
A Wise Object Framework for Distributed Intelligent Adaptive Systems
Ilham Alloui and Flavien Vernier
Univ. Savoie Mont Blanc, LISTIC, F-74000 Annecy, France
Keywords:
Object Oriented Design, Architecture Models, Adaptive Systems, Introspection, Decentralized Control.
Abstract:
Designing Intelligent Adaptive Distributed Systems is an open research issue addressing nowadays technolo-
gies such as Communicating Objects (COT) and the Internet of Things (IoT) that increasingly contribute to
our daily life (mobile phones, computers, home automation, etc.). Complexity and sophistication of those
systems make them hard to understand and to master by human users, in particular end-users and developers.
Those are very often involved in learning processes that capture all their attention while being of little interest
for them. To alleviate human interaction with such systems and help developers to produce them, we propose
WOF, an object oriented framework founded on the concept of Wise Object (WO). A WO is a software-based
entity that is able to learn on itself and also on the others (e.g. its environment). Wisdom refers to the experi-
ence (on its own behavior and on the usage done of it) such object acquires by its own during its life. In the
paper, we present the WOF conceptual architecture and the Java implementation we built from it. Require-
ments and design principles of wise systems are presented. To provide application (e.g. home automation
system) developers with relevant support, we designed WOF with the minimum intrusion in the application
source code. The adaptiveness, intelligence and distribution related mechanisms defined in WOF are inherited
by application classes. In our Java implementation of WOF, object classes produced by a developer inherit the
behavior of Wise Object (WO) class. An instantiated system is then a Wise Object System (WOS) composed
of wise objects that interact through an event bus according to publish-subscribe design pattern.
1 INTRODUCTION
Designing Intelligent Adaptive Distributed Systems
is an open research issue addressing nowadays tech-
nologies such as Communicating Objects (COT) and
the Internet of Things (IoT) that increasingly con-
tribute to our daily life (mobile phones, computers,
home automation, etc.). Complexity and sophisti-
cation of those systems make them hard to under-
stand and to master by human users, in particular end-
users and developers. Those are very often involved
in learning processes that capture all their attention
while being of little interest for them.
New usages, amounts of information, multiplicity
of users, heterogeneity, decentralization, dynamic ex-
ecution environments result in new system design re-
quirements: new technologies should adapt to users
more than users should do to technologies. If we
take home automation systems for example, both end-
users and system developers face problems:
• end-users encounter at least the following prob-
lems: instructions accompanying the devices are
too complex and it is hard for non-expert users to
master the whole behavior and capabilities pro-
vided by the system; such systems are usually de-
signed to meet general requirements through a set
of predefined configurations (a limited number of
scenarios in the best case). Information needed by
users is not necessarily the same from one to an-
other. A user may need a set of services in a given
context and a different set of services in another
context. A user does not need to use all what a
system could provide in terms of information or
services.
• developers of home automation systems lack soft-
ware support for building such systems, in par-
ticular self-adaptation mechanisms are not mature
yet: most existing approaches are either domain-
specific or too abstract to be helpful as stated in
(Abuseta and Swesi, 2015).
To illustrate our purposes, all along the paper we
use a simple example in home automation domain.
Let us consider a system composed of a roller shutter
(actuator) and a control key composed of two buttons
(sensors). In the very general case and in a manual
mode, with a one-button control key, a person uses
Alloui, I. and Vernier, F.
A Wise Object Framework for Distributed Intelligent Adaptive Systems.
DOI: 10.5220/0006426200950104
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 95-104
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
95

the button to: bring the shutter either to a higher or
to a lower position. With a second button, the user
can tune inclination of the shutter blades to get more
or less light from the outside. As the two buttons
cannot be activated at the same time, the user must
proceed in two times: first, obtain the desired height
(e.g. 70%) then the desired inclination (e.g. 45%).
For such systems, three roles are generally defined:
system developer, system configurator and end-user.
Assume an end-user is at his office and that accord-
ing to time and weather, his/her requirements for the
shutter change (height and inclination). This would
solicit the end-user all along the day and even more
when there are several shutters with different expo-
sure to the sun. From a developer’s point of view,
very few support is dedicated to easily construct adap-
tive systems: when provided, such support is limited
to an application domain and cannot be reused with a
minimum of constraints. Generally, adaptation mech-
anisms and intelligence are merged with the applica-
tion objects which make them difficult and costly to
reuse in another application or another domain.
To alleviate human interaction with such systems
and help developers to produce them, we propose
WOF, an object oriented framework founded on the
concept of Wise Object (WO) (Alloui et al., 2015).
A WO is a software-based entity that is able to learn
on itself and also on the others (e.g. its environ-
ment). Wisdom refers to the experience (on its own
behavior and on the usage done of it) such object ac-
quires by its own during its life. According to this ap-
proach, ”wise” buttons and shutters would gradually
construct their experience (e.g. by recording effect of
service invocation on their state, statistics on invoked
services, etc.) and adapt their behavior according to
the context (e.g. physical characteristics of a room,
an abstract state defined by a set of data related to
the weather, the number of persons in the office, etc.).
From the development perspective, we separate in the
WOF the ”wisdom” and intelligence logic (we name
abilities) of the objects from application services (we
name capabilities) they are intended to render.
To provide application (e.g. home automation sys-
tem) developers with relevant support, we designed
WOF with the minimum intrusion in the application
source code. The adaptiveness, intelligence and dis-
tribution related mechanisms defined in WOF are in-
herited by application objects. We realized a Java im-
plementation of WOF and validate it on a home au-
tomation example.
In the paper, we focus mainly on the architecture
of the WO and WOS, their global structure and be-
havior. In Section 2, we discuss the challenges and re-
quirements for nowadays self-adaptive systems. Then
we present design principles and fundamental con-
cepts underlying WOF in Section 3. In Section 4 we
detail the structure and behavior of a WO and a WO
System (WOS). To illustrate how to use the WOF, we
give an example in the Home automation domain in
Section 5. Finally, in Section 6 we discuss our ap-
proach and conclude with ongoing work and some
perspectives.
2 REQUIREMENTS
A system based on new technologies should be able
at runtime to: (1) know by itself on itself, i.e. to
learn how it behaves, to consequently reduce the un-
derstanding effort needed by end-users (even experi-
mented ones); (2) know by itself on its usage to adapt
to users according to the way and to the context it is
used in. In addition like any service-based system (3)
such system should be capable of improving the qual-
ity of services it is offering. WOF aims at producing
such systems while meeting those end-user related re-
quirements:
• Requirement 1: We need non-intrusive systems
that serve users while requiring just some (and
not all) of their attention and only when nec-
essary. This in a sense contributes to calm-
technology (Weiser and Brown, 1996) that de-
scribes a state of technological maturity where
a user’s primary task is not computing, but be-
ing human. As claimed in (Amber, 2010), new
technologies might become highly interruptive in
human’s daily life. Though calm-technology has
been proposed first by Weiser and Brown in early
90’s (Weiser and Brown, 1996), it is more than
ever, a challenging issue in technology design.
• Requirement 2: We need systems composed of
autonomous entities that are able to independently
adapt to a changing context. If we take two tem-
perature sensors installed respectively inside and
outside the home, each one lives its life and reacts
differently based on its experience (knowledge).
Typically a difference in temperature that is con-
sidered as normal outside (e.g. 5 degrees) may be
considered as significant inside. This means that
collecting and analyzing contextual information is
also a key requirement for those systems. An-
other situation is when unexpected behavior oc-
curs: continuous switching on switching off of a
button. In such a case, the system should be able
to identify unusual behavior according to its expe-
rience and to decide what to do consequently (e.g.
raising an alert to the end-user);
ICSOFT 2017 - 12th International Conference on Software Technologies
96

• Requirement 3: In an ideal world, a system end-
user declares his/her needs (a goal) and the system
looks for the most optimal way to reach it. This
relates to goal-oriented interaction and optimiza-
tion. The home automaton system user in our ex-
ample would input the request ”I want the shutter
at height h and inclination i” and the system based
on its experience would choose the ”best” way to
reach this state for example by planning a set of
actions that could be the shortest one or the safest
or the less energy consuming, etc. depending on
non-functional criteria taken into account in the
quality of service support (Bass et al., 1998).
Many approaches are proposed to design and
develop the kinds of systems we target: multi-
agent systems (Wooldridge, 2009), intelligent sys-
tems (Roventa and Spircu, 2008), adaptive systems
(Salehie and Tahvildari, 2009), self-X systems (Hueb-
scher and McCann, 2008). In all those approaches, a
system entity (or agent) is able to learn on its envi-
ronment (including other entities) through its interac-
tions. Our intention is to go a step forward by enhanc-
ing a system entity with the capability of learning by
its own on the way it has been designed to behave.
We see at least two benefits to this: (a) a decentralized
control: as each entity evolves independently from the
others, it can control actions to perform at its level ac-
cording to the current situation; (b) each entity can
improve its performance and then the performance of
the whole system.
On another hand, while valuable, existing design
approaches are generally either domain-specific or
too abstract to provide effective support to developers.
The IBM MAPE-K known cycle for autonomic com-
puting (IBM, 2005) is very helpful to understand re-
quired components for self-adaptive systems but still
not sufficient to implement them. Recently, more
attention has been given to design activities of self-
adaptive systems: authors in (Brun et al., 2013) pro-
posed a design space as a general guide for developers
to take decisions when designing self-adaptive sys-
tems. In (Abuseta and Swesi, 2015), authors propose
design patterns for self-adaptive systems where roles
and interactions of MAPE-K components are explic-
itly defined. Our primary aim is to offer developers an
object oriented concrete architecture support, ready
to use for constructing wise systems. We view this
as complementary to work results cited above where
more abstract architectures have been defined.
From a system development perspective, our de-
sign decisions are mainly guided by the follow-
ing characteristics: software support should be non-
intrusive, reusable and generic enough to be maintain-
able and used in different application domains with
different strategies. Developers should be able to use
the framework with the minimum of constraints and
intrusion in the source code of the application. We
consequently separated in the WOF the ”wisdom” and
intelligence logic (we name abilities) of the objects
from application services (we name capabilities) they
are intended to render.
3 FUNDAMENTAL CONCEPTS
OF WOF
We introduce the fundamental concepts of WO and
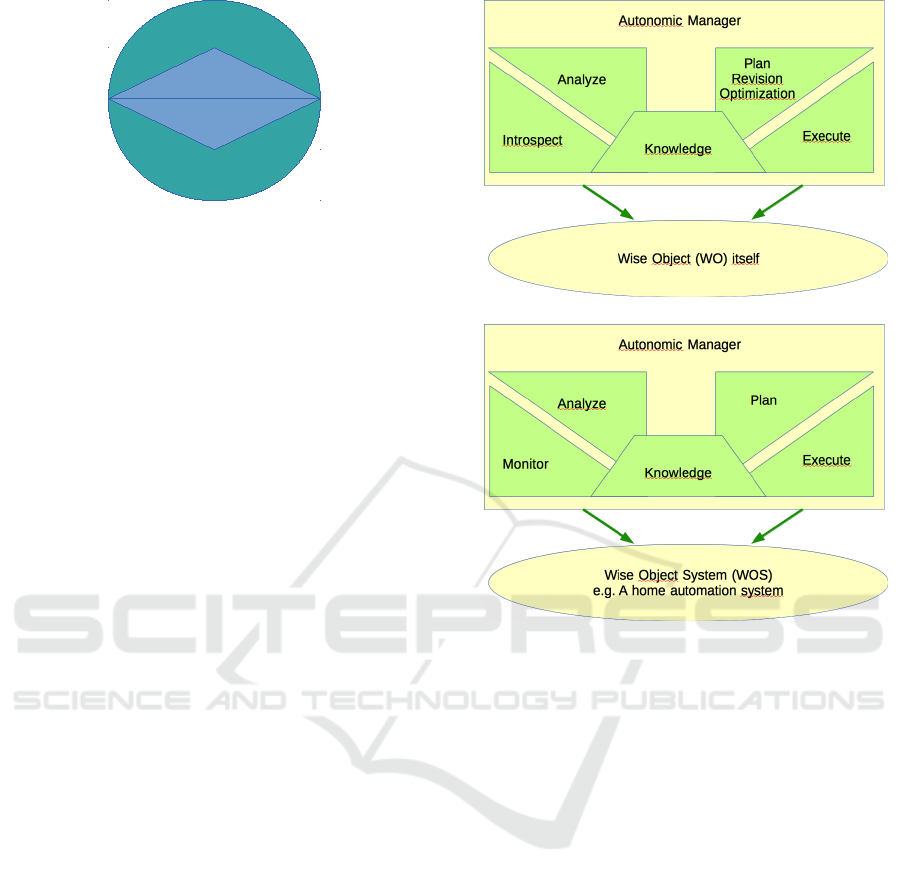
WOS from a runtime perspective. We adapt to this
end the IBM MAPE-K known cycle for autonomic
computing (IBM, 2005).
3.1 Concept of WO
We define a Wise Object (WO) as a software object
able to learn by itself on itself and on its environ-
ment (other WOs, external knowledge), to deliver ex-
pected services according to the current state and us-
ing its own experience. Wisdom refers to the experi-
ence such object acquires by its own during its life.
We intentionally use terms dedicated to humans as a
metaphor. When human better succeed in observing
the others, a Wise Object would have more facilities
to observe itself by introspection. A Wise Object is
intended to ”connect” to either a physical entity/de-
vice (e.g. a vacuum cleaner) or a logical entity (e.g.
software component) (see Figure 1). In the case of a
vacuum cleaner, the WO could learn how to clean a
room depending on its shape and dimensions. In the
course of time, it would in addition improve its per-
formance (less time, less energy consumption, etc.).
A WO is thus characterized by:
• its autonomy: it is able to behave with no human
intervention;
• its adaptiveness: it changes its behavior when its
environment changes;
• its intelligence: it observes itself and its environ-
ment, analyzes them and uses its knowledge to de-
cide how to behave (introspection and monitoring,
planning);
• its ability to communicate: with its environment
that includes other WOs and end-users in a de-
centralized way (i.e. different locations)
We designed WO in a way its behavior splits into
two states we named Dream and Awake. The former is
dedicated to introspection, learning, knowledge anal-
ysis and management when the WO is not busy with
A Wise Object Framework for Distributed Intelligent Adaptive Systems
97
Introspection
Monitoring
Communication
...
Knowledge
Capabilities
Figure 1: Conceptual structure of a WO.
service execution. The latter is the state the WO is in
when it is delivering a service to an end-user or an-
swering an action request from the environment. The
WO then monitors such execution and usage done
with application services it is responsible for. We use
the word Dream as a metaphor for a state where ser-
vices invoked by the WO do not have any impact on
the real system: this functions as if the WO is dis-
connected from the application device/component it
is related to.
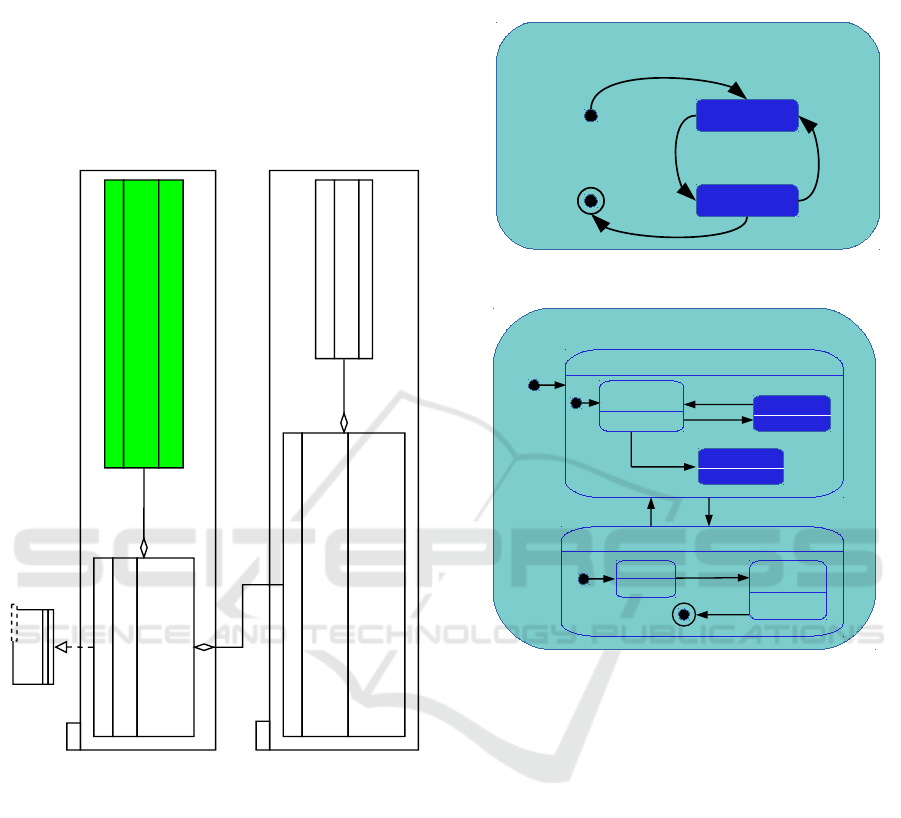
To ensure adaptiveness, each WO incorporates
mechanisms that allow it to perform a kind of MAPE-
K loops (IBM, 2005). Dream and Awake MAPE-
K are respectively depicted by Figure 2(a) and Fig-
ure 2(b). Let us call the dream MAPE-K a IAPE-K,
due to the fact that in the dream case the Monitoring
is actually Introspection.
When dreaming, a WO introspects itself to dis-
cover services it is responsible for, analyzes impact
of their execution on its own state and then plans re-
vision actions on its knowledge (experience). WO
constructs its experience gradually, along the dream
states. This means that WO knowledge is not neces-
sarily complete and is subject to revisions. Revision
actions may relate to adaptation, for instance record-
ing a new behavior, or to optimization like creating a
shortening of a list of actions to reach more quickly a
desired state. When awake, a WO observes and ana-
lyzes what and how services are invoked and in what
context. According to its experience and to analysis
results, the WO is able to communicate an emotion
if necessary. We define a WO emotion as a distance
between a current usage of its services and its com-
mon usage (usual one). With this metaphor, a WO
can be stressed if one of its services is more frequently
used or conversely, a WO can be bored. It can be sur-
prised if one of its services is used while it has never
been used before. WO emotions are intended to be
used as a new information by the system (other WOs)
and/or the end-users. This is crucial to adaptation at a
WOS level (e.g. managing a new behavior) and to at-
tract attention on potential problems (e.g. alerts when
temperature is unusually too high). With respect to
its emotional state, a WO plans relevant actions (e.g.
(a) WO Dream IAPE-K
(b) WO Awake MAPE-K
Figure 2: WO MAPE-Ks.
raising an alert, opening the windows and doors, cut-
ting off the electricity, etc.).
3.2 Concept of WOS (WO System)
We define a WOS as a distributed object system com-
posed of a set of communicating WOs. Communi-
cated data/information (e.g. emotions) are used by
the WOS to adapt to the current context. It is worth
noting that each WO is not aware of the existence of
other WOs. WOs may be on different locations and it
is the charge of the WOS to handle data/information
that coordinate WOs’ behaviors. The way this is done
is itself an open research question. In our case, we de-
fined the concept of Managers Section 4 to carry out
communication and coordination among WOs. This
is close to the Implicit Information Sharing Pattern
introduced in (Weyns et al., 2013).
4 DESIGN MODELS OF WO AND
WOS
WOF is an object oriented framework build on the top
ICSOFT 2017 - 12th International Conference on Software Technologies
98
of a set of interrelated packages. This section intro-
duces our design model of the concepts presented in
the previous section.
4.1 Design Model of WO
Figure 3 shows the UML Class diagram of WO. This
model is intentionally simplified and highlights the
main classes that compose a WO.
wo
WO
-graph: Graph
-lastRealityState: Vector<Object>
-dream()
-wakeUp()
+methodinvocate()
+methodInvocated()
-resetState(state:Vector<Object>)
Runn ingAction
-currentState: Integer
-methodName: String
-expectdNextState: Integer
+RunningAction(currentState:Integer,methodName:String,
expectdNextState:integer)
<<Interface>>
Runn able
1
graph
Graph
-edgeNames: Vector<String>
-adjacentNodes: Vector<Vector<Node>>
-incidenceEdges: Vector<Vector<String>>
-transitionUsed: Vector<Vector<Vector<UsageInformation>>>
+addNode(fieldValues:Vector<Object>)
+addEdge(source:Integer,destination:Integer,
actionName:String)
+getNextState(state:Integer,action:String): Integer
+isComplete(): Boolean
Node
-stateNumber: Integer
-fieldValues: Vector<Object>
+Node(fieldValues:Vector<Object>)
n
1
Figure 3: Class diagram of a WO.
WO Class is an abstract class that manages the
knowledge of its sub-classes. Knowledge of a WO
is both a capability-related knowledge model and a
usage-related knowledge model. In our present exper-
iment, we have chosen a graph-based representation
for knowledge on WO capabilities (i.e. application
services) and its usage. Knowledge on WO capabili-
ties is stored in a state-transition graph while that on
WO usage is stored in a Markov graph where usage-
related statistics are maintained. The Markov diagram
clearly depends on the usage of an Object (a WO in-
stance). It is important to note that even if initially,
the state diagram depends only on a class (WO sub-
classes), according to its usage an object (WO sub-
class instance) can add transitions into its state dia-
gram. Therefore, the state diagram is considered as
an instantce attribute rather than a class attribute.
Let us recall that WO behavior is split into two
states. The dream state and the awake state, see Fig-
ure 4.
WO state diagram:
Dream
Awake
[IDLE]
[Service
request]
(a) WO short state diagram
WO detailed state diagram:
Dream
Behavior
graph
KO
OK
Awake
[IDLE]
[Service request]
Collecting
usage data
Servicing
Learn on itself
Learn on usage
Behavior graph
validation
(b) WO detailed state diagram
Figure 4: WO state diagram.
The dream state is dedicated to acquiring the ca-
pability knowledge and to analyzing the usage knowl-
edge. The awake state is the state where the WO exe-
cutes its methods invoked by other objects or by itself,
and, monitors such execution and usage.
To build its state diagram – its capability knowl-
edge – the WO executes the methods of its sub-class
(i.e. an application class) to know the effect on the at-
tributes of this sub-class. Each set of attribute values
produces a state in the diagram and a method invoca-
tion produces a transition. The main constraint in this
step is that the method invocation must have no effect
on other objects of the application when the WO is
dreaming. This is solved thanks to the system archi-
tecture described in Section 4.2.
Regarding knowldge on an application object us-
age, two kind of situations are studied: emotions and
adaptation of behavior.
As introduced in 3, an emotion of WO is a dis-
tance between its current usage and its common us-
A Wise Object Framework for Distributed Intelligent Adaptive Systems
99
age (i.e. unusual usage). WO can be stressed if one
of its methods is more frequently used or conversely,
a WO can be bored. WO can be surprised if one of its
method is used and this was never happened before.
Emotions of WO are a projection of its current usage
with regard to its common usage. When a WO ex-
presses an emotion, this information is catched by the
WOS that may consequently lead to behavior adapta-
tion. At the object level, two instances of the same
class that are used differently – different frequencies,
different methods... – may have different emotions,
thus, different behavior and interaction in the WO sys-
tem.
A WO uses its state diagram to compute a path
from a current state to a known state (Moreaux et al.,
2012). According to the frequency of the paths used,
a WO can adapt its behavior. For instance, if a path
is often used between non-adjacent states, the WO
can build a shortcut transition between the initial and
destination states and then build the corresponding
method within its subclass instance (application ob-
jet). This consequently modifies the state diagram of
this instance.
4.2 Design Model of WOS
As explained in Section 3, WOs are not aware of the
existence of other WOs. They are distributed and
communicate data/information towards their environ-
ment. WOs may be on different locations and one
or many Managers carry out communication and co-
ordination among them. In this paper, we propose a
concrete architecture based on a bus system, where
any WO communicates with other objects through the
bus. This architecture has many advantages.
A first one is the scalability. It is easier to add
WOs, managers, loggers... on this kind of architec-
ture than to modify a hierarchical architecture. More-
over, this architecture is obviously distributed and en-
ables distribution/decentralizion of WOs in the envi-
ronment.
The third main advantage is the ability for a WO
to disconnect/reconnect from/to the bus when needed.
This makes it possible the implementation of the
Dream state Section 3. Let us recall that in the dream
state, a WO can invoke its own methods to build its
state diagram, but these invocations must not have any
effect on the subject system. Thus, when a WO en-
ters the Dream state, it disconnects itself from the bus
and can invoke its methods without impact on the real
world system. More precisely, the WO disconnects
its ”sending system” from the bus, but it continues re-
ceiving data/information via the bus. Therefore, if a
WO in Dream state receives a request for another ob-
bus
<<singleton>>
EventBusService
+registerSubscriber(subscriber:Object)
+postEvent(event:Object)
GraphEvent
-senderId: String
-graph: Graph
+EventGraph(senderId:String,graph:Graph)
StateChangeEvent
-senderId: String
-event: String
+Event(senderId:String,event:String)
ActionEvent
-receiverId: String
-action: String
+Action(receiverId:String,action:String)
wiseApplication
1
1
SubClasse1 SubClasse2 ...
wo
WO
+sendGraph(): void
+onActionEvent(a:ActionEvent): void
+onStateChange(): void
graph
grap h
n
Rule
Manager
+onStateChangeEvent(e:StateChangeEvent)
+onGraphEvent(e:GraphEvent)
n
Figure 5: Class diagram of a WO system based on a bus.
ject, it reconnects to the bus, goes out from the Dream
state to enter into Awake state and serves the request.
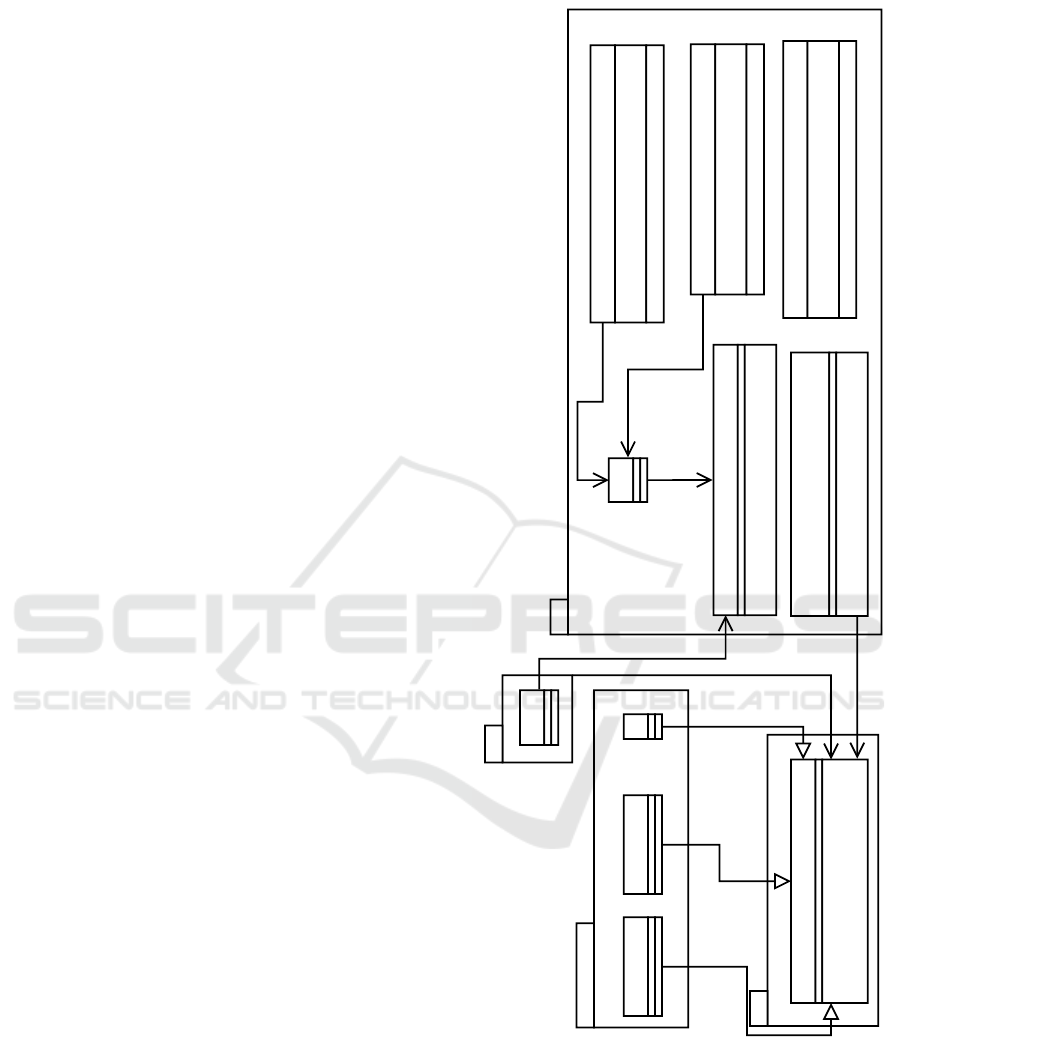
Figure 5 shows the Class diagram of a WO sys-
tem based on the bus. This model is simplified and
highlights the main classes that compose a WO bus
system.
The system uses an Event/Action mechanism for
ICSOFT 2017 - 12th International Conference on Software Technologies
100

WOs’ interactions. On an event, a state change occurs
in WO, an action may be triggered on another WO.
These peers “Event/Action” are defined by Event,
Condition, Action (ECA) rules that are managed by
a Manager. When this latter catches events (State-
ChangeEvent), it checks the rules and conditions and
posts a request for action (ActionEvent) on the bus.
From the WO point of view, if its state changes dur-
ing its Awake state, it posts a StateChangeEvent on
the bus. When a WO receives an ActionEvent, two
cases may occur: either the WO is in Awake state or
in Dream state. If the WO is in Awake state, it goes
to the end of its current action and starts the action
corresponding to the received request. If the WO is
in Dream state, it stops dreaming and enters into the
Awake state to start the action corresponding to the
received request.
In our Java implementation of WOF, object
classes produced by a developer inherit the behavior
of Wise Object (WO) class. An instantiated system
is defined as a wise system composed of Wise Ob-
jects that interact through a (or a set of distributed)
Manager(s) implemented by an event bus according
to publish-subscribe design pattern.
5 AN ILLUSTRATING EXAMPLE
”HOME AUTOMATION”
The concept of WO has many scopes of application. It
can be used to adapt an application to its environment,
to monitor an application from inside, to manage an
application according to its uses... In this section, we
highlight the WO behavior within a home automation
application. This choice is justified by the fact that:
• home automation systems are usually based on a
bus where many devices are plugged on;
• home automation devices have behavior that can
be represented by a simple state diagram.
According to the first point, a home automation sys-
tem can be directly mapped onto a WO system based
on a bus where the home automation devices are re-
lated to WOs. The second point avoids the combina-
torial explosion that can appear due to a large number
of states to manage in a state diagram.
Let us take a simple example a switch and a shut-
ter. The switch is modeled by 2 states “on” and “off”
and 3 transitions “on()” , “off()” and “switch()”.
Listing 1: Switch Java code.
p u b l i c c l a s s Sw i t c h e x t e n d s Wo {
p u b l i c b o o le a n p o s i t i o n ;
p u b l i c S w i t c h ( ) {
super ( ) ;
}
p u b l i c v o i d on ( ) {
i n v o k e ( ) ;
p o s i t i o n = t r u e ;
i n v o k e d ( ) ;
}
p u b l i c v o i d o f f ( ) {
i n v o k e ( ) ;
p o s i t i o n = f a l s e ;
i n v o k e d ( ) ;
}
p u b l i c v o i d s w i t c h ( ) {
i n v o k e ( ) ;
i f ( p o s i t i o n ){
p o s i t i o n = f a l s e ;
} e l s e {
p o s i t i o n = t r u e ;
}
i n v o k e d ( ) ;
}
}
The shutter is modeled by n states that represent its
elevation between 0% and 100%. If the elevation is
0%, the shutter is totally closed and if the elevation is
100%, the shutter is totally open. To avoid a contin-
uous system, the shutter can only go up or down step
by step.
Listing 2: Shutter Java code.
p u b l i c c l a s s R o l l i n g S h u t t e r
e x t e n d s Wo {
p r i v a t e i n t e l e v a t i o n = 0 ;
p r i v a t e s t a t i c i n t s t e p = 2 0 ;
p u b l i c R o l l i n g S h u t t e r ( ) {
super ( ) ;
}
p u b l i c v o i d down ( ) {
m e t h o d I n v o c a t e ( ) ;
i f ( t h i s . e l e v a t i o n >0){
t h i s . e l e v a t i o n −=
R o l l i n g S h u t t e r . s t e p ;
}
i f ( t h i s . e l e v a t i o n <= 0) {
t h i s . e l e v a t i o n = 0 ;
}
m e t h o d I n v o c a t e d ( ) ;
}
p u b l i c v o i d up ( ) {
m e t h o d I n v o c a t e ( ) ;
i f ( ! t h i s . e l e v a t i o n < 1 0 0 ) {
t h i s . e l e v a t i o n +=
R o l l i n g S h u t t e r . s t e p ;
i f ( t h i s . e l e v a t i o n >= 1 0 0 ) {
t h i s . e l e v a t i o n = 1 0 0 ;
}
A Wise Object Framework for Distributed Intelligent Adaptive Systems
101
}
m e t h o d I n v o c a t e d ( ) ;
}
As one design principle behind WOF is to mini-
mize intrusion within the application source code, we
have succeeded to limit them to the number of two
”warts”. The examples highlight those 2 intrusions in
the code. They are concretized by two methods im-
plemented in the WO Class – methodInvocate() and
methodInvocated() – and must be called at the begin-
ning and the end of any method of the WO subclass
(application class). Those methods monitor the exe-
cution of a method on a WO instance. We will discuss
about these ”warts” in the last section.
In our example, an instance of Switch and another
of RollingShutter are created. Two ECA rules are de-
fined to connect those WOs:
• [ SwitchInstance.on? / True / RollingShut-
terInstance.up() ]
• [ SwitchInstance.off? / True / RollingShut-
terInstance.down() ]
They define that when the event “on” occurs on the
switch, the action – method – “up” must be executed
on the rolling shutter and that when the event “off”
occurs on the switch, the action “down” must be ex-
ecuted on the rolling shutter. For the experiment and
feasibility study, the action on the SwitchInstance –
”on()” and ”off()” invocations – are simulated us-
ing the WO simulator we are developing. The ac-
tions ”on” and ”off” occur according to a Poisson dis-
tribution and depend on the elevation of the rolling
shutter. The likelihood of action ”off” occurrence
is RollingShutterInstance.elevation/100, the likeli-
hood of action ”on” occurrence is inversely propor-
tional. When an action occurs, ”on” or ”off”, it can
occur x times successively without delay, where x is
bounded by the number of occurrences to reach the
bound of shutter elevation, respectively 100% and
0%.
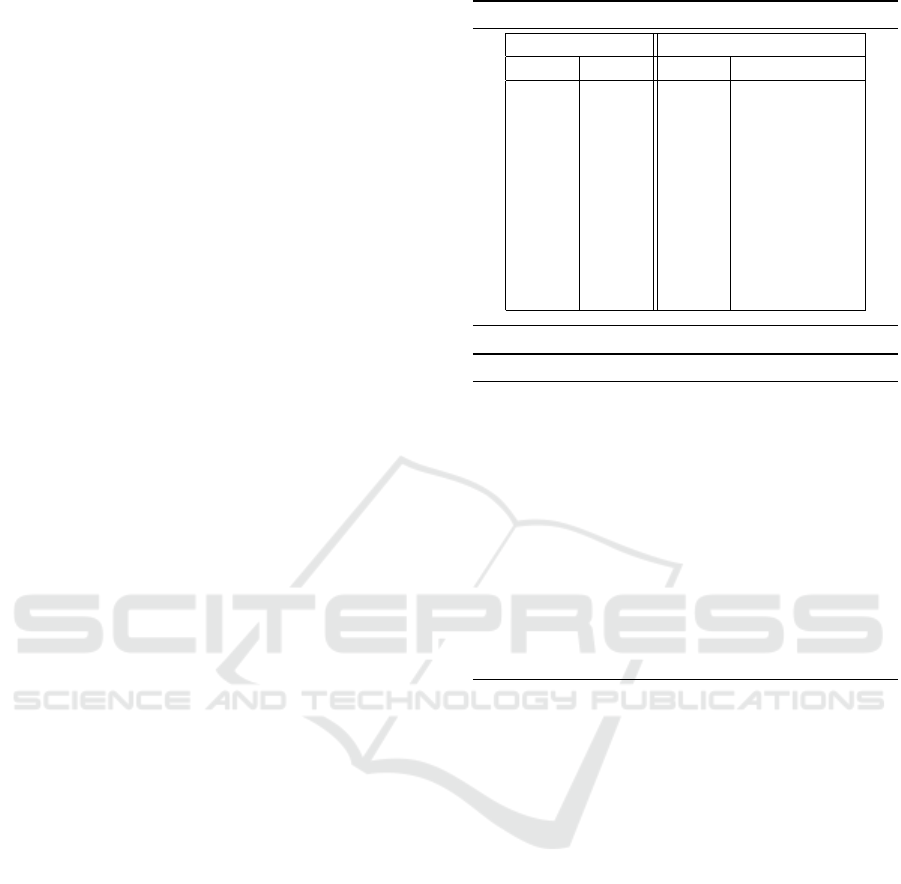
Presently, a WO acquires its knowledge about its
capabilities using a graph representation. The knowl-
edge about its usage is the logs of all its actions/events
and can be presented by a Markov graph. The log-
ging presented in Log 1 shows the events occurred
on each WO of the system. This information is col-
lected from each WO. With this information each WO
can determine its current behavior and a manager can
determine the system behavior. This is discussed in
Section 6. Log 2 gives Markov graph logging repre-
sentation. Let us note that the Markov graph repre-
sentation hides time-related information as it is based
on frequency of occurrences. Log 2 shows that the
wise part of the Switch instance detects the 2 states
Log 1 first event log stored on each WO.
SwitchInstance RollingShutterInstance
on off up down
0 1769 3 1774
1 6015 5 6016
1 6624 5 6625
4263 10435 4264 10436
8523 10435 8525 10444
9963 11026 9968 11028
9964 11026 9966 11028
10994 12615 10997 12616
10995 15811 10996 15816
... ... ... ...
Log 2 Switch log after 1000 iterations.
Graph:
2 States, 6 Transitions
0 1
0: 1 1
1: 1 1
State [0 , false] :
Adjacency on->[1 , true] - 0.313,
switch->[1 , true] - 0.0,
off->[0 , false] - 0.687,
State [1 , true] :
Adjacency off->[0 , false] - 0.311,
on->[1 , true] - 0.689,
switch->[0 , false] - 0.0,
Current State: 1
and the 6 transitions. It also shows a 2x2 adjacency
matrix followed by a description of the 6 transitions
including their usage-related statistics.
Log 2 shows for instance that from the state 0 with
the position attribute at false, the SwitchInstance may
execute method ”on()” or ”switch()” and go to state
1 or execute method ”off()” and remain in the same
state 0. Usage-related statistics show that method
”switch()” is never used from the state 0 all along the
1000 iterations.
Regarding the RollingShutter instance, the log-
ging after the 2nd iteration (Log 3) and the last Log 4
are given. Log 3 shows that the wise part of the
RollingShutter instance detects 6 states and 10 tran-
sitions (green values of adjacency matrix). Conse-
quently, it has not detected all the possible transitions
yet. This incomplete knowledge is not a problem,
during the next Dream state or if it uses those tran-
sitions during the Awake state, the WO part of the
application object will update its knowledge. The last
Log 4 shows that all states and transitions are detected
(learnt).
It is worth noticing that this example is intention-
ICSOFT 2017 - 12th International Conference on Software Technologies
102

Log 3 Rolling shutter log after the 2nd iteration.
Graph:
6 States, 10 Transitions
0 1 2 3 4 5
0: 1 1 0 0 0 0
1: 1 0 1 0 0 0
2: 0 1 0 1 0 0
3: 0 0 1 0 1 0
4: 0 0 0 1 0 1
5: 0 0 0 0 0 0
State [0 , 0 , 20] :
Adjacency down->[0 , 0 , 20] - 0.0,
up->[1 , 20 , 20] - 1.0,
State [1 , 20 , 20] :
Adjacency up->[2 , 40 , 20] - 1.0,
down->[0 , 0 , 20] - 0.0,
State [2 , 40 , 20] :
Adjacency down->[1 , 20 , 20] - 1.0,
up->[3 , 60 , 20] - 0.0,
State [3 , 60 , 20] :
Adjacency up->[4 , 80 , 20] - 0.0,
down->[2 , 40 , 20] - 0.0,
State [4 , 80 , 20] :
Adjacency down->[3 , 60 , 20] - 0.0,
up->[5 , 100 , 20] - 0.0,
State [5 , 100 , 20] :
Adjacency ,
Current State: 1
Log 4 Rolling shutter log after the last iteration.
Graph:
6 States, 12 Transitions
0 1 2 3 4 5
0: 1 1 0 0 0 0
1: 1 0 1 0 0 0
2: 0 1 0 1 0 0
3: 0 0 1 0 1 0
4: 0 0 0 1 0 1
5: 0 0 0 0 1 1
State [0 , 0 , 20] :
Adjacency down->[0 , 0 , 20] - 0.0,
up->[1 , 20 , 20] - 1.0,
State [1 , 20 , 20] :
Adjacency up->[2 , 40 , 20] - 0.653,
down->[0 , 0 , 20] - 0.347,
State [2 , 40 , 20] :
Adjacency down->[1 , 20 , 20] - 0.456,
up->[3 , 60 , 20] - 0.544,
State [3 , 60 , 20] :
Adjacency up->[4 , 80 , 20] - 0.443,
down->[2 , 40 , 20] - 0.557,
State [4 , 80 , 20] :
Adjacency up->[5 , 100 , 20] - 0.375,
down->[3 , 60 , 20] - 0.625,
State [5 , 100 , 20] :
Adjacency up->[5 , 100 , 20] - 0.0,
down->[4 , 80 , 20] - 1.0,
Current State: 1
ally simple as our goal is to highlight the kind of
knowledge a WO can currently acquire. State dia-
grams and usage logging are the knowledge base for
WOs. We discus about management and use of this
knowledge in Section 6.
6 DISCUSSION AND
CONCLUDING REMARKS
Our research addresses the problem of how to de-
sign self-adaptive intelligent systems that limit the in-
volvement of their users and developers to what is
necessary. We designed an object oriented frame-
work (WOF) with the concept of Wise Object (WO)
as the building block of such systems. As proof of
concept, we started developing a Java framework for
implementing these kinds of systems with the mini-
mum intrusion in the application code. Object classes
produced by a developer inherit the behavior of Wise
Object (WO) class. An instantiated system is then
a wise system composed of wise objects that interact
through an event bus according to the publish sub-
scribe design pattern. We believe that wise systems is
a promising approach to help humans integrate new
technologies both in their daily life as end-users and
in development processes as system developers. This
could also benefit to domains, like health, that heav-
ily rely on human expertise. Authors in (Holzinger,
2016) and (Holzinger et al., 2016) propose interac-
tive Machine Learning (iML) to solve computation-
ally hard problems. With regard to this, WOF puts
the ”human-in-the-loop” in two cases: when defining
ECA rules to connect distributed WOs and when val-
idating capability-related knwoledge constructed by
WOs. Human interaction remains however indirect.
In our first experiment, we limited intrusion to the
inheritance and two warts: the WO methods method-
Invocate() and methodInvocated() that must be called
at the beginning and the end of application methods.
Different ways can be used to go further and remove
those warts. A first way is to add dynamic java code
on-the-fly at runtime. A second one is to use dynamic
proxy classes. A third one is based on Aspect Ori-
ented Programming (Kiczales et al., 1997). Those so-
lutions solve the problem and we plan to implement
them in future versions of WOF. The objective is to
restrict the intrusion to the inheritance relationship be-
tween the WO Class and application classes.
In this paper, we focused on adaptation, moni-
toring and communication mechanisms and showed
how Wise Object behave according to their experi-
ence. There are still many research issues we are in-
vestigating: A first issue to handle is how to repre-
A Wise Object Framework for Distributed Intelligent Adaptive Systems
103

sent the knowledge in a Wise Object. State diagram
and Markov graphs are used in our first approach, but
other approaches are envisaged. Knowledge, specific
to each Wise Object, represents an amount of infor-
mation that can be big but not necessarily relevant.
A second issue relates then to knowledge aggregation
by Wise Object so that they can extract relevant in-
formation to the whole system. This issue may in-
volve techniques from information fusion approaches,
multi-criterion scales and fuzzy modeling. Knowl-
edge aggregation allows us to represent emotion of
a Wise Object, namely the distance from its current
behavior to its usual behavior (surprise, stress, etc.).
A last issue is related to the use of aggregated knowl-
edge within the system during its execution. This is
typically a problem of information fusion. The goal is
to generate a (sub-)system knowledge/emotion from
the knowledge/emotion translated by the Wise Ob-
jects.
REFERENCES
Abuseta, Y. and Swesi, K. (2015). Design patterns
for self adaptive systems engineering. CoRR,
abs/1508.01330.
Alloui, I., Esale, D., and Vernier, F. (2015). Wise Ob-
jects for Calm Technology. In 10th International Con-
ference on Software Engineering and Applications
(ICSOFT-EA 2015), ICSOFT-EA 2015, pages 468–
471, Colmar, France. SciTePress 2015.
Amber, C. (2010). Amber case 2011, we are all cyborgs
now ted talk.
Bass, L., Clements, P., and Kazman, R. (c1998.). Software
architecture in practice /. Addison-Wesley,, Read-
ing, Mass. :. Online version: Bass, Len. Software
architecture in practice. Reading, Mass. : Addison-
Wesley, c1998 (OCoLC)605442178 Online version:
Bass, Len. Software architecture in practice.
Brun, Y., Desmarais, R., Geihs, K., Litoiu, M., Lopes, A.,
Shaw, M., and Smit, M. (2013). A design space for
self-adaptive systems. In de Lemos, R., Giese, H.,
M
¨
uller, H. A., and Shaw, M., editors, Software En-
gineering for Self-Adaptive Systems II, volume 7475
of Lecture Notes in Computer Science, pages 33–50,
Dagstuhl Castle, Germany. Springer.
Holzinger, A. (2016). Interactive machine learning for
health informatics: when do we need the human-in-
the-loop? 3(2):119–131.
Holzinger, A., Plass, M., Holzinger, K., Crian, G. C., Pin-
tea, C.-M., and Palade, V. (2016). Towards interactive
machine learning (iML): Applying ant colony algo-
rithms to solve the traveling salesman problem with
the human-in-the-loop approach. In Availability, Re-
liability, and Security in Information Systems, pages
81–95. Springer, Cham.
Huebscher, M. C. and McCann, J. A. (2008). A survey of
autonomic computing—degrees, models, and
applications. ACM Comput. Surv., 40(3):7:1–7:28.
IBM (2005). An architectural blueprint for autonomic com-
puting. Technical report, IBM.
Kiczales, G., Lamping, J., Mendhekar, A., Maeda, C.,
Lopes, C. V., Loingtier, J., and Irwin, J. (1997).
Aspect-oriented programming. In ECOOP, pages
220–242.
Moreaux, P., Sartor, F., and Vernier, F. (2012). An effec-
tive approach for home services management. In 20th
Euromicro International Conference on Parallel, Dis-
tributed and Network-Based Processing (PDP), pages
47–51, Garching. IEEE.
Roventa, E. and Spircu, T. (2008). Management of Knowl-
edge Imperfection in Building Intelligent Systems.
Studies in Fuzziness and Soft Computing. Springer
Berlin Heidelberg.
Salehie, M. and Tahvildari, L. (2009). Self-adaptive soft-
ware: Landscape and research challenges. ACM
Trans. Auton. Adapt. Syst., 4(2):14:1–14:42.
Weiser, M. and Brown, J. S. (1996). Designing calm tech-
nology. In PowerGrid Journal, 1.01.
Weyns, D., Schmerl, B., Grassi, V., Malek, S., Mirandola,
R., Prehofer, C., Wuttke, J., Andersson, J., Giese, H.,
and Goeschka, K. (2013). On Patterns for Decentral-
ized Control in Self-Adaptive Systems. In de Lemos,
R., Giese, H., M
¨
uller, H., and Shaw, M., editors,
Software Engineering for Self-Adaptive Systems II,
volume 7475 of Lecture Notes in Computer Science
(LNCS), pages 76–107. Springer.
Wooldridge, M. (2009). An Introduction to MultiAgent Sys-
tems. Wiley Publishing, 2nd edition.
ICSOFT 2017 - 12th International Conference on Software Technologies
104
