
A Modular Approach for Parallel Simulation of Virtual
Testbed Applications
Arthur Wahl, Ralf Waspe, Michael Schluse and Juergen Rossmann
Institute for Man-Machine Interaction, RWTH Aachen University, Ahornstare 55, Aachen, Germany
Keywords:
Parallel Simulation, Virtual Testbeds, Synchronization, Scheduling.
Abstract:
Virtual Testbeds are advanced 3D simulation environments that model all relevant aspects of complex technical
systems, to enable their systematic evaluation by engineers from various disciplines. Due to the high complex-
ity of the resulting simulation, real-time capabilities are very hard to achieve without applying multi-threading
strategies. Therefore, we present a novel, simulation architecture that facilitates a modular approach to per-
form parallel simulations of arbitrary environments without further effort. Specifically, no explicit knowledge
of the underlying simulation algorithms or model partitioning is needed. As a result, engineers can simply
distribute simulation components such as rigid-body dynamics, kinematics, renderer, controllers etc. among
different threads without being concerned about the specific technical realization. We achieve this by man-
aging (partial) copies of the state data underlying the simulation models. Each copy acts as a self-contained,
independent entity and is bound to one thread.
1 INTRODUCTION
Virtual Testbeds (VT) greatly enhance the scope of
the classical simulation approach. While typical sim-
ulation applications examine only specific aspects
of an application, a VT enables development engi-
neers to examine the entire system in its environ-
ment and provides a holistic view of the dynamic
overall system including internal inter-dependencies
in a user-defined granularity. In contrast to the clas-
sical bottom-up-strategy this can be seen as a top-
down-approach. For classical fields of application of
robotics, e.g. in production plants with a well-defined
environment, a bottom-up-strategy in the develop-
ment of simulation models is the approved method,
because it allows very detailed insights into the ana-
lyzed subsystems. On the other hand, unpredictable
effects of the interaction of multiple subsystems may
easily be overseen. In particular, when it comes to
building larger applications like for example a space
robot mission as shown in Figure 1, planetary land-
ing or exploration, autonomous working machines,
advanced vehicle assistant systems, forestry applica-
tion etc. as presented in the Virtual Robotics Testbed
(Rossmann and Schluse, 2011), they are hard to de-
scribe in an analytical way in order to integrate them
into an analytical simulation model and the demand
for highly realistic and collaborative simulation envi-
ronments increases.
Figure 1: Virtual Robotic Testbed for space environments.
VTs pose new challenges in the field of parallel simu-
lation compared to the classical simulation approach.
They demand the development of a parallel simula-
tion architecture that encompasses arbitrary applica-
tion fields of VTs. Therefore, the concurrent execu-
tion of multiple simulations algorithms with differ-
ent degrees of granularity must be supported. This
will enable the simulation to incorporate various as-
pects of an application with different degrees of de-
tail at the same time. Furthermore, the partitioning
scheme provided to distribute the simulation among
different threads must enable an engineer to gener-
ate partitions that are scalable and adaptable during
the development or creation phase of a VT applica-
tion e.g. an engineer can add new functionality or
components to an existing simulation model to inves-
Wahl, A., Waspe, R., Schluse, M. and Rossmann, J.
A Modular Approach for Parallel Simulation of Virtual Testbed Applications.
DOI: 10.5220/0006438302550262
In Proceedings of the 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2017), pages 255-262
ISBN: 978-989-758-265-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
255

tigate additional aspects of an application. A partition
must provide the possibility to include these new ex-
tensions. As a consequence, the integration of new
simulation algorithms must also be supported. Re-
garding the amount of different simulation algorithms
provided by a VT, an explicit parallelization of each
simulation algorithm would require specific knowl-
edge about the algorithms and their internal depen-
dencies, provide no scalability and therefore present
an inappropriate approach.
We present a novel parallel simulation architecture
for arbitrary VT applications that fulfills the afore-
mentioned requirements. The architecture generates
low synchronization overhead during parallel execu-
tion and facilitates a modular distribution of a sim-
ulation among different threads without further ef-
fort. We follow a top-down-approach like the VT ap-
proach itself and propose the application of a func-
tional partitioning scheme that distributes simulation
algorithms among different threads. As shown in Fig-
ure 2, simulation algorithms or components of a VT
such as rigid-body dynamics, kinematics, renderer,
controllers etc. can simply be assigned by an engi-
neer to a specific thread and executed concurrently.
Hereby, no explicit knowledge of the underlying al-
gorithms is required or model partitioning is needed
to perform parallel executions of a simulation. The
modular distribution provides scalability since paral-
lel execution scales with the number of components
provided by a simulation model and partitions can be
extended during the development phase by newly in-
cluded components.
Execution of the simulation components is han-
dled by a scheduler. Each thread owns a scheduler,
where components can register and be executed cor-
respondingly to their execution rate. The execu-
tion rate can be chosen individually for each com-
Figure 2: Example distribution of simulation components.
ponent, similar to the approach presented in (Fried-
mann et al., 2008) for the simulation of autonomous
mobile-robots teams. Components can be executed
safely in parallel among different threads without in-
terfering with each other. We achieve this by manag-
ing (partial) copies of the state data underlying the
simulation models. The state data is organized in
an active object oriented graph database and repre-
sents the current state of the simulation model at a
given time-step. Each copy of the database acts as
a self-contained, independent entity and is bound to
one thread. All components assigned to one thread,
work on the same copy of the database and are exe-
cuted sequentially. Components cannot access or ma-
nipulate (no read/write access) the database of differ-
ent threads and therefore can be executed safely in
parallel without interfering with each other. Interac-
tion between components among different threads is
handled during a synchronization step. Our approach
introduces a conservative synchronization algorithm
with variable lookahead. Each scheduler can oper-
ate under a different lookahead (synchronization in-
terval), depending on the execution rate of its slow-
est component. A change detection mechanism keeps
track of changes that have occurred during a time-
step. These changes represent the progress of each
component and are used to update all databases to at-
tain a consistent global simulation state.
2 RELATED WORK
In the context of simulation systems, replication has
been exploited in order to evaluate simulation out-
comes or to find optimal parameter settings to im-
prove the accuracy of simulation results (Glasserman
et al., 1996; Mota et al., 2000; Forlin et al., 2010).
The approach is to run multiple independent copies of
the same simulation program in parallel with different
input parameters. At the end of the runs the results
are averaged. This approach has been named Mul-
tiple Replication in Parallel (MRIP) (Pawlikowski
et al., 1994). Furthermore, MRIP has been applied
in stochastic simulations. Stochastic simulations re-
quire the execution of multiple replicated simulation
runs in order to build confidence intervals for their
results (Passerat-Palmbach et al., 2015). MRIP has
been applied to accelerate the building process (Eick-
hoff, 2007; Ballarini et al., 2009; Ewald et al., 2009).
This type of concurrent replication is not aimed at
increasing the execution speed of each single run,
but is aimed at efficiently providing a set of output
samples by the concurrent execution of multiple in-
dependent differently parametrized sequential simu-
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
256

lation runs. Bononi et. al. introduced an approach
that combines the concurrent execution of replicas
with a parallel discrete event simulation by merging
the execution tasks of more than one parallel simu-
lation replica (Bononi et al., 2005). Hereby, block-
ing (idle CPU time) can be avoided during the syn-
chronization barrier phase of a conservative parallel
simulation (processes wait on the completion of more
computational intensive processes) by switching to
the execution of other replicas which already com-
pleted their synchronization phase. Parallel simula-
tion cloning, another approach aimed at introducing
replication in the context of parallel simulation was
first employed by Hybinette and Fujimoto as a con-
current evaluation mechanism for alternate simulation
scenarios (Hybinette and Fujimoto, 1997). The aim
of this approach is to allow fast exploration of mul-
tiple execution paths, due to sharing of portions of
the computation on different paths. Parts of the sim-
ulation (logical processes) can be cloned during the
simulation at predefined decision points. From then
on, the original process and the clones execute along
different execution paths in parallel, hence execution
paths before cloning are shared.
Opposed to replication and cloning, our approach
uses multiple independent copies of the state data (or-
ganized in an active object oriented graph database)
underlying the simulation model that all participate in
the parallel execution of one simulation run. Through
the utilization of state data copies, simulation compo-
nents can be executed safely in parallel among dif-
ferent threads without interfering with each other.
OpenSG (an open source project for portable scene-
graph systems) uses a similar multi buffer approach,
where partial copies of the scenegraph structure are
used to introduce multi-threading (Voß et al., 2002;
Roth et al., 2004). The highly modular nature of such
an architecture allows for the accommodation of mul-
tiple projects with varying requirements and presents
the ideal basis for the development of arbitrary paral-
lel VT applications.
3 ACTIVE REAL-TIME
SIMULATION DATABASE
A key component for our Virtual Testbed is the ver-
satile simulation database (VSD), which is an active
object-oriented, self-reflecting graph database, as in-
troduced in (Roßmann et al., 2013). The VSD rep-
resents the core of our simulation architecture. The
function of the core is to store the structure and state
of the simulation upon which integrated simulation
components will act on.
Besides information about the logical and spatial
arrangement of a 3D scenes, as given by a scenegraph,
our database approach also incorporates functionality
in form of integrated simulation components, flexi-
bly adopts to multiple data schemes, is independent
from the type of simulation (continuous or discrete)
and provides all the data needed for simulating VT
applications. In addition, each database copy offers
an efficient change detection mechanism that collects
all the changes that have happed to a database during
one simulation time-step. Synchronization (restoring
a global consistent simulation state among all copies),
thereby is reduced to the distribution of such changes
among all database copies.
4 MODULAR PARALLEL
SIMULATION OF VIRTUAL
TESTBEDS
We introduce a parallel simulation approach that
meets the challenges presented by VT architectures.
The approach must be applicable to arbitrary applica-
tion fields of VT, facilitate the concurrent execution of
multiple simulation algorithms with different degrees
of granularity and allow for scalability as well as the
integration of new algorithms. VTs are composed of a
variety of different integrated simulation components
such as rigid-body dynamics, kinematics, sensors, ac-
tuators, renderer etc. which can be regarded as logi-
cal, independent processes. We propose a partitioning
scheme that utilizes the modular VT structure and par-
tition applications along their simulation components.
We follow the top-down-approach and distribute sim-
ulation components among simulation threads for par-
allel execution.
4.1 Simulation Thread
A simulation thread owns a scheduler, a time con-
troller, a (partial) copy of the main VSD and a unique
context id e.g. ”simulation thread 1-n”. Components
can be assigned by a development engineer to a sim-
ulation thread by choosing a thread specific context
id and hereby activating their execution through the
corresponding scheduler. A scheduler executes only
components with a matching context id. The execu-
tion rate can be chosen individually for each compo-
nent. Components assigned to one simulation thread
are executed sequentially. The execution order is
given by the execution rate of the individual compo-
nents. In consequence, the execution order of a set
generated by sequential simulation run is also main-
A Modular Approach for Parallel Simulation of Virtual Testbed Applications
257

Figure 3: Simulation architecture.
tained by a simulation thread during parallel execu-
tion. A distinction must be made between sequences
of components which have to be executed in a pre-
defined order and sequences which are not dependent
from the execution order. Sequences which have to be
executed in a predefined order can only be assigned
to one thread, to preserve that order. A time con-
troller of a simulation thread provides multi-thread
safe functionality to start, stop and pause a scheduler.
The controller keeps track of how the simulation-time
progresses compared to the wall-time. The execu-
tion of the next scheduling interval can be paused by
the time controller, if the simulation time progresses
faster than the wall-time. In return, if simulation time
progresses slower, the time controller provides the
possibility to skip rendering as well as execution cy-
cles of components to catch up with the wall-time.
Our partitioning scheme facilitates the possibility to
spawn an individual simulation thread for each se-
quence, thus providing the scalability to exploit the
maximum number of cores on a CPU.
4.2 Simulation Architecture
We propose the following architecture, see Figure 3.
Four different types of controllers can be assigned
to a simulation thread: a time controller for multi-
thread execution, a time controller for rendering, a
time controller for the GUI update of the simulation
system and a time controller for sequential execution.
Each time controller controls the execution of a cor-
responding scheduler. Both time controller types for
parallel and sequential execution are derived from ab-
stract classes that provide functionality to start, stop
and pause a scheduler as well as to monitor how
simulation-time progresses compared to wall-time. A
simulation task scheduler can either be controlled by
a corresponding time controller during parallel or se-
quential execution. Tasks with rendering content are
executed by a render scheduler. A render scheduler
determines the render update rate and is responsible
for updating all transformation matrices of the ap-
plications geometry before rendering the scene. The
GUI update of the simulation system is handled by
the GUI scheduler. Responsiveness of the applica-
tion can be achieved by solely handling GUI event
updates in the main thread. All scheduler classes are
derived from an abstract base class. The abstract base
class provides functionality to manage the execution
of simulation tasks, handle synchronization and holds
a reference to the corresponding time controller. The
architecture presented here is capable of concurrently
executing distributed render and non-render simula-
tion components among multiple simulation threads.
4.3 Configuration of Simulation
Threads
The creation of multiple independent simulation
databases, that each facilitates all the data and func-
tionality needed for simulation, represents the core
idea of our parallel simulation approach. Each simu-
lation thread has the ability to execute an independent,
autonomous part of the whole simulation. All compo-
nents assigned to one thread, work on the same copy
of the VSD. This ensures that access to the VSD of a
simulation thread only happens successively by com-
ponents that share the same context. Typical prob-
lems like simultaneous data access, race conditions
etc. that come along with multi-threading are being
avoided because components from different threads
do not share the same VSD but hold their own copy.
The approach presented here, provides the abil-
ity to create complex configurations of simulation
threads. An example configuration for parallel sim-
ulations of on-orbit satellite servicing applications,
as presented in the Virtual Space Robotics Testbed
(Rossmann et al., 2016) is shown in Figure 4.
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
258
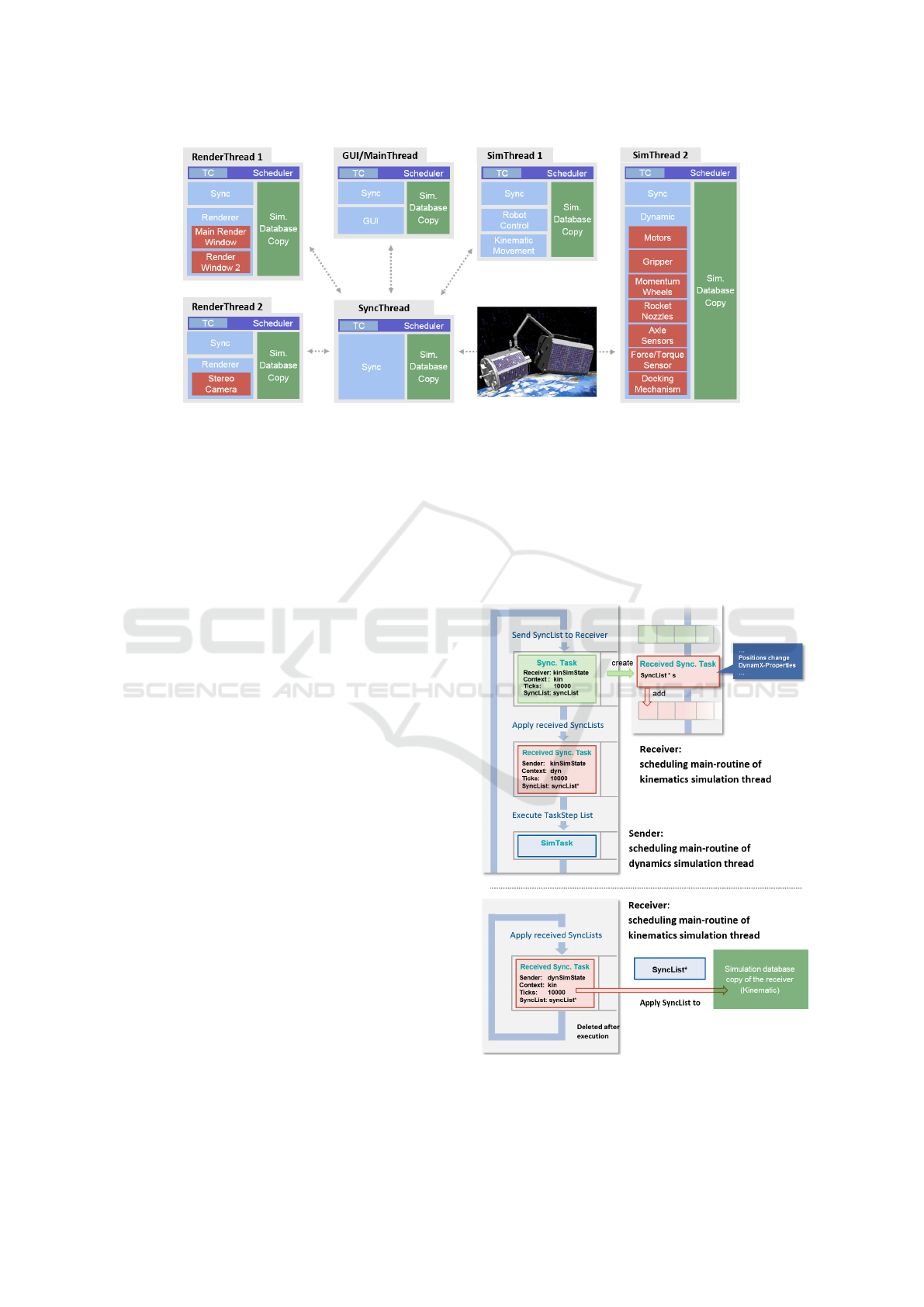
Figure 4: Modular parallel simulation of an on-orbit satellite servicing scenario.
5 SYNCHRONIZATION
To achieve correctness of parallel executed simula-
tion runs, synchronization across the processors is re-
quired. The goal is to ensure that a parallel execution
of a simulation produces the same result as an equiv-
alent sequential execution. Therefore, dependencies
have to be preserved among partitions and events as
well as intermediate results have to be processed in
the right order during the computation of the simu-
lation state across the processors to attain a global,
consistent simulation state. Assuming that the sim-
ulation consists of a collection of logical processes
that resulted from a partition scheme and that the
logical processes communicate by exchanging times-
tamped messages or events, this can be achieved dur-
ing synchronization by preserving the local causality
constraint (Fujimoto, 2001). The local causality con-
straint states that in order to achieve identical simula-
tion results, each logical process or partition must pro-
cess events in non-decreasing time-stamp order. As a
consequence results are also repeatable.
Our approach introduces a conservative synchro-
nization architecture with variable lookahead (syn-
chronization interval). Each scheduler can operate
under a different lookahead, depending on the exe-
cution of its slowest component. A change detec-
tion mechanism keeps track of changes that have oc-
curred during a time-step. These changes represent
the progress of each component and are used to up-
date all VSDs.
5.1 Synchronization Architecture
The change detection mechanism of the VSD stores
changes inside a list (synclist). The synclist repre-
sents the difference between the actual and the last
simulation state. It can be used to update other VSDs.
Synchronization is realized through the exchange and
application of synclists. A VSD can connect to an-
other VSD, it is interested in receiving updates from,
by enabling a synchronization connection. Therefore,
we introduce the following communication mecha-
nism, see Figure 5.
Figure 5: Synchronization architecture.
A synchronization connection is a sender/receiver-
relation between two VDSs. Communication is done
A Modular Approach for Parallel Simulation of Virtual Testbed Applications
259
via synchronization tasks that function as containers
for the synclists to be sent. These task are transmitted
and executed during the synchronization phase of the
scheduling main-routine, before the next simulation
time-step starts. After establishing the synchroniza-
tion connections, each sender scheduler possesses a
list of synchronization tasks, containing all receiver
references and the necessary information to transmit
synclists to them. The list is processed during each
scheduling-cycle of the sender scheduler. Hereby, the
current synclist of the sender VSD together with the
current time-step of the sender scheduler are passed
to the receiver scheduler. This is done by creating
a new synchronization task containing the aforemen-
tioned information and inserting the task into the cor-
responding task-list of the receiver scheduler. That
way, the receiver does not have to halt immediately
when receiving a synchronization task. The execu-
tion of simulation components is not influenced by the
broadcast of synchronization tasks. The receiver con-
tinues the execution of simulation components and
only processes received synchronization tasks when
the scheduling-routine arrives at that processing step.
In return, a sender with a lower scheduling time-
step than the receiver can perform unimpeded, mul-
tiple scheduling cycles and send multiple synclists to
the receiver while the receiver may still be process-
ing simulation components until both reach the same
time-step. The received synchronization tasks are ap-
plied in time-stamp order and the simulation state of
the receiver VSD is updated by applying all synclists.
Pursuing this strategy allows an independent execu-
tion of sender and receiver schedulers with different
time-steps until both schedulers reach the same time-
step and the synchronization algorithm is applied to
ensure that the causality constraint is not violated.
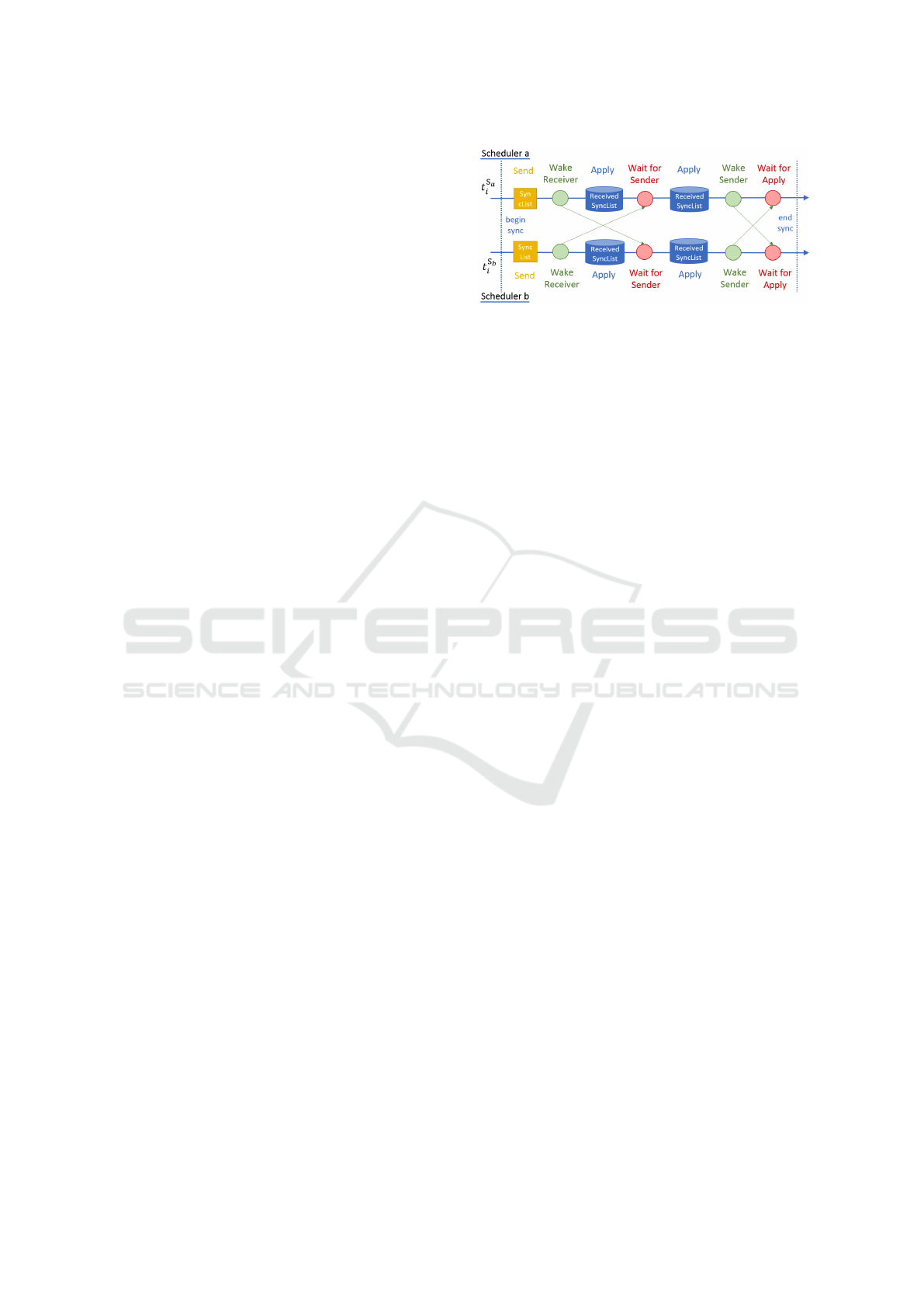
5.2 Synchronization Algorithm
Simulation threads can be paused during the synchro-
nization phase of the scheduling main-routine. Sender
and Receiver schedulers have to wait either for the
dispatch or application of synchronization tasks if
they progress faster than other schedulers that partic-
ipate in the synchronization process. Because a syn-
clist only contains references to changed items in the
VSD, a sender scheduler always has to wait until all
connected receivers with a smaller time-step have fin-
ished applying the synclist. We propose the following
synchronization sequence, see Figure 6.
A scheduler starts the synchronization process and
the main-routine by sending the current synclist con-
taining all changes from the last scheduling time-step
(t
scheduler
i−1
) to its receivers. Hereby, receivers are wo-
Figure 6: Synchronization sequence.
ken up that have waited on receiving that synclist.
Next the scheduler processes the synclists received
so far in time-stamp order (t
synclist
i
< t
scheduler
i
). Af-
ter the first processing step, the scheduler checks if it
has progressed faster than the remaining senders. If
the scheduler has progressed faster, it has to wait until
all senders have advanced sufficiently and transmit-
ted their synclists up to the current time-step of that
scheduler. The scheduler is immediately woken up as
soon as a synclist arrives and starts processing it. In
the last step of synchronization process the scheduler
itself waits on the application of all transmitted syn-
clists and is woken up as soon as the last receiver has
applied the transmitted synclists.
Processing synchronization tasks in the sequence
presented here, guarantees that synchronization tasks
are not processed out of time-stamp order, that syn-
chronization tasks do not contain future VSD changes
and that no synchronization tasks are missed during a
scheduling-cycle. All changes contained by the re-
ceived synclists are applied during one time-step in
exact the same order to the VSD of a receiver as
they happened in the original VSDs of the senders.
Hereby, the causality constraint is preserved and re-
peatable as well as identical results are produced dur-
ing the parallel execution.
6 RESULTS / VALIDATION
The modular parallel simulation architecture pre-
sented here is still under development. First results
are very promising regarding the performance. We
tested several scenarios of the Virtual Space Robotics
Testbed with different simulation component distri-
bution configurations. In all cases the average perfor-
mance during parallel execution met the desired out-
come predicted by our partitioning scheme. The av-
erage performance was mainly dependent on the total
execution time of the distributed components of the
slowest thread. Our approach is capable of achiev-
ing performance gains that scale with the number of
threads, as shown for the following scenario.
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
260

We choose a configuration of three simulation
threads (see figure 7) each connected with each other
by synchronization connections for the parallel simu-
lation of a modular satellite reconfiguration scenario
where a chaser satellite is docked to a satellite com-
posed of individual building blocks (Weise et al.,
2012) and utilizes robotic manipulators to exchange
malfunctioning components.
Figure 7: Modular parallel simulation of a satellite recon-
figuration scenario.
During the parallel simulation of this scenario, we
achieved a constant speed-up factor of 2.8 (see fig-
ure 8). Synchronization overhead was very low, on
the average around 250 microseconds, while the ex-
ecution time of the main components was within the
range of milliseconds, see Figure 8. Despite the harsh
execution times, in the range of a few milliseconds,
our approach was capable of achieving a stable and
constant speed-up during each simulation time-step,
resulting in a linear progression of simulation time.
Memory usage increased by 40.5 MB per VSD copy
from initially 734 MB (consisting of: 444 MB for
the simulation model and 290 MB for the simulation
architecture including all components of the Virtual
Space Robotics Testbed) to 815 MB after two addi-
tional VSD copies were generated for the configura-
tion presented above and the simulation was started.
Model geometries and textures were shared among
the simulation threads. Due to the processing of syn-
chronization tasks in time-stamp order, the parallel
simulation of this scenario produced repeatable and
identical results compared to the equivalent sequen-
tial execution. The results were generated on a Intel
Core i7-3930k multi-core CPU with 6 physical cores
at 4.1GHz and 16GB of RAM.
7 CONCLUSION / FUTURE
WORK
We introduced a parallel simulation approach that ad-
dresses the challenges posed by VTs and developed a
parallel simulation architecture that presents an ideal
platform for further research regarding the parallel ex-
ecution of arbitrary VT applications. Scalability is
provided by the functional partitioning scheme that
allows a modular distribution of various simulation
components among threads. The scheduler based
simulation architecture facilitates the concurrent exe-
cution of multiple distributed simulations algorithms
with different degrees of granularity. Distributed
components are executed safely in parallel without in-
terfering with each other, due to the utilization and
assignment of independent VSD copies to simula-
tion threads. Each VSD copy facilitates all the data
and functionality needed for simulation. The change
detection mechanisms provides an efficient distribu-
tion method of VSD updates among the simulation
threads. In addition, the synchronization architecture
allows an independent execution of sender and re-
ceiver schedulers. As a result, our approach generates
low synchronization overhead and provides speed-ups
that are scalable with the number of utilized threads
during parallel execution.
Regarding the scalability during parallel execu-
tion, our modular approach is limited by the number
of simulation components provided by an VT appli-
cation. In future, we would like to investigate further
partitioning schemes for VT applications to increase
the scalability of our approach. Our functional par-
titioning scheme could be extended by a spatial par-
titioning to generate more complex configurations of
distributed VT components. Furthermore we would
like to investigate the application of computational
load balancing strategies to realize an automatic dis-
tribution of components among all simulation threads
during parallel execution.
ACKNOWLEDGMENTS
Parts of this work were developed in the context of
the research project ViTOS. Supported by the Ger-
man Aerospace Center (DLR) with funds of the Ger-
man Federal Ministry of Economics and Technology
(BMWi), support code 50 RA 1304.
REFERENCES
Ballarini, P., Forlin, M., Mazza, T., and Prandi, D. (2009).
Efficient parallel statistical model checking of bio-
chemical networks. arXiv preprint arXiv:0912.2551.
Bononi, L., Bracuto, M., D’Angelo, G., and Donatiello, L.
(2005). Concurrent replication of parallel and dis-
tributed simulations. In Principles of Advanced and
A Modular Approach for Parallel Simulation of Virtual Testbed Applications
261
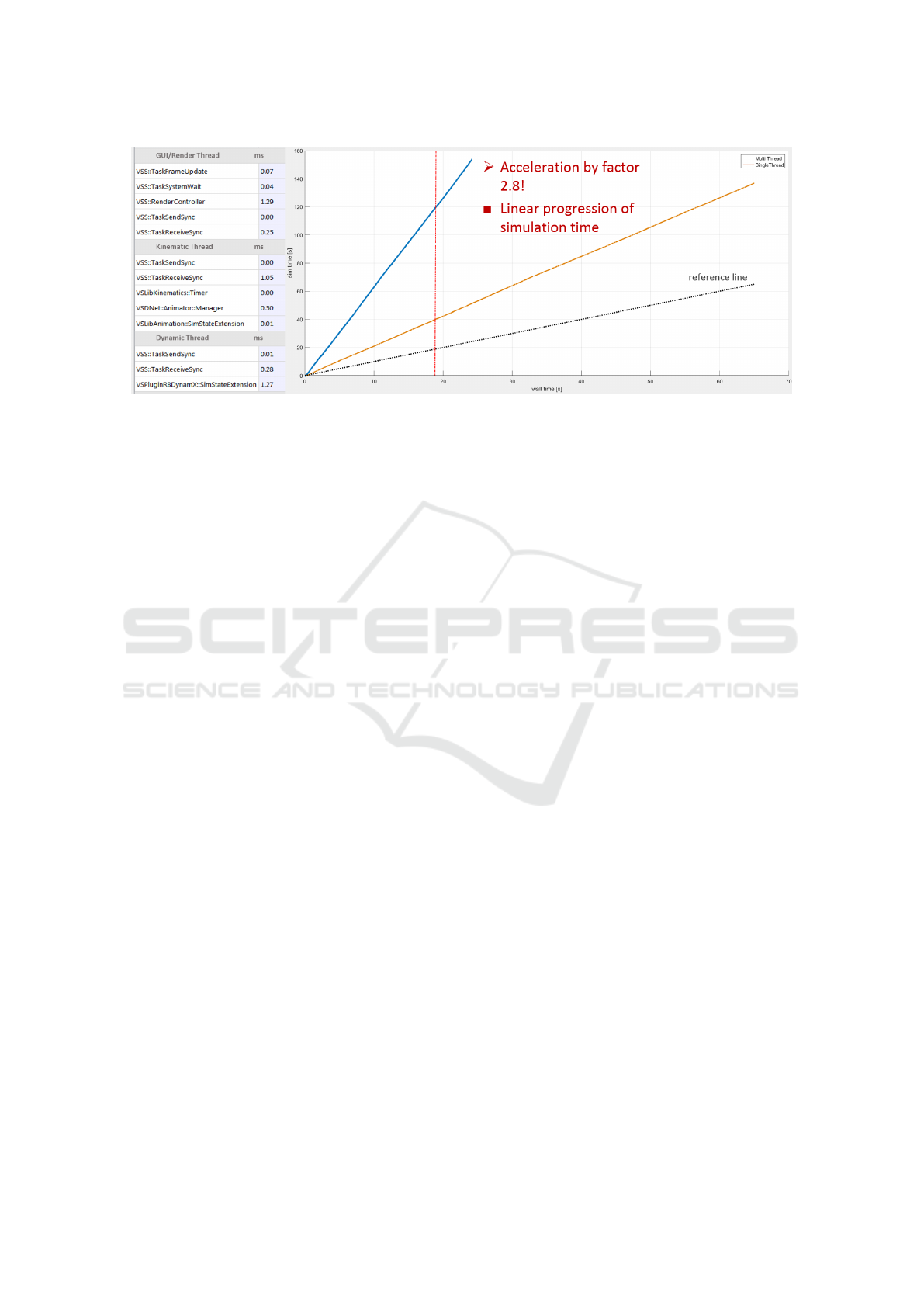
Figure 8: Performance measurements and execution times of the satellite reconfiguration scenario.
Distributed Simulation, 2005. PADS 2005. Workshop
on, pages 234–243. IEEE.
Eickhoff, M. (2007). Sequential Analysis of Quantiles and
Probability Distributions by Replicated Simulations.
PhD thesis, University of Canterbury.
Ewald, R., Leye, S., and Uhrmacher, A. M. (2009). An
efficient and adaptive mechanism for parallel simula-
tion replication. In Principles of Advanced and Dis-
tributed Simulation, 2009. PADS’09. ACM/IEEE/SCS
23rd Workshop on, pages 104–113. IEEE.
Forlin, M., Mazza, T., and Prandi, D. (2010). Predicting
the effects of parameters changes in stochastic models
through parallel synthetic experiments and multivari-
ate analysis. In Parallel and Distributed Methods in
Verification, 2010 Ninth International Workshop on,
and High Performance Computational Systems Biol-
ogy, Second International Workshop on, pages 105–
115. IEEE.
Friedmann, M., Petersen, K., and von Stryk, O. (2008).
Simulation of multi-robot teams with flexible level
of detail. In International Conference on Simulation,
Modeling, and Programming for Autonomous Robots,
pages 29–40. Springer.
Fujimoto, R. M. (2001). Parallel simulation: parallel and
distributed simulation systems. In Proceedings of the
33nd conference on Winter simulation, pages 147–
157. IEEE Computer Society.
Glasserman, P., Heidelberger, P., Shahabuddin, P., and Za-
jic, T. (1996). Splitting for rare event simulation:
Analysis of simple cases. In Proceedings of the 28th
Conference on Winter Simulation, WSC ’96, pages
302–308, Washington, DC, USA. IEEE Computer So-
ciety.
Hybinette, M. and Fujimoto, R. (1997). Cloning: a novel
method for interactive parallel simulation. In Pro-
ceedings of the 29th conference on Winter simulation,
pages 444–451. IEEE Computer Society.
Mota, E., Wolisz, A., and Pawlikowski, K. (2000). A per-
spective of batching methods in a simulation environ-
ment of multiple replications in parallel. In Proceed-
ings of the 32Nd Conference on Winter Simulation,
WSC ’00, pages 761–766, San Diego, CA, USA. So-
ciety for Computer Simulation International.
Passerat-Palmbach, J., Caux, J., Siregar, P., Mazel, C., and
Hill, D. (2015). Warp-level parallelism: Enabling
multiple replications in parallel on gpu. arXiv preprint
arXiv:1501.01405.
Pawlikowski, K., Yau, V. W., and McNickle, D. (1994). Dis-
tributed stochastic discrete-event simulation in paral-
lel time streams. In Proceedings of the 26th confer-
ence on Winter simulation, pages 723–730. Society
for Computer Simulation International.
Rossmann, J. and Schluse, M. (2011). Virtual robotic
testbeds: A foundation for e-robotics in space, in
industry-and in the woods. In Developments in E-
systems Engineering (DeSE), 2011, pages 496–501.
IEEE.
Rossmann, J., Schluse, M., Rast, M., and Atorf, L. (2016).
eRobotics combining electronic media and simula-
tion technology to develop (not only) robotics applica-
tions. In Kadry, S. and El Hami, A., editors, E-Systems
for the 21st Century – Concept, Developments, and
Applications, volume 2, chapter 10. Apple Academic
Press. ISBN: 978-1-77188-255-2.
Roßmann, J., Schluse, M., and Waspe, R. (2013). Combin-
ing supervisory control, object-oriented petri-nets and
3d simulation for hybrid simulation systems using a
flexible meta data approach. In SIMULTECH, pages
15–23.
Roth, M., Voss, G., and Reiners, D. (2004). Multi-threading
and clustering for scene graph systems. Computers &
Graphics, 28(1):63–66.
Voß, G., Behr, J., Reiners, D., and Roth, M. (2002). A
multi-thread safe foundation for scene graphs and its
extension to clusters. EGPGV, 2:33–37.
Weise, J., Briess, K., Adomeit, A., Reimerdes, H.-G., Gller,
M., and Dillmann, R. (2012). An intelligent build-
ing blocks concept for on-orbit-satellite servicing. In
Proc. International Symposium on Artificial Intelli-
gence Robotics and Automation in Space (iSAIRAS),
Turin, Italy.
SIMULTECH 2017 - 7th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
262
