
Temporal Isolation Among LTE/5G Network Functions by Real-time
Scheduling
∗
Tommaso Cucinotta
1
, Mauro Marinoni
1
, Alessandra Melani
1
, Andrea Parri
1
and Carlo Vitucci
2
1
Scuola Superiore Sant’Anna, Pisa, Italy
2
Ericsson, Stockholm, Sweden
Keywords:
Real-time Scheduling, Virtual Radio Access Network, Temporal Isolation, Quality of Service Control.
Abstract:
Radio access networks for future LTE/5G scenarios need to be designed so as to satisfy increasingly stringent
requirements in terms of overall capacity, individual user performance, flexibility and power efficiency. This is
triggering a major shift in the Telcom industry from statically sized, physically provisioned network appliances
towards the use of virtualized network functions that can be elastically deployed within a flexible private cloud
of network operators. However, a major issue in delivering strong QoS levels is the one to keep in check the
temporal interferences among co-located services, as they compete in accessing shared physical resources.
In this paper, this problem is tackled by proposing a solution making use of a real-time scheduler with strong
temporal isolation guarantees at the OS/kernel level. This allows for the development of a mathematical
model linking major parameters of the system configuration and input traffic characterization with the achieved
performance and response-time probabilistic distribution. The model is verified through extensive experiments
made on Linux on a synthetic benchmark tuned according to data from a real LTE packet processing scenario.
1 INTRODUCTION
Radio access networks (RANs) are undergoing a
steep evolution towards higher overall capacity and
coverage across the territory and enhanced perfor-
mance for individual mobile devices, both in terms of
throughput and round-trip latency towards cloud com-
puting services (L
´
opez-P
´
erez et al., 2015; Clo, 2015;
Cis, 2016; Fiorani et al., 2015). This, coupled with an
increasing need for power-efficient and adaptive solu-
tions supporting highly variable traffic conditions, re-
sults in a strong demand for flexible network architec-
tures, designed applying principles from distributed,
cloud and service-oriented computing, thanks also to
the progressive convergence towards IP-based net-
works, as witnessed by LTE.
Traditional deployments suffer of a great under-
utilization of resources throughout the majority of
(off-peak) operations, leading to drawbacks in terms
of energy consumption, as well as unsustainable
OPEX. As opposed to this, the novel paradigm of Net-
work Function Virtualization (NFV) (NFV Industry
∗
This work was partially funded by Ericsson and has
been partially supported by the RETINA Eurostars Project
E10171. The authors want to thank Freescale for their sup-
port with the reference platform.
Specif. Group, 2012) is spreading, where IP-based
network functions are virtualized into software com-
ponents which are deployed, consolidated and scaled
across a flexible infrastructure, managed according to
a private cloud deployment model (Armbrust et al.,
2009; Hawilo et al., 2014).
Design of Telecom applications needs tradition-
ally to focus not only on functional correctness, but
also on non-functional properties such as availability
and performance. The latter ones have been facili-
tated by classical designs based on having separate
physical appliances dedicated to different network
functions. However, the efficiency of new NFV-based
designs relies on aggressive consolidation strategies
where various possibly heterogeneous functions (e.g.,
GSM, LTE, IMS, security-related, billing, monitor-
ing) can be hosted on the same system, leading to
increased temporal interferences among them due to
competing accesses to shared physical resources.
Therefore, one of the key success factors in new
designs is the degree at which the various co-located
functions can actually be temporally isolated from
each other. The traditional way to control the recip-
rocal interference among co-deployed software com-
ponents is by partitioning the available physical re-
sources. For example, a network function can be de-
368
Cucinotta T., Marinoni M., Melani A., Parri A. and Vitucci C.
Temporal Isolation Among LTE/5G Network Functions by Real-time Scheduling.
DOI: 10.5220/0006246703680375
In Proceedings of the 7th International Conference on Cloud Computing and Services Science (CLOSER 2017), pages 368-375
ISBN: 978-989-758-243-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
ployed as a virtual machine or container
2
restricted
to operate onto a subset of the cores actually available
on the physical server, with a reduced overall amount
of RAM, local persistent storage, and even restricted
networking capabilities (throttling). However, while
memory partitioning and network throttling can be
done with quite a degree of flexibility, partitioning of
physical cores constitutes a major restriction on the
possible available choices, and the number of func-
tions that can be deployed onto the same system. In
many cases, to enhance resources utilization, physi-
cal cores are shared among multiple virtualized func-
tions, but there are no ways to control exactly how
much time the shared processors are dedicated to each
such function, resulting in services suffering of very
variable and unpredictable performance fluctuations.
Contributions. In this paper, the problem of tem-
poral isolation among a number of network functions
co-located on the same physical node is tackled. A
design is proposed for a multi-core server capable
of hosting multiple functions with predictable perfor-
mance levels, leveraging two main building blocks:
a) use of a reservation-based real-time scheduler at
the OS kernel level, providing scheduling guarantees
to, and temporal isolation across, individual func-
tions; b) an insightful queueing-based mathematical
model that links performance statistics that can be ex-
pected from the system with its configuration options
in terms of scheduling parameters and input traffic
characterization. The CPU scheduler in use allows for
guaranteeing each deployed function both the com-
putational bandwidth and the precise time granular-
ity over which CPU cycles are granted. The model
is verified through experimental validation made on a
synthetic workload and scenario inspired to real data
coming from an LTE use-case.
2 PROBLEM PRESENTATION
2.1 NFV and Virtualized RAN
In the context of radio access networks (RANs), the
NFV paradigm is translating into a number of solu-
tions based on the concept of virtualizing RAN func-
tions (Clo, 2015; Haberland et al., 2013; Costa-Perez
2
In what follows, we refer to the term virtualized func-
tion and virtual machine in a loose sense, including the pos-
sibility that these functions are deployed as virtual machines
on a hypervisor, or simply deployed within different con-
tainers or isolated processes within the same operating sys-
tem or runtime environment.
L2 low
L2
L1
REC
L1
L2
L1
L2 high
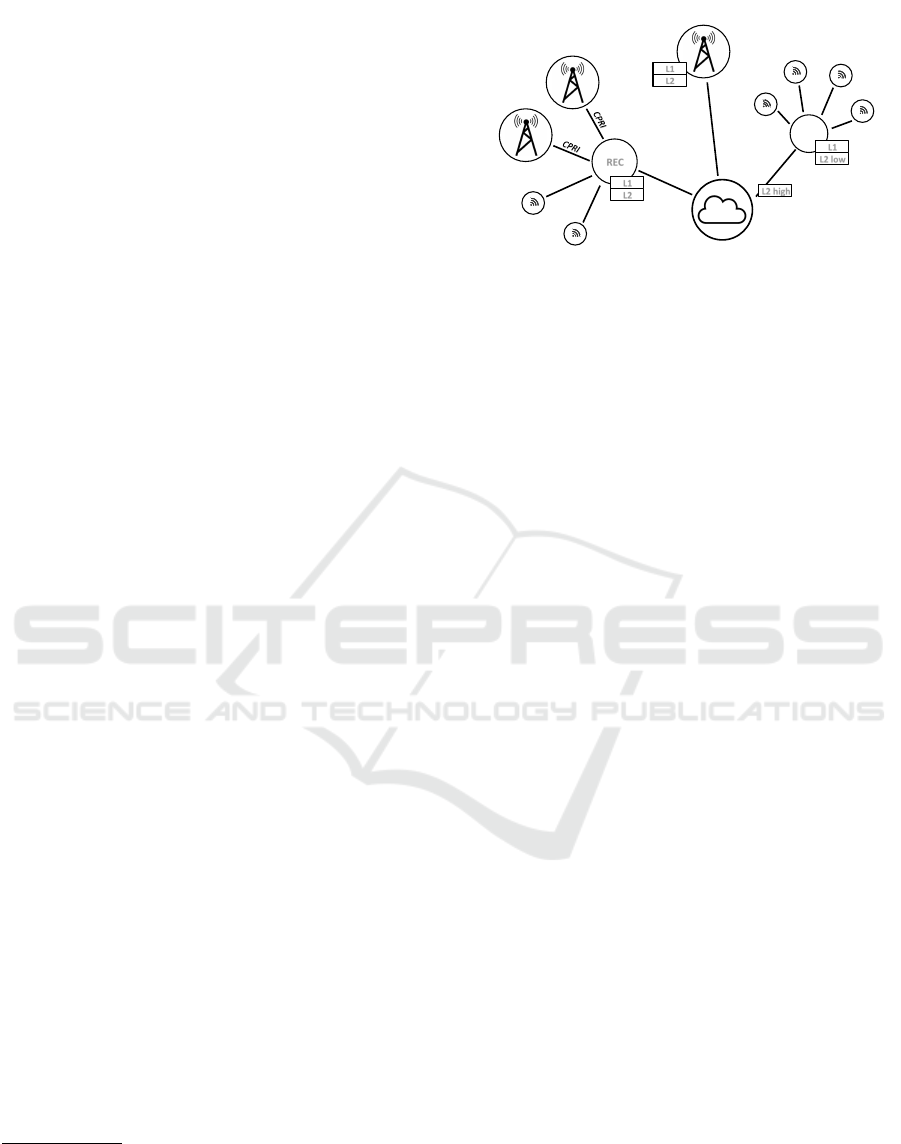
Figure 1: Possible RAN/VRAN deployment models.
et al., 2013; Maaref et al., 2014; Cis, 2016). In these
architectures, packet processing functions are moved
away from the antenna equipment and consolidated
into geo-distributed private-cloud data centers. For
example, in the context of LTE (see Figure 1), there
have been proposals to move both the physical (L1)
and the MAC (L2) layers to a shared data center, let-
ting antennas become merely remote radio heads con-
nected to a centralized Remote Equipment Controller
(REC) in the private cloud via high-performance con-
nectivity such as CPRI (CPR, 2015). However, such
an approach poses very high bandwidth requirements
and stringent-to-prohibitive round-trip latency con-
straints (in the order of 100µs) on the CPRI link. A
certainly more viable approach is the one to central-
ize in the NFV infrastructure only the MAC layer
processing, where the requirement on round-trip la-
tency becomes way more satisfiable, e.g., air inter-
face L2 packets need to be processed in less than
6ms (Cis, 2016), where 3.66ms is a typically accept-
able L2 round-trip latency (Pichon, 2014).
Also, L2 processing functions are usually CPU-
intensive, e.g., as they usually involve encryp-
tion/decryption of data. Therefore, traditional ap-
proaches to fulfilling the tight latency/processing con-
straints resort to dedicated hardware accelerators in
such cases. However, novel cloud-based paradigms
usually rely on commodity hardware so it makes
sense to focus on software-only solutions.
2.2 Problem Statement
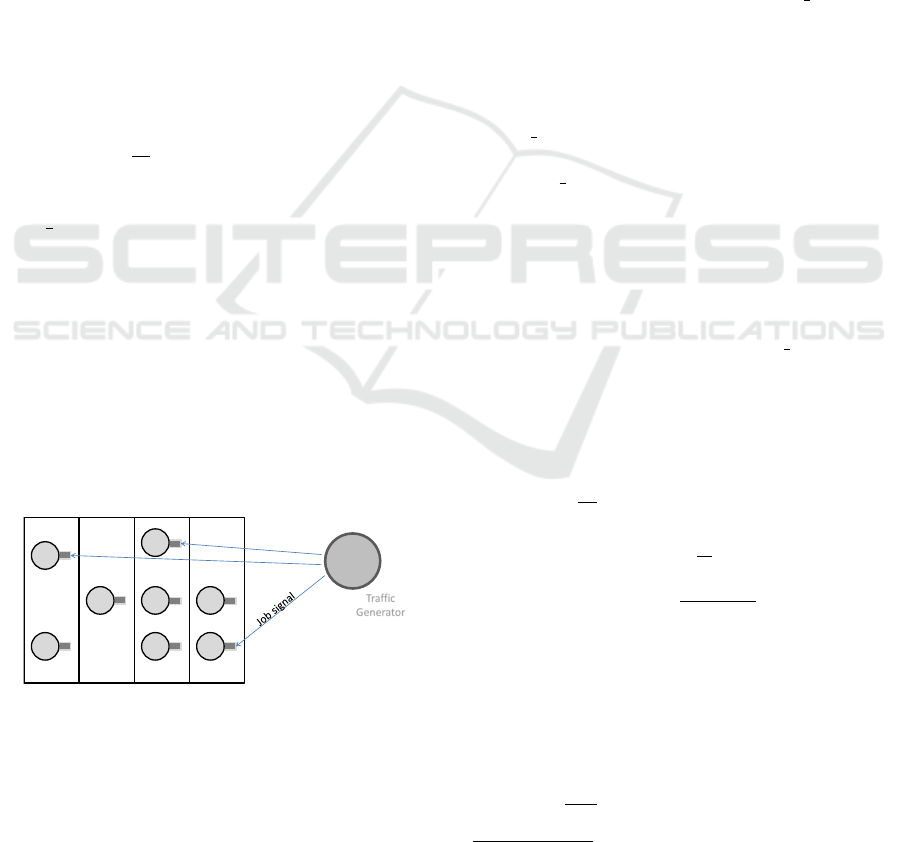
Consider the scenario in Figure 2: several network
functions are deployed onto a single Digital Unit, per-
forming L2 packet processing functions for LTE cel-
lular networks. We focus on controlling the temporal
interference as due to co-scheduling of CPU-intensive
network functions on the same cores and modeling
their resulting performance. Therefore, interferences
due to competing access to other resources than the
CPU, like network or disk or cache/memory hierar-
Temporal Isolation Among LTE/5G Network Functions by Real-time Scheduling
369
chy, is post-poned to future extensions of the work.
Traffic coming from each cell is handled by one
or multiple threads that need to process each received
packet within a response-time R
∗
, at least for a (high)
percentage of the traffic φ. In other words, denot-
ing with R the stochastic variable representing the
response-time of each of our L2 traffic processing
functions, the probabilistic Service-Level Objective
(SLO) under consideration is formally stated as:
Pr
{
R ≤ R
∗
}
≥ φ. (1)
The considered reference system is composed of
a single server with m identical cores, where multi-
ple worker threads are deployed, serving traffic from
a number of cells. The considered scenario and anal-
ysis shown in Section 4 deals explicitly with the case
of n workers serving traffic from the same cell, with
a random load-balancing of the traffic among them.
Input traffic from each cell is assumed to be a Pois-
son process, with independent identically and expo-
nentially distributed (i.i.d.) inter-arrival times, with
average aggregate arrival rate λ
G
and average inter-
arrival times of
1
λ
G
. Processing times for workers are
assumed exponentially distributed and i.i.d. as well,
with average service rate µ and average computation
time
1
µ
, when processed in isolation on a single core.
Note that it is assumed that the platform does not have
CPU frequency switching capabilities, or that they are
disabled if present, otherwise the input traffic volume
would influence the packet processing times. Indeed,
in the majority of modern architectures, static power
consumption is dominant w.r.t. dynamic one. Micro-
processors based on such technologies save consider-
able more energy when in deep-sleep states, so it is
convenient to run them at the maximum frequency so
that the amount of time they spend in the sleep state
is maximized (Benini et al., 2000).
Traffic
Generator
Figure 2: Reference scenario: a cell traffic is processed by
one or more workers deployed on a multi-core server.
In this paper, a model is shown that, given a char-
acterization of the input process, allows for tuning the
scheduling configuration for the workers so as to meet
the SLO requirements of Equation (1). As it will be
clear shortly, the presented closed-form model pro-
vides also additional insights to system designers.
3 RESERVATION-BASED CPU
SCHEDULING
Resource reservation scheduling (Mercer et al., 1993)
is a well-known model for sharing a physical
CPU/core among a number of tasks, in a way that
each one of them can be granted a pre-fixed amount
of time Q on the CPU (called budget) every allocation
window of duration P (called scheduling period), pro-
viding temporal isolation among co-located tasks. A
specific algorithm implementing this paradigm is the
Constant Bandwidth Server (CBS) (Abeni and But-
tazzo, 1998), a technique that gained attention from
the Linux community recently as due to its availabil-
ity within the mainline kernel since version 3.14 (Lelli
et al., 2016), in the form of the SCHED DEADLINE
scheduling policy.
3
Under specific conditions (see
Section 3), this allocation of the CPU is granted
by the scheduler, independently of how other tasks
behave in the system, effectively providing tempo-
ral isolation among them. On a multi-core systems,
SCHED DEADLINE can provide both global and parti-
tioned EDF (G-EDF and P-EDF, respectively).
SCHED DEADLINE adds to the real-time schedul-
ing features of the Linux kernel in serving soft real-
time workloads, making it an increasingly appeal-
ing platform for the execution of virtualized network
functions with predictable performance levels (Vi-
tucci et al., 2014; Clo, 2015).
Schedulability Guarantees. SCHED DEADLINE is
known to provide temporal isolation among worker
tasks with no deadline misses if either of the follow-
ing conditions is satisfied: 1) if tasks are globally
scheduled, reservations respect the G-EDF schedula-
bility bound (Goossens et al., 2003) for m cores,
n
∑
i=1
Q
i
P
i
≤ m(1 −U
max
) +U
max
, (2)
where U
max
, max
i=1,..., n
n
Q
i
P
i
o
; if Q
i
/P
i
= U ∀i:
U ≤
m
n − 1 + m
; (3)
if n <= m G-EDF will migrate each task to a differ-
ent core with the only constraint that Q
i
/P
i
≤ 1 for
each i; 2) if tasks are partitioned among cores, reser-
vations need to respect the P-EDF (single-processor)
schedulability bound (Liu and Layland, 1973): as-
suming each core j hosts n
j
workers with
∑
m
j=1
n
j
= n:
n
j
∑
i=1
Q
j, i
P
j, i
≤ 1, for each j = 1, . . . , m. (4)
3
https://www.kernel.org/doc/Documentation/
scheduler/sched-deadline.txt
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
370

The traditional way to enforce timing constraints
and full isolation assigns
{
Q
i
}
equal to the task worst-
case computing time and
{
P
i
}
equal to the minimum
inter-arrival times for subsequent requests. However,
such an approach is aimed at hard real-time systems,
where even a single deadline miss cannot be tolerated.
In this paper, a soft real-time approach is under-
taken instead, where the system has to satisfy precise
timing requirements expressed as a probabilistic SLO.
Therefore, it is possible to trade exact schedulability
for efficiency, operating the system at a point that is
beyond the above teheoretical schedulability bound,
especially for the G-EDF case, because the test in
Equation (2) is quite pessimistic (see Section 5).
4 APPROACH AND ANALYSIS
In this section, a probabilistic response-time analy-
sis based on queueing theory is presented, for the
LTE/5G application scenario described in Section 2.
4.1 SCHED DEADLINE Queueing Model
In the proposed architecture, network func-
tions are deployed by scheduling them using
SCHED DEADLINE, with scheduling parameters
{
(Q
i
, P
i
)
}
n
i=1
to be decided as detailed below. Thanks
to the temporal isolation property enforced by
SCHED DEADLINE (see Section 3), each worker
task i with a SCHED DEADLINE runtime of Q
i
and
period of P
i
≥ Q
i
can be seen as an isolated queueing
system whose service rate µ
i
has a slow-down factor
of
Q
i
P
i
w.r.t. the maximum sequential service rate µ:
µ
i
=
Q
i
P
i
µ (5)
If Poissonian traffic from a cell is randomly spread
across more workers so that a percentage p
i
of the
aggregate traffic λ
G
is picked up by worker i, then
sub-flows in input to the workers are still Poissonian
with an average rate of λ
i
= p
i
· λ
G
. Since both ar-
rival and service rates are assumed to be exponen-
tially distributed, the behavior of each worker can be
approximated as an isolated M/M/1 queue (Kendall,
1953). Refer to Section 5 for an experimental vali-
dation of the approximation and the derived results.
General M /M/1 results (Gross et al., 2008) are spe-
cialized to our case in what follows, where for sim-
plicity the discussion is referred to a single cell whose
entire aggregate traffic λ
G
is split across the n workers
to be deployed onto an m-cores platform.
Let ρ be defined as ρ ,
λ
i
µ
i
≡
λ
G
P
nQµ
and assumed
constant across all workers (to ease notation, the i in-
dex is omitted, when the discussion is implicitly refer-
ring to a specific worker or all workers have the same
configuration). First, let us consider the schedulabil-
ity condition for the scheduler as detailed in Section 3.
Under P-EDF, assuming a system filled up with re-
served tasks, the maximum theoretical computational
bandwidth is derived from Equation (4):
Q
P
=
m
n
=⇒ ρ =
1
m
λ
G
µ
. (6)
Under G-EDF, instead, Equation (2) leads to:
Q
P
=
m
n − 1 + m
=⇒ ρ =
λ
G
µ
n − 1 + m
nm
. (7)
In addition to the theoretical schedulability condi-
tions, it is useful to make explicit the general stability
condition for the system, e.g., that incoming traffic on
each queueing system on average does not exceed the
server processing capability:
ρ < 1 =⇒
Q
P
>
λ
G
nµ
. (8)
Once the servers are properly isolated, each of
them behaves as an independent M/M/1 queue, thus
the average response time R
i
and waiting time W
i
are
obtained as:
E [R
i
] = E [W
i
] +
1
µ
i
=
1
µ
i
− λ
i
. (9)
The response-time R
i
distribution is known to be ex-
ponential as well with parameter µ
i
− λ
i
, thus we get:
• R
i
probability distribution function (PDF):
f
R
i
(t) = (µ
i
− λ
i
)e
−(µ
i
−λ
i
)t
for each t > 0, (10)
• R
i
cumulative distribution function (CDF):
F
R
i
(t) = 1 − e
−(µ
i
−λ
i
)t
for each t > 0. (11)
4.2 Choice of the (Q
i
,P
i
) Parameters
The formal SLO requirement for the system, as given
in Equation (1), can now be described as: “φ
th
per-
centile of the response-time R ≤ a given threshold
R
∗
”. This requirement can be formalized as follows:
F
R
(R
∗
) ≥ φ, (12)
where F
R
is the response-time CDF introduced in Sec-
tion 4. In the case of an M/M/1 system with param-
eters µ
i
and λ
i
, Equation (12) becomes:
Q
i
P
i
≥
1
µ
λ
i
−
ln (1 − φ)
R
∗
. (13)
Note that any (Q
i
, P
i
) pair satisfying the proba-
bilistic SLO in Equation (13), satisfies also the M/M/1
Temporal Isolation Among LTE/5G Network Functions by Real-time Scheduling
371
stability condition in Equation (8). On the other hand,
schedulability of the reservations on the server has to
be ensured separately, e.g., according to Equations (7)
or (6) if G-EDF or P-EDF is used, respectively.
From Equation (13), the full specification of Q
and P is obtained observing that it is convenient to set
P = R
∗
, to avoid temporal interferences and not cause
excessive scheduling on the platform. The point is
further detailed in Section 5.2.
4.3 Maximum Sustainable Arrival Rate
The M/M/1 model described in Section 4 allows us
to compute the maximum sustainable aggregate ar-
rival rate for a given platform configuration: from
Equation (12), we have
λ
G
= nλ
i
≤ n
Q
P
µ +
ln(1 − φ)
R
∗
, (14)
where the logarithm brings a negative contribution.
We remark that the obtained upper-bound to λ
G
permits achieving the target response-time percentile,
but it does not guarantee the full temporal isolation
of the reservation servers. Temporal isolation can
be guaranteed by considering the maximum com-
putational bandwidth
Q
P
saturating the system under
P-EDF in Equation (6), that is:
λ
G
≤ mµ +
n
R
∗
ln(1 − φ) . (15)
On the other hand, using the maximum computational
bandwidth as from theoretical G-EDF schedulability
in Equation (7), we obtain:
λ
G
≤
nm
n − 1 + m
µ +
n
R
∗
ln(1 − φ) . (16)
5 EXPERIMENTAL VALIDATION
In this section, experimental results are presented that
validate the analysis in Section 4. All experiments
have been conducted on a Freescale LS2085A RDB
(ARMv8) board, with 8 cores running at 1.8GHz
and 16GB of RAM, a promising platform for energy-
efficient data-plane processing and NFV. The system
boots an image with Linux 4.1.8, built using Yocto
4
.
A synthetic application was built around the LTE sce-
nario described in Section 2: a client acting as traf-
fic generator is capable of submitting requests accord-
ing to tunable exponential inter-arrival times; a multi-
threaded server is able to serve requests received from
the client, taking a tunable exponentially distributed
4
https://www.yoctoproject.org/
computation time; these are designed to dump on disk
the full set of observed response-times throughout
each experiment. The server can configure its threads
using tunable SCHED DEADLINE settings, including
the use of either G-EDF or P-EDF.
5.1 Scenario Parameters
In the considered scenario, n = 8 worker threads have
been instantiated, scheduled under G-EDF across m =
4 out of the available cores, and configured to serve
traffic with a packet processing rate of µ
∼
=
5300pkt/s.
A single client generator submitted requests at an av-
erage rate of λ
G
= 15000pkt/s, obtaining an indi-
vidual (worker) traffic average rate of: λ
i
=
λ
G
n
=
1875pkt/s. The cell traffic type and rate, as well as
the workers service rate, have been chosen by best-
fitting parameters over data gathered from a real LTE
installation. Also, the same industrial use-case man-
dated the needed probabilistic SLO parameters: 99%
of the packets served within 2ms, namely: R
∗
= 2ms
and φ = 0.99. The presented results have been ob-
tained via 1-minute long runs, each relying on 15000∗
60 = 900K measured response times.
5.2 Experimental Results
Theoretical results from Section 4, specifically Equa-
tions (13) and (8), can easily be applied for the just
explicited configuration, obtaining, among others:
• min Q/P for stability
Q
P
>
λ
G
nµ
∼
=
35.38%;
• min Q/P for SLO:
Q
P
≥
1
µ
h
λ
i
−
ln(1−φ)
R
∗
i
∼
=
78.8%.
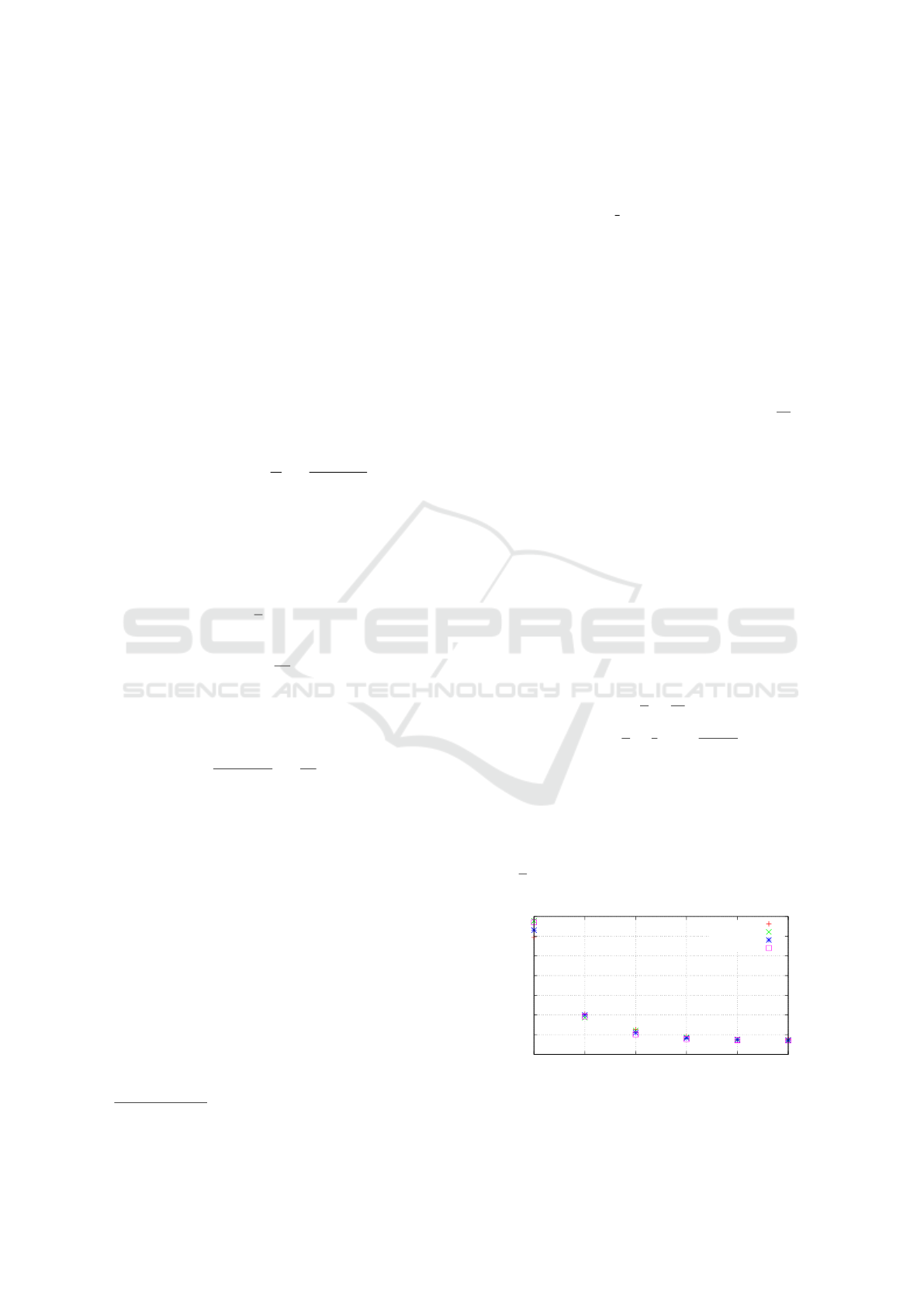
These results have been compared with the obtained
experimental data, shown in Figure 3, where the ob-
tained response-time 99
th
percentile (on the Y axis)
is plotted with various Q/P ratios (on the X axis),
and various scheduling periods (different data sets).
The probabilistic SLO requirement is clearly satisfied
when
Q
P
≥ 0.7, as per the theoretical expectation.
0
2000
4000
6000
8000
10000
12000
14000
0.4 0.5 0.6 0.7 0.8 0.9
Time (us)
Q/P
Experimental response-time p99
P: 250 us
P: 500 us
P: 1000 us
P: 2000 us
Figure 3: Experimental thresholds (R
∗
) when φ = 0.99, for
different values of the ratio Q
i
/P
i
.
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
372
Selection of the Period P
i
. Equation (13) provides
a choice for the Q/P ratio, for a worker that needs to
service traffic with precise probabilistic guarantees.
The exact parameters can be determined based on
the following considerations, focusing on the choice
of the period P. First, a smaller period leads to in-
creased scheduling overheads and context switches
(roughly 2 per scheduling period per task); indeed,
the obtained experimental 90
th
and 99
th
percentiles of
the response times were slightly better (lower) with
higher periods, among the ones tried (see Figure 3).
Second, the scheduling period determines the time
granularity based on which SCHED DEADLINE sched-
ules each reserved task, thus the scheduling delay is
roughly bounded by P; indeed, experimental results
show slightly worse worst-case response-times when
using higher periods. As also found experimentally,
setting P = 2ms allows for meeting the temporal re-
quirements without excessive overheads.
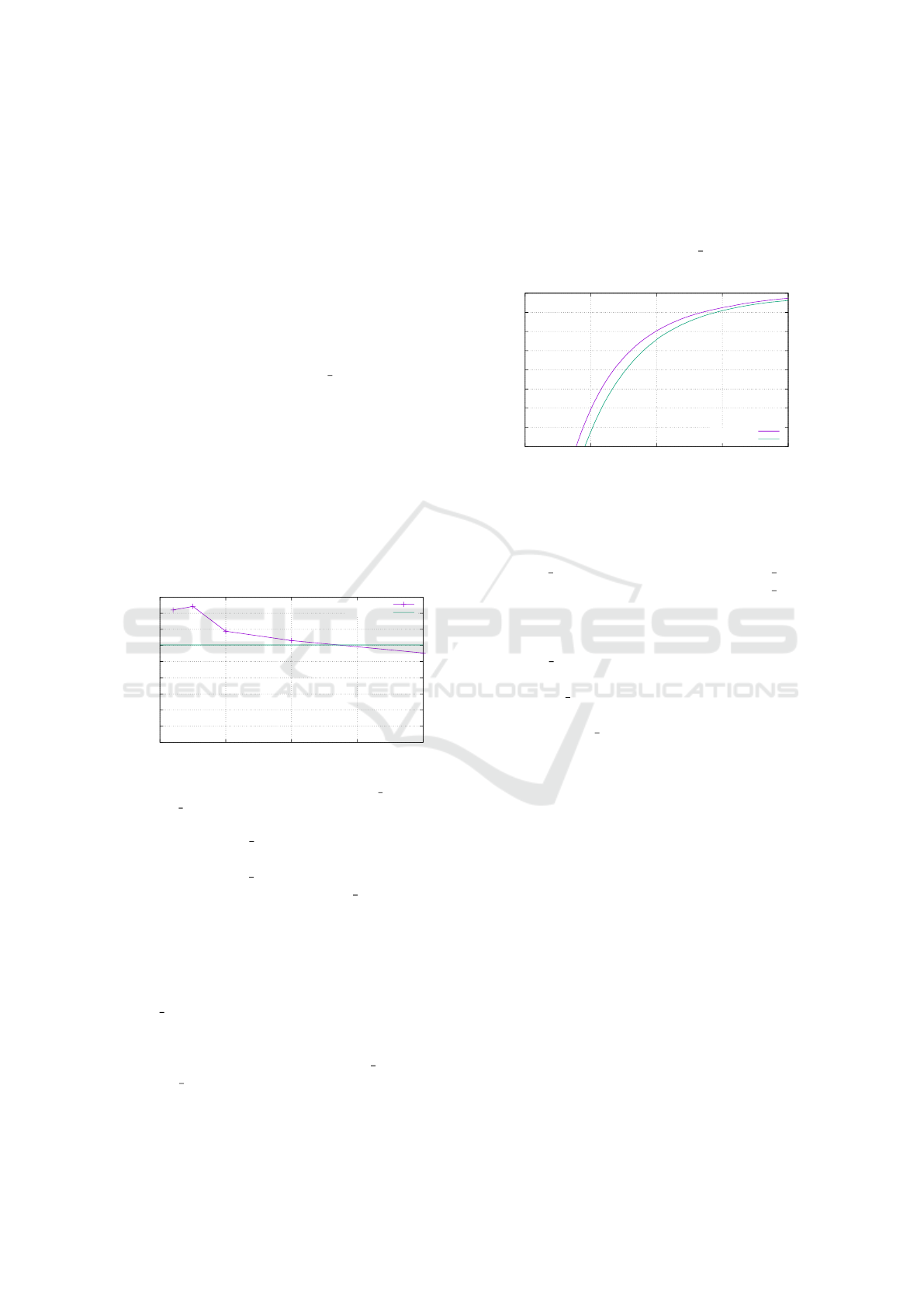
In another 1-min experiment, the context switches
in the platform throughout the whole run have been
counted, in order to highlight how many additional
context switches can happen with too small of a pe-
riod. Results are reported in Figure 4. With a pe-
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 500 1000 1500 2000
Context switches (x10
6
)
Period when using SCHED_DL
SCHED_DL
SCHED_FIFO
Figure 4: Number of context switch for SCHED DEADLINE
and SCHED FIFO, when varying the reservation periods.
riod of 2ms, SCHED DEADLINE achieves a reduc-
tion in the number of context switches of about 10%
compared to SCHED FIFO. However, using arbi-
trarily small periods can lead SCHED DEADLINE to
overwhelm the platform with an excess of context
switches (e.g., +40% extra context switches with a
100µs period).
Temporal Isolation. The advantage of using
SCHED DEADLINE resides in its capability to provide
temporal isolation with a specific time granularity
among workers. In this section, this is highlighted
through an experiment comparing SCHED
DEADLINE
vs SCHED FIFO in presence of an anomalous traffic
overloading one of the workers. The overload has
been simulated by using a higher probability of 0.475
for one of the workers and a lower probability of
0.075 for the remaining 7 workers. Then, raising the
overall traffic rate to λ
G
= 25000pkt/s, we obtained 7
individual rates at the usual 1875pkt/s while the 8th
individual rate is at the higher value of 11875pkt/s.
Budgets and periods for SCHED DEADLINE have
been set to 900µs and 1000µs, respectively.
60
65
70
75
80
85
90
95
100
0 500 1000 1500 2000
Probability (0-100)
Response time (us)
SCHED_DL
SCHED_FIFO
Figure 5: Response time CDFs in the presence of overload,
obtained under the scenario of Section 5.2.
Figure 5 compares the response-time CDF ob-
tained for one of the regular workers when us-
ing SCHED DEADLINE and when using SCHED FIFO.
The response times are higher under SCHED FIFO,
due to the interference of the overloaded worker, ex-
hibiting a +300us increase in the 99th percentile of
the response times compared to the ones obtained un-
der SCHED DEADLINE. On the other hand, the over-
loaded worker managed to serve 26% more packets
under SCHED FIFO, because its computing capabili-
ties were not restricted by the scheduling budget as in
the case of SCHED DEADLINE, as expected.
6 RELATED WORK
In the context of the Long Term Evolution (LTE) tech-
nology, virtualization-based mobile network architec-
tures are now widely accepted, and NFV is now rec-
ognized as an established solution to be deployed in
core networks and data centers (Zaki et al., 2011;
Sama et al., 2015; Nguyen et al., 2016). However,
scarce attention has been dedicated so far to the prob-
lem of QoS assurance in edge nodes. This paper tries
to fill this gap by addressing predictable execution
within edge nodes to ensure QoS control and tem-
poral isolation, by resorting to an EDF-based real-
time scheduling strategy. On a related note, in (Jansen
and Mullender, 2003) authors propose to apply EDF-
based real-time scheduling within a Plan9-based ex-
perimental base-station software stack, albeit the fo-
cus of the work is on preventing priority inversion
through a specific deadline inheritance mechanism.
Temporal Isolation Among LTE/5G Network Functions by Real-time Scheduling
373

A similar approach has been more recently presented
in (Vitucci et al., 2014), but no attempt has been made
to build a precise model of the function that takes
properly into consideration the scheduling parame-
ters, as done in this paper.
The problem of resource partitioning for tempo-
ral isolation has been largely investigated in the real-
time scheduling literature. The main concern in this
regard was to ensure that multiple software compo-
nents could be deployed on the same physical cores
ensuring that any task overrun could not affect the
execution of other tasks and disrupt system integrity.
This need mainly arises whenever a timely service has
to be ensured in a system with heterogeneous timing
requirements or dynamic computational workload.
To achieve this property, several different Resource
Reservation algorithms have been developed. The
earliest examples (Rajkumar et al., 1998; Abeni and
Buttazzo, 1998) have been developed in the context
of multimedia applications, with the intent to offer
predictable levels of quality-of-service (QoS) to real-
time workload in highly heterogeneous environments.
Resource reservation techniques, which had origi-
nally been proposed for the execution of indepen-
dent tasks on single-core systems, were also extended
to cope with hierarchical scheduling systems (Feng
and Mok, 2002) and multi-core platforms (Shin et al.,
2008; Easwaran and Andersson, 2009).
The effectiveness of these scheduling mechanisms
is also supported by the recent introduction of the
SCHED DEADLINE scheduling class in the Linux ker-
nel (Lelli et al., 2016). Traditional Linux schedul-
ing classes either do not provide real-time guaran-
tees (see SCHED OTHER policy, which schedules ac-
tivities in a best-effort way), or implement priority-
based real-time scheduling with no resource reserva-
tion capabilities (see SCHED FIFO or SCHED RR poli-
cies). Vice versa, SCHED DEADLINE allows com-
bining traditional multi-core scheduling with resource
reservations using a variant of the Constant Band-
width Server (CBS) algorithm (Abeni and Buttazzo,
1998) to obtain temporal isolation among tasks. In-
terestingly, SCHED
DEADLINE does not require any
particular assumption on tasks characteristics, allow-
ing it to serve highly heterogeneous workloads.
A remarkable work in this area has been carried
out in the context of the IRMOS European project
5
,
where an implementation of the EDF/CBS algorithm
within the Linux kernel has been used to provide
strong scheduling guarantees to KVM-based VMs
running in a virtualized real-time cloud infrastructure.
However, one of the critical issues that emerged was
the one of tuning proper values for the scheduling pa-
5
http://http://www.irmosproject.eu/
rameters, and how to link them to the overall perfor-
mance of the deployed application. In this work, we
mark a significant step forward in such an issue, de-
veloping a closed-form mathematical model capable
of capturing the relationship between system configu-
ration, input traffic characterization and expected per-
formance of the virtualized network functions.
7 CONCLUSIONS AND FUTURE
WORK
In this paper, an approach has been proposed to
provide temporal guarantees to LTE traffic pro-
cessing functions, based on the SCHED DEADLINE
Linux scheduler. This allows for modelling the per-
formance of individual functions applying classical
queueing theory. Experimental data shows that the
proposed model matches the application behavior.
SCHED DEADLINE allows for controlling the compu-
tational bandwidth ratio dedicated to each function, as
well as the time granularity of the schedule.
The presented model is shown to provide easy-to-
use closed-form formulas under Poissonian traffic as-
sumptions, providing insightful relationships among
parameters related to the system and scheduler con-
figuration, and expected performance figures.
The presented work has various limitations that
need to be addressed in additional future research.
First, the proposed methodology needs to be applied
in a more realistic scenario, where multiple cells sub-
mit traffic to functions deployed throughout a dis-
tributed NFV infrastructure. Second, the paper fo-
cused on CPU-dominated workloads, but in real life,
there will also be a mix of data-intensive activities that
saturate disk access or available NIC bandwidth, be-
fore the CPU. The modeling and analysis technique
needs to be extended to cope with these more involved
scenarios. Furthermore, it would be interesting to ver-
ify what integration issues arise for integrating the
reservation scheduler paradigm within a real NFV in-
frastructure. This might be done, e.g., extending OP-
NFV
6
or other frameworks.
REFERENCES
(2015). Cloud RAN – Ericsson White Paper.
www.ericsson.com/res/docs/whitepapers/wp-
cloud-ran.pdf.
(2015). Common Public Radio Interface (CPRI) v7.0 –
6
https://www.opnfv.org/
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
374

Interface Specification. http://www.cpri.info/
downloads/CPRI_v_7_0_2015-10-09.pdf.
(2016). Cisco 5G Vision Series: Small Cell Evolution.
Cisco Whitepaper.
Abeni, L. and Buttazzo, G. (1998). Integrating multimedia
applications in hard real-time systems. In Proc. IEEE
Real-Time Systems Symposium, pages 4–13, Madrid,
Spain.
Armbrust, M., Fox, A., Griffith, R., Joseph, A. D., Katz,
R. H., Konwinski, A., Lee, G., Patterson, D. A.,
Rabkin, A., Stoica, I., and Zaharia, M. (2009). Above
the clouds: A berkeley view of cloud computing.
Technical Report UCB/EECS-2009-28, EECS De-
partment, University of California, Berkeley.
Benini, L., Bogliolo, A., and Micheli, G. D. (2000). A
survey of design techniques for system-level dynamic
power management. IEEE Transactions on Very Large
Scale Integration (VLSI) Systems, 8(3):299–316.
Costa-Perez, X., Swetina, J., Guo, T., Mahindra, R., and
Rangarajan, S. (2013). Radio access network virtual-
ization for future mobile carrier networks. IEEE Com-
munications Magazine, 51(7):27–35.
Easwaran, A. and Andersson, B. (December 2009). Re-
source sharing in global fixed-priority preemptive
multiprocessor scheduling. In Proceedings of the 30th
IEEE Real-Time Systems Symposium (RTSS), Wash-
ington, DC, USA.
Feng, X. and Mok, A. K. (December 2002). A model of
hierarchical real-time virtual resources. In Proceed-
ings of the 23rd IEEE Real-Time Systems Symposium
(RTSS), Austin, TX, USA.
Fiorani, M., Skubic, B., M
˚
artensson, J., Valcarenghi, L.,
Castoldi, P., Wosinska, L., and Monti, P. (2015). On
the design of 5G transport networks. Photonic Net-
work Communications, 30(3):403–415.
Goossens, J., Funk, S., and Baruah, S. (2003). Priority-
driven scheduling of periodic task systems on multi-
processors. Real-Time Systems, 25(2):187–205.
Gross, D., Shortle, J. F., Thompson, J. M., and Harris, C. M.
(2008). Fundamentals of Queueing Theory. Wiley-
Interscience, 4th edition.
Haberland, B., Derakhshan, F., Grob-Lipski, H., Klotsche,
R., Rehm, W., Schefczik, P., and Soellner, M. (2013).
Radio base stations in the cloud. Bell Labs Technical
Journal, 18(1):129–152.
Hawilo, H., Shami, A., Mirahmadi, M., and Asal, R. (2014).
NFV: state of the art, challenges, and implementation
in next generation mobile networks (vepc). IEEE Net-
work, 28(6):18–26.
Jansen, P. G. and Mullender, S. (2003). Real-time in plan 9
: a short overview.
Kendall, D. G. (1953). Stochastic processes occurring in
the theory of queues and their analysis by the method
of the imbedded markov chain. The Annals of Mathe-
matical Statistics, 24(3):338–354.
Lelli, J., Scordino, C., Abeni, L., and Faggioli, D. (2016).
Deadline scheduling in the linux kernel. Software:
Practice and Experience, 46(6):821–839.
Liu, C. L. and Layland, J. W. (1973). Scheduling algo-
rithms for multiprogramming in a hard-real-time en-
vironment. Journel of the ACM, 20(1):46–61.
L
´
opez-P
´
erez, D., Ding, M., Claussen, H., and Jafari,
A. H. (2015). Towards 1 gbps/ue in cellular sys-
tems: Understanding ultra-dense small cell deploy-
ments. IEEE Communications Surveys Tutorials,
17(4):2078–2101.
Maaref, A., Ma, J., Salem, M., Baligh, H., and Zarin, K.
(2014). Device-centric radio access virtualization for
5g networks. In 2014 IEEE Globecom Workshops (GC
Wkshps), pages 887–893.
Mercer, C. W., Savage, S., and Tokuda, H. (1993). Proces-
sor Capacity Reserves: An Abstraction for Managing
Processor Usage. In Proc. 4th Workshop on Worksta-
tion Operating Systems.
NFV Industry Specif. Group (2012). Network Functions
Virtualisation. Introductory White Paper.
Nguyen, V.-G., Do, T.-X., and Kim, Y. (2016). Sdn and
virtualization-based lte mobile network architectures:
A comprehensive survey. Wireless Personal Commu-
nications, 86(3):1401–1438.
Pichon, D. (2014). Mobile Cloud Networking FP7 Euro-
pean Project: Radio Access Network as a Service. 4th
Workshop on Mobile Cloud Networking. Available
at: http://docplayer.net/3714038-Mobile-
cloud-networking-fp7-european-project-
radio-access-network-as-a-service.html.
Rajkumar, R., Juvva, K., Molano, A., and Oikawa, S.
(January 1998). Resource kernels: A resource-
centric approach to real-time and multimedia systems.
In SPIE/ACM Conference on Multimedia Computing
and Networking, San Jose, CA, USA.
Sama, M. R., Contreras, L. M., Kaippallimalil, J., Akiyoshi,
I., Qian, H., and Ni, H. (2015). Software-defined con-
trol of the virtualized mobile packet core. IEEE Com-
munications Magazine, 53(2):107–115.
Shin, I., Easwaran, A., and Lee, I. (July 2008). Hierarchical
scheduling framework for virtual clustering of multi-
processors. In 20th Euromicro Conference on Real-
Time Systems (ECRTS), Prague, Czech Republic.
Vitucci, C., Lelli, J., Parri, A., and Marinoni, M. (2014). A
Linux-based Virtualized Solution Providing Comput-
ing Quality of Service to SDN-NFV Telecommunica-
tion Applications. In Proceedings of the 16th Real
Time Linux Workshop (RTLWS 2014), pages 12–13,
Dusseldorf, Germany.
Zaki, Y., Weerawardane, T., Gorg, C., and Timm-Giel, A.
(May 2011). Multi-qos-aware fair scheduling for LTE.
In 73rd IEEE Vehicular technology conference (VTC-
Spring), Budapest, Hungary.
Temporal Isolation Among LTE/5G Network Functions by Real-time Scheduling
375
