
Zero-shot Object Prediction using Semantic Scene Knowledge
Rene Grzeszick and Gernot A. Fink
Department of Computer Science, TU Dortmund University, Dortmund, Germany
{rene.grzeszick, gernot.fink}@tu-dortmund.de
Keywords:
Zero-shot, Object Prediction, Scene Classification, Semantic Knowledge.
Abstract:
This work focuses on the semantic relations between scenes and objects for visual object recognition. Se-
mantic knowledge can be a powerful source of information especially in scenarios with few or no annotated
training samples. These scenarios are referred to as zero-shot or few-shot recognition and often build on visual
attributes. Here, instead of relying on various visual attributes, a more direct way is pursued: after recognizing
the scene that is depicted in an image, semantic relations between scenes and objects are used for predicting
the presence of objects in an unsupervised manner. Most importantly, relations between scenes and objects can
easily be obtained from external sources such as large scale text corpora from the web and, therefore, do not
require tremendous manual labeling efforts. It will be shown that in cluttered scenes, where visual recognition
is difficult, scene knowledge is an important cue for predicting objects.
1 INTRODUCTION
Much progress has been made in the field of image
classification and object detection, yielding impres-
sive results in terms of visual analysis. Latest re-
sults show that up to a thousand categories and more
can be learned based on labeled instances (Simonyan
and Zisserman, 2014). In comparison, it is estimated
that humans recognize about 30.000 visual categories
and even more sub-categories such as car brands or
animal breeds (Palmer, 1999). Human learning is
different from machine learning, although it can be
based on visual examples, it is also based on exter-
nal knowledge such as descriptions of entities or the
context in which they appear. Recognition systems
often omit basic knowledge on a descriptive level.
This work will focus on the semantic relations be-
tween scenes and objects which can be an important
cue for predicting objects. This is especially useful
in cluttered scenes where visual recognition may be
difficult. Knowing the scene context, which yields a
strong prior on what to expect in a given image, the
presence of objects in an image will be predicted.
It is known that contextual information can help in
the task of recognizing objects (Divvala et al., 2009;
Choi et al., 2012; Zhu et al., 2015). Various forms of
context that can improve visual recognition tasks have
already been investigated in (Divvala et al., 2009). Vi-
sual context can be obtained in a very local manner
such as pixel context or in a global manner by image
descriptors like the Gist of a scene (Oliva and Tor-
ralba, 2006). Another form of visual context is the
presence, appearance or location of different objects
in a scene. External context cues are, for example,
of photogrammetric, cultural, geographic or semantic
nature (Divvala et al., 2009).
Especially the object level approaches that de-
fine context based on the dependencies and co-
occurrences of different objects are pursued in sev-
eral works (Felzenszwalb et al., 2010; Choi et al.,
2012; Vezhnevets and Ferrari, 2015). In (Felzen-
szwalb et al., 2010) a stacked SVM classifier is ap-
plied that uses the maximal detection scores for each
object category in an image in order to re-rank the
prediction scores. The work presented in (Choi et al.,
2012) uses a hierarchical tree structure in order to
model the occurrence of objects as well as a spatial
prior. In (Vezhnevets and Ferrari, 2015) the detec-
tion scores of a specific bounding box are re-ranked
based on its position in the scene as well as the relative
position of other bounding boxes. More global ap-
proaches use image level context definitions for object
detection or image parsing (Liu et al., 2009; Tighe and
Lazebnik, 2010; Modolo et al., 2015). Most of these
context definitions follow the same approach: They
retrieve a subset of training images which are simi-
lar to the given image and transfer the object infor-
mation (Liu et al., 2009; Tighe and Lazebnik, 2010).
A slightly different approach is pursued in (Modolo
et al., 2015), where a Context Forest is trained that
120
Grzeszick R. and Fink G.
Zero-shot Object Prediction using Semantic Scene Knowledge.
DOI: 10.5220/0006240901200129
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 120-129
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

learns the relation between a global image descrip-
tor and the objects within this image. This allows to
efficiently find related images based on the forest’s
leaf nodes and then transfer assumptions about ob-
ject locations or classes. Most of these works have in
common that a considerable effort went into training
a state-of-the-art detector and the results of various
detections are combined in order to obtain a context
descriptor. In (Felzenszwalb et al., 2010; Choi et al.,
2012; Modolo et al., 2015) these were deformable
part based models that build on HOG features. Nowa-
days, Convolutional Neural Networks (CNNs), like
very deep CNNs (Simonyan and Zisserman, 2014)
and R-CNNs (Girshick et al., 2016; Ren et al., 2015)
show state-of-the-art performance in object prediction
and object detection respectively. While methods like
data augmentation and pre-training have reduced the
required number of samples and weakly supervised
annotation schemes lower the required level of de-
tail, still a considerable annotation effort is required
to train these models.
A different idea is adding further modalities for
context. The most prominent of these modalities is
text, for example, image captions or additional tags
(Lin et al., 2014). These multi-modal approaches al-
low for answering visual queries (Zhu et al., 2015;
Wu et al., 2016; Krishna et al., 2016), the caption-
ing of images or videos (Rohrbach et al., 2013; Don-
ahue et al., 2015) and recognition with limited train-
ing samples supported by additional linguistic knowl-
edge (Rohrbach et al., 2011; Lampert et al., 2014).
Several of these approaches incorporate additional at-
tributes that allow for transferring knowledge with-
out explicitly annotating a specific class or object la-
bel (Rohrbach et al., 2011; Lampert et al., 2014; Zhu
et al., 2015). For example, instead of recognizing an
animal, visual attributes like its color, whether it has
stripes or is shown in water are recognized. These
attributes can then be used as additional visual cues.
In (Patterson et al., 2014) a database that focuses
on scene attributes is introduced. Each scene is de-
scribed based on its visual attributes such as natural
or manmade. Attributes are predicted independently
of each other using one SVM per attribute. Follow-
ing up on the idea of attribute prediction, it has been
shown that a combined prediction of these attributes
can be beneficial as they are often correlated. In
(Grzeszick et al., 2016) a neural network is trained
that predicts multiple attributes simultaneously and
outperforms the traditional per class SVMs on scene
attributes.
In (Zhu et al., 2015) a knowledge base system is
built that builds on a similar idea and relates scenes
with attributes and affordances. It is shown that the
association of scenes with attributes and affordances
allows for improving the predictions of scenes and
their attributes as well as answering visual queries.
An even more complex system is presented in the Vi-
sual Genome (Krishna et al., 2016) where a complete
scene graph of objects, attributes and their relations
with each other is presented. This allows not only
for predicting attributes and relations, but also for an-
swering complex visual questions. Textual queries
are parsed with respect to attributes so that the best
matching images can be retrieved.
In (Lampert et al., 2014) attributes, which are as-
sociated with a set of images or classes, are used for
uncovering unknown classes and describing them in
terms of their attributes. For example, an animal with
the attributes black, white and stripes will most likely
be a zebra. Each of the attributes is recognized inde-
pendently and without any knowledge about the ac-
tual object classes. The attribute vector is then used
in order to infer knowledge about object classes. Such
methods with no training samples for given objects
are also referred to as zero-shot learning approaches.
Similarly, given a very small set of training samples,
attributes can be used in order to transfer class labels
to unknown images (Rohrbach et al., 2011).
Attributes for images can either be learned di-
rectly via annotated training images or indirectly via
additional sources of information such as Wikipedia
or WordNet (Lampert et al., 2014; Rohrbach et al.,
2011). As annotating images with attributes is te-
dious, especially, the latter allows for scaling recog-
nizers to a larger number of classes and attributes.
Furthermore, it has been shown that these attributes
can also be derived in a hierarchical manner, i.e.,
based on the WordNet tree (Rohrbach et al., 2011).
An important factor for incorporating such additional
linguistic sources is the vast amount of text corpora
that are available on the web. Information extraction
systems like TextRunner (Banko et al., 2007) or Re-
verb (Etzioni et al., 2011) allow for analyzing these
text sources and uncovering information, like nouns
and the relations between them.
This work will show that additional textual infor-
mation is beneficial for predicting object presence in
an image with minimal annotation effort similar to
(Lampert et al., 2014; Rohrbach et al., 2011; Zhu
et al., 2015). Here, instead of attributes, a more di-
rect way is proposed exploiting the semantic relations
between scenes and objects in a zero-shot approach.
The presence of an object is predicted based on two
sources: visual knowledge about the scene and the re-
lations between scenes and different objects. For ex-
ample, a car can hardly be observed in the livingroom
or a dining table in the garage. Such knowledge can
Zero-shot Object Prediction using Semantic Scene Knowledge
121
Scene-LvL CNN
Scene Images
...
Text corpora
Relations
<Scene|R| Obj >
< Obj |R|Scene>
Matrix of Objects
in Scene Context
( )
s
0
o
0
s
n
o
0
s
n
o
m
s
0
o
m
...
...
.
.
.
Object
Presence
Presence
Prediction
P(o|s)=
P(s|o) P(o)
P(s)
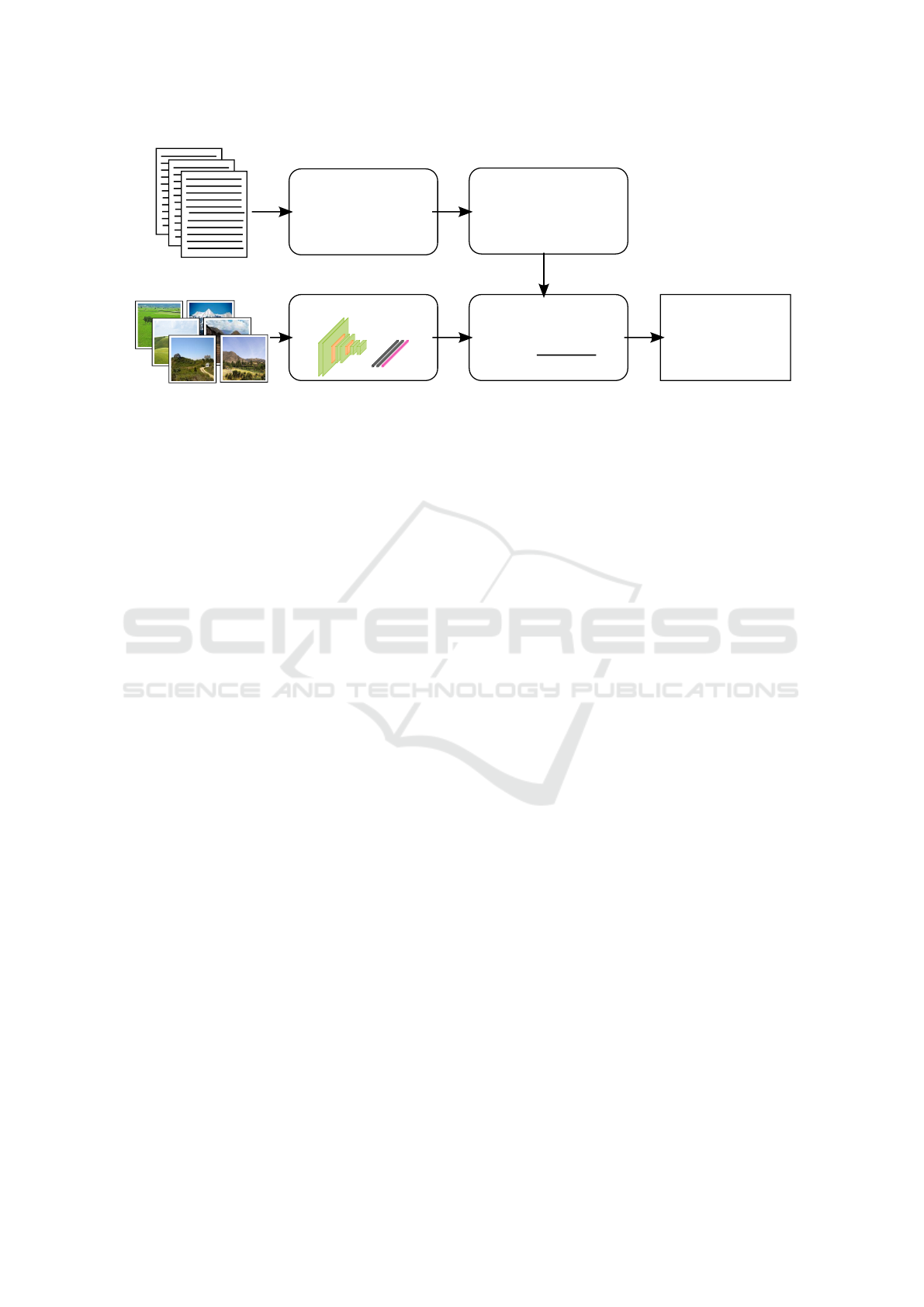
Figure 1: Given external text sources, these are analyzed with respect to possible scenes, objects and their relations, creating
a matrix of objects in scene context. For a given set of images, a CNN is trained in order to predict scene labels. This
information is then used in order to predict the presence of an object in scene.
easily be obtained from additional textual sources us-
ing methods like TextRunner (Banko et al., 2007) or
Reverb (Etzioni et al., 2011). As a result the tremen-
dous annotation effort that is required for annotating
objects in images is no longer necessary. Similar to
existing zero-shot approaches, it requires only a de-
scriptive label, the scene name, and works completely
unsupervised with respect to annotations of objects.
In the experiments it will be shown that such high
level knowledge allows for predicting the presence of
objects, especially in very cluttered scenes.
2 METHOD
In the proposed method for object prediction, the rela-
tions between scenes and objects which are obtained
from text sources are used for modeling top-down
knowledge. They replace the visual information that
is typically used for object prediction. An overview
is given in Fig. 1. The image is solely analyzed on
scene level, which requires minimal annotation effort
and no visual knowledge about the objects within the
scene. More importantly, a text corpus is analyzed
with respect to possible scenes and objects, extracting
the relations between them and creating a matrix of
objects in a scene context. This information is then
used in combination with the scene classification in
order to predict the presence of an object in an image.
2.1 Relations between Objects and
Scenes
Given a large enough set of text, relations extracted
from these texts can be assumed to roughly repre-
sent relations that are observed in the real world and
henceforth may also be observed on images. Rich
text corpora can, for example, be obtained by crawl-
ing Wikipedia or any other source of textual informa-
tion from the web (Rohrbach et al., 2011). Here, sen-
tences including possible scene or object categories
and their relations will be of further interest. In the
following extractions based on Reverb (Etzioni et al.,
2011) are used. Reverb extracts relations and their ar-
guments from a given sentence. Therefore, two steps
are performed: First, for each verb v in the sentence,
the longest sequence of words r
v
is uncovered so that
r
v
starts at v and satisfies both a syntactical and a lex-
ical constraint. For the lexical constraint, Reverb uses
a dictionary of 1.7 million relations. The syntactical
constraint is based on the following regular expres-
sion:
V |V P|VW
∗
P
V = verb particle? adv?
W = (noun|adj|adv|pron|det)
P = (prep|particle|inf. marker) (1)
Overlapping sets of relations are merged into a single
relation. Second, given a relation r, the nearest noun
left and right of the relation r are extracted. If two
nouns can be observed for a relation r, this results in
a triplet
t = (arg1, r, arg2) . (2)
Simple examples relating scenes and objects may be
’A car drove down the street’ or ’Many persons were
on the streets’. Both relate an entity that is typically
used in object detection (car or person) with a scene
label (street). In this example, the triplets
t
0
= (car, drove down, street) ,
t
1
= (person, were on, street)
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
122

would be extracted from the two sentences.
Given a set of relations that were extracted from
a text corpus and a vocabulary that defines a set of S
scene names and O object names, a matrix C describ-
ing the objects in scene context is created. In a general
setting a vocabulary could be derived from frequently
occurring words in a text corpus, the WordNet tree
(Miller and Others, 1995) or just a set of objects and
scenes that are of interest and known beforehand. At
the index s, o the matrix C contains the number of
relations between the respective scene s and object o:
C
s,o
=
∑
r
n(o, s) +
∑
r
n(s, o) with (3)
n(i, j) = #{t = (i, ·, j)} . (4)
Hence, the type of relation is discarded as only the
number of relations between an object and a scene
will be of further interest. In the experiments, some
rare cases of self-similarity were observed, in which a
scene and an object name are the same (e.g. a scene in
a street may also show the object road/street, among
others). In these cases the self-similarity is set to the
maximum count observed.
2.2 Presence Prediction
The task of presence detection is concerned with the
question whether an object can be observed one or
more times in a given image. Under the assumption
that a large diverse text corpus is representative for
the real world, it can further be assumed that the like-
lihood of an object to occur in a given scene is cor-
related with the number of textual relations between
those entities. Since multiple objects can occur in a
single scene image, the presence predictions for dif-
ferent object classes are typically evaluated indepen-
dently of each other. Due to this multiplicity, the
probability P(o|s) of the object o to be shown in the
scene s cannot be computed directly using the counts.
However, since an image can only depict one scene,
P(s|o) can be estimated from the counts. This allows
to compute P(o|s) based on Bayes theorem as
P(o|s) =
P(s|o)P(o)
P(s)
with
P(s|o) =
C
s,o
∑
s
0
C
s
0
,o
and P(o) =
∑
s
C
s,o
∑
s
0
∑
o
0
C
s
0
,o
0
. (5)
The prior probability P(o) can be approximated, as-
suming that one relation count represents the presence
of at least one object o.
However, for the same reason P(o|s) cannot be de-
rived from the matrix of objects in scene context, the
prior probability P(s) for a certain scene cannot be
derived. Assume the Matrix C contains N relation
counts which relate the presence of at least N objects
from O categories to the set of S scenes. Given the
one to many relation between a scene and objects, the
true count of scenes cannot be recovered. Therefore,
P(s) is assumed to be uniformly distributed.
In order to be able to predict an object in a scene
where no relations have been previously observed,
unobserved events need to be handled. Therefore,
the probability of an object o to occur in a scene s
is smoothed by
P
∗
(o|s) = (1 − α) P(o|s) + α P(o) , (6)
similar to the smoothing of probability distributions
for statistical natural language processing (cf. (Man-
ning and Sch
¨
utze, 1999)). The process is based on an
interpolation factor α which is estimated based on the
number of relations with only a single occurrence:
α =
#{C
o,s
|C
o,s
= 1}
∑
o
0
∑
s
0
C
o
0
,s
0
(7)
Furthermore, the counts are obtained from a text
source that is unrelated to the visual tasks so that there
is a remaining degree of uncertainty. The matrix rep-
resentation does also not cover intra-scene variability
(i.e. all scenes would have exactly the same relation
to objects). In order to model these two issues,
ˆ
P(o|s)
is sampled by D draws from a normal distribution
ˆ
P(o|s) =
1
D
D
∑
1
n with n ∼ N (P
∗
(o|s), σ(C)) .
(8)
The variance σ is estimated based on the variance
within the matrix C. In order to estimate the prob-
ability of an object in a given image I, the presence is
then predicted by:
P(o|I) =
∑
s
P(s|I) ·
ˆ
P(o|s) . (9)
The probability P(s|I) can be predicted by a classifier.
Assuming a perfect classification P(s|I) would equal
to one for the true scene s and the probability P(o|I)
would solely be computed based on the relations be-
tween this scene and the objects. However, in practice
there will be a distribution over a set of scene labels.
This also takes into account the ambiguity between
different scenes. In this work, a CNN that is based on
a VGG16 network architecture is used for predicting
the scene category (Simonyan and Zisserman, 2014).
The network is pre-trained on ImageNet. It is then
adapted to the scene classification using a set of scene
images depicting S scenes categories.
Note that the requirement for a single scene label
is very easy to fulfill. The annotation effort for a sin-
gle scene label is much lower than labeling various
Zero-shot Object Prediction using Semantic Scene Knowledge
123

object classes in an image or even annotating the po-
sition of an object in a scene which has to be done for
most supervised object detectors. Similar to attribute-
based zero-shot learning, it is a descriptive abstraction
that does not imply any visual knowledge about the
objects within the scene.
3 EVALUATION
In the following the experimental setup and the evalu-
ation of the proposed object prediction are described.
Ideally, the evaluation requires a dataset that offers
both scene and object labels. Hence, the different
branches of the SUN dataset (Xiao et al., 2014) have
been chosen for the evaluation: The SUN2012 Scene
and Object Dataset in Pascal VOC format and the
SUN2009 Context dataset. Both branches of the SUN
dataset show a broad set of different scene and object
categories.
SUN2012 Scene and Object Dataset in Pascal VOC
format: the dataset contains a set of images taken
from the SUN image corpus. While the more promi-
nent SUN397 dataset is annotated with 397 different
scenes labels, this set contains annotations for an ad-
ditional 4, 919 different object classes (Xiao et al.,
2014). Of all 16, 873 images, 11, 426 are a subset
of the SUN397 dataset for which both annotations,
scene and object labels, are available. For the remain-
ing 5, 447 no scene annotations are provided.
SUN2009 Context: the dataset contains only about
200 different object categories, of which 107 were
used for supervised detection experiments in (Choi
et al., 2012). The same diversity as for the SUN2012
Scene and Object dataset can be observed with respect
to the scene and object categories.
In contrast to traditional object detection tasks,
like the Pascal VOC challenge (Everingham et al.,
2015), there is a great variability with respect to the
objects properties. While some of them are well de-
fined (e.g. cars, person), some others describe regions
(sky, road, buildings) or highly deformable objects
(river, curtain). Moreover, the annotations in all ver-
sions of the SUN dataset are very noisy. Some of them
contain descriptive attributes, like person walking, ta-
ble occluded, tennis court outdoor others mix singular
and plural.
In order to relate the scene and object labels with
natural text, these descriptive attributes were removed
and all objects and scene labels were lemmatized
based on the WordNet tree (Miller and Others, 1995).
This leaves 3, 390 unique object labels in 377 differ-
ent scenes labels. Although the lemmatized scene
names may be semantically similar, they may be vi-
sually different (i.e. for tennis court indoor and out-
door). Therefore, the scene labels for all 397 labels
will be predicted and the prediction results will be
summarized. The objects are then predicted based on
the lemmatized names.
3.1 Creating a Matrix of Objects in
Scene Context
In order to obtain a matrix of objects in scene con-
text, the OpenIE database has been queried. It con-
tains over 5 billion extractions that have been obtained
using Reverb on over a billion web pages
1
. Hence,
a very diverse dataset that captures the relations be-
tween a huge set of nouns has been used. The vo-
cabulary has been defined based on the task of the
SUN2012 Scene and Object dataset so that the vo-
cabulary consists of the S = 377 scene names and
O = 3390 object names. All possible combinations of
scenes and objects were queried for which a total re-
lation count of 1, 375, 559 has been extracted
2
. Note
that the distribution of these relation counts is very
long tailed, leaving a large set of unobserved events.
3.2 Scene Prediction
For recognizing objects based on the scene context,
the probability of the given image to depict the scene s
needs to be computed. In the following, two different
setups are evaluated.
Perfect Classifier: it is assumed that the scene label
is known beforehand (i.e. given by a human in the
loop) or that training a perfect scene classifier with
respect to the annotated scene labels would be possi-
ble. In order to simulate this case, P(s|I) is set to 1
for the annotated scene label and to 0 otherwise. Note
that these labels might be ambiguous and even human
annotators deviate in their decision from the ground
truth labels (Xiao et al., 2010).
Scene-level CNN: For recognizing scene labels a
CNN is evaluated. A VGG16 network architecture
has been pre-trained on ImageNet. It has then been
adapted to the task of scene classification using all
scene images from the SUN397 dataset that are not
included in the SUN2012 Scene and Object dataset.
The exclusion of the images from the SUN2012 Scene
1
For a demo see http://openie.allenie.org
2
The Matrix of Objects in Scene Context will
be made publicly available together with the de-
tailed experimental setup containing the training/test split
and the lemmatized annotations at http://patrec.cs.tu-
dortmund.de/cms/en/home/Resources/index.html.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
124
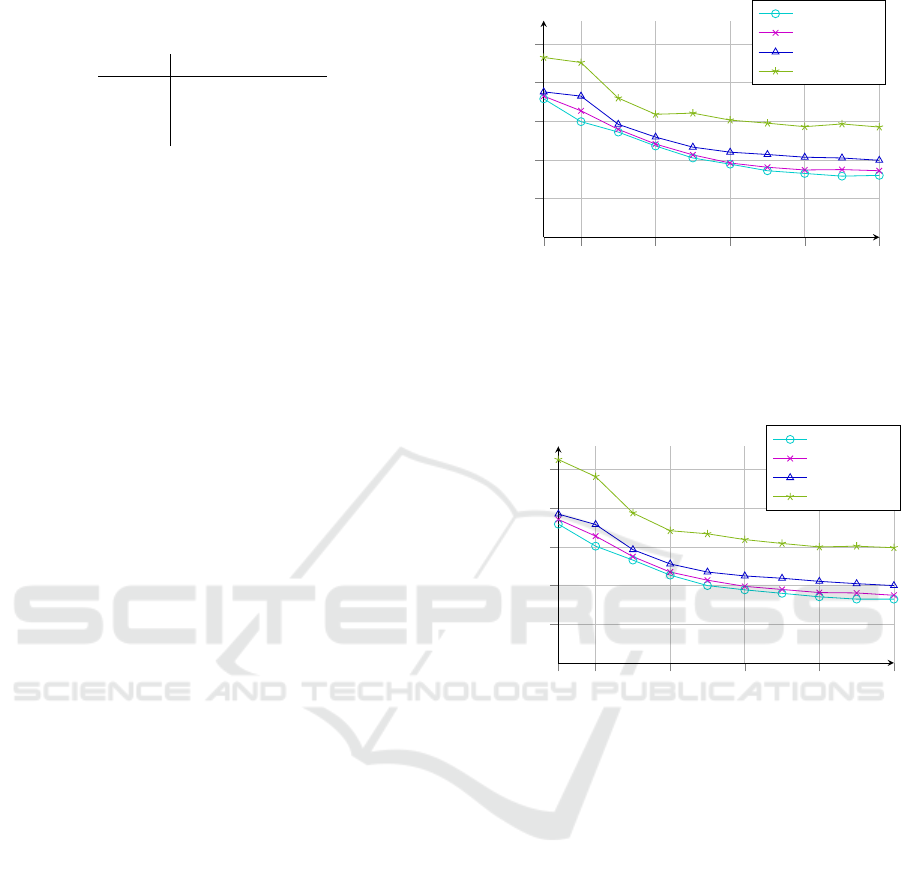
Table 1: Recognition rate for the k highest scoring predic-
tion of the scene label using a CNN.
k-best Recognition rate
1 62.2%
3 82.8%
5 88.9%
and Object dataset leaves a set of 97, 304 training im-
ages. The training images have been augmented using
random translations (0 − 5%), flipping (50% chance)
and Gaussian noise (σ = 0.02) in order to achieve a
better generalization. In total 500, 000 training im-
ages have been created. The learning rate has been
set to α = 0.0001 using 25, 000 training iterations of
batch size 39 (= 10% of the number of classes).
The CNN recognition rates for the k highest scor-
ing predictions on the SUN2012 Scene and Object
dataset are shown in Tab. 1. The highest scoring pre-
diction yields an accuracy of 62.2%. When consid-
ering that the correct result must be within the five
highest scoring predictions an accuracy of 88.9% is
achieved. This emphasizes that the probabilistic as-
signment to a set of scene categories based on the
CNNs predictions is a meaningful input for the pro-
posed object prediction.
3.3 Object Prediction
In the following experiments, the presence detection
is evaluated. Note that only scene labels were used for
training the CNN so that it is completely unsupervised
with respect to object occurrences.
SUN 2012 Scene and Object Dataset
For the SUN2012 Scene and Object dataset, the most
frequently occurring 100 up to all 3390 objects cat-
egories from the dataset were considered, some of
them being comparably rare. The accuracy of the top
k predictions is evaluated. Note that multiple objects
can occur in a single image and, therefore, the accu-
racy of all predictions is evaluated (i.e. for k = 2, both
predictions are compared to the ground truth so that
each one can be a correct or false prediction). Only
images with at least k annotated objects were used
for the evaluation. Figure 2 shows the results when
simulating a perfect classifier based on the annotated
scene labels and Fig. 3 shows the results when pre-
dicting P(s|I) using the CNN. For both experiments
the sampling parameter D has been set to 10.
Interestingly, the simulation of a perfect scene
classifier does not yield superior results compared to
those achieved by predicting the scene label using the
CNN. The reason for this is two fold: scenes are often
1 2 4
6
8 10
10
20
30
40
50
# Predictions
Accuracy [%]
All Objects
Top 2k Objects
Top 1k Objects
Top 100 Objects
Figure 2: Accuracy for the top k object predictions on the
SUN2012 Scene and Object Dataset. The scene label is pre-
dicted by simulating a perfect classifier. Hence, the object
prediction is only based on the number of relations between
the annotated scene and the set of objects.
1 2 4
6
8 10
10
20
30
40
50
# Predictions
Accuracy [%]
All Objects
Top 2k Objects
Top 1k Objects
Top 100 Objects
Figure 3: Accuracy for the top k object predictions on the
SUN2012 Scene and Object Dataset. The scene labels are
predicted using a CNN and the relations between the pre-
dicted scenes and the set of objects is used for predicting
the object presence.
ambiguous (cf. (Xiao et al., 2010)) and the prediction
using the CNN computes a probabilistic assignment
to a set of scenes. For example, a scene depicting a
cathedral, church or chapel may not only be visually
similar, but they are also similar on a semantic level.
As the distribution of objects in scene context is ob-
tained from a very general external text source, it does
not accurately match the ground truth distribution that
can be observed in the dataset. Hence, a mixture of
many scenes is more robust.
The results in Fig. 3 also show that even with-
out any knowledge about the visual appearance of an
object the highest ranking object predictions have a
precision of up to 52.6% when considering a set of
100 objects and 35.9% when considering as many as
3, 390 different object categories. However, as men-
tioned before, some of the objects describing regional
Zero-shot Object Prediction using Semantic Scene Knowledge
125
house, television, fireplace people, bridge, vehicle sofa, television, house
floor, sofa road, car floor, bed
Livingroom — Livingroom Highway — Highway Bedroom — Livingroom
information, people, floor shower, bath, floor parking, people, vehicle
text, book tub, bathtub road, car
Bookstore — Bookstore Bathroom — Bathroom Highway — Highway
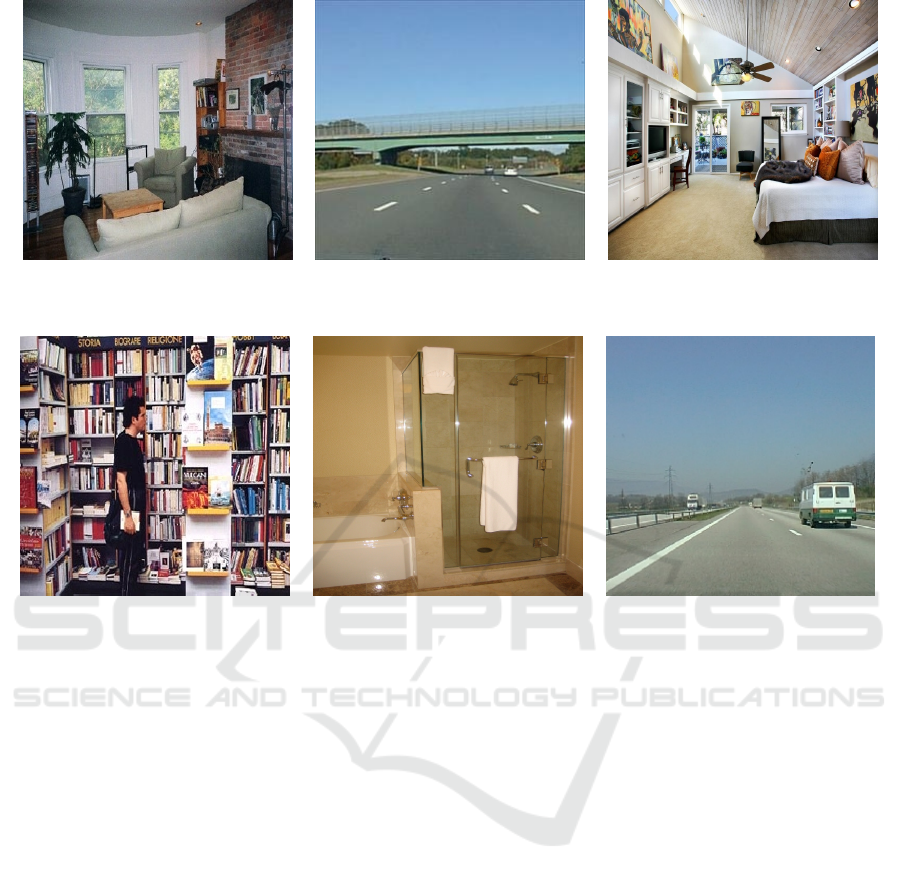
Figure 4: Further exemplary results showing the five highest scoring object predictions: (green) correct (red) wrong (red &
italic) wrong according to annotations, but can be seen in the image. In the bottom row: (left) Annotation (right) highest
scoring CNN prediction.
objects tend to be very general an can safely be as-
sumed to occur in most scenes.
Exemplary results showing the five highest scor-
ing object predictions for a given image are shown in
Fig. 4. It can be seen that although a large set of ob-
jects is annotated in the SUN dataset, the annotations
are noisy and not at all complete. Some of the predic-
tions that cannot be found in the ground truth anno-
tations might be deemed as correct. Predictions that
are not shown in the image, are often at least plau-
sible guesses what else could be found in the scene.
For example, people might be related to a highway
or street scene and a sofa might be related to an in-
door scene. The third example in the top row is a
typical case where the highest scoring prediction of
the CNN is incorrect. However, the prediction of liv-
ingroom instead of bedroom is not only visually but
also semantically related. The wall on the left with
the TV could also easily be placed in a livingroom.
Furthermore, due to the probabilistic assignment to a
set of scenes, the object class bed is still the fifth best
scoring prediction although no relation between liv-
ingroom and bed has been found in the external text
sources. The example of a bathroom in the bottom
row shows a typical example of ambiguity in natural
language as well as in the provided annotations.
In order to provide a more detailed analysis, dif-
ferent sets of object categories are evaluated based
on the VOC mean average precision (mAP) criterion
(Everingham et al., 2015). The results for the 20 to
100 most common objects in the dataset is given in
Tab. 2. The mAP of predicting an object by chance is
indicating how frequently these objects occur in the
dataset. For comparison, the ground truth distribution
of all scenes and objects, which has been observed in
the dataset, has been evaluated using the same model.
This can be seen as an indication of an upper bound
for the performance that could be obtained by solely
using the proposed model of scene and object rela-
tions. It can clearly be observed that the relations ob-
tained from the text sources do not model the distri-
bution in the dataset perfectly. The proposed method
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
126
Table 2: Mean average precision for different sets of objects on the SUN2012 dataset in Pascal format. The presence predic-
tions are based on the number of relations between the scenes and the objects. (1
st
col.) Simulation of a perfect classifier using
the ground truth scene labels (2
nd
col.) Scene labels are predicted using a CNN. For comparison the results of a prediction by
chance (3
rd
col.) and the results of the proposed method when using the true number of scene-object relations derived from
the dataset (4
th
col.) are also shown.
Objects Perfect Classifier Scene-level CNN Chance GT Distribution
mean AP [%] mean AP [%] mean AP [%] mean AP [%]
Top 20 34.7 38.5 21.6 54.1
Top 40 29.5 33.1 13.9 47.1
Top 60 24.2 27.3 10.3 43.2
Top 80 21.5 24.2 8.5 39.2
Top 100 19.4 22.1 7.2 35.9
Table 3: Mean average precision for the object presence in the SUN2009 Context dataset. (*) The CNN predicts one of the
397 scenes from the SUN397 dataset without any knowledge about the objects.
Method Annotations # Objects m AP[%]
Part based Models (Felzenszwalb et al., 2010) Cropped objects 107 17.9
PbM + Tree Context (Choi et al., 2012) Cropped objects 107 26.1
PbM + Context SVM (Choi et al., 2012) Cropped objects 107 23.8
Scene-level CNN + Objects in Context - (*) 107 19.1
Scene-level CNN + Objects in Context - (*) 104 19.8
shows promising results given the fact that the rela-
tions are obtained from arbitrary websites. The results
also show that there is potential for improvement if
the relation can be estimated in a more accurate man-
ner.
SUN2009 Context
In order to emphasize the difficulty of detecting ob-
jects with a huge variability, as depicted in the SUN
dataset, the approach has also been evaluated on
the 107 object categories of the SUN2009 Context
dataset. On this dataset, different object detectors
based on deformable part based models were trained
in a fully supervised manner and evaluated in (Choi
et al., 2012). The presence detection of the proposed
zero-shot method after predicting a scene label for
each of the scenes using the CNN is compared to the
supervised object detectors of (Choi et al., 2012).
The results are shown in Table 3. As the original
evaluation protocol contained three classes that were
filtered by the stemming (bottles, stones and rocks)
and can therefore not be recognized by the proposed
method, the results for all 107 classes as well as the
results for the remaining 104 classes after the stem-
ming are displayed. It is surprising that a model that
is solely based on scene-level predictions can achieve
comparable results to deformable part based models
that are trained completely supervised. Only with ad-
ditional contextual information the part based models
are able to outperform the proposed approach. This
clearly shows the requirement for contextual informa-
tion, especially since the since visual information in
cluttered scenes may be limited.
Note that although there is no evaluation of R-
CNNs on this task, they have surpassed deformable
part based models as the state-of-the-art in object de-
tection (Girshick et al., 2016). It can be assumed that
they outperform the part based models on this task
as well. Nevertheless, deformable part based models
are powerful object detectors and it is interesting that
an unsupervised approach can achieve similar results.
This shows that the relations between scenes and ob-
jects provide important cues for object prediction.
4 CONCLUSION
In this work a novel approach for predicting object
presence in an image has been presented. The method
works in a zero-shot manner and only relies on scene
level annotations from which a probability for an ob-
ject’s presence is derived. The probability is based
on the relations between scenes and objects that were
obtained from additional text corpora. As a result
the proposed method is completely unsupervised with
respect to objects and allows for predicting objects
without any visual information about them. In the
experiments it has been shown that it is possible to
predict the occurrences for as many as 3390 objects.
On tasks that are very difficult for visual classifiers,
such as cluttered scenes with not very well structured
objects, the approach yields similar performance to
Zero-shot Object Prediction using Semantic Scene Knowledge
127

visual object detectors that were trained in a fully su-
pervised manner.
ACKNOWLEDGEMENTS
This work has been supported by the German Re-
search Foundation (DFG) within project Fi799/9-1.
The authors would like to thank Kristian Kersting for
his helpful comments and discussions.
REFERENCES
Banko, M., Cafarella, M. J., Soderland, S., Broadhead, M.,
and Etzioni, O. (2007). Open information extraction
for the web. In IJCAI, volume 7, pages 2670–2676.
Choi, M. J., Torralba, A., and Willsky, A. S. (2012). A
tree-based context model for object recognition. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 34(2):240–252.
Divvala, S. K., Hoiem, D., Hays, J. H., Efros, A. A., and
Hebert, M. (2009). An empirical study of context in
object detection. In Proc. IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR), pages 1271–
1278.
Donahue, J., Anne Hendricks, L., Guadarrama, S.,
Rohrbach, M., Venugopalan, S., Saenko, K., and Dar-
rell, T. (2015). Long-term recurrent convolutional net-
works for visual recognition and description. In Proc.
IEEE Conf. on Computer Vision and Pattern Recogni-
tion (CVPR).
Etzioni, O., Fader, A., Christensen, J., Soderland, S., and
Mausam, M. (2011). Open information extraction:
The second generation. In IJCAI, volume 11, pages
3–10.
Everingham, M., Eslami, S. M. A., Van Gool, L., Williams,
C. K. I., Winn, J., and Zisserman, A. (2015). The pas-
cal visual object classes challenge: A retrospective.
International Journal of Computer Vision, 111(1):98–
136.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrim-
inatively trained part-based models. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
32(9):1627–1645.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2016).
Region-based convolutional networks for accurate ob-
ject detection and segmentation. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
38(1):142–158.
Grzeszick, R., Sudholt, S., and Fink, G. A. (2016). Opti-
mistic and pessimistic neural networks for scene and
object recognition. CoRR, abs/1609.07982.
Krishna, R., Zhu, Y., Groth, O., Johnson, J., Hata, K.,
Kravitz, J., Chen, S., Kalantidis, Y., Li, L., Shamma,
D. A., Bernstein, M., and Fei-Fei, L. (2016). Vi-
sual genome: Connecting language and vision using
crowdsourced dense image annotations.
Lampert, C. H., Nickisch, H., and Harmeling, S. (2014).
Attribute-based classification for zero-shot visual ob-
ject categorization. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 36(3):453–465.
Lin, T., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft coco: Common objects in context. In Proc.
European Conference on Computer Vision (ECCV),
pages 740–755. Springer.
Liu, C., Yuen, J., and Torralba, A. (2009). Nonpara-
metric scene parsing: Label transfer via dense scene
alignment. In Proc. IEEE Conf. on Computer Vision
and Pattern Recognition (CVPR), pages 1972–1979.
IEEE.
Manning, C. D. and Sch
¨
utze, H. (1999). Foundations of
statistical natural language processing, volume 999.
MIT Press.
Miller, G. A. and Others (1995). WordNet: a lexical
database for English. Communications of the ACM,
38(11):39–41.
Modolo, D., Vezhnevets, A., and Ferrari, V. (2015). Con-
text forest for object class detection. In Proc. British
Machine Vision Conference (BMVC).
Oliva, A. and Torralba, A. (2006). Building the gist of a
scene: The role of global image features in recogni-
tion. Progress in brain research, 155:23.
Palmer, S. E. (1999). Vision science: Photons to phe-
nomenology. MIT press Cambridge, MA.
Patterson, G., Xu, C., Su, H., and Hays, J. (2014). The sun
attribute database: Beyond categories for deeper scene
understanding. International Journal of Computer Vi-
sion, 108(1-2):59–81.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in Neural Informa-
tion Processing Systems, pages 91–99.
Rohrbach, M., Stark, M., and Schiele, B. (2011). Evaluating
knowledge transfer and zero-shot learning in a large-
scale setting. In Proc. IEEE Conf. on Computer Vision
and Pattern Recognition (CVPR), pages 1641–1648.
IEEE.
Rohrbach, M., Wei, Q., Titov, I., Thater, S., Pinkal, M.,
and Schiele, B. (2013). Translating video content to
natural language descriptions. In IEEE International
Conference on Computer Vision.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Tighe, J. and Lazebnik, S. (2010). Superparsing: scal-
able nonparametric image parsing with superpixels. In
European conference on computer vision, pages 352–
365. Springer.
Vezhnevets, A. and Ferrari, V. (2015). Object localization in
imagenet by looking out of the window. arXiv preprint
arXiv:1501.01181.
Wu, Q., Shen, C., Hengel, A. v. d., Wang, P., and Dick,
A. (2016). Image captioning and visual question an-
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
128

swering based on attributes and their related external
knowledge. arXiv preprint arXiv:1603.02814.
Xiao, J., Ehinger, K. A., Hays, J., Torralba, A., and Oliva,
A. (2014). SUN Database: Exploring a Large Col-
lection of Scene Categories. International Journal of
Computer Vision (IJCV), pages 1–20.
Xiao, J., Hays, J., Ehinger, K. A., Oliva, A., and Torralba,
A. (2010). Sun database: Large-scale scene recogni-
tion from abbey to zoo. In Proc. IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR), pages
3485–3492. IEEE.
Zhu, Y., Zhang, C., R
´
e, C., and Fei-Fei, L. (2015). Build-
ing a large-scale multimodal knowledge base sys-
tem for answering visual queries. arXiv preprint
arXiv:1507.05670.
Zero-shot Object Prediction using Semantic Scene Knowledge
129
