
On the Security of Safety-critical Embedded Systems:
Who Watches the Watchers? Who Reprograms the Watchers?
Carlos Moreno and Sebastian Fischmeister
Department of Electrical and Computer Engineering, University of Waterloo, Waterloo, Ontario, Canada
{cmoreno, sfischme}@uwaterloo.ca
Keywords:
Embedded Systems Security, Physical Unclonable Functions, Safety-critical Systems, Runtime Monitoring.
Abstract:
The increased level of connectivity makes security an essential aspect to ensure that safety-critical embedded
systems deliver the level of safety for which they were designed. However, embedded systems designers
face unique technological and economics challenges when incorporating security into their products. In this
paper, we focus on two of these challenges unique to embedded systems, and propose novel approaches to
address them. We first deal with the difficulties in successfully implementing runtime monitoring to ensure
correctness in the presence of security threats. We highlight the necessity to implement runtime monitors as
physically isolated subsystems, preferably with no (direct) connectivity, and we propose the use of program
tracing through power consumption to this end. A second critical aspect is that of remote firmware upgrades:
this is an essential mechanism to ensure the continuing security of a system, yet the mechanism itself can
introduce severe security vulnerabilities. We propose a novel approach to ensure secure remote upgrades
and sketch the details of an eventual implementation. It is our goal and hope that the computer security and
embedded systems communities will discuss and evaluate the ideas that we present in this paper, to assess
their effectiveness and applicability in practice.
1 INTRODUCTION
Security is an essential component in safety-critical
embedded systems to ensure the required level of
safety given the ever-increasing level of connectiv-
ity of these systems. The Internet of Things (IoT)
and the prospect of connected vehicles makes the em-
bedded devices an equally or more attractive target
for cybercriminals, compared to the world of PCs.
Research studies such as the Jeep Cherokee hack by
Miller and Valasek (Miller and Valasek, 2015; Miller
and Valasek, 2016), the pacemaker hack by Barn-
aby Jack (Computerworld Magazine, 2012), and real-
world incidents such as Stuxnet in the nuclear do-
main (Langner, 2011) demonstrate the realistic na-
ture of this threat. The increasing complexity and
more sophisticated functionality of modern systems
(including vehicles, medical devices, industrial con-
trol systems, etc.) only makes the task of adding se-
curity more challenging.
Correctness and reliability are also essential in
safety-critical systems (Avizienis et al., 2004). These
systems in general require runtime monitoring sub-
systems to enforce these aspects during the devices’
operation phase (Pnueli and Zacks, 2006; Havelund,
2008; Navabpour et al., 2013). Indeed, regulatory
standards mandate runtime monitoring at least for
high criticality systems such as aerospace (RTCA /
EUROCAE, 2012) and nuclear facilities (IEC, 2006);
in the automotive field, ISO-26262 lists runtime mon-
itoring as “highly recommended”for compliance with
high safety integrity levels (ISO, 2011).
Adapting these ideas to the embedded systems se-
curity context poses unique and important difficulties:
any efforts to ensure correctness and reliability, in-
cluding fault-tolerance and redundancy mechanisms
as well as runtime monitoring are in vain if a mali-
cious attacker has the ability to reprogram the system
or some key subsystems. Moreover, any monitoring
specifically targeting security (i.e., the integrity of the
system as it operates) is also susceptible to the threat
of reprogramming the firmware of the device if it runs
in the same hardware as the system being monitored.
This was effectively demonstrated by the Jeep Chero-
kee hack (Miller and Valasek, 2015).
Problem Statement
Two key challenges are closely related to the above
aspect, and constitute the motivating problem state-
ment for this work:
Moreno, C. and Fischmeister, S.
On the Security of Safety-critical Embedded Systems: Who Watches the Watchers? Who Reprograms the Watchers?.
DOI: 10.5220/0006228304930498
In Proceedings of the 3rd International Conference on Information Systems Security and Pr ivacy (ICISSP 2017), pages 493-498
ISBN: 978-989-758-209-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
493

• How do we effectively monitor the integrity of
the operation of an embedded device? In par-
ticular, how do we incorporate runtime monitor-
ing techniques that are virtually immune to the
threat of remote attackers, including reprogram-
ming firmware?
• How do we securely perform remote firmware
upgrades? One key aspect is that ensuring secu-
rity during the operation of a system requires hav-
ing the ability to (remotely) reprogram it, so that
security vulnerabilities can be corrected promptly
after being discovered; thus, it is necessary to en-
sure that such mechanism cannot be abused by
attackers to reprogram devices with malware of
their choice.
Our Contributions
This paper addresses the two challenges highlighted
above, and proposes novel and practical approaches
to solve these problems. For the runtime monitoring
aspect, we highlight the necessity of designing the se-
curity runtime monitor as a physicallyisolated device;
to this end, we survey techniques where power con-
sumption is used for anomaly detection or program
trace reconstruction and argue in favor of mechanisms
based on this promising approach.
We also propose a novel mechanism for se-
cure firmware upgrade based on Physical Unclonable
Functions (PUF), and present a sketch of a potential
implementation; the novelty in our scheme is centered
around the use of a single-challenge PUF to gener-
ate an encryption key that only the legitimate user has
access to. Given the high level of resilience against
physical attacks that PUFs exhibit, we believe that
our proposed mechanism has the potential to provide
a substantially high level of security.
Organization of the Paper
The remaining of this paper is organized as follows:
Section 2 provides background on PUFs. Section 3
presents our proposed techniques, including power-
based runtime monitoring in Section 3.1 and our pro-
posed mechanism for secure firmware upgrade in Sec-
tion 3.2. Section 4 includes a brief discussion and fu-
ture work, followed by some concluding remarks in
Section 5.
2 BACKGROUND – PHYSICAL
UNCLONABLE FUNCTIONS
Physical Unclonable Functions (PUFs) are a rel-
atively new and promising primitive where func-
tions physically unique to each device can be pro-
duced (Herder et al., 2014). This has interesting ap-
plications as mechanisms for devices to authenticate
themselves or for generation of encryption keys.
The main benefit of PUFs is their increased re-
silience to reverse-engineering compared to tamper
prevention or tamper-resistance techniques used to
protect some embedded secret information such as
cryptographic keys. This derives from the fact that
the uniqueness of this generated information comes
from the unique variations in the manufacturing pro-
cess at the microscopic level. Techniques typically
rely on intentional race conditions in the hardware
where the factor that resolves these race conditions
is the unique microscopic characteristics of each de-
vice given by random variations in the manufactur-
ing process beyond anyone’s control. These micro-
scopic characteristics are virtually impossible to mea-
sure and clone, even with the most sophisticated and
expensive equipment and state-of-the-art techniques.
PUFs are classified into two main types: single-
challenge and multiple-challenge. A single-challenge
PUF can be seen as a constant function—the hard-
ware produces a fixed output, with the important char-
acteristic that this fixed value is unique to each device.
Single-challengePUFs are suitable to produce crypto-
graphic keys. Multiple-challenge PUFs in general in-
volve hardware that interacts with external input sig-
nals, and are useful for device authentication. This
work relies on single-challenge PUFs, so we omit any
additional details on multiple-challenge PUFs; the in-
terested reader can find more details in (Herder et al.,
2014).
PUFs are in general combined with some form of
error correction code, to ensure that the output from
the PUF is consistent across accesses (Herder et al.,
2014); this is necessary to compensate for the fact that
the race conditions in some cases may be resolved by
the noise, producing outputs that vary across multi-
ple accesses. This is especially important for single-
challenge PUFs with outputs used as a cryptographic
key.
3 OUR PROPOSED TECHNIQUES
This section presents our proposed techniques, along
with our arguments to support the ideas and sketches
of possible implementation details.
3.1 Runtime Monitoring Through
Power Consumption
We propose the idea that, in addition to the stan-
dard runtime monitoring techniques implemented in
ICISSP 2017 - 3rd International Conference on Information Systems Security and Privacy
494
safety-critical systems to ensure correctness and re-
liability, these systems should include runtime mon-
itors to enforce security properties, including the in-
tegrity of the software being executed. Ensuring in-
tegrity of the execution is essential, as several studies
have demonstrated the ability of an attacker to repro-
gram the firmware of a device, bypassing any run-
time monitoring subsystems that are running in the
same processor as the standard functionality (Miller
and Valasek, 2015; Computerworld Magazine, 2012).
Running the runtime monitors in the same pro-
cessor as the standard functionality introduces im-
portant challenges in terms of risk of breaking extra-
functional requirementssuch as timing or resource us-
age as well as ensuring isolation between the moni-
tor and the standard functionality. Moreover, “system
crashes” due to corruption in the execution environ-
ment (e.g., stack or memory corruption) can disrupt
or entirely disable the runtime monitor. This con-
stitutes an important advantage for runtime monitors
that are physically isolated from the processor being
monitored. This aspect is even more critical when we
consider security, given the threat to the integrity of
the software being executed.
On the other hand, running in the same processor
alongside the software being monitored has the ad-
vantage that more information is available to the run-
time monitor, increasing its potential effectiveness.
Thus, we posit the approach of using two runtime
monitors: one that runs in the same processor as the
software being monitored to enforce correctness and
reliability; and one that runs as an isolated device
to ensure security— possibly in addition to enforcing
properties related to correctness and reliability. We
observe that a system crash, regardless of whether it
is related to a security attack, is detected by the exter-
nal monitor.
It is also important in a practical implementation
to ensure that the external monitor system is phys-
ically isolated from the Internet or in general from
any form of remote connectivity. At the very least,
a carefully designed air gap mechanism should be in-
cluded, ensuring that the monitor lacks any capabil-
ities of wireless connectivity and any firewall func-
tionality implemented in FPGA or otherwise repro-
grammable firmware.
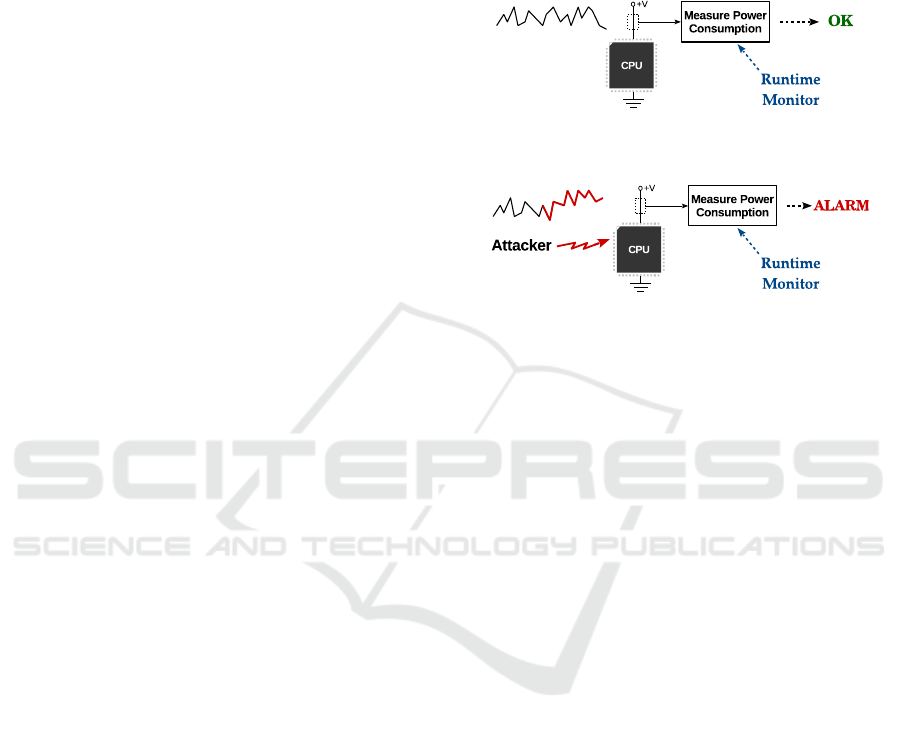
We propose the use monitoring through power
consumption, since this is a technique with a remark-
able potential for effectiveness. Given the strict phys-
ical relationship between execution and power con-
sumption, an attacker would have to “bend the Laws
of Physics” to be able to inject malware that exhibits
the same power consumption profile as the original
software in the device. At the very least, the attacker
would be limited to executing software that produces
a power consumption profile “close enough” to the
original (which they may or may not know, depending
on the specific system), and yet do something useful
for the attacker. Figure 1 illustrates this approach.
(a) Authentic Execution
(b) Attacker Injects Malware
Figure 1: Runtime Monitoring Through Power Consump-
tion.
Two different approaches have recently appeared
in the literature: the monitor system can reconstruct
the execution trace and then analyze the program’s ex-
ecution directly, or it can analyze characteristics of the
power trace and detect deviations from normal pat-
terns. This is illustrated in Figure 2.
The former approach has been demonstrated in
(Moreno and Fischmeister, 2016; Liu et al., 2016;
Moreno et al., 2013; Msgna et al., 2013). These
techniques can be combined with the work presented
in (Moreno et al., 2016), where a compiler optimiza-
tion stage is used to reorder instructions in the gen-
erated binary code to maximize distinguishability be-
tween the power traces for different sections of the
program, potentially increasing the effectiveness of
the program trace reconstruction.
Clark et al. (Clark et al., 2013) presented an ap-
proach based on applying pattern classification tech-
niques to the power trace as a whole. This tech-
nique can be useful for devices with simple and highly
repetitive tasks (as those presented in that work), and
it may also be suitable for analysis of a power trace
containing power consumption of multiple devices,
where it may be easier than attempting to disaggre-
gate the data in the power trace. Though the work by
Clark et al. uses a statistical pattern recognition ap-
proach, this technique may be combined with neural
networks or any other machine learning techniques,
even if, to the best of our knowledge, none of these
have been attempted by the research community.
On the Security of Safety-critical Embedded Systems: Who Watches the Watchers? Who Reprograms the Watchers?
495
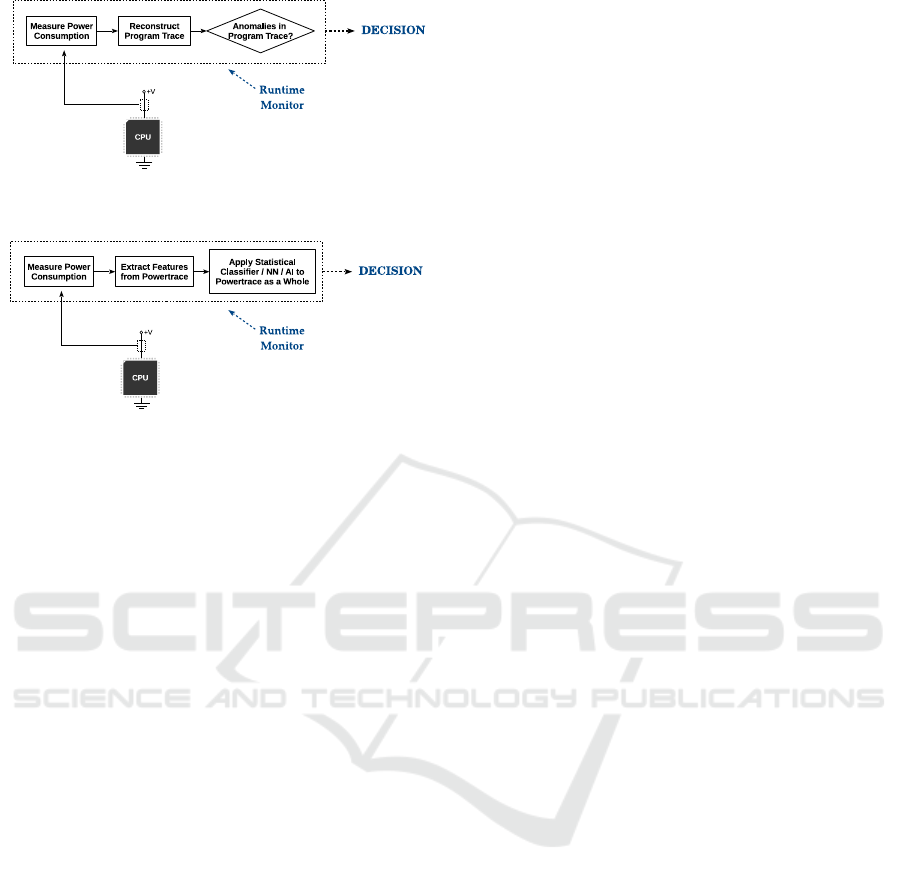
(a) Reconstruct Execution Trace and Analyze
(b) Apply Classification Techniques to the Power Trace
Figure 2: Runtime Monitoring – Processing Approaches.
3.2 Secure Remote Firmware Upgrades
Though the standard practice of software upgrades
with security fixes to patch vulnerabilities as they are
found has been criticized, no convincing and prac-
tical alternatives have been proposed. The evidence
pointing to the need of this practice at the very least
as a “safety net” is compelling: examples such as
Heartbleed (OpenSSL Team, 2014), Bash Shellshock
(NIST, 2014), and POODLE (M¨oller et al., 2014)
highlight the importance of upgrade mechanisms; the
use of recognized tools that are assumed to be secure
could have unexpected critical security flaws, poten-
tially introducing severe vulnerabilities in our system.
Indeed, (McAfee, 2015) describes this practice as es-
sential to ensure security in automotive systems while
reducing the cost of recalls. (SAE, 2016) mentions
this aspect as a recovery mechanism that still requires
more research to be securely applied and accepted by
customers.
However, this practice is especially difficult given
the unsupervised nature of embedded systems, mak-
ing it hard to prevent abuse of this mechanism for the
purpose of reprogramming the firmware with the at-
tackers’ malware. (McAfee, 2015) mentions “appro-
priate user controls and safety precautions”, but it pro-
vides no concrete examples of any efficient and effec-
tive methods to accomplish it.
In low-criticality systems, where the required se-
curity level is moderate, the designer can embed a
public-key in the device so that firmware upgrades
can be digitally signed. The device verifies the sig-
nature and only applies the upgrade if the verifica-
tion passes. However, this requires tamper-resistance
mechanisms to protect the integrity of the embedded
public-key, which may not provide a high enough se-
curity level for use in safety-critical systems.
We propose a secure remote firmware upgrade
mechanism based on an alternative form of using
single-challenge PUFs. We describe the operation
of this mechanism and provide a sketch of possible
implementation details. Our goal and hope is that the
communities of computer security and embedded sys-
tems (including industry) will discuss, evaluate and
critique our proposed technique, eventually leading to
practical implementations.
The approach is based on using the output of a
single-challenge PUF as the cryptographic key that
will be used to encrypt the binary with the new
firmware that the device receives. However, using en-
cryption keys generated by PUFs leads us to a tricky
situation: if the device never outputs this key, then
it is only useful to encrypt data at rest (i.e., data en-
crypted by the device that only the device itself will
read and decrypt at a later time). If we want to use
this PUF to generate a key to communicate with the
device in a way that the device can rely on the au-
thenticity of the source, then the situation gets more
complicated: the (legitimate) user has to possess this
key so that they can encrypt the data transmitted to
the device. Thus, a mechanism for the user to request
the key from the device is necessary. This introduces
a problem: if the user can request the device to output
the key, then an attacker can also request and obtain
the key. We observe that encrypting that very trans-
mission (the device transmitting the key) or attempt-
ing to authenticate ourselves to the device, so that it
only outputs the key to the legitimate user, are not ef-
fective approaches: to be able to accomplish that, we
need an additional shared secret with the device; that
is, we need another secret key embedded in the de-
vice. However, the premise is that PUFs provide a
superior mechanism to hide secrets in a device, so an
additional auxiliary secret would simply introduce a
weaker link, making the use of the PUF pointless.
With ECC (or in general with public-key cryptog-
raphy), we could get around this limitation, but only
in one direction and would not solve the above prob-
lem: the device could use the output of the PUF as
the private key, and generate the corresponding pub-
lic key (examples and details can be found in (Han-
kerson et al., 2004)), which can be disclosed with-
out any restrictions. The problem then is that any-
one can use this public key to encrypt transmissions
to the device, and the device has no way to authenti-
cate the sender of those transmissions (again, unless
ICISSP 2017 - 3rd International Conference on Information Systems Security and Privacy
496
some other shared secret is available, which as men-
tioned is not a valid option).
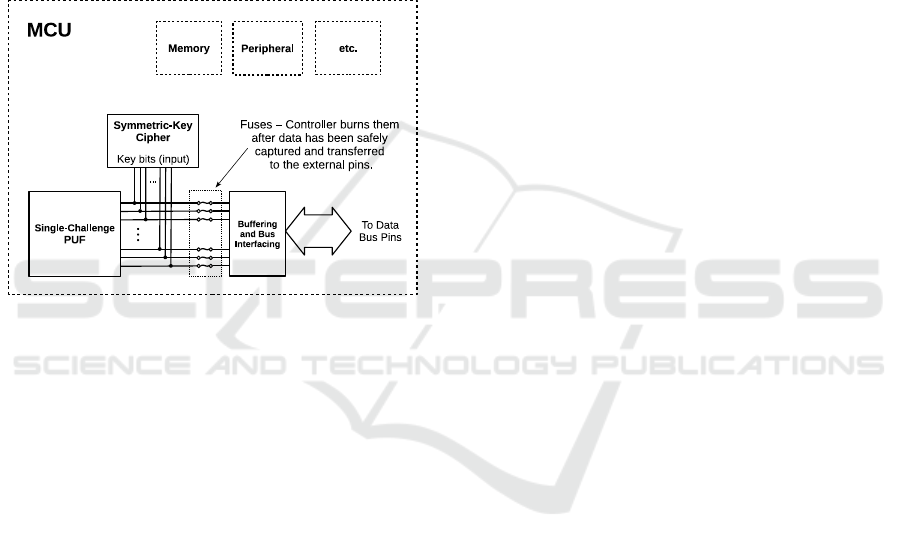
The key observation is that the legitimate user of
the devices has one important advantage: it can be the
first party to ever request the device to disclose the
key (the output of the PUF). In our proposed mecha-
nism, the device incorporates a protocol for one-time
disclosure of this key, with this disclosure being un-
conditionally followed by a step that physically severs
the path from the PUF to device bus or external pins.
Thus, we can safely use this key to communicate with
the device, since it is virtually guaranteed that no-one
else will be able to obtain the key. Figure 3 illustrates
this idea.
Figure 3: Mechanism for One-Time Disclosure of Encryp-
tion Key.
We notice that an insecure alternatively would be
for the device to include an externally issued com-
mand that severs the path between the PUF and the
outside of the device. This certainly provides more
flexibility, but it introduces two risks: (1) the user
could fail to issue the command to sever the path
from the PUF to the outside, leaving the key acces-
sible without any restriction; and much more severe,
(2) a malicious manufacturer of the chips with this
functionality (or a manufacturer with its infrastruc-
ture compromised) or a malicious entity in the supply
chain could steal and keep the keys before shipping
the chips to the legitimate user. We need the device-
enforced aspect of self-destruction upon first access,
so that if someone steals the key, the legitimate user
will detect it and they will simply discard the device.
The particular scenario of interest to us is that
where the output of a PUF is used as the encryp-
tion key for a firmware upgrade. The vendor of the
devices in this case extracts the key for each device
before shipping them and securely stores them in a
database. These keys can be later used to encrypt
the transmitted binaries with the new firmware. This
mechanism prevents anyone other than the manufac-
turer from replacing the firmware of those devices.
The guarantee is quite strong on the side of the device,
since it has the same advantages as PUFs in general.
If the mechanism to physically sever the path from the
PUF to the outside world is properly implemented,
then we can have a strong assurance that no-one else
will be able to extract the key from the device. One
point of failure does remain, of course: the keys are
stored in a database under the manufacturer’s control,
which may be subject to attacks. However, with the
legitimate operator of the system being in physical
possession of that database, strong layers of security
can (and must, of course) be added.
Multiple instances of this mechanism (i.e., multi-
ple PUFs with one-time output disclosure) could be
included for various purposes; for example, an addi-
tional encryption key could be used for regular com-
munications where the device needs to authenticate
incoming transmissions. Though the same key gen-
erated by the one PUF in the device could be used
for multiple purposes, using separate keys for differ-
ent purposes provides an increased level of security,
so we suggest that at least the key used for encrypting
the binaries in firmware upgrades should be separate
from any keys for other purposes.
4 DISCUSSION AND FUTURE
WORK
Some important challenges need to be solved for
our proposals to be feasible approaches in practice.
Though we plan to tackle some of these issues, we
hope that the communities of computer security and
embedded systems will also take on these challenges.
For the power-based runtime monitoring, the as-
pect of an adequate action by the system upon de-
tection of anomalous behavior is crucial. We believe
that this is rather an engineering aspect, and it is spe-
cific to the particular system and application domain
where the technique is used. Aspects such as real-
time operation given reasonable amount of comput-
ing power and minimization of training database size
are also important. Information from additional chan-
nels could further improve performance by providing
clues about the current operation of the program. An
example of this is the use of timing of communica-
tions in the CAN bus (Cho and Shin, 2016).
Our proposed remote firmware upgrade mecha-
nism also has important engineering aspects that need
to be solved, such as storage and management of the
devices’ keys, and protocols for the actual upgrades,
which require generation of unique encrypted binaries
for each device. On the research side, the communi-
On the Security of Safety-critical Embedded Systems: Who Watches the Watchers? Who Reprograms the Watchers?
497

ties still need to investigate the feasibility and effec-
tiveness of the method, eventually leading to practi-
cal implementations. Regarding the use of one-time-
disclosed PUF-generated cryptographic keys for mul-
tiple applications, we emphasize our recommendation
of the use of separate keys for different purposes, or
at the very least, one separate encryption key for the
purpose of firmware upgrades.
5 CONCLUSIONS
In this paper, we have proposed and discussed tech-
niques for runtime monitoring of security properties
in safety-critical embedded systems and for secure re-
mote firmware upgrades. These techniques are aimed
at solving two related problems that become critical
as the level of connectivity of these systems increases.
Some important challenges remain to be solved be-
fore these techniques can be effectively applied in
practical systems, and it is our hope that the com-
munities of computer security and embedded systems
will evaluate and discuss these techniques, eventually
leading to practical implementations.
ACKNOWLEDGEMENTS
This research was supported in part by the Natu-
ral Sciences and Engineering Research Council of
Canada and the Ontario Research Fund.
REFERENCES
Avizienis et al. (2004). Basic Concepts and Taxonomy of
Dependable and Secure Computing. IEEE Transac-
tions on Dependable and Secure Computing, 1(1):11–
33.
Cho, K.-T. and Shin, K. G. (2016). Fingerprinting Elec-
tronic Control Units for Vehicle Intrusion Detection.
USENIX Security Symposium.
Clark et al. (2013). WattsUpDoc: Power Side Channels
to Nonintrusively Discover Untargeted Malware on
Embedded Medical Devices. USENIX Workshop on
Health Information Technologies.
Computerworld Magazine (2012). Pacemaker Hack Can
Deliver Deadly 830-Volt Jolt.
Hankerson, D., Menezes, A., and Vanstone, S. (2004).
Guide to Elliptic Curve Cryptography. Springer-
Verlag.
Havelund, K. (2008). Runtime Verification of C Programs.
In International Conference on Testing of Software
and Communicating Systems.
Herder, C., Yu, M.-D., Koushanfar, F., and Devadas, S.
(2014). Physical Unclonable Functions and Applica-
tions: A Tutorial. Proceedings of the IEEE, 102(8).
International Electrotechnical Commission (2006). Nuclear
Power Plants – Instrumentation and Control Systems
Important to Safety – Software Aspects for Computer-
Based Systems Performing Category A Functions
(IEC-60880).
International Office for Standardization (2011). Interna-
tional Standard ISO-26262 – Road Vehicles Func-
tional Safety.
Langner, R. (2011). Stuxnet: Dissecting a Cyberwarfare
Weapon. IEEE Security & Privacy.
Liu et al. (2016). On Code Execution Tracking via Power
Side-Channel. In ACM Conference on Computer and
Communications Security. ACM.
McAfee (2015). Automotive security best practices.
Miller, C. and Valasek, C. (2015). Remote Exploitation of
an Unaltered Passenger Vehicle.
Miller, C. and Valasek, C. (2016). Advanced CAN Injection
Techniques for Vehicle Networks.
M¨oller, B., Duong, T., and Kotowicz, K. (2014). This POO-
DLE Bites: Exploiting The SSL 3.0 Fallback – Secu-
rity Advisory.
Moreno, C. and Fischmeister, S. (2016). Non-intrusive
Runtime Monitoring Through Power Consumption: A
Signals and SystemAnalysis Approach to Reconstruct
the Trace. International Conference on Runtime Veri-
fication (RV’16).
Moreno, C., Fischmeister, S., and Hasan, M. A. (2013).
Non-intrusive Program Tracing and Debugging of
Deployed Embedded Systems Through Side-Channel
Analysis. Conference on Languages, Compilers and
Tools for Embedded Systems.
Moreno, C., Kauffman, S., and Fischmeister, S. (2016).
Efficient Program Tracing and Monitoring Through
Power Consumption – With A Little Help From The
Compiler. In Design, Automation, and Test in Europe
(DATE).
Msgna, M., Markantonakis, K., and Mayes, K. (2013). The
B-side of side channel leakage: control flow security
in embedded systems. In International Conference
on Security and Privacy in Communication Systems,
pages 288–304. Springer.
Navabpour et al. (2013). RiTHM: A Tool for Enabling
Time-triggered Runtime Verification for C Programs.
In Foundations of Software Engineering. ACM.
National Institute for Standards in Technology (2014).
BASH Shellshock – CVE-2014-6271 (Exported func-
tion through environment variable).
OpenSSL Team (2014). OpenSSL Heartbeat Read Overrun
– CVE-2014-0160.
Pnueli, A. and Zacks, A. (2006). PSL Model Checking and
Run-Time Verification via Testers. International Sym-
posium on Formal Methods.
RTCA / EUROCAE (2012). DO-178C: Software Consider-
ations in Airborne Systems and Equipment Certifica-
tion.
SAE International (2016). Cybersecurity Guidebook for
Cyber-Physical Vehicle Systems.
ICISSP 2017 - 3rd International Conference on Information Systems Security and Privacy
498
