
A Concept for Interoperable IoT Intercloud Architectures
Philipp Grubitzsch, Thomas Springer, Tenshi Hara, Iris Braun and Alexander Schill
Chair of Computer Networks, School of Engineering Sciences
Technische Universit
¨
at Dresden, Dresden, Germany
Keywords:
IoT Cloud, Interoperability, Intercloud, Broker.
Abstract:
Cloud platforms have evolved over the last years as means to provide value-added services for Internet of
Things (IoT) infrastructures, particularly smart home applications. From different use cases the necessity
arises to connect IoT cloud solutions of different vendors. While some established platforms support an
integration of other vendors’ systems into their own infrastructure, solutions to federate IoT cloud platforms
can hardly be found. In this paper, we analyze existing IoT cloud platforms with respect to their similarities and
derive a concept of an Intercloud Broker (IB) that enables the establishment of an IoT Intercloud to support
interoperability of cloud-based IoT platforms from different vendors. To demonstrate the feasibility of our
approach we evaluated the overhead introduced by the Intercloud Broker. As the results show, the IB can be
implemented with minimal overhead in terms of throughput and delay even on commodity hardware.
1 INTRODUCTION
In recent years, cloud computing (Platform as a Ser-
vice – PaaS) has been established as an important mo-
del to provide value-added services (data consumers)
with data from devices located in smart homes (data
producers) in a decoupled way. Those services are of-
ten the base of the “smartness” of things in this dom-
ain (Internet of Things – IoT). They collect and aggre-
gate sensed information, make decisions based on this
information and finally control one or more devices in
the home. For instance, a proximity trigger recogni-
zes a house owner coming home and a rule service
unlocks the front door and switches on lights and air
conditioning.
Interoperability between IoT clouds is motivated
by different use cases, for instance if devices of a
single user are managed by clouds of different de-
vice vendors, if multiple locations of a user are equip-
ped with smart home systems of different vendors, or
if different users cooperate, each with another smart
home cloud provider.
If a service is developed just for one of the depen-
ding cloud platforms, it must be nonetheless possible
to transparently access data from other clouds, where
device data of the affiliated users are located. Ef-
forts towards cloud interoperability are usually called
Intercloud or Cloud Federation (Toosi et al., 2014).
From the analysis of IoT cloud solutions it becomes
apparent that cloud interoperability across platforms
from different vendors is only rarely supported. Most
of the existing platforms only foresee an integration
of other vendors’ systems and data into their own
cloud. Support for an Intercloud setup that integra-
tes IoT cloud systems in a peer-to-peer (P2P) manner
can hardly be found.
As part of its cloud architecture NIST has defined
a component called Cloud Broker (Liu et al., 2011).
Its role is to provide data integration between cloud
consumers and multiple cloud providers. Referring to
the Intercloud, we propose a concept of an IoT Inter-
cloud Broker (IB) to enable interoperability between
IoT cloud infrastructures from different vendors. IoT
cloud infrastructures are mainly PaaS solutions pro-
viding abstractions for data consumption, device con-
trol, and management. With the focus on data con-
sumption and device control the proposed IoT IB is
responsible for adapting vendor-dependent APIs.
Contributions of this paper are threefold. First,
we analyze a representative set of IoT PaaS clouds
to show that existing PaaS cloud solutions share suf-
ficient similarities to allow a mapping between dif-
ferent solutions with respect to communication APIs
and device model (cf. section 2). Second, we intro-
duce a conceptual architecture for an IoT IB and spe-
cify the interfaces of the IoT IB that allow for an Inter-
cloud setup of IoT cloud infrastructures from different
vendors (cf. section 3). Third, we demonstrate with
a performance evaluation that the proposed IB can be
implemented on commodity hardware with minimal
676
Grubitzsch, P., Springer, T., Hara, T., Braun, I. and Schill, A.
A Concept for Interoperable IoT Intercloud Architectures.
DOI: 10.5220/0006375107040713
In Proceedings of the 7th International Conference on Cloud Computing and Services Science (CLOSER 2017), pages 676-685
ISBN: 978-989-758-243-1
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

overhead in terms of throughput and delay introduced
to Intercloud data exchange (cf. sections 4 and 5).
2 SERVICE APIS OF IoT CLOUDS
In the following section we present the results of an
analysis of smart home and IoT clouds with respect
to: communication for requesting device data and
controlling devices in real-time, device data model to
understand and express the semantics of device states,
mechanism to provide 3
rd
-parties access to the device
data and control options, and support for cloud fede-
ration. Our goal is to demonstrate that PaaS clouds
adopt comparable concepts and technologies that can
be mapped to each other. In addition, we derive infor-
mation to guide the design of the envisioned IoT IB.
The selection of considered cloud platforms is not
exhaustive, but we picked representative examples
from different categories. The selection was made
with respect to their importance to the market and
the target audience, and their intended field of use re-
spectively. Thus, this analysis includes popular pro-
prietary solutions like Google Nest
1
, Samsung Artik
2
Cloud, and AWS IoT
3
, which mainly targets end-user
products, but also open source solutions like Device-
Hive
4
for do-it-yourself IoT enthusiasts. The results
of our analysis are presented in Table 1. In the fol-
lowing, all criteria will be briefly introduced. We are
going to discuss the results at the end of this section.
For an in-depth comparison, we separated com-
munication into three high-level abstractions for our
analysis: Pull to retrieve full views of device states,
Push to keep track of state changes in real time, and
Control to change cloud-controlled device states.
2.1 Get Data with Pull Semantics
The current state of devices can be retrieved by clients
when they initiate a corresponding Pull request. It is
essentially useful for updating full views with large
data sets for a particular point in time or if upda-
tes are required in a low frequency. A periodic Pull
for updated data is also known as Polling. To over-
come high protocol overhead, pending long-lived re-
quests (Long-Polling) have emerged. The server can
respond with new data to the open request, or with a
1
https://developers.nest.com/documentation/cloud/
concepts
2
https://developer.artik.cloud/documentation/api-
reference/
3
http://docs.aws.amazon.com/iot/latest/developerguide/
what-is-aws-iot.html
4
http://devicehive.com/restful/
timeout response if the life-time of the request expi-
res. Because clients have to send new requests after
each response, both Polling mechanisms are no real
Push technologies (cf. next subsection). In case of
frequently updated data, even Long-Polling becomes
inefficient. Pull-based data requests differ in a set of
aspects that we consider relevant to achieve interope-
rability. They are discussed in the following.
Different protocols (Prot)
5
can be used to imple-
ment pull-based data request. For the analyzed plat-
forms the dominant solutions are RESTful APIs ba-
sed on HTTP and the Websocket protocol
6
(WS).
Both have become standards for the request-response
pattern in the web. While all platforms support
REST/HTTP, the Google Nest and Kiwigrid
7
plat-
forms additionally offer Websocket support.
Filters (Filt) are the most important parameter for
querying data, as they specify the information of in-
terest. Filter are specified based on a device model
(cf. subsection 2.4) and a query language. All clouds
provide slightly different query methods to filter de-
vice lists, including parameters for ids, types, owners,
single affiliated data point keys or values of devices
that match an arbitrary condition. The majority of the
investigated clouds apply key-value filters only to a
single target object (e.g., list with IDs, owner or types
of devices). This is equal to the Select-From-Where
SQL statements of relational DBs. For each target ob-
ject an own request is provided by the API (e.g., Get-
DevicesByOwner, GetDeviceByType). This results in
Path-like browsing for detailed device data.
Contrary to this filter concept, the Kiwigrid cloud
supports full key-value semantics (KVS) to filter for
arbitrary devices without any starting object. This
API provides an own query language which has to
be used for the filter definition. A related concept is
known from schema-less NoSQL databases and yield
a very powerful filter engine.
Projections (Pj) further reduce filtered results.
Related to a database table, a filter reduces the row
set, while a projection reduces the column set. It is
useful, if only a subset of information (e.g., GUID or
device type) is required.
Paging (Pg) is the method to retrieve just a subset
of the full result. It works with a limit (how many
devices to respond) and an offset (start device for the
next devices till limit) parameter. Nonetheless, some
clouds just support limit as the only parameter, and
thus no real paging.
5
The abbreviations introduced in brackets for all criteria
are the keys to Table 1 were these abbreviations are used to
name the columns.
6
https://tools.ietf.org/html/rfc6455
7
http://developers.kiwigrid.com/wiki/EM-SDK
A Concept for Interoperable IoT Intercloud Architectures
677
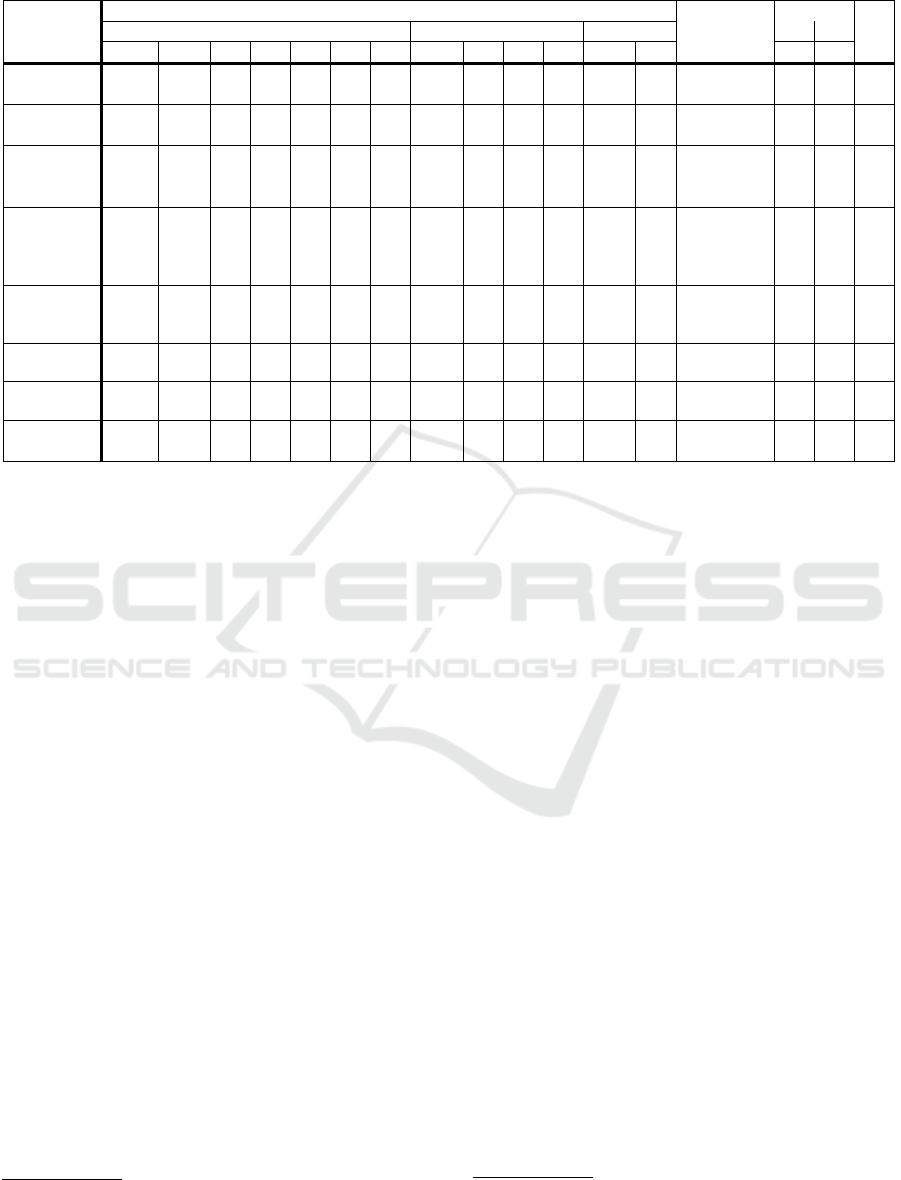
Table 1: Features of the investigated Cloud-APIs.
Cloud
Communication
Device Model
3rd Party
Fed.
Pull API Push API Control API
Prot
Filt
Pj
Pg
H S
Rl
Prot
Filt
PU
RA
Prot
Mth Mth
U2U
Google Nest
1
WS,
HTTP
Path
√
×
√ √
WS TB
×
HTTP
PDU
Single JSON
Doc, static D.
OA2
×
√
Samsung
Artik
2
HTTP
Path
√ √ √ √ √
WS,
HTTP
TB
×
HTTP RPC
JSON, NS +
D.-Types
OA2
√ √
AWS IoT
3
HTTP,
WS,
MQTT
Topic,
Path
× × × ×
√
HTTP,
WS,
MQTT
TB
× ×
HTTP,
WS,
MQTT
PDU
JSON, NS +
inheritable
Thing-Types
UC
√ √
MS Azure IoT
Suite
13
n/a
Topic,
Path
n/a n/a n/a n/a n/a
MQTT,
AMQP,
HTTP,
WS
TB n/a n/a
MQTT,
AMQP,
HTTP,
WS
PDU,
RPC
JSON schema
for Device
Twins
n/a n/a n/a
Kiwigrid
7
WS,
HTTP
KVS
√ √
√ √
WS CB
√
WS,
HTTP
PDU
YAML, NS +
inheritable
D.-Classes
OA2
√ √
Digi/Etherios
14
HTTP
Path
×
√ √ √
TCP,
HTTP
TB
√
prop.
RPC
XML/JSON
schema
UC
×
Device-Hive
4
HTTP
Path
×
√ √ √
WS TB
×
WS,
HTTP
RPC
JSON
D.-Classes
OA2
×
Eurotech
Everyware
8
MQTT,
HTTP
Path
√ √
√ √
MQTT
CB
×
√
MQTT,
other
RPC
XML/JSON
schema
UC
×
History (H) introduces two parameters startDate
and endDate, and is an additional filter for the re-
sulting device states (based on concrete values of data
points) over time. Without given history parame-
ters the result usually includes just the current device
state. The Kiwigrid and Eurotech
8
clouds support his-
toric data only by an API extension. Google Nest does
not provide access to historic data at all.
Sorting (S) the result set based on a specific row
requires parameters for the key (e.g., device type), a
method (e.g., alphabetic order), and a direction (as-
cending, descending).
Result List (Rl) is the main parameter of the query
response. Based on several successive Pull-based
queries it describes, if it is finally possible to retrieve
a full view of the devices states. This is important, as
a request for device data with our proposed IB API
needs to be possibly mapped to cloud-internal met-
hods, and the depending response should deliver the
same results.
2.2 Get Data with Push Semantics
Based on the interaction schema of Publish-Subscribe
clients can use push semantics to get informed about
frequent but small changes of device states in real-
time. After an initial Subscribe request, clients do
not need to send subsequent requests to get new No-
tifications about changed data. If a client doesn’t
8
http://everywarecloud.eurotech.com/doc/ECDev-
Guide/latest/default.asp
want to receive notifications any longer, it sends an
Unsubscribe request. The Notification phase between
both requests is equal to data streaming controlled by
the server. Push-based APIs usually work on top of
a message bus, rsp. queue or a stream where data
is not persisted before being processed. Databases of
Pull APIs may persist data from those streams.
Protocols based on REST can fully map Subscribe
and Unsubscribe requests. Nonetheless, during the
Notification phase the servers cannot operate state-
less anymore, as they have to keep clients subscrip-
tion information. Hence, HTTP-based communica-
tion with former client-server roles doesn’t work. For
Web-based Push transport between server and client,
the Websocket (WS) protocol has recently become the
state-of-the-art. Basically, a WS is a long-lived full-
duplex TCP-based connection initiated via an Up-
grade request on an existing HTTP connection. It
does not come with a Publish-Subscribe, but often
is the base for a higher level application layer proto-
col supporting this pattern (e.g., HTML5 server-sent-
events
9
). The main advantage of WS is, servers are
enabled to send messages without a previous client re-
quest. In the IoT and Messaging domain, protocols
10
like MQTT, CoAP, XMPP and others have been used
for Push-based communication. Some clouds also
support HTTP, but the client has to host its own web-
server and provide a Callback URL to the cloud. The
cloud then sends HTTP-POST requests to notify the
9
https://www.w3.org/TR/eventsource/
10
https://iotprotocols.wordpress.com/
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
678

client about new data.
Filters work similar to the Pull-based API. For
Push-based Publish-Subscribe systems, two types of
filters can be distinguished. Topic-based (TB) filte-
ring uses statically named (addresses) data channels
and allows filtering of key-values within a subset (de-
fined by the topic) of all possible key-values. Topic
names are usually defined by a userID, device GUID
or type. Some systems hierarchically group topics ba-
sed on wildcards for the topic name, which allows fil-
tering on parent topics. The most advanced approach
is Content-based (CB) filtering. It works on an arbi-
trary combination of all possible key-value pairs. It
can also include Boolean operators to compare value
conditions. Content-based Publish-Subscribe is still a
huge research field and is addressed mainly by DSMS
and CEP systems (Cugola and Margara, 2012).
Periodic Updates (PU) are synchronous notificati-
ons to a client. The main parameter is the rate, descri-
bing static time intervals between two new notificati-
ons. An optional parameter is an aggregation method
to aggregate on simple (e.g., last value) or complex
functions (e.g., average, median).
Reply Addressing is feature to distinguish diffe-
rent queries on client side. A client submits an ad-
dress parameter, where it expects to fetch the noti-
fications for a specific query. Most clouds just sup-
port server-controlled addressing. In both cases the
response from the server can optionally include the
exact address as parameter. For HTTP-based Push,
the client parameter is the Callback URL.
2.3 Control-ability of Devices
A basic requirement of IoT and Smart Home clouds
lies in controllability. This is in contrast to mere mo-
nitoring systems. A device control interface offers
methods to update a device in its virtual representa-
tion at the cloud. The cloud is then responsible to re-
solve this change into device specific commands and
to forward them to the physical device. Like Pull-
based data requests, it is generally realized by the
request-response pattern. A control request must in-
clude an identifier of the device to be updated and
information about what is intended to change at the
physical device.
Protocols – The control interfaces can be easily
implemented as RESTful API (often HTTP or WS),
as it comes with POST and PUT methods for crea-
ting and updating a certain resource. Therefore, the
URL acts as device ID, while another parameter is
the method of the control request described bellow.
Nonetheless, there are also no drawbacks when using
alternative approaches and protocols.
Methods (Mth) to control devices are very diffe-
rent. A classic approach are remote procedure calls
(RPC) or their object-oriented counterparts, remote
method invocations, respectively. A client has to add
the method to be called and the method specific pa-
rameters to its request. The most cloud APIs follow
this approach. The main drawback is, that the ser-
vice has to know about each device specific method.
For a unified usage an additional service description
needs be provided to the clients. A sophisticated met-
hod by some clouds is to use the data model itself
to control a device, namely partial device represen-
tation update (PDU). It is very similar to changing
an HTML DOM representation through a partial up-
date
11
. Advantageously, the service can fetch the de-
vice model representation when reading its state and
let the cloud platform do its job to translate changed
data to the appropriate device command (abstracting
device infrastructure is actually the main goal of PaaS
IoT clouds).
2.4 Device Data Model
Device types as well as related sensor data and con-
trol commands that are maintained by an IoT cloud
platform are represented by a device model. It usu-
ally includes information like ID, name, model, types
of sensed values and the values itself, actions, states,
read-write access, units, descriptions, and possibly
many more. Equal to the class-instance relationship in
object oriented programming, concrete device instan-
ces are often derived from templates, named device
type or device class. Similar to this concept, some de-
vice data models also support (multiple) inheritance.
That enables building of generic devices with basic
parameters (e.g., GUID, manufacturer, model), more
specific types like a “dishwasher”, or more concrete
“dishwasher model Ω by vendor X”. Every reviewed
cloud API provides its own device data model and
format. While they compare in basic structure, the
concrete device models largely vary. While the Goo-
gle Nest device model only supports three concrete
device types, relying on a simple JSON representa-
tion and does not support inheritance, the Kiwigrid
device model has an underlying schema, supports in-
heritance, and is multi-hierarchical.
2.5 3
rd
-party Access
Value-added services are not naturally allowed to re-
trieve data of users’ devices. They are generally a
11
https://cmatskas.com/update-an-mvc-partial-view-
with-ajax/
A Concept for Interoperable IoT Intercloud Architectures
679

third party (3
rd
-party) with respect to the user-to-
cloud relationship of storing users’ device data. Users
must be able to grant fine-grained access for their de-
vices. This can be device data (e.g., single key-values)
and/or control abilities.
Methods to grant or retrieve access based on user
credentials (UC) with login and password, or access
token-based concepts like Oauth 2.0
12
(OA2). Nowa-
days, OA2 is the state of the art for granting 3
rd
-party
access to own resources. It avoids exposing credenti-
als while combining authentication and access control
into a single operation.
User to User (u2u) access is another possible 3
rd
-
party scenario. Imagine a neighborhood where people
on vacation want to give other neighbors temporary
access to devices (e.g., door lock or CCTV). Hence,
we investigated if clouds allow sharing device resour-
ces across users. We distinguish no (e.g., forbidden),
full (across all users in the cloud), and partial sharing
(e.g., tenant or account based).
2.6 Cloud-federation Support
Some of the reviewed clouds’ API support cloud fe-
deration (Fed.). Because our intention is to build a
P2P-Intercloud, we were interested in the aspirations
of cloud providers to interconnect with other clouds.
It confirms our assumption of a general need for this
idea. The main difference to our approach is that 3
rd
-
party cloud providers have integrated their solution in
each of those ecosystems.
2.7 Discussion of the Results
The Microsoft Azure IoT Suite
13
is more like a PaaS
Framework than a ready solution. It provides building
blocks with different implementations to compose a
solution. There are neither reasonable constraints nor
a complete data model nor defined interfaces. Thus,
most of our evaluation criteria are not applicable (n/a).
We included it for sake of completeness.
The Pull API only shows minor differences
among all clouds. To the best of our knowledge, only
the Digi/Etherios
14
cloud is not capable to deliver a
full device state in the result list, while only utilizing
the Pull API. For the request parameters (Pj, Pg, H, S),
adaptation strategies have to be found for each cloud,
if they support a certain parameter only partially, or
not at all. E.g., the Nest cloud would need a solution
12
https://tools.ietf.org/html/rfc6749
13
https://docs.microsoft.com/en-gb/azure/iot-suite/iot-
suite-what-is-azure-iot
14
http://www.digi.com/resources/documentation/
digidocs/90002008/default.htm
for history parameters. As only the last state is sup-
ported, a possible strategy could be, to only deliver
this last state, if the requested time interval includes
the present time, otherwise nothing. Clouds missing
projection capabilities could respond the full device
projection, while their results need to be processed
either in the adapter of the IB or at service client side.
The same applies to parameters (PU, RA) of
the Push API. Here, the IB may add missing logic
for aggregation of periodic updates and also introduce
addresses instead of handler objects, which the most
clouds only support. This can be achieved by utili-
zing CEP and IoT messaging protocols. For the No-
tification phase of the Push-based communication, all
clouds provide communication on base of full-duplex
protocols. Notably, with MQTT the Eurotech Every-
ware cloud already has in use a protocol designed for
IoT Publish-Subscribe scenarios.
The most important differences of the clouds on
both, Pull and Push API, are related to the filters and
the device model. As they work together, a unified po-
werful solution needs to be selected for the IB, cove-
ring all vendor-dependent scopes. The proceed model
for filtering are equal for Path and TB, rsp. KVS and
CB. The firsts needs a structure to apply key-value fil-
ters (table/object, topic) on, while seconds work on
all contents (stream, NoSQL DB).
The Kiwigrid Cloud is able to filter key-values
with the same filter engine for Pull and Push. The Eu-
rotech Everyware cloud uses a CEP Engine for Push
data. Others’ filters are limited to a predefined set of
query operations rsp. filter on predefined topics. Be-
cause filtering with key-values is more flexible, our
API should support it. The adaptation for Pull-based
requests between NoSQL and relational databases is
possible. Following the Entity-Attribute-Value (EAV)
model, key-value queries can be mapped on schema-
based databases. Mainly, with a well-defined EAV
temporary DB, the required property mapping and re-
lationship mapping are feasible. The reversal is also
possible. Mapping between topic to content-based fil-
ters can be achieved by connecting to all topics, and
then filtering the result with a CEP engine.
Interoperability of device models is of special im-
portance since some of the communication aspects di-
rectly depend on a uniform/compatible interpretation
of device data. In particular, the complex filters pas-
sed to the Pull or Push API and the Control API base
on the device model. The heterogeneity of device mo-
dels makes it fairly impossible to simply link APIs of
different cloud providers. Complex mapping based
on ontologies and data adapters would be necessary
to establish a common base. In future, development
can be facilitated, if a common high-level standard for
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
680
an IoT device model would be established by all sta-
keholders. Nonetheless, solving this issue is out of
scope of this paper.
The previously discussed Control API method
PDU is suggested to be used for the IB. State changes
of a device can be mapped to certain RPC methods in
the low level device abstraction. Even the two clouds
supporting PDU natively, have yet done so.
For 3
rd
-party access, a unified permission object,
that can hold both, OA2 access tokens and UC could
resolve differences related to the method. Further
considerations are needed to address users among dif-
ferent clouds. This might be achieved by introducing
domains to user names (e.g., alice@cloudB), like in
other federated communication systems (e.g., e-mail,
XMPP). Therefore, no additional user management is
necessary on Intercloud layer.
As commercial cloud providers like Google and
Samsung already support cloud federation (however,
with selected partners only), the need for Intercloud
communication in the IoT domain becomes evident.
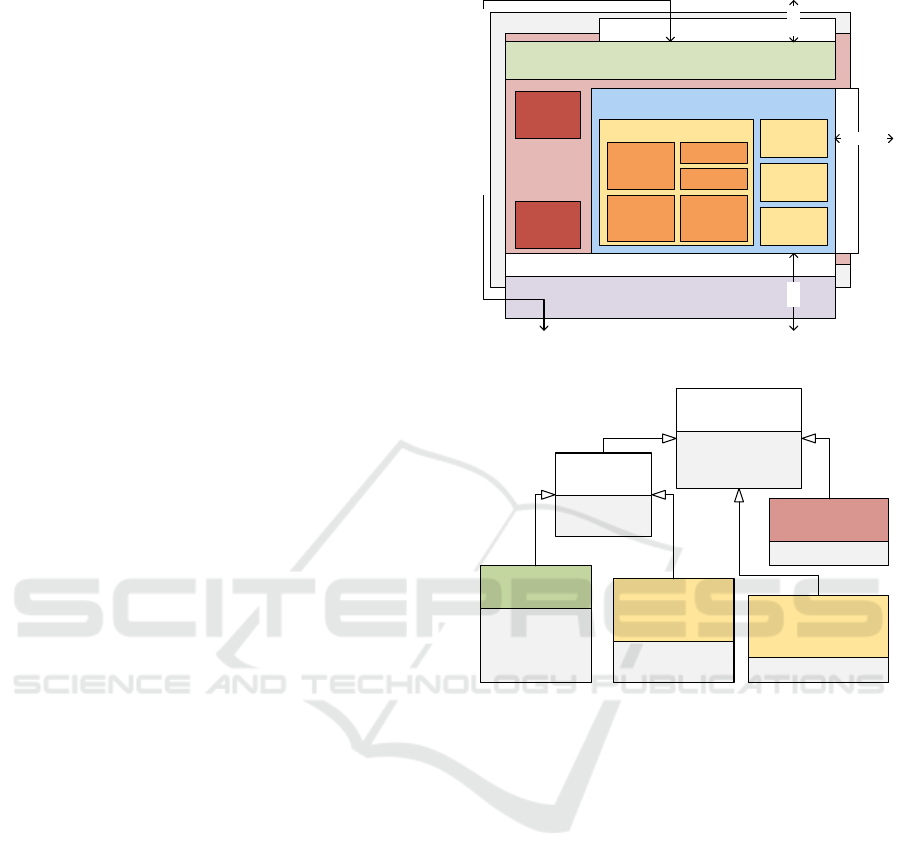
3 IoT INTERCLOUD
ARCHITECTURE
The architecture for the IB depicted in Figure 1 refines
our prior work (Grubitzsch, 2015), to achieve an In-
tercloud communication to exchange device data rsp.
control devices among cloud providers. Applied to
XaaS definitions, the brokers task can be concluded
as Device as a Service.
We envision an IB per IoT cloud. Our broker ar-
chitecture is designed with a set of common compo-
nents. These are mainly the Client Connector, the
Intercloud Gateway/Proxy and the before mentioned
Cloud Adapter working on top of an uniform Inter-
cloud Data Model. They are glued together by three
interfaces (IFace 1, 2, 3).
The Client Connector is responsible to delegate
internal or external service client requests through
IFace 1 to the internal components of the Intercloud
Proxy/Gateway. Figure 2 shows the supported messa-
ges of IFace 1 with related parameters/objects. It is
derived from our analysis in the previous section. We
introduce a general Permission object for OA2 access
tokens or UC to the base message. Sampling en-
capsulates periodic updates and the related aggrega-
tion functions. For both, Pull and Push based Filters,
we suggest to utilize a NoSQL-like query language
to support full key-value semantics. The PartialDe-
viceMap has device identifiers as keys and a partial
representation of each device to support the discus-
sed PDU. IFaces 2 and 3 are derived from IFace 1.
Intercloud Broker
Intercloud
Data
Model
Intercloud Proxy / Gateway
Client Connector
Auth &
Access
Discovery
Service
Distribution Controller
PubSub
Service
Cloud Adapter
Q-Merger
SLA
Controller
Device
Model
Query
Language
IFace 2
IFace 1
IFace
3
Intercloud
Clients
Cloud
Forwards to Intercloud of internal services
internal services device data
external services
Publish
Controller
Subscr.
Controller
CEP
Figure 1: Architecture of the proposed Intercloud Broker.
DataRequest
Filter
Projection
GetDeviceData
Paging
Sorting
ResultList
Message
from
to
SubscribeDevice
Data
Sampling
replyAddress
UnsubscribeDevice
DataMessage
replyAddress
Permissio n
History
ControlDevices
PartialDeviceMap
Pull
Push
Control
Figure 2: Messages with parameters processed by IFace1.
IFace 2 is an enabling interface to encourage develo-
pers to adapt cloud provider API behind this methods.
Hence, a Cloud Adapter needs to implement this in-
terface. It is marked by SERVE methods of IFace 1, as
serveGetDeviceData(...). Our analysis from section
2 shows that this should be feasible for most IoT
clouds. IFace 3 enriches messages with information
necessary for Intercloud communication (e.g., initial
requester, address of the messaging service receiving
real time device events) and expects the cloud address
in the to-field, where a message is supposed to be for-
warded to. It is marked by FORWARD methods as
forwardGetDeviceData(.. .).
The Intercloud Proxy/Gateway can directly for-
ward an external request to the related local cloud
via IFace 2, which has to be implemented by the
discussed cloud adapter. Cloud-internal service calls
would not be forwarded to the adapter of its own
cloud again. But the main task of the Broker is to
forward requests to other clouds. Therefore, the In-
tercloud Proxy/Gateway communicates with Brokers
of other clouds via IFace 3. For that, it utilizes se-
A Concept for Interoperable IoT Intercloud Architectures
681

veral components and services. Two of them shall be
briefly discussed, namely the Discovery Service and
the Distribution Controller.
The Discovery Service responses lists of clouds
for each request to be forwarded. This can be depen-
dent from queried devices in each request, to avoid
unnecessary forwards to other clouds, but requires the
discovery service to work with a partially replicated
directory. Such a directory possibly stores informa-
tion about devices, device types and access rights to
be synchronized between trusted cloud partners. We
plan to experiment with index-based search engines
like Apache Lucene.
The Distribution Controller handles Push-based
communication in the Intercloud. It utilizes a federa-
ted Publish-Subscribe service (pubsub) to deliver de-
vice event notifications to service clients via Publish-
Subscribe. The Subscription Controller subcompo-
nent administrates all client subscriptions forwarded
to the Intercloud. The Publish Controller subcompo-
nent administrates several publishers which republish
device notifications received from the local cloud (via
the cloud adapter) to the Intercloud.
Figure 3 shows the procedure from a client
subscription propagated to the Intercloud till the de-
livery of the notification through all related base com-
ponents. (1.) The client subscription is propaga-
ted to the Subscription Controller, which creates a
subscription id, virtually representing pubsub topics
(t1,t2,t3,.. .), and chooses a pubsub instance. The
client will subscribe to this topic on the given Pub-
Sub Service instance. (2.) The Subscription is enri-
ched by the pubsub address and the topic id. Then
the Subscription Controller calls the Proxy to forward
the subscription request. (3.) The Proxy uses infor-
mation from the Discovery Service (DS) to forward
the subscription to a local cloud adapter and/or prox-
ies in the Intercloud, which will also forward it to
their cloud adapters. The Adapter is calling a local
cloud operation to register a new device subscription
and (4.) link the proprietary notification handler pro-
vided by the cloud with the Publish Controller. For
load-balancing reasons it uses multiple publishers to
push data to a PubSub Service given in the forwarded
subscription. (5.) Publishers will now start to send
notifications to the Client via the PubSub Service (6.).
For our final architecture as shown in Figure 1, we
hope to overcome the described redundancy issue on
similar service requests (Grubitzsch, 2015) by intro-
ducing query merging. A Query-Merger (Q-Merger)
work on filter semantics of different client subscripti-
ons and is able to recognize covering filters as descri-
bed by (M
¨
uhl et al., 2006). Instead of directly forwar-
ding client subscriptions, the proxy will forward own
Proxy
3 .forwardSub
Subscription
Controller
Publish
Controller
Publisher
Publisher
Publisher
Publisher
Cloud
Client
PubSub
Service
1. Sub(...)
t3
2. forward
Adapter
6. Notify(...)
4.
link
3. forwardSub
Proxy
Push
Controller
Publisher
Publisher
Publisher
Publisher
5. push
5. push
local Intercloud
DS
t1
t2
Figure 3: Push-Subscription in the Intercloud.
subscriptions with merged queries derived from the
detected covering filters to the Intercloud. Thus, the
remote clouds have to handle less subscriptions and
will not redundantly transmit device notifications. We
propose to utilize a CEP engine to retrieve back noti-
fications for each client from the merged data stream,
which will be republished to the clients by the broker.
4 IMPLEMENTATION DETAILS
We have built a first prototype of the IB for the Ki-
wigrid cloud. It is written in Java on top of the
event driven framework Vert.x
15
. Vert.x utilizes the
(multi-)reactor pattern and allows clustering of actors.
Hence, it is well suited for development of distribu-
ted high performance cloud platforms. Each compo-
nent could be realized as an actor, but our implemen-
tation only distinguishes between actors for the Pu-
blish Controller, the “link”-part of the Adapter, and
all other components. The communication between
the broker’s internal components utilizes the distribu-
ted event-bus of Vert.x. For the external communica-
tion through IFace 1 and 3 (cf. Figure 2), we choose
XMPP with Openfire for the Broker, as it comes with
all desired communication patterns such as authen-
tication, entity addressing, and support for federated
communication among several message brokers.
Since experiments with different XMPP-Brokers
uncovered a limitation of the throughput for push no-
tifications of device events, we decided to rebuild
the pub-sub part on top of ZeroMQ’s XSub/XPub-
Proxy
16
pattern written in Java
17
. (Happ et al., 2017)
have shown that ZeroMQ is very suitable for huge IoT
scenarios. Each actor of a Publish Controller has its
own ZeroMQ Publisher. For now, the Intercloud data
15
http://vertx.io/
16
http://zguide.zeromq.org/page:all#The-Dynamic-
Discovery-Problem
17
https://github.com/zeromq/jeromq
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
682

model is the Kiwigrid device model and query lan-
guage (similar to MongoDB
18
), which results in a po-
werful filter engine. The main goal of this first pro-
totype is to keep details of the Discovery Service and
Distribution Controller as simple as possible, even if
this leads to communication redundancy. Hence, the
current Discovery Service is realized as a simple list
of trusted clouds. Each client request is simply for-
warded to all known clouds in the Intercloud. The
current Distribution Service comes without the pro-
posed Query-Merger and CEP-Engine.
5 EVALUATION
To evaluate the feasibility of the introduced IB con-
cept, we analyzed the overhead introduced by the IB.
We especially examined the performance scaling of
our broker in push scenarios, which cause significant
load to IoT Cloud systems. The evaluation is based
on the prototype implementation introduced earlier.
Figure 4 shows the testbed setup and the data flow.
The hard- and software specifications of the three
computer systems are provided in Table 2. All com-
puters are connected via Gigabit Ethernet.
Senders are a set of simulated IoT devices which
can be controlled by their total number as well as the
notifications per second each device sends as messa-
ges to the IoT Cloud. As device type we only use
a combined thermometer for inside and outdoor tem-
peratures. The notification messages are encoded in
JSON and have an average length of 465 Bytes. This
includes a timestamp when the notification was gene-
rated. The receivers are simulated services, which can
fully utilize the Broker’s IFace 1 (cf. Figure 2). In our
experiments they only use the PUSH part of the inter-
face with different filters (device ID, owner, etc.) to
only receive a subset of all devices in the Intercloud.
Both, senders and receivers ran on the same machine.
The Kiwigrid IoT cloud was deployed as single
node on the most powerful machine, due to high load
produced during our experiments.
The broker was also running on its own machine
to separate all performance related factors we are inte-
rested in from other processes. We measured the CPU
utilization, memory allocation and network through-
put every second for all broker involved processes
(main component, Openfire, ZeroMQ-Proxy). Imme-
diately after receiving a new message from the cloud,
the broker adds an additional timestamp to the mes-
sage. This way, we can later calculate the delay in-
troduced by the broker. At the Publish Controller we
18
https://www.mongodb.com
Broker
Cloud
Sender
Receiver
Gbit
Link
Server 1
Server 2Laptop
Figure 4: Data flow in the evaluation testbed.
Table 2: System specs used for evaluation.
Laptop Server 1 Server 2
Intel i7-4702HQ,
16 GB RAM,
Windows 10
Build 14393,
Oracle JDK
1.8.0 92
Intel i7-6700T,
16 GB RAM,
Ubuntu 16.04,
OpenJDK
1.8.0 121
Intel i7-4765T,
16 GB RAM,
Ubuntu 16.04,
OpenJDK
1.8.0 121
measured every second the message throughput (mes-
sages per second (MPS)) of the broker.
Even if this testbed is a single Cloud/Broker se-
tup, its performance results are the same as if we
would run a 2-Cloud/Broker setup, with devices sen-
ding their messages to cloud 1 and receivers listening
on broker of cloud 2. The only difference is, that
we would have to measure performance impacts of
Publish Controller and pubsub on two different ma-
chines (cf. Figure 3). Due to the inevitable rise in
complexity of our testbed setup to a minimum of five
involved computer systems without any gain in know-
ledge, we decided to use the described reduced setup.
We ran three experiments. In our first experiment
we analyzed how a single subscription scales for a va-
riable number of message per second (MPS). There-
fore, a single client has been subscribed to the broker
with an empty filter, which matches all notifications
from the cloud. During the experiment about every
second a new IoT device was spawned, with each ge-
nerating 50 MPS. The experiment was stopped after
spawning 1k devices and a total load of 50k MPS. As
Figure 5(a) shows, the CPU load appears to be linear
or better. The delay introduced by the broker is be-
low 1 ms in average. A maximum data rate of about
25 MB/s was transmitted to the receivers. The max-
imum memory allocation across all broker processes
was about 6.8 GB. Because all components are writ-
ten in Java, the memory allocation is dependent of the
given maximum heap size. It was set to the maximum
available RAM of the machine. Hence the JVM used
much more memory than actually required in order to
reduce garbage collection.
With our second experiment we tried to find out,
A Concept for Interoperable IoT Intercloud Architectures
683
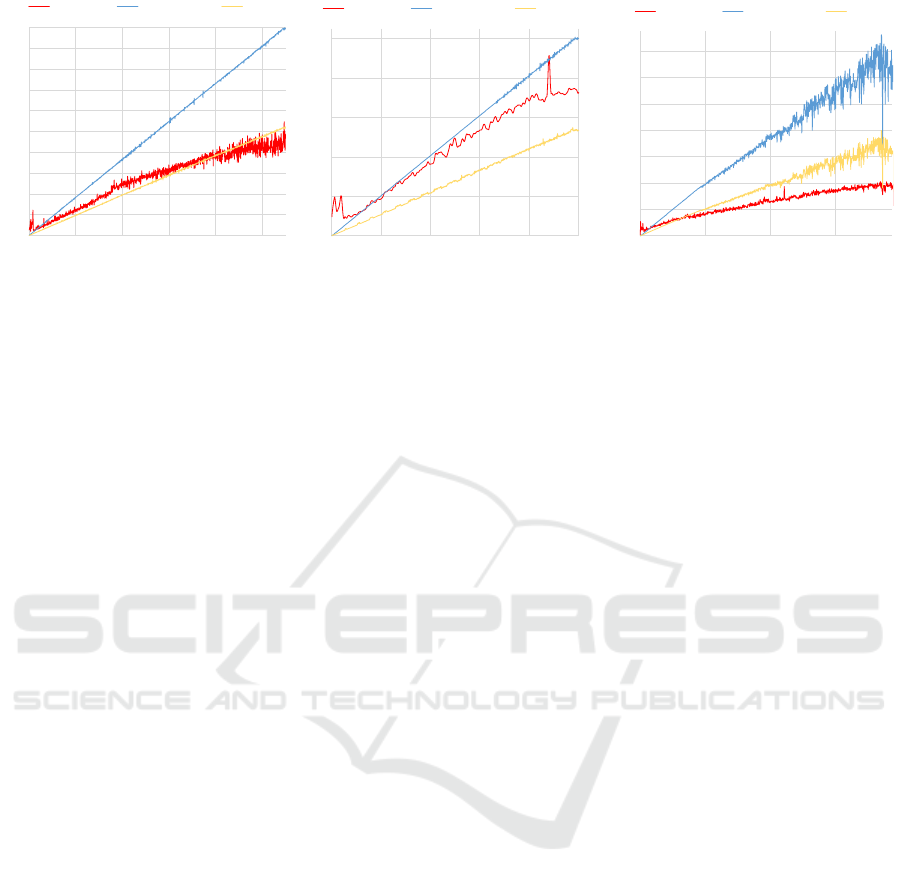
0
5
10
15
20
25
30
35
40
45
50
0 200 400 600 800 1000
elapsed time in s
CPU load in % MPS in thousands tx in MB/s
(a) Single Subscription Performance
0
2
4
6
8
10
0 200 400 600 800 1000
elapsed time in s
CPU load in % MPS in thousands tx in MB/s
(b) Multi Subscription Performance
0
20
40
60
80
100
120
140
0 200 400 600
elapsed time in s
CPU load in % MPS in thousands tx in MB/s
(c) Extreme Load Scaling
Figure 5: Evaluation Results.
how the number of subscriptions impacts perfor-
mance. Because the cloud is not able to process the
same load as in our first experiment, we reduced the
number of MPS per device. We spawned 1, 000 de-
vices before the experiment, each with an unique ow-
ner and generating 10 MPS. During the experiment,
we spawned new subscriptions every second. Every
subscription was exactly mapped to one device by
a filter matching a single owner. The total message
throughput achieved was 10k. Figure 5(b) shows very
similar load behavior to our first experiment. We
assume that the broker either scales at least linearly
with the number of subscriptions, or the scalability
of the broker is only dependent on the overall pro-
cessed MPS. Again, the introduced delay was below
an average of 1 ms, and allocated memory was ca.
6.4 GB.
Our last experiment targeted the highest message
throughput we could achieve with our available cloud.
We spawned 100 IoT devices, each generating a sin-
gle message per second before the start of the experi-
ment. During the experiment, we spawned 2 subscrip-
tions per second (filter matched all devices) until the
message delay through the whole system (Sender-
Cloud-Broker-Receiver) exceeded 100 ms. As Figure
5(c) shows, the maximum CPU load at the Broker was
still below 40%, while processing up to 140k MPS
with a network throughput of up to 70 MB/s which is
fairly
2
/3 of Gigabit Ethernet. There is also a jitter
starting for the message throughput, due to the high
CPU load in the cloud. The delay overhead introdu-
ced at the broker remained below 1 ms, while memory
allocation was at a maximum of 6.9 GB.
6 RELATED WORK
There has been initial research on the need and the
requirements of Intercloud computing (Toosi et al.,
2014). Thus, the most basic components of our Inter-
cloud approach pre-exist (Kliem, 2015; Aazam et al.,
2016). However, the main concepts differ in some
important details, or address non-IoT cloud domains
with deviating architectural requirements like virtua-
lization on IaaS layer.
(Kliem, 2015) presented a unified bottom-up con-
cept for a federated IoT device cloud. The concept
requires a centralized Root Domain Operator, which
is responsible for providing global device knowledge
and managing user accounts of other principal enti-
ties. Interoperability is achieved by developing stake-
holders using the same platform-dependent API. We
consider the bottom-up driven design unrealistic, as
cloud platforms on the market would need to be com-
pletely rebuild. In addition, resulting from the pro-
posed centralized “Root Domain Operator”, all cloud
providers would get dependent on this gatekeeper.
The media Intercloud by Aazam and Huh share
the same idea, to let application service clients to
either use the PaaS cloud internal API or the bro-
ker directly to find and use resources in the Inter-
cloud (Aazam et al., 2016).
In contrast to the discussed related work, our con-
cept does not introduce a root operator as super prin-
cipal to the architecture. Furthermore, our concep-
tual design addresses the existing cloud solutions (no
bottom-up design) and how cloud providers actually
cooperate (P2P, trust based).
(Botta et al., 2016) also conducted an analysis of
IoT clouds. They consider the mere existence of an
application API while we analyzed APIs in detail.
Also, the platforms included in their study differ from
the ones we analyzed.
(Laukkarinen et al., 2012) presented a survey
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
684

on infrastructure abstractions in wireless sensor net-
works, a sub-domain of the IoT. They also stated that
a versatile infrastructure abstraction (including query
language, data model/format) is required to ease deve-
lopment on top of heterogeneous infrastructure (i.e.,
devices). Their survey and our analysis of IoT cloud
APIs complement each other. The survey includes
basic API considerations for data access, too. The re-
sults are equivalent to our Pull (historical query), Push
(stream/event based Publish-Subscribe) and Control
model, but were not investigated in depth.
They focus on data interoperability; i.e., data for-
mat, ontology/homogenized model, meta data and ot-
hers, which we only addressed superficially. They
concluded the open research as a result of lacking ab-
stractions standardization. We share this assessment,
also demanding a unified Intercloud data model.
7 CONCLUSION AND
FUTURE WORK
We believe the Intercloud Broker is a viable approach
to achieve interoperability between IoT cloud plat-
forms. IoT cloud providers strive to not only compete
in price, but try to differentiate in further features
19
.
Thus, establishing standards for API and device data
model will fail. By analyzing a representative sub-
set of IoT cloud platforms we demonstrated that exis-
ting platforms share major commonalities that allow
interconnecting them by the proposed Intercloud ap-
proach. The communication APIs share sufficient si-
milarities allowing mapping between these APIs. No-
netheless, the mapping will not be trivial due to larger
differences with respect to device model and federa-
tion support. Since the device model is strongly rela-
ted to the communication APIs, further investigation
is required to allow a mapping.
The evaluation of our prototype implementation
shows that the IB can be implemented with minimal
overhead on average hardware. This mainly addresses
the expected high throughput while introducing insig-
nificant additional delay for push notifications which
is a main requirement for real-time notifications in
large IoT scenarios.
Our future work will focus on sophisticated con-
cepts and implementations for (1) the Discovery Ser-
vice to work with a device index, and (2) integra-
tion of Query-Merger and CEP into the Distribution
Controller. The goal for the next prototype is to opti-
19
http://www.computerworld.com/article/2508726/cloud-
computing/cloud-interoperability–problems-and-best-
practices.html
mize communication between clouds, while keeping
the necessary hardware footprint as low as possible.
Our main research goal is to find the optimal trade
off in broker design between communication redun-
dancy and performance overhead for avoiding this re-
dundancy. Thus, we plan to compare the results pre-
sented with the performance of the sophisticated ar-
chitecture. We also intent to run performance tests for
larger Intercloud scenarios with multiple clouds.
REFERENCES
Aazam, M., Huh, E. N., and St-Hilaire, M. (2016). To-
wards Media Inter-cloud Standardization Evaluating
Impact of Cloud Storage Heterogeneity. Journal of
Grid Comp., pages 1–19.
Botta, A., De Donato, W., Persico, V., and Pescap
´
e, A.
(2016). Integration of Cloud computing and Internet
of Things: A survey. Future Generation Computer
Systems, 56:684–700.
Cugola, G. and Margara, A. (2012). Processing flows of
information: From data stream to complex event pro-
cessing. ACM Computing Surveys (CSUR), 44(3):15.
Grubitzsch, P. (2015). Intercloud communication for value-
added smart home and smart grid services. In On
the Move to Meaningful Internet Systems: OTM 2015
Workshops, pages 10–19. Springer.
Happ, D., Karowski, N., Menzel, T., Handziski, V., and Wo-
lisz, A. (2017). Meeting iot platform requirements
with open pub/sub solutions. Annals of Telecommu-
nications, 72(1):41–52.
Kliem, A. (2015). Cooperative Device Cloud - Provisio-
ning Embedded Devices in Ubiquitous Environments.
Dissertation, Technische Universit
¨
at Berlin.
Laukkarinen, T., Suhonen, J., and H
¨
annik
¨
ainen, M. (2012).
A survey of wireless sensor network abstraction for
application development. International Journal of
Distributed Sensor Networks, 2012.
Liu, F., Tong, J., Mao, J., Bohn, R., Messina, J., Bad-
ger, L., and Leaf, D. (2011). Nist cloud compu-
ting reference architecture. NIST special publication,
500(2011):292.
M
¨
uhl, G., Fiege, L., and Pietzuch, P. (2006). Distributed
event-based systems. Springer Science & Business
Media.
Toosi, A. N., Calheiros, R. N., and Buyya, R. (2014). In-
terconnected Cloud Computing Environments. ACM
Computing Surveys, 47(1):1–47.
All URLs were last successfully accessed on
11/02/2016.
A Concept for Interoperable IoT Intercloud Architectures
685
