and large
spatial shifts due to the descriptions being on a
high semantic level. For instance, the same type of
clothes (e.g. shorts) can have very divers appearances.
The large spatial shifts w.r.t. the detected pedestrian
bounding boxes are caused by different body poses
and camera views, and a finer body part detection
or segmentation is challenging in surveillance-type
videos. Furthermore, in realistic settings, illumina-
tion changes and occlusion make the problem even
more challenging.
We propose a method to addresses these issues
with the following contributions:
• High-level learnt features and low-level features
are extracted and fused at a late training and pro-
cessing stage to get a more robust feature repre-
sentation. We will show that the two types of
features are complementary and that combining
them better models the divers appearances and lo-
cations of attributes.
• We propose to use a specific Convolutional Neu-
ral Network (CNN) architecture with 1D convolu-
tion layers operating on different parts of feature
maps to model attribute patterns related to differ-
ent body parts. In order to deal with large spa-
tial shifts, we extract LOMO features (Liao et al.,
2015) which have been specifically designed for
viewpoint-invariant pedestrian re-identification.
• For small datasets, we propose to pre-train the
deep neural network with re-identification data.
This allows for a more effective attribute learn-
ing. We show that the knowledge learnt from the
re-identification task can be transferred and help
the attribute learning.
114
Chen, Y., Duffner, S., Stoian, A., Dufour, J-Y. and Baskurt, A.
Pedestrian Attribute Recognition with Part-based CNN and Combined Feature Representations.
DOI: 10.5220/0006622901140122
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
114-122
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Some example images from pedestrian attribute
datasets.
• Our method achieves state-of-the-art results on
three public pedestrian attribute data sets: PETA,
APiS and VIPeR.
2 RELATED WORK
Numerous approaches for pedestrian attribute recog-
nition have been proposed in the past. Mid-level
attributes were first used for human recognition by
(Vaquero et al., 2009). The person image is parsed
into regions, and each region is associated with a
classifier based on Haar-like features and dominant
colours. Then, the attribute information is used to in-
dex surveillance video streams. The approach pro-
posed by (Layne et al., 2012) extracts a 2 784-
dimensional low-level colour and texture feature vec-
tor for each image and trains an SVM for each at-
tribute. The attributes are further used as a mid-level
representation to aid person re-identification. (Zhu
et al., 2013), in their work, introduced the pedestrian
attribute database APiS. Their method determines the
upper and lower body regions according to the aver-
age image and extracts colour and gradient histogram
features (HSV, MB-LBP, HOG) in these two regions.
Then, an Adaboost classifier is trained to recognise
attributes. The drawback of these approaches is that
all attributes are recognised independently, that is, the
relation between attributes is not taken into account.
To overcome this limitation, (Zhu et al., 2014)
proposed an interaction model, based on their Ad-
aboost approach, learning an attribute interaction re-
gressor. The final prediction is a weighted combi-
nation of the independent score and the interaction
score. (Deng et al., 2014) constructed the pedes-
trian attribute dataset “PETA”. Their approach uses a
Markov Random Field (MRF) to model the relation
between attributes. The attributes are recognised by
exploiting the context of neighbouring images on the
MRF-based graph. (Chen et al., 2017) uses a multi-
label Multi-layer perceptron to classify the attributes
in the same time.
With the recent success of Deep Learning for com-
puter vision applications, methods based on Convo-
lutional Neural Network (CNN) models have been
proposed for pedestrian recognition. For example,
(Li et al., 2015) fine-tuned the CaffeNet (similar to
AlexNet (Krizhevsky et al., 2012)) trained on Ima-
geNet to perform simple and multiple attribute recog-
nition. (Zhu et al., 2015) proposed to divide the
pedestrian images into 15 overlapping parts where
each part connects to several CNN pipelines with sev-
eral convolution and pooling layers.
Unlike these approaches that use either deep
feature hierarchies or “hand-crafted” features, our
method effectively fuses shift-invariant lower-level
features with learnt higher-level features to build a
combined representation that is more robust to the
large intra-class variation which is inherent in at-
tribute recognition. Recently, some deep features and
“hand-crafted” features combination approaches have
been also used in saliency detection(Li et al., 2017),
face recognition(Lumini et al., 2016) and person re-
identification(Wu et al., 2016).
We further address the large intra-class variation
issue by a specific CNN architecture operating on dif-
ferent image regions related to the pedestrian body
parts and using 1D horizontal convolutions on these
part-based feature maps. We experimentally show
that our system works well for both larger and smaller
datasets thanks to a pre-training stage on the related
task of pedestrian re-identification.
3 PROPOSED METHOD
Our approach takes as input a cropped colour (RGB)
image of a pedestrian (resized to 128x48 pixels) and
outputs a vector encoding the score for each attribute
to recognise. The overall architecture of the proposed
approach is shown in Fig. 2.
The framework consists of two branches.
One branch extracts the viewpoint-invariant,
hand-crafted Local Maximal Occurrence (LOMO)
features. The extracted LOMO features are then pro-
jected into a linear subspace using Principal Compo-
nent Analysis (PCA). The aim of this step is two-
fold: first, to reduce the dimension of the LOMO fea-
ture vector removing potential redundancies, and sec-
Pedestrian Attribute Recognition with Part-based CNN and Combined Feature Representations
115
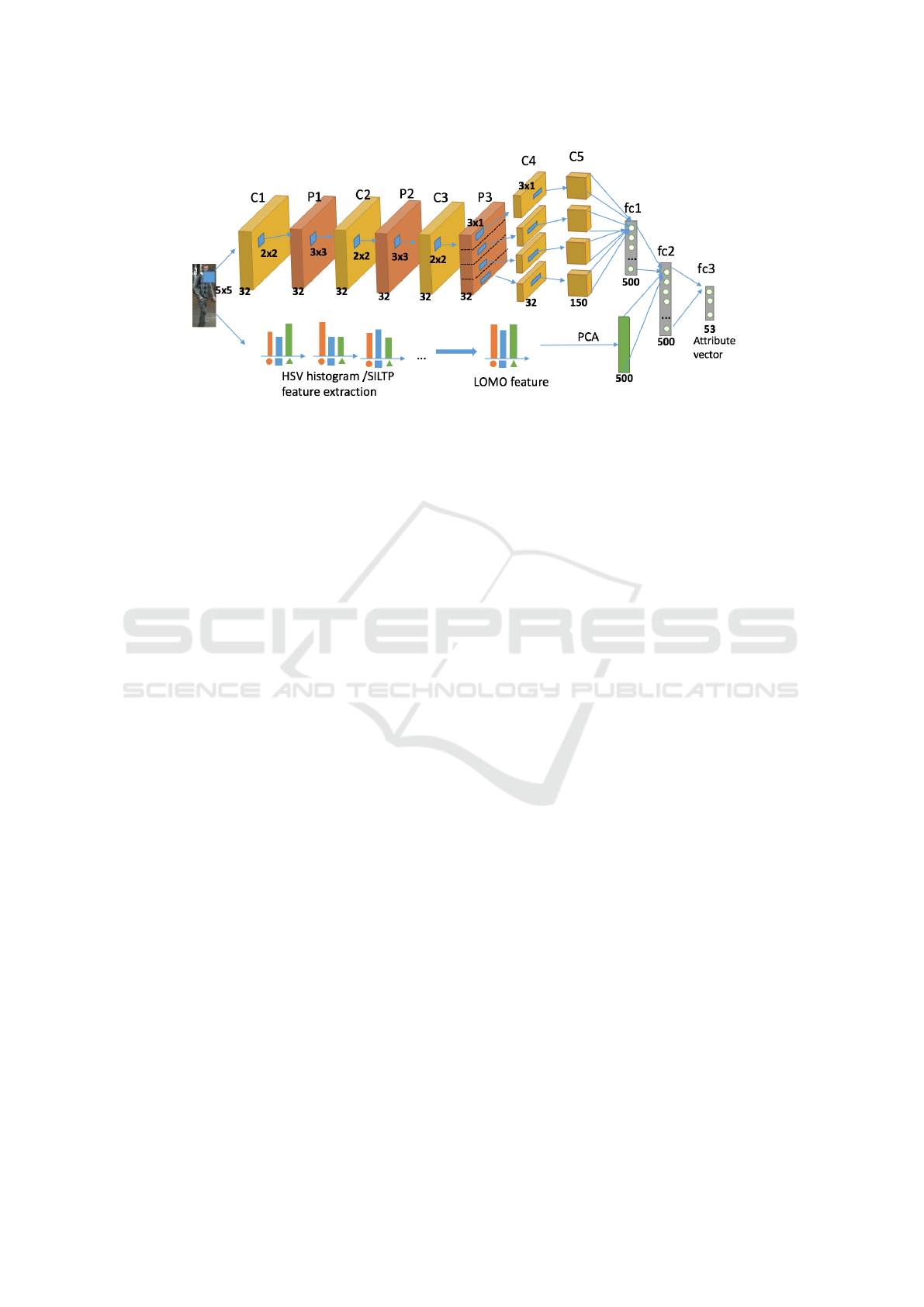
Figure 2: Overview of our pedestrian attribute recognition approach. Learnt features from a part-based CNN model are
integrated with highly shift-invariant low-level LOMO features and used for multi-label classification.
ond, to balance the contribution of CNN features and
LOMO features in the succeeding fusion that com-
bines information represented in the two feature vec-
tors.
The second branch is a Convolutional Neural Net-
work extracting higher-level discriminative features
by several succeeding convolution and pooling oper-
ations that become specific to different body parts at
a given stage (P3) in order to account for the possible
displacements of pedestrians.
To carry out this fusion, the output vectors of the
two branches are concatenated and connected to two
fully-connected layers (fc2+fc3) effectively perform-
ing the final attribute classification. We will explain
these steps in more detail in the following.
3.1 LOMO Feature Extraction
Recently, pedestrian re-identification methods using
LOMO feature (Liao et al., 2015) have achieved state-
of-the-art performance, and here we apply these low-
level features on the related task of attribute recogni-
tion in order to extract relevant cues from pedestrian
images.
In the LOMO feature extraction method proposed
by (Liao et al., 2015), the Retinex algorithm is in-
tegrated to produce a colour image that is consistent
with human perception. To construct the features,
two scales of Scale-Invariant Local Ternary Patterns
(SILTP) (Liao et al., 2010) and an 8×8×8-bin joint
HSV histogram are extracted for an illumination-
invariant texture and colour description. The sub-
window size is 10×10, with an overlapping step of
5 pixels describing local patches in 128×48 images.
Following the same procedure, features are extracted
at 3 different image scales. For all sub-windows on
the same image line, only the maximal value of the
local occurrence of each pattern among these sub-
windows is retained. In that way, the resulting fea-
ture vector achieves a large invariance to view point
changes and, at the same time, captures local region
characteristics of a person. We refer to (Liao et al.,
2015) for more details.
In our approach, as illustrated at the bottom of
Fig. 2, we project these extracted LOMO features of
size 26 960 on a reduced linear subspace of dimen-
sion 500, in order to facilitate the later fusion and
to remove most of the redundant information that is
contained in these features. The projection matrix is
learnt using PCA on the LOMO feature vectors com-
puted on the training dataset.
3.2 Part-based CNN
In addition to the lower-level LOMO features which
provide a higher invariance, we propose to extract
deep feature hierarchies by a CNN model providing
a higher level of abstraction and a larger discrimina-
tion power since the features are directly learnt from
data.
As illustrated in Fig. 2, the CNN comprises three
alternating convolution and pooling layers. The size
of the first convolution (C1) is 5×5. The two follow-
ing (C2, C3) are of size 3×3. The kernel size of max-
pooling (P1-P3) is 2×2, and the number of channels
of convolution and pooling layers is 32. The result-
ing feature maps in P3 are divided vertically into 4
equal parts which roughly correspond to the regions
of head, upperbody, upperlegs and lowerlegs. The
intuition behind this is that in pedestrian images the
position of body parts varies much more horizontally
than vertically due to the articulation of a walking
person, for instance. Applying specific convolution
filters on these different horizontal bands thus forces
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
116

Figure 3: Illustration of the transfer learning from a re-identification task to attribute recognition. Left: the (shared) weights of
the triplet CNN are pre-trained in a weakly supervised manner for pedestrian re-identification using the triplet loss function.
Right: the CNN weights are integrated in our attribute recognition framework and the whole neural network is fine-tuned
using the weighted cross-entropy loss.
the CNN to extract features that are dedicated to dif-
ferent body parts and improves the overall learning
and generalisation performance. For each part, simi-
lar to (Varior et al., 2016), we use two layers (C4, C5)
with 1D horizontal convolutions of size 3×1 without
zero-padding to reduce the feature maps to a single
column. All the convolution layers in our model are
followed by batch normalization and ReLU activation
function (Krizhevsky et al., 2012). These 1D convo-
lutions allow to extract high-level discriminative pat-
terns for different horizontal stripes of the input im-
age. In the last convolution layer, the number of chan-
nels is increased to 150, and these feature maps are
given to a fully-connected layer (fc1) to generate an
output vector of dimension 500.
Then this output vector and the projected LOMO
feature vector are concatenated and processed by
two further fully-connected layers (fc2, fc3) to per-
form the multi-label classification. This late fusion
provides for a richer feature representation and ro-
bustness to viewpoint changes thanks to the shift-
invariance property of LOMO and the body part mod-
elling in our CNN architecture.
3.3 Training
To train the parameters of the proposed CNN, the
weights are initialised at random and updated using
stochastic gradient descent minimising the global
loss function (c.f . Eq. 1) on the given training set.
Since most attributes are not mutually exclusive,
i.e. pedestrians can have several properties at the
same time, the attribute recognition is a multi-label
classification problem. Thus, the multi-label version
of the sigmoid cross entropy is used as the overall
loss function:
E = −
1
N
N
∑
i=1
L
∑
l=1
[w
l
y
il
log(σ(x
il
))+(1 −y
il
)log(1−σ(x
il
)] ,
(1)
with σ(x) =
1
1 + exp(−x)
,
where L is the number of labels (attributes), N is the
number of training examples, and y
il
, x
il
are respec-
tively the l
th
label and classifier output for the i
th
im-
age. Usually, in the training set, the two classes are
highly unbalanced. That is, for most attributes, the
positive label (presence of an attribute) appears gener-
ally less frequently than the negative one (absence of
an attribute). To handle this issue, we added a weight
w to the loss function: w = −log
2
(p
l
), where p
l
is the
positive proportion of attribute l in the dataset.
As we will show in our experiments, for smaller
training dataset (like VIPeR), it is beneficial to pre-
train the CNN with a (possibly larger) pedestrian re-
identification dataset in a triplet architecture on the
re-identification task, and then to fine-tune the pre-
trained convolution layers on the actual attributes.
Figure 3 illustrates this transfer learning approach.
Person re-identification consists in matching im-
ages of the same individuals across multiple camera
views. In order to achieve this, we learn a distance
function that has large values for images from differ-
ent people and small values for images from the same
person. A CNN with triplet architecture (Lefebvre
and Garcia, 2013) can learn such a similarity function
by effectively learning a projection on a (non-linear)
subspace, where vectors from the same person are
forced to be close and vectors from different persons
are forced to be far. To this end, the network is pre-
sented with a triplet of pedestrian images composed
of an anchor example a, a positive image p from the
same person as the reference and a negative image n
Pedestrian Attribute Recognition with Part-based CNN and Combined Feature Representations
117
Table 1: Comparison of the 4 variants of our approach on PETA (in %).
Accuracy Recall@FPR=0.1 AUC
LOMO (dim 500) 88.7 72.5 89.8
LOMO (dim 1000) 89.8 73.7 90.3
baseline 89.7 76.2 92.0
baseline + 2D conv 90.0 76.9 92.2
baseline + 1D conv 90.5 77.3 92.1
baseline + part-based 1D conv 90.8 78.7 92.3
baseline + 1D conv + LOMO (dim 1000) 91.5 79.4 91.7
baseline + part-based 1D conv + LOMO (dim 1000) 91.7 81.3 93.0
from a different person. The weights of the network
for the three input images are shared. Let f(.) be the
output of the CNN. Then the loss function is defined
as:
E
triplet
= −
1
N
N
∑
i=1
[max(k f (a
i
) − f (p
i
)k
2
2
−k f (a
i
) − f (n
i
)k
2
2
+m, 0)] ,
(2)
with m being a constant margin. The network gets
updated when the negative image is closer than the
positive image to the reference image. During train-
ing, for a given triplet, the loss function pushes the
negative example away from the reference in the out-
put feature space and pulls the positive example closer
to it. Thus, by presenting many different triplet com-
binations, the network effectively learns a no-linear
projection to a feature space that better represents the
semantic similarity of pedestrians. The triplet archi-
tecture has been applied in object recognition (Wang
et al., 2014), face recognition (Lefebvre and Garcia,
2013), person re-identification (Ding et al., 2015).
Unlike the identification task learning features
that recognises the specific individuals, from the re-
identification data, the triplet network learns informa-
tive features that distinguish individuals, and the se-
mantic attributes that we want to recognise can be
considered such identify features at a higher level.
Therefore, this pre-learnt knowledge can be easily
transferred to attribute recognition.
4 EXPERIMENTS
4.1 Datasets
We evaluated our approach on three public bench-
marks: PETA, APiS and VIPeR (see Fig. 1).
The PETA dataset (Deng et al., 2014) is a large
pedestrian attribute dataset which contains 19 000 im-
ages from several heterogeneous datasets. 61 binary
attributes and 4 multi-class attributes are annotated.
In our attribute recognition evaluation, we follow the
experimental protocol of (Deng et al., 2014; Li et al.,
2015): dividing the dataset randomly in three parts:
9 500 for training, 1 900 for validation and 7 600 for
testing. Since different approaches (Deng et al., 2014;
Li et al., 2015; Zhu et al., 2017) have been evaluated
on different subsets of attributes, in our experiment
we use the union of all these subsets, i.e. 53 attributes.
The APiS dataset (Zhu et al., 2013) contains
3 661 images collected from surveillance and natural
scenarios. 11 binary attributes are annotated such as
male/female, shirt, backpack, long/short hair. We fol-
lowed the experimental setting of (Zhu et al., 2013).
A 5-fold cross-validation is performed, and the final
result is the average of the five tests.
The VIPeR dataset (Gray et al., 2007) contains
632 pedestrians in an outdoor environment, each hav-
ing 2 images from 2 different view points. 21 at-
tributes are annotated by (Layne et al., 2014). Each
dataset is divided into two equal-size non-overlapping
parts for training and testing (images from the same
person are not separated). We repeat the process 10
times and report the average result.
During training, we perform data augmentation by
randomly flipping and shifting the images slightly.
4.2 Parameter Setting
All weights of the neural network are initialised from
a Gaussian distribution with 0 mean and 0.01 stan-
dard deviation, and the biases are initialised to 0. The
learning rate is set to 0.01. We used dropout (Srivas-
tava et al., 2014) for the fully-connected layers with a
rate of 0.6.
For tests on PETA, the fc1 layer, fc2 layer and
PCA projected LOMO features are set to 1000 dimen-
sions. The batch size is 100. For tests on APiS and
VIPeR, fc1 fc2 layer sizes and PCA-projected LOMO
feature size are 500 dimensions, and the batch size is
50.
The neural network is learned “from scratch” for
tests on PETA and APiS. Since on VIPeR we have
only 632 training images. The network is pre-trained
with triplet loss on the CUHK03 dataset (Li et al.,
2014) which contains 13164 images of 1360 pedes-
trians. During training, the CNN part is fine-tuned
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
118
Table 2: Attribute recognition results on APiS (in %).
Attributes
Accuracy Recall@FPR=0.1 AUC
ours fusion(Zhu
et al., 2013)
interact(Zhu
et al., 2014)
ours fusion(Zhu
et al., 2013)
interact(Zhu
et al., 2014)
DeepMar(Li
et al., 2015)
ours
long jeans 93.5 89.9 89.2 93.8 96.1 96.2 96.5 97.4
long pants 94.2 78.7 80.6 93.3 92.5 93.9 97.1 97.1
M-S pants 93.7 76.7 85.1 90.0 92.4 92.8 95.5 96.0
shirt 88.4 68.2 74.5 65.5 83.9 83.9 88.0 87.3
skirt 95.6 58.3 61.3 80.5 90.0 91.2 91.0 90.5
T-shirt 79.6 56.2 56.5 66.3 85.4 85.5 90.6 88.7
gender 81.6 55.2 56.5 65.1 85.5 86.1 90.0 88.1
long hair 92.3 55.2 58.3 68.9 85.2 86.1 86.2 88.1
back bag 93.1 54.6 54.8 61.2 83.6 83.6 86.6 85.2
hand carrying 87.7 52.1 52.1 60.6 81.8 81.8 84.3 83.9
S-S bag 82.8 38.5 42.9 54.0 77.3 78.3 83.7 82.9
average 89.3 62.1 64.7 72.7 86.7 87.2 90.0 89.5
with a lower learning rate (0.0005).
4.3 Evaluation
The test protocol on PETA (Deng et al., 2014) pro-
poses to use the attribute classification accuracy. The
APiS dataset’s protocol (Zhu et al., 2013) uses the
average recall at a False Positive Rate (FPR) of 0.1
and the Area Under Curve (AUC) of the average Re-
ceiver Operating Characteristics (ROC) curves as per-
formance measures. As mentioned in (Zhu et al.,
2017), accuracy is not sufficient to evaluate the classi-
fication performance on unbalanced attributes. In our
experiment, we thus use all these three measures to
evaluate our approach.
4.4 Results
We first evaluated the effectiveness of the 1D horizon-
tal convolution layers, the body part division and the
fusion of LOMO and CNN features using the PETA
dataset. To show the effect of each contribution on the
overall performance, we first implemented a baseline
as a CNN with 3 consecutive convolution and max-
pooling layers (C1-P3) and a multilayer perceptron
using LOMO features of different PCA output dimen-
sions as input. Then we implemented different vari-
ants of the proposed method: baseline with 2 layers
of 3×3 convolution or 2 layers of 3×1 convolution,
CNNs with and without body part division, and CNNs
with and without LOMO feature fusion. Table 1 sum-
marises the results.
We can conclude that the spatail invariance of the
LOMO feature and the rich representation of the deep
CNN features are compelentary and the fusion in-
creases the overall recall and accuracy. 1D convo-
lutions and dividing into body part also slightly im-
proves the results. By performing all these, we obtain
the highest overall accuracy, recall and AUC.
The comparison with the state of the art on PETA
is shown in Table 3. In the literature, there are two
evaluation settings for the PETA dataset with 35 and
45 attributes respectively. Table 3 shows the results
on the 27 attributes that they have in common in order
to compare all methods. We also display the average
results for 35 and 45 attributes. Our method outper-
forms the state-of-the-art approach mlcnn by a mar-
gin of 3.4%, 14.3%, 6% points for the average accu-
racy recall and AUC on the 27 attributes and a margin
of 3.5%, 15%, 6.1% points on the 45 attributes. We
also outperform the DeepMar method by 9% points
on accuracy. Moreover, our approach achieves a bet-
ter score on almost all individual attributes.
The results on the APiS dataset are shown in Ta-
ble 4. Our method outperforms the Adaboost ap-
proach with fusion features and interaction models by
a margin of 6% and 2.3% points respectively for the
recall at FPR=0.1 and AUC. Only for the AUC, Deep-
Mar achieves a slightly better results (0.5% points)
which could be explained by its pre-training on the
large ImageNet dataset.
Finally, the results on the VIPeR dataset are shown
in Table 2. Our approach achieves a 9.8% point im-
provement in accuracy and 4.1% points on recall at
FPR=0.2 compared to the CNN-based state-of-the-art
approach mlcnn-p. For most of the attributes, our
method obtains a better score.
In summary, our approach outperforms the state
of the art (including CNN-based methods) on two
datasets and is on par with the best method on the
third one. This demonstrates the robustness of the
combined feature representation w.r.t. the high intra-
class variation and the discriminative power of the
proposed part-based CNN architecture.
Pedestrian Attribute Recognition with Part-based CNN and Combined Feature Representations
119
Table 3: Attribute recognition results on PETA (in %).
Attributes
Accuracy Rate (%) Recall@FPR=0.1 AUC
MRFr2(Deng
et al., 2014)
DeepMar(Li
et al., 2015)
mlcnn(Zhu
et al., 2017)
ours mlcnn(Zhu
et al., 2017)
ours mlcnn(Zhu
et al., 2017)
ours
personalLess30 83.8 85.8 81.1 86.0 63.8 80.8 88.5 93.8
personalLess45 78.8 81.8 79.9 84.7 59.4 74.9 84.6 91.9
personalLess60 76.4 86.3 92.8 95.4 70.2 83.0 87.7 92.8
personalLarger60 89.0 94.8 97.6 98.9 90.7 94.6 94.9 96.8
carryingBackpack 67.2 82.6 84.3 85.5 58.4 70.2 85.2 91.9
carryingOther 68.0 77.3 80.9 85.7 46.9 65.1 77.7 88.4
lowerBodyCasual 71.3 84.9 90.5 92.1 56.2 76.1 87.5 93.1
upperBodyCasual 71.3 84.4 89.3 91.2 62.1 74.2 87.2 92.5
lowerBodyFormal 71.9 85.2 90.9 93.3 72.5 82.8 87.8 92.7
upperBodyFormal 70.0 85.1 91.1 93.4 70.5 83.4 87.6 92.9
accessoryHat 86.7 86.7 96.1 97.5 86.1 89.9 92.6 95
upperBodyJacket 67.9 79.2 92.3 94.7 53.4 77.4 81.0 92.1
lowerBodyJeans 76.0 85.7 83.1 87.6 67.6 83.2 87.7 94.5
footwearLeatherShoes 81.7 87.3 85.3 90.2 72.3 87.8 89.8 95.7
hairLong 72.8 88.9 88.1 91.3 76.5 88.3 90.6 95.6
personalMale 81.4 89.9 84.3 88.9 74.8 87.0 91.7 95.8
carryingMessengerBag 75.5 82.0 79.6 84.5 58.3 70.7 82.0 89.8
accessoryMuffler 91.3 96.1 97.2 98.8 88.4 93.6 94.5 96.2
accessoryNothing 80.0 85.8 86.1 89.0 52.6 71.5 86.1 92.1
carryingNothing 71.5 83.1 80.1 84.5 55.2 71.8 83.1 91.3
carryingPlasticBags 75.5 87.0 93.5 96.6 67.3 83.6 86.0 92.2
footwearShoes 73.6 80.0 75.8 80.8 52.8 68.3 81.6 89.4
upperBodyShortSleeve 71.6 87.5 88.1 90.7 69.2 86.2 89.2 94.5
footwearSneaker 69.3 78.7 81.8 85.7 52.0 73.0 83.2 92.0
lowerBodyTrousers 76.5 84.3 76.3 83.4 56.2 75.2 84.2 92.0
upperBodyTshirt 64.2 83.0 90.6 93.3 63.5 82.7 88.7 92.8
upperBodyOther 83.9 86.1 82.0 86.2 73.2 80.8 88.5 93.5
27 attributes average 75.8 85.4 86.6 90.0 65.6 79.9 87.0 93.0
35 attributes in (Deng
et al., 2014; Li et al.,
2015) average
71.1 82.6 91.7 78.9 92.0
45 attributes in (Zhu
et al., 2017) average
87.2 90.7 67.3 82.3 87.7 93.8
53 attributes average 91.7 81.3 93.0
5 CONCLUSION
In this paper, a pedestrian attribute classification ap-
proach based on deep learning has been proposed.
Our approach applies 1D convolutions on part-based
feature map and fuses low-level LOMO features and
high-level learnt CNN features to construct an effec-
tive classifier that is robust to large view point and
pose variations. We proved that the learned CNN fea-
tures and the hand craft LOMO features are comple-
mentary and the fusion improves the attribute recog-
nition results. We also showed that pre-training the
CNN model on person re-identification can assist at-
tribute learning for small datasets. Finally, in our ex-
periments on three public benchmarks, the proposed
approach showed superior performance compared to
the state of the art.
ACKNOWLEDGEMENTS
This work was supported by the Group Image Min-
ing (GIM) which joins researchers of LIRIS Lab. and
THALES Group in Computer Vision and Data Min-
ing. We thank NVIDIA Corporation for their gener-
ous GPU donation to carry out this research.
REFERENCES
Chen, Y., Duffner, S., Stoian, A., Dufour, J.-Y., and Baskurt,
A. (2017). Triplet cnn and pedestrian attribute recog-
nition for improved person re-identification. In Pro-
ceedings of the IEEE International Conference on Ad-
vanced Video and Singal based surveillance.
Deng, Y., Luo, P., Loy, C. C., and Tang, X. (2014). Pedes-
trian attribute recognition at far distance. In Proc.
of the ACM international conference on Multimedia,
pages 789–792.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
120
Table 4: Attribute recognition results on VIPeR (in %).
Attributes
Accuracy Recall@FPR=0.2 AUC
svm(Layne
et al., 2012)
mlcnn-p(Zhu
et al., 2015)
ours svm(Layne
et al., 2012)
mlcnn-p(Zhu
et al., 2015)
ours ours
redshirt 85.5 91.9 94.4 88.4 88.9 95.9 95.2
blueshirt 73.0 69.1 91.5 60.8 70.8 75.5 83.1
lightshirt 83.7 83.0 84.4 87.8 85.3 88.2 91.7
darkshirt 84.2 82.3 83.3 87.5 85.8 86.1 90.9
greenshirt 71.4 75.9 96.2 54.3 69.4 84.6 88.7
nocoat 70.6 71.3 74.2 59.3 57.2 65.4 80.4
notlightdarkjean 70.3 90.7 96.7 57.2 78.6 80.0 86.0
darkbottoms 75.7 78.4 78.9 70.2 76.2 74.9 85.7
lightbottoms 74.7 76.4 76.5 69.5 73.3 72.3 83.6
hassatchel 47.8 57.8 70.9 22.0 31.7 39.1 64.8
barelegs 75.6 84.1 92.2 68.7 85.4 92.2 92.8
shorts 70.4 81.7 92.3 59.8 82.9 87.3 88.6
jeans 76.4 77.5 80.6 72.7 74.7 81.7 87.6
male 66.5 69.6 74.7 48.2 57.2 67.9 82.1
skirt 63.6 78.1 94.3 40.7 60.7 61.3 72.8
patterned 46.9 57.9 90 26.3 41.0 49.9 68.1
midhair 64.1 76.1 75.2 43.0 63.5 54.1 73.1
darkhair 63.9 73.1 67.5 39.6 58.4 49.7 71.9
hashandbagcarrierbag 45.3 42.0 90.9 17.4 18.5 27.5 55.1
hasbackpack 67.5 64.9 72.7 47.9 49.9 57.4 76.3
average 68.9 74.1 83.9 56.1 65.5 69.6 80.9
Ding, S., Lin, L., Wang, G., and Chao, H. (2015). Deep
feature learning with relative distance comparison
for person re-identification. Pattern Recognition,
48(10):2993–3003.
Duan, K., Parikh, D., Crandall, D., and Grauman, K.
(2012). Discovering localized attributes for fine-
grained recognition. In Proc. of the IEEE Interna-
tional Conference on Computer Vision and Pattern
Recognition (CVPR), pages 3474–3481.
Gray, D., Brennan, S., and Tao, H. (2007). Evaluating ap-
pearance models for recognition, reacquisition, and
tracking. In Proc. of International Workshop on Per-
formance Evaluation for Tracking and Surveillance
(PETS).
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Proc. of Advances in neural information
processing systems (NIPS), pages 1097–1105.
Kumar, N., Berg, A. C., Belhumeur, P. N., and Nayar, S. K.
(2009). Attribute and simile classifiers for face veri-
fication. In Proc. of the International Conference on
Computer Vision (ICCV), pages 365–372.
Layne, R., Hospedales, T. M., and Gong, S. (2014).
Attributes-based re-identification. In Person Re-
Identification, pages 93–117. Springer.
Layne, R., Hospedales, T. M., Gong, S., and Mary, Q.
(2012). Person re-identification by attributes. In Proc.
of the British Machine Vision Conference (BMVC),
page 8.
Lefebvre, G. and Garcia, C. (2013). Learning a bag of
features based nonlinear metric for facial similarity.
In Advanced Video and Signal Based Surveillance
(AVSS), 2013 10th IEEE International Conference on,
pages 238–243. IEEE.
Li, D., Chen, X., and Huang, K. (2015). Multi-attribute
learning for pedestrian attribute recognition in surveil-
lance scenarios. Proc. of the Asian Conference on Pat-
tern Recognition (ACPR).
Li, H., Chen, J., Lu, H., and Chi, Z. (2017). Cnn for saliency
detection with low-level feature integration. Neuro-
computing, 226:212–220.
Li, W., Zhao, R., Xiao, T., and Wang, X. (2014). Deep-
reid: Deep filter pairing neural network for person re-
identification. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
152–159.
Liao, S., Hu, Y., Zhu, X., and Li, S. Z. (2015). Person re-
identification by local maximal occurrence represen-
tation and metric learning. In Proc. of the IEEE Inter-
national Conference on Computer Vision and Pattern
Recognition (CVPR), pages 2197–2206.
Liao, S., Zhao, G., Kellokumpu, V., Pietik
¨
ainen, M., and
Li, S. Z. (2010). Modeling pixel process with scale
invariant local patterns for background subtraction in
complex scenes. In Proc. of the IEEE International
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 1301–1306.
Liu, J., Kuipers, B., and Savarese, S. (2011). Recognizing
human actions by attributes. In Proc. of the IEEE In-
ternational Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 3337–3344.
Lumini, A., Nanni, L., and Ghidoni, S. (2016). Deep
featrues combined with hand-crafted features for face
recognition. International Journal of Computer Re-
search, 23(2):123.
Pedestrian Attribute Recognition with Part-based CNN and Combined Feature Representations
121

Srivastava, N., Hinton, G. E., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: a simple way
to prevent neural networks from overfitting. Journal
of machine learning research, 15(1):1929–1958.
Tian, Y., Luo, P., Wang, X., and Tang, X. (2015). Pedestrian
detection aided by deep learning semantic tasks. In
Proc. of the IEEE International Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
5079–5087.
Vaquero, D. A., Feris, R. S., Tran, D., Brown, L., Ham-
papur, A., and Turk, M. (2009). Attribute-based peo-
ple search in surveillance environments. In Proc.
of Workshop on Applications of Computer Vision
(WACV), pages 1–8.
Varior, R. R., Haloi, M., and Wang, G. (2016). Gated
siamese convolutional neural network architecture for
human re-identification. In Proc. of the IEEE Interna-
tional Conference on European Conference on Com-
puter Vision (ECCV), pages 791–808.
Wang, J., Song, Y., Leung, T., Rosenberg, C., Wang, J.,
Philbin, J., Chen, B., and Wu, Y. (2014). Learning
fine-grained image similarity with deep ranking. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 1386–1393.
Wu, S., Chen, Y.-C., Li, X., Wu, A.-C., You, J.-J., and
Zheng, W.-S. (2016). An enhanced deep feature rep-
resentation for person re-identification. In IEEE Win-
ter Conference on Applications of Computer Vision
(WACV), pages 1–8. IEEE.
Zhu, J., Liao, S., Lei, Z., and Li, S. Z. (2014). Improve
pedestrian attribute classification by weighted interac-
tions from other attributes. In Asian Conference on
Computer Vision, pages 545–557.
Zhu, J., Liao, S., Lei, Z., and Li, S. Z. (2017). Multi-
label convolutional neural network based pedestrian
attribute classification. Image and Vision Computing,
58:224–229.
Zhu, J., Liao, S., Lei, Z., Yi, D., and Li, S. Z. (2013). Pedes-
trian attribute classification in surveillance: Database
and evaluation. In Proc. of the International Confer-
ence on Computer Vision (ICCV) Workshops, pages
331–338.
Zhu, J., Liao, S., Yi, D., Lei, Z., and Li, S. Z. (2015). Multi-
label cnn based pedestrian attribute learning for soft
biometrics. In Proc. of the International Conference
on Biometrics(ICB), pages 535–540.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
122
