Anatomical Landmark Tracking by One-shot Learned Priors for
Augmented Active Appearance Models
Oliver Mothes and Joachim Denzler
Computer Vision Group, Friedrich Schiller University Jena, Jena, Germany
{oliver.mothes, joachim.denzler}@uni-jena.de
Keywords:
Landmark Tracking, Active Appearance Models, Whitened Histograms of Orientations.
Abstract:
For animal bipedal locomotion analysis, an immense amount of recorded image data has to be evaluated by
biological experts. During this time-consuming evaluation single anatomical landmarks have to be annotated
in each image. In this paper we reduce this effort by automating the annotation with a minimum level of
user interaction. Recent approaches, based on Active Appearance Models, are improved by priors based on
anatomical knowledge and an online tracking method, requiring only a single labeled frame. However, the
limited search space of the online tracker can lead to a template drift in case of severe self-occlusions. In
contrast, we propose a one-shot learned tracking-by-detection prior which overcomes the shortcomings of
template drifts without increasing the number of training data. We evaluate our approach based on a variety of
real-world X-ray locomotion datasets and show that our method outperforms recent state-of-the-art concepts
for the task at hand.
1 INTRODUCTION
The profound investigation of animal locomotion
plays an important role in many fields of research,
e.g., zoology, biomechanics, and robotics. For those
analyses an immense amount of data has to be
recorded to be able to derive a model or to refine ex-
isting ones. In this context, it is necessary to evalu-
ate the collected data in detail, which requires con-
siderable expenses by biological experts in terms of
manually annotating every single measure (Nyakatura
et al., 2011; Andrada et al., 2013). Therefore, an
automation of this task is highly preferable. In or-
der to analyze the locomotor system in vivo, high-
speed X-ray acquisition is applied. In an usual ex-
perimental setup, animals are placed on a treadmill
which is enclosed by a C-arm X-ray acquisition sys-
tem with two perpendicular detectors providing a top
view (dorsoventral view) as well as a side view (lat-
eral view) image of the entire locomotor system. To
allow for a detailed biological evaluation, acquisition
is performed at a high spatial and temporal resolution
(1536 × 1024 pixels at 1000 FPS) on average for 1-2
seconds, resulting in up to 2000 frames. In order to
avoid the time-consuming task of manual annotation
of single images (Haase et al., 2013), an automation
of this task at a minimum level of user interaction is
of great interest.
bone
example
Anatomical
Knowledge
Training Data
ω
LDA
Full AAM
AUGMENTED AAM
Subset AAM
Local
Tracking
extraction
learn
model
One-shot
Detector
train
train
Lower Leg
Contraints
Eipolar Constraints
Distance Constraints
Torso
Constraints
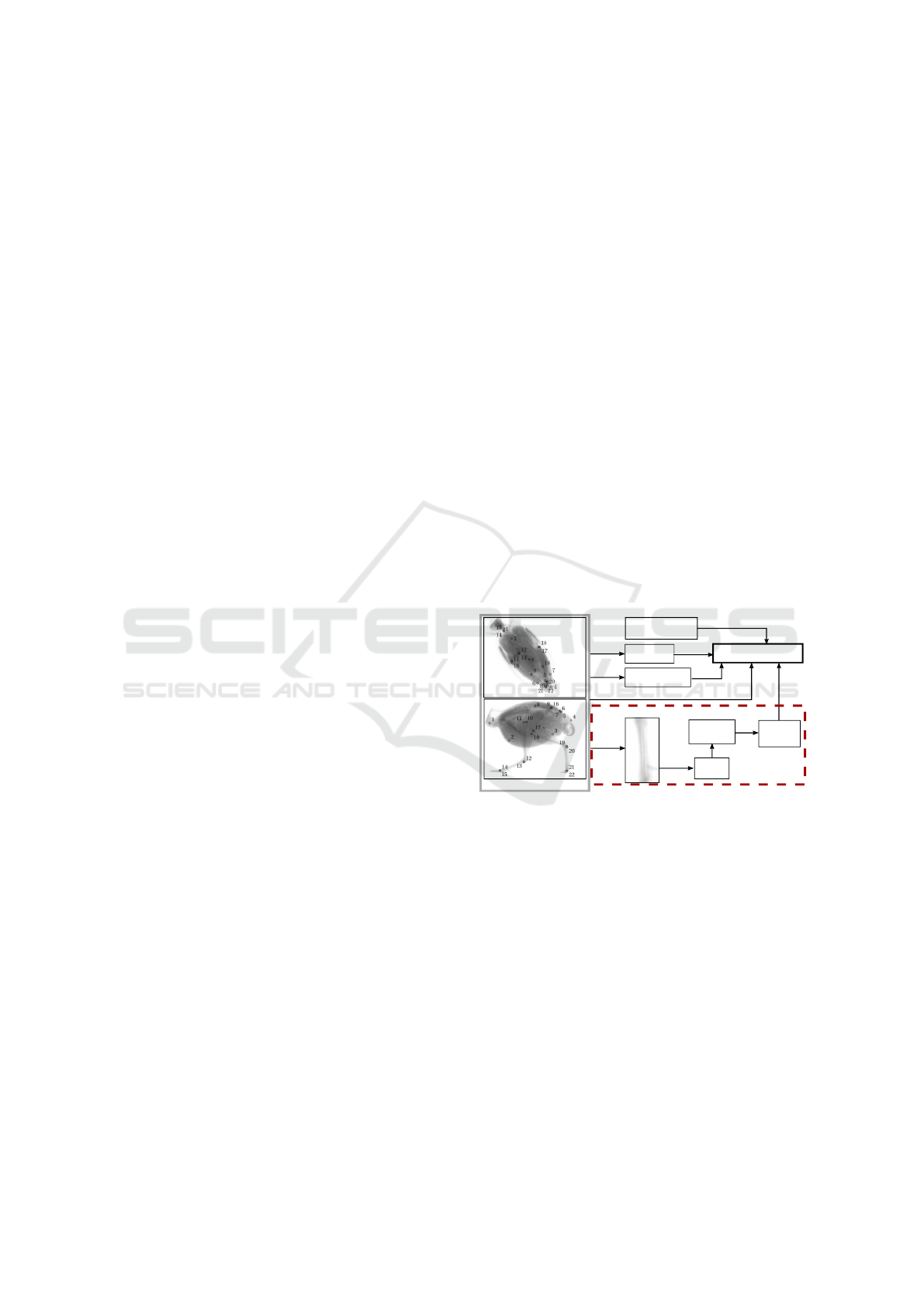
Figure 1: Based on few annotated biplanar recorded training
images an Augmented AAM (Haase and Denzler, 2013) is
trained, consisting of anatomical knowledge, a full multi-
view AAM model, an AAM model of the torso land-
mark subset, epipolar constraints and a local tracking-by-
detection prior introduced in this paper.
In (Haase and Denzler, 2013) Active Appearance
Models (AAM) (Cootes et al., 2001) have been ap-
plied to several bipedal bird locomotion datasets. One
crucial conclusion of this work is that AAMs need
substantial constraints from various sources. With the
support of additional anatomical knowledge, i.e. re-
gion segmentation, multi-view acquisition, and local
landmark tracking, for the animals lower limb sys-
tem, the resulting Augmented AAM (Haase and Den-
zler, 2013) provides robust results for the majority of
the processed datasets. However, the applied online
tracking approach (Amthor et al., 2012) suffers from
246
Mothes O. and Denzler J.
Anatomical Landmark Tracking by One-shot Learned Priors for Augmented Active Appearance Models.
DOI: 10.5220/0006133302460254
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 246-254
ISBN: 978-989-758-227-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

a potential template drift caused by severe and even
full occlusion of the tracked objects.
Motivated by this shortcoming, we propose a one-
shot learned tracking-by-detection approach which
can handle these limitations by a global search. With
one representative example of an annotated landmark
subset a detector is learned. A two-staged graph-
based tracking approach then provides motion trajec-
tories through the whole sequence. Those trajectories
are utilized as a prior in the Augmented Active Ap-
pearance Model framework together with priors from
other sources as illustrated in Figure 1. In our experi-
ments we show that this extension is able to improve
previous results by up to 120 pixels in precision.
The remainder of the paper is structured as follows.
In Section 2 we will give a brief overview of re-
lated work, followed by a short introduction to Ac-
tive Appearance Models and its augmentation in Sec-
tion 3. Afterwards, our one-shot learned tracking-by-
detection approach will be introduced in Section 4.
An evaluation of the detection and tracking results is
presented in Section 5. Finally, Section 6 concludes
the paper with a short discussion.
2 RELATED WORK AND
MOTIVATION
For anatomical landmark tracking Haase et al. (Haase
and Denzler, 2011) applied Active Appearance Mod-
els (Cootes et al., 2001) to X-ray locomotion scenar-
ios. They showed that this generative model is well
suited for the task at hand since training requires only
a small amount of low contrast images. However,
this approach has its weaknesses for a certain sub-
set of landmarks–primarily landmarks of the lower
limb system–undergo severe occlusions. They ex-
tended their approach in (Haase et al., 2011) to multi-
view AAMs (Lelieveldt et al., 2003), which is more
robust and accurate for torso landmark subsets com-
pared to the single view approach. By concatenat-
ing corresponding landmarks of the second view the
model became more general. The usage of additional
constraints, especially for the distal limb landmarks,
supporting the multi-view AAM, leads to a holistic
model, referred to as Augmented AAM (Haase and
Denzler, 2013). Anatomical knowledge, the multi-
view information formulated as epipolar geometry,
and a local tracking approach were used as priors for
augmenting the standard AAM. Subtemplate Match-
ing (STM) (Amthor et al., 2012) as a data-driven on-
line tracking approach localizes landmarks of the dis-
tal limb segments. Based on the small number of
available training images, STM only needs one ini-
tial labeled frame for robust tracking, which renders
the method highly preferable for the underlying task.
However, online tracking fails in the case of severe
occlusions and temporal disappearance of tracked ob-
jects. For example, subsequences with long-term oc-
clusions of similar crossing objects considerably af-
fects the tracking performance. As a consequence the
template drift occurs, which results in a total loss of
the structure to be tracked. Sequences with tempo-
ral disappearance of the object of interest produces
a similar effect. An extension of STM is a picto-
rial structure approach (Amthor et al., 2014), where
the distal limb system is formulated by a kinematic
chain of single bones. Unfortunately, the extended
method has the same weaknesses as STM. In con-
trast, our one-shot learned tracking-by-detection ap-
proach will tackle the template drift problem and han-
dles strong texture shifts using a robust offline graph-
based tracker even when the patch detection is missed
in single frames.
Offline tracking algorithms are used to track objects in
sequences (Andriluka et al., 2010; Li et al., 2015) and
they are often formulated as a graph theoretical prob-
lem (Zhang et al., 2008; Berclaz et al., 2011; Jiang
et al., 2013; Dehghan et al., 2015). First and fore-
most, reliable object detections serve as basis for all
tracking approaches. Detection approaches are based
on local image features like HOG (Dalal and Triggs,
2005; Felzenszwalb et al., 2010) or SIFT (Lowe,
2004) to detect objects in every single frame. In or-
der to localize an object of interest a Support Vector
Machine (SVM) is used for classifying positive and
negative image patches in a sliding window manner
(Felzenszwalb et al., 2010). However, SVM training
is computationally expensive–especially when apply-
ing hard negative mining–and need a huge amount of
training data.
Based on the fact that the amount of training data in
our application scenario is limited, we use Whitened
HOG features and an LDA model (Hariharan et al.,
2012) for detecting landmark subsets, which only
needs one single positive example for robust detector
training.
More recently, Coarse-to-fine Convolutional Network
Cascades (Sun et al., 2013; Zhou et al., 2013) are
designed in a multi-level architecture for facial land-
mark detection. By fusing the outputs of each level of
the multiple networks a robust and accurate estima-
tion is possible. However, the Convolutional Neural
Network frameworks have a complex structure and
need a lot of data for training which is contrary to
our pre-condition of a very limited number of train-
ing data.
Anatomical Landmark Tracking by One-shot Learned Priors for Augmented Active Appearance Models
247

The main contribution of this paper is a one-shot
learned tracking-by-detection approach using a linear
detector utilizing Histogram of Oriented Gradients
(HOG) features and a classifier based on the Linear
Discriminant Analysis in a sliding-window manner to
detect the landmark subset of the lower limb system.
The detection method provides two important advan-
tages. On the one hand, many detector models for a
sequence can be trained in a very short time and on the
other hand the model training requires only one repre-
sentative positive example which is important for the
desired small annotation effort. Additionally, we use
smart convolutions to speed up sliding window man-
ner detections. Subsequently, a two-staged graph-
based tracking algorithm is used to determine land-
mark subset trajectories through the whole sequence.
In contrast to STM tracking, template drifts are re-
duced or even eliminated since landmark trajectories
are optimized globally. The single landmark tracks of
the lower limb system serve as important prior knowl-
edge for the fitting task of an probabilistic Augmented
AAM model, trained with only 10 annotated exam-
ples.
3 AUGMENTED ACTIVE
APPEARANCE MODELS
Augmented AAMs (AAAMs) proposed in (Haase and
Denzler, 2013) extend the fitting process of standard
AAMs by providing additional prior knowledge.
An AAM is a parametric statistical generative model
consisting of a shape component and a shape-free tex-
ture component. Training data consists of N images
with corresponding landmark annotations for relevant
anatomical structures. After aligning the N land-
mark shapes via Procrustes Analysis (Kendall, 1984),
shape variation is parameterized by applying Prin-
ciple Component Analysis PCA to the shape matrix
S
S
S = (s
s
s
1
− s
s
s, ..., s
s
s
N
− s
s
s) where s
s
s represents the mean
shape. The linear shape model s
s
s with shape parame-
ters b
b
b
s
and shape eigenvectors P
P
P
s
and the mean shape
s
s
s is given by:
s
s
s = s
s
s + P
P
P
s
b
b
b
s
. (1)
Afterwards, each image texture I
I
I
1
, ..., I
I
I
N
is warped
into the mean shape s
s
s. To obtain the linear texture
model g
g
g the very same PCA-based procedure is ap-
plied to the shape-normalized image vectors
g
g
g = g
g
g + P
P
P
g
b
b
b
g
, (2)
with the texture parameters b
b
b
g
, the texture eigenvec-
tors P
P
P
g
and the mean texture g
g
g. By concatenating the
variance-normalized shape and texture parameter vec-
tors and applying PCA again, we obtain the combined
parameters b
b
b
c
(Cootes et al., 1998).
After training, the AAM model can be used to find
a best fitting for the model parameter vector
ˆ
b
b
b
c
to
a given input image by minimizing the squared dis-
tance δg
g
g = (g
g
g
image
− g
g
g
model
) of the given image and
the model appearance:
ˆ
b
b
b
c
= argmin
b
b
b
c
δg
g
g
>
δg
g
g , (3)
where we make use of the linear relationship
δb
b
b
c
= A
A
Aδg
g
g . (4)
However, the accuracy of standard AAMs is prone to
occlusions and unseen cases due to the linear shape
and texture modeling. To overcome these limitations
prior knowledge from different sources can be incor-
porated. In addition to multi-view information (Haase
et al., 2011), the authors of (Haase and Denzler, 2013)
use various types of constraints to augment the stan-
dard AAM. Constraints like subset AAM, anatomi-
cal knowledge, epipolar geometry and a local track-
ing method (Amthor et al., 2012) for the animals
lower limb system are used to increase the fitting per-
formance and overcome the typical AAM weakness
based on linear shape and texture modeling. We im-
plement the idea of a combined approach by refor-
mulating the AAM fitting as a maximum a-posteriori
(MAP) framework as in (Haase and Denzler, 2013)
with a conditional independent input image I
I
I and ev-
ery provided fitting constraints π
π
π:
ˆ
b
b
b
c,MAP
= argmax
b
b
b
c
p(b
b
b
c
|I
I
I, π
π
π)
= argmax
b
b
b
c
p(I
I
I|b
b
b
c
) · p(π
π
π|b
b
b
c
) · p(b
b
b
c
) .
(5)
For input image data I
I
I it is sufficient to use only
a cropped version g
g
g
image
, defined by the AAM
shape configuration. The likelihood can than be
modeled as a Gaussian distribution g
g
g
image
|b
b
b
c
∼
N (g
g
g
model
, Σ
g
g
g
image
−g
g
g
model
) where Σ
g
g
g
image
−g
g
g
model
will be
estimated in AAM training. The prior term p(π
π
π|b
b
b
c
)
performs the integration of all the constraints π
π
π into
the AAM fitting process, where π
π
π represents the dif-
ferences between the given target constraint values
and the values based on the AAM parameters b
b
b
c
.
Again a Gaussian distribution π
π
π|b
b
b
c
∼ N (0, Σ
π
) will
be assumed. The term p(b
b
b
c
) can be modeled as max-
imum likelihood estimation using a uniform distribu-
tion. For more information about the prior modeling
of Augmented AAMs please refer (Haase and Den-
zler, 2013). A serious weakness of standard AAM
is tracking landmarks of the lower limbs of the ani-
mal locomotor system. To overcome this drawback,
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
248

a local tracking constraint π
π
π
local
with the results of
an online tracking approach (Amthor et al., 2012), lo-
calizing those critical landmarks, is included in Aug-
mented AAM framework.
4 ONE-SHOT LEARNED
TRACKING APPROACH
For a reliable data-driven tracking of landmarks of
lower limb landmarks, initially, a sophisticated de-
tector is of great importance. As detection of single
landmarks is more complicated, a detection of land-
mark subset patches is of advantage. The landmarks
of single bones can be described as such a subset.
In the following sections we introduce a one-shot
learned tracking-by-detection approach. In Section
4.1 the bone detection method will be discussed,
while Section 4.2 focuses on bone tracking and land-
mark retrieval.
4.1 One-shot Learned Detector
To distinguish positive and negative examples, the
combination of HOG features and SVM classification
was the most commonly used approach in the past
decade (Dalal and Triggs, 2005; Felzenszwalb et al.,
2010). Unfortunately, SVM training and testing is
computationally expensive, especially when applying
hard negative mining with a huge amount of training
data.
To overcome this limitation, Hariharan et al. intro-
duces in (Hariharan et al., 2012) an object detection
approach based on augmented HOG features (Felzen-
szwalb et al., 2010) and a classifier based on linear
discriminant analysis (LDA).
Their model relies on the assumption that the distribu-
tions of object instances (positives) and background
examples (negatives) follow both a Gaussian distri-
bution. Thereby, the major computational effort is
caused by the estimation of the background statistics
(corresponding to the negative samples). Estimating
the covariance matrix Σ
Σ
Σ
0
and the mean vector µ
µ
µ
0
has
to be done only ones.
For every positive class only the respective mean vec-
tor µ
µ
µ
1
has to be computed to obtain a discriminative
linear separation of the two classes
ω
ω
ω
LDA
= Σ
Σ
Σ
−1
0
(µ
µ
µ
1
− µ
µ
µ
0
) . (6)
A sliding window-based method and template match-
ing is used to compute similarity scores of a feature
vector x
x
x by a linear Whitened Histograms of Orienta-
tions (WHO) detector f (x
x
x) = hω
ω
ω
LDA
, x
x
xi. Dense sam-
pling of these features allows for matching the image
templates.
To speed up the evaluation the authors of (Freytag
et al., 2015) changed the order of computations and
reformulated the sampling task as efficient convolu-
tions. The entire set of window patches with D
C
fea-
ture dimensions in the dense tiled grid of T × T cells
are evaluated by adding D convolutions of 1×1 filters
with corresponding feature planes. Consequently, de-
rived from D = T · T · D
C
, we obtain the feature ex-
traction as efficient convolutions.
Unfortunately, the objects of interest in our applica-
tion are rotated within a certain range. Accordingly,
in the detection process, the input image needs to be
rotated. As a result, the detection result at a specific
location in the image contains a lot of multiple detec-
tions depending on the used angular resolution. Each
detection contains position information, a detection
angle and a detection score.
For the tracking algorithm the detection results are fil-
tered to obtain object hypotheses. First, the normal-
ized detection maps I
I
I
t
of every frame t are smoothed
by accumulating Gaussian filter kernels G
G
G(x, y, σ)
weighted by the corresponding detection score result-
ing in a smoothed detection map O
O
O
t
with
O
O
O
t
(i, j ) =
m
2
∑
x=−
m
2
n
2
∑
y=−
n
2
I
I
I
t
(i + x, j + y)G
G
G(x, y, σ) , (7)
where m = n describe the filter size of G
G
G(x, y, σ). In
order to extract single detection hypotheses with new
detection positions, Non-Maximum Suppression is ap-
plied to O
O
O
t
.
Based on the assumption that the highest detection
score yields the highest similarity with the model, the
related detection score and rotation angle result from
the rotation angle with the highest detection score
within a local neighborhood defined by half the ob-
ject size around the detection hypotheses is selected.
Finally, the detection scores of all frames have to be
normalized again.
4.2 Graph-based Tracking
To associate the detection results of Section 4.1, a reli-
able tracking algorithm is necessary. The graph-based
tracking approach based on (Jiang et al., 2013) uses
the detection results of Section 4.1 and is divided into
two steps. In the first step, the algorithm extracts seg-
ments of robust object trajectories by searching simi-
lar detected objects of subsequent frames.
Here, a Directed Acyclic Graph (DAG) G is for-
mulated where every detection hypothesis repre-
sents a node. We define detection hypotheses H
H
H =
Anatomical Landmark Tracking by One-shot Learned Priors for Augmented Active Appearance Models
249

{H
H
H
0
, ..., H
H
H
T
} with H
H
H
t
= {h
h
h
t,0
, ..., h
h
h
t,K
t
} where h
h
h
t,i
rep-
resents the i
th
detection hypothesis of frame t. Fur-
thermore, we add a source h
h
h
source
and a sink node
h
h
h
sink
to G = (H
H
H, E
E
E, d
d
d), E
E
E ⊆ H
H
H × H
H
H, which are fully
connected to all other nodes h
h
h
t,i
. The edge weights of
the DAG depend on the number of detection feature
weights d
p
, as for example spatial d
s
, temporal d
t
and
angular distances d
a
but also detection scores or other
detection results of adjacent detection hypotheses.
However, the non-negative edge cost function d : H
H
H ×
H
H
H with P detection features is calculated unlike (Jiang
et al., 2013) as follows:
d(h
h
h
t,i
, h
h
h
t+∆t, j
) =
P
∑
p=0
α
p
· d
p
(h
h
h
t,i
, h
h
h
t+∆t, j
)
r.t. ∆t > 0 .
(8)
The inner weight parameters α
p
of the single track-
ing priors with
∑
P
p=0
α
p
= 1 regularizes the influ-
ence of individual priors. Finding an optimal set of
weights automatically is subject of future research.
Before using a shortest path algorithm like Dijkstra
or Bellman-Ford, thresholds, θ
min
and θ
max
, based
on the used tracking priors have to be defined, such
that: θ
min
≤ d
p
≤ θ
max
. The thresholding sets con-
straints for the first stage (tracklet extraction) and set
edges which do not match the pre-condition to infin-
ity. Therefore, this constraints guarantee reliable path
segments of related detection hypothesis and prevents
mistakenly created shortest paths through the whole
graph. In the DAG the edge weights of extracted paths
are subsequently set to infinity to avoid multiple ex-
traction of the same tracklets. The tracklet extraction
process stops, if no further tracklet can be found, i.e.,
the tracklet length is smaller than 2.
Afterwards, the extracted tracklets are linked again to
whole paths within a second DAG G
0
= (H
H
H
0
, E
E
E
0
, d
0
),
E
E
E
0
⊆ H
H
H
0
× H
H
H, where H
H
H
0
= {τ
τ
τ
0
, ..., τ
τ
τ
K
0
} are the esti-
mated tracklet hypothesis and d
0
:⊆ H
0
× H
0
a non-
negative cost function similar to equation 8.
5 EXPERIMENTS
In this section we evaluate the performance of the
Augmented AAM framework extended by the intro-
duced landmark detection and tracking techniques.
We conduct our experiments on five avian locomo-
tion datasets of several bird species with focus on
sequences showing long-term object occlusion. The
datasets were recorded by a high-speed X-ray acqui-
sition system at 1000 Hz with a resolution of 1536
x 1024 pixels. Table 1 summarizes the analyzed
datasets.
Table 1: An Overview of analyzed datasets.
Name Species Frames Labeled Frames
Q1 Quail 706 22
Q2 Quail 701 15
T1 Tinamou 776 37
J1 Jackdaw 1201 46
J2 Jackdaw 1051 36
In Section 5.1 we compare different detection meth-
ods applied to two selected datasets with consider-
able self occlusions. Afterwards, results of the graph-
based tracking algorithm are shown in Section 5.2
which uses the detections retrieved as described in
Section 5.1. Finally, we use the tracking results in
Section 5.3 as powerful priors for the Augmented
AAM framework.
5.1 Comparison of the Detector Models
In general, detector models are learned from positive
object examples. The number and quality of these ex-
amples is a crucial factor for their accuracy. However,
in our application the number of annotated frames
should be as much as necessary, but as few as possi-
ble. Another challenge for learning a reliable detector
in our application is the visual appearance of the input
images. X-ray acquisition systems provide grayscale
images of low contrast. Accordingly, the detector has
to overcome issues with respect to appearance and
amount of positive training examples. Learned de-
tector models using patches around landmarks are not
representative enough concerning the high intra-class
variability. Instead of using such landmark patches,
the usage of subsets of landmarks is highly preferable
to obtain a representative robust detector model based
on examples with a low intra-class variability. Hence,
the usage of corresponding landmarks of the lower
limb bones (proximal and distal landmarks) are used
in our application to define subsets and new patches
for our detector. This is done by creating rotation nor-
malized bounding boxes around the landmark subset.
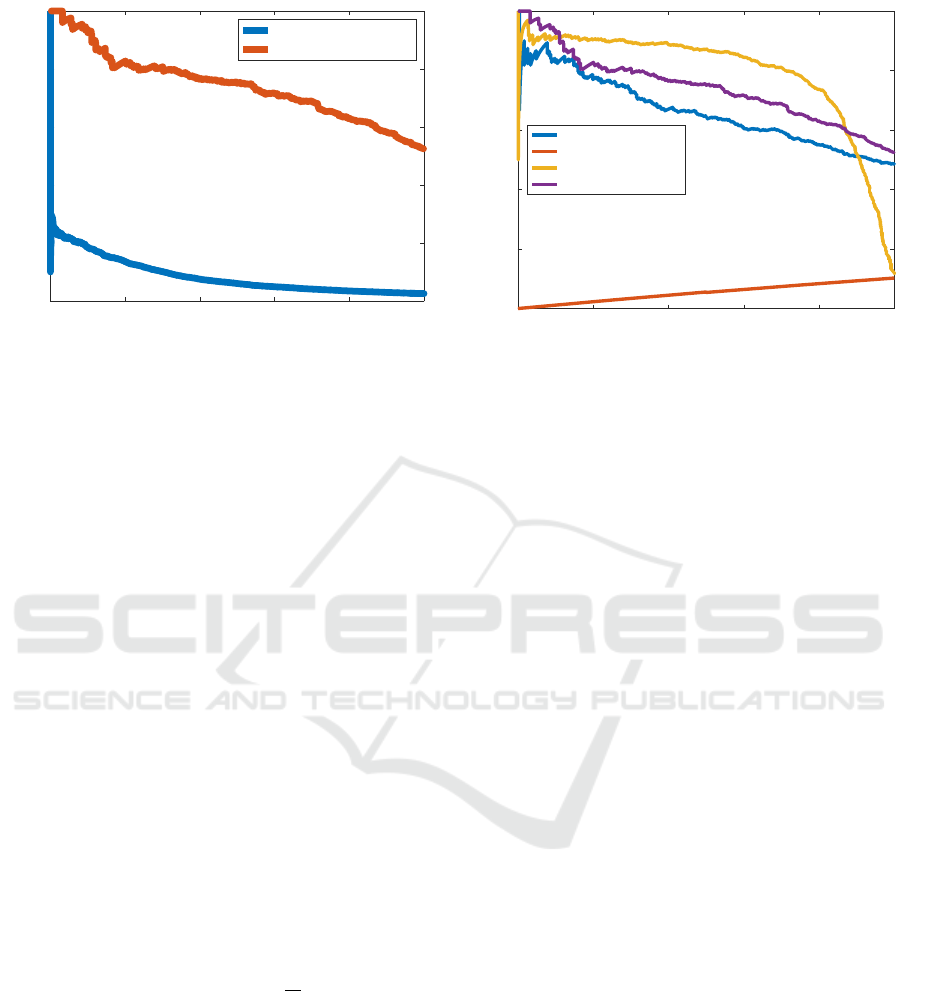
Figure 2 confirms our assumption that using landmark
subset patches instead of patches around single land-
marks for learning a detector model provides much
better detection performance.
In our experiments we applied four different detector
methods to the mentioned landmark subsets: HOG
features trained with a linear SVM using all posi-
tive examples, a WHO model trained with all positive
examples and as well as a HOG-SVM and a WHO
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
250
0 0.2 0.4 0.6 0.8 1
Recall
0
0.2
0.4
0.6
0.8
1
Precision
landmarks (0.084)
bones (0.74)
Figure 2: Detector models were trained for landmark sub-
sets patches (bones) and the single landmark patches of the
lower limb landmarks of all datasets of Table 1.
model trained with only one-shot, in other words, one
single example (one-shot learning).
HOG. The feature extraction is based on (Dalal and
Triggs, 2005) with a gradient quantization to 9 ori-
entation bins, a cell size of 8x8 pixels, a block size of
4x4 cells, and a block spacing stride of 8 pixels. A lin-
ear SVM model is trained using all annotated frames
(positive bone examples) in the training data. Another
SVM model is trained with only one representative
example of the training data. To generate negative ex-
amples, window patches were clipped around the pos-
itive example patches. During detection the image is
rotated between −90
◦
and +90
◦
with respect to bio-
logical constraints of the bone landmark subsets. For
every rotation the detector obtains object hypotheses
with information regarding position, detection score,
and rotation angle using a sliding window technique.
The chosen rotational resolution depends on the patch
size. We used a degree step of 1.
WHO. For the WHO model ω
ω
ω
LDA
the background
statistics has to be computed first. Therefore, N
0
ran-
domly unlabeled image patches were selected from
the sequence and the mean µ
µ
µ
0
is estimated by com-
puting the mean HOG feature µ
µ
µ
0
=
1
N
0
∑
N
0
i=0
E[x
x
x
i
]. The
covariance Σ
Σ
Σ
0
is estimated using the spatial autocor-
relation function (Hariharan et al., 2012). With the
assumption of independent and identically Gaussian
distributed positive and negative examples the model
training can be performed using only one positive ex-
ample. Since the LDA model ω
ω
ω
LDA
is not rotational
invariant, the sliding window technique has to be per-
formed for multiple image rotations, as well.
In a further experiment we compare the detection
methods for all datasets of Table 1. We compared
HOG-SVM models with WHO models. Both are
0 0.2 0.4 0.6 0.8 1
Recall
0
0.2
0.4
0.6
0.8
1
Precision
HOG - all (0.66)
HOG - one (0.053)
WHO - all (0.79)
WHO - one (0.74)
Figure 3: The Precision-Recall (PR) curve illustrates the
performance comparison of the applied detection methods
to all datasets of Table 1, respectively.
trained with all positive landmark and bone examples.
Afterwards, models with only one representative ex-
ample were trained. Since the detection method of
Section 4.1 applied to landmark patches yields count-
less numbers of false positives and missed detections,
we use for further experiments only those detection
results based on the bone patches.
Figure 3 illustrates the comparison of the presented
detection methods, which exhibit different detection
performances. Both models using WHO features
clearly outperform the results using HOG features,
because the estimated background statistics Σ
Σ
Σ
0
has a
large influence on the linear separation. Regarding
the whitening of the WHO features the performance
of trained WHO models are nearly equivalent, regard-
less of the number of training samples. The poor per-
formance of the model trained with one HOG fea-
ture example is caused by the weak representation of
the class, as a linear separation is nearly impossible.
Because of its very poor performance, the one-shot
learned HOG-SVM model is ignored for the follow-
ing experiments.
5.2 Online vs. Offline Tracking
In this section the graph-based tracking algorithm de-
scribed in Section 4.2 is applied to the detection hy-
potheses of Section 5.1. Every detection provides a
position information, a detection angle, a detection
frame number, and a detection score. Based on this
information the weights of the DAG G are calculated
as described in Section 4.2, where d
s
represents the
spatial distance, d
a
the angular distance, d
t
the tempo-
ral distance and d
c
the inverted summarized detection
scores between two nodes.
Anatomical Landmark Tracking by One-shot Learned Priors for Augmented Active Appearance Models
251
Image
Euclidean Landmark Error [px]
10
0
10
1
10
2
104
116
167
249
275
320
366
411
451
487
Method
STM (Amthor et al. 2012) HOG WHO (all examples) WHO (one example)
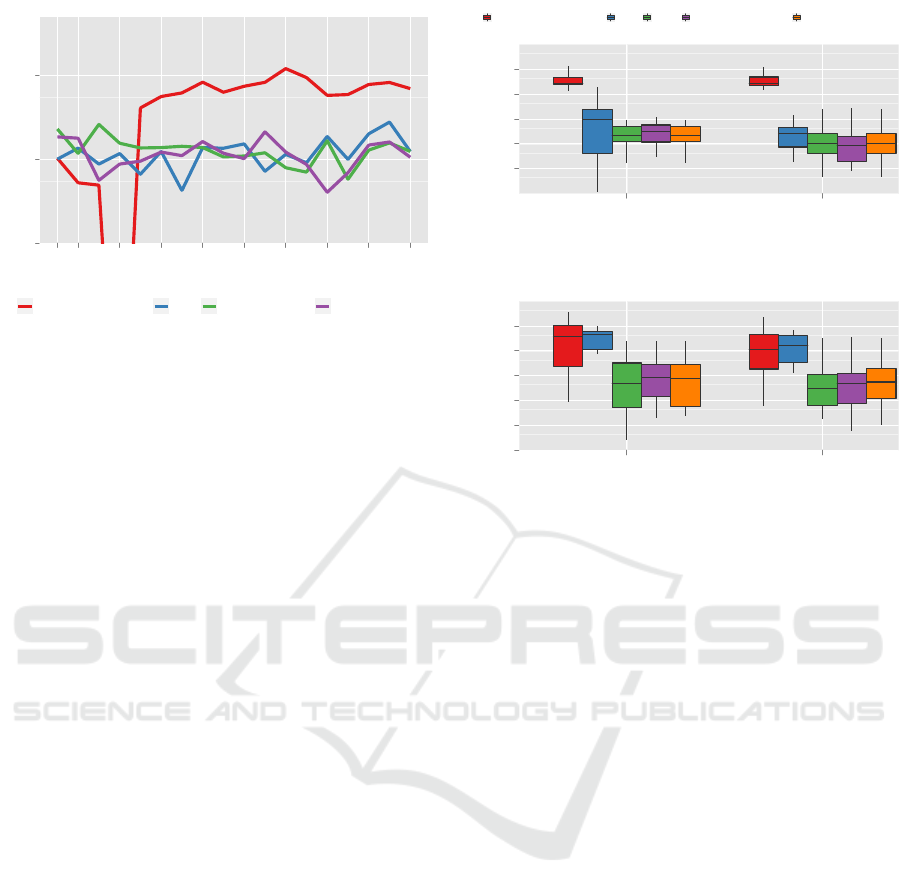
Figure 4: The detection result for the Q2-dataset from Sec-
tion 5.1 were applied to the two-staged graph-based tracker
and compared to the STM approach of (Amthor et al.,
2012). The landmark error observed over time visualizes
the drawback of the STM for cases of occlusion and tempo-
ral disappearance.
After normalizing all weights d
p
we choose uniform
inner weights α
p
for the edge cost function d. Ad-
ditionally, in the second stage (tracklet linking), the
mean velocity is calculated using position informa-
tion of all detections covered by the respective track-
lets. Based on the anatomical knowledge, especially
the length of the extracted bone examples described in
Section 5.1 and the detection angle information, it is
possible to recover the proximal and distal landmark
positions. Figure 4 illustrates the comparison of the
STM baseline with our tracking results applied to the
Q2-dataset. For all remaining datasets the Euclidean
tracking error plots show similar results. The graph
of the Euclidean tracking error clearly shows the tem-
plate drift of the STM algorithm at time step 190 after
the initial position at time step 167 where the pixel
error was close to 0 pixels. All other graphs show ro-
bust trajectories of the introduced detection methods
with an error of only 10 pixel on average. The tra-
jectories based on the WHO one-shot detector model
achieves the nearly same performance like the detec-
tors trained with all positive examples while only one
single training example was used.
5.3 A One-shot Learned Prior for
AAAMs
As an extension of the Augmented AAM framework
(Haase and Denzler, 2013), illustrated in Figure 1,
we replaced the utilized local tracking prior π
π
π
local
(Amthor et al., 2012) by our tracking-by-detection ap-
proach from Section 5.2 which is able to recover lost
templates based on global optimization in contrast to
Landmark category
Euclidean error [px]
10
1
10
1.2
10
1.4
10
1.6
10
1.8
10
2
10
2.2
10
2.4
Torso Upper leg Lower leg
Constraints
none (Standard AAMs) STM HOG WHO (all examples) WHO (one example)
Landmarks
Euclidean Landmark Error [px]
10
0.5
10
1
10
1.5
10
2
10
2.5
●
●
●
●
●
●
●
●
● ●
TMT dist
TMT prox
(b) Q1 dataset
Landmarks
Euclidean Landmark Error [px]
10
0
10
0.5
10
1
10
1.5
10
2
10
2.5
●
●
●
●
TMT dist
TMT prox
(c) Q2 dataset
Figure 5: Prior for the Augmented AAM: four different
local tracking approaches were analyzed with respect to
Euclidean landmark errors of the proximal and distal Tar-
sometatatarsi landmarks of the lower limb system. The
Standard AAM and the Augmented AAM utilizing the STM
approach as local prior serve as baseline for the comparison
to our approach (see Section 5.2).
(Amthor et al., 2012). The comparison is conducted
for all datasets of Table 1.
First, a multi-view AAM model of all landmarks and
the torso landmark subset were trained with 10 anno-
tated frames and is used as torso constraint. Based
on both available views (lateral and dorsoventral)
the epipolar geometry with the help of the Funda-
mental Matrix is estimated and is used as epipolar
constraints. Anatomical knowledge, in terms of bi-
ological distance constraints were obtained via im-
age segmentation as proposed in (Haase and Denzler,
2013). Together with one of the mentioned tracking
approaches as lower leg constraints the AAAM is for-
mulated as in Section 3.
In our experiments we compared the influence of
the different tracking priors. Figure 5 illustrates the
Euclidean landmark error of the local tracking ap-
proaches of Section 5.2 applied to the Augmented
AAM framework of (Haase and Denzler, 2013). It
can be clearly seen that the template drift problem of
the Q2-dataset (see Figure 4) using the STM tracking
approach substantially affects the performance of the
entire AAAM framework.. In contrast, our proposed
tracking prior allows for highly accurate results of the
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
252
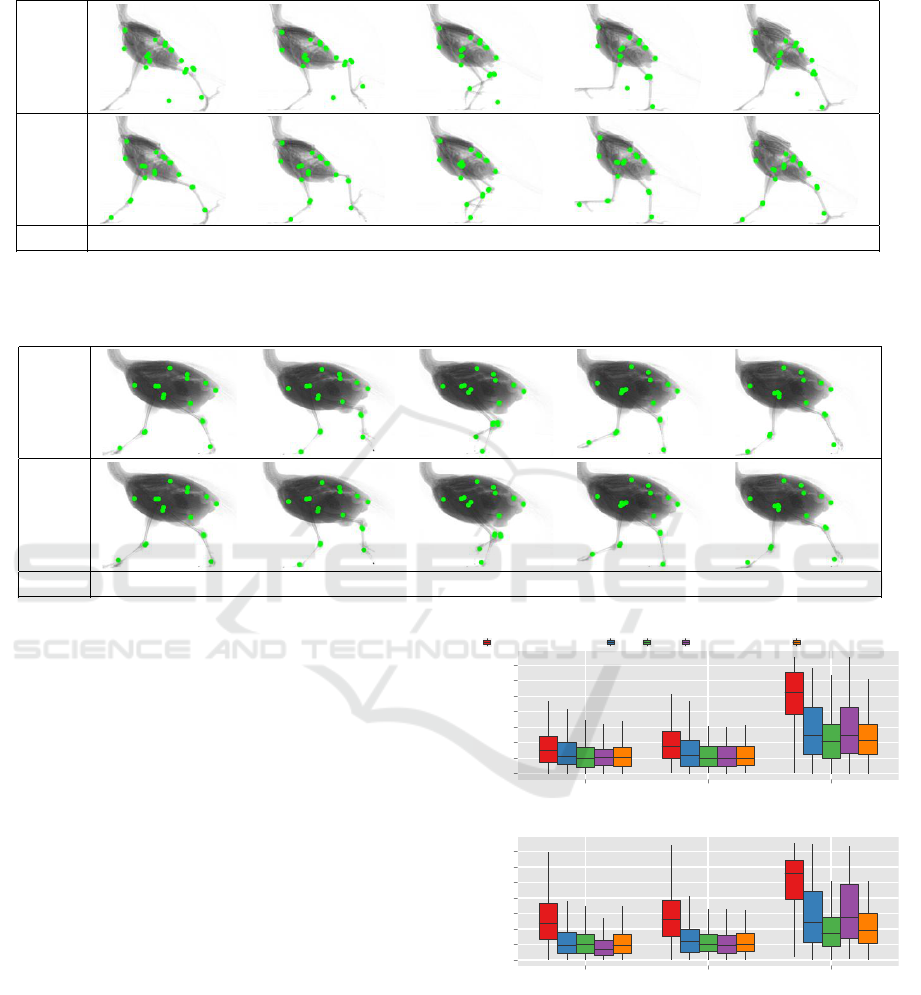
Table 2: Qualitative results of selected frames of the J2-dataset illustrate the tracked landmarks by the Augmented AAM using
the STM tracking prior (Amthor et al., 2012) and our one-shot learned tracking-by-detection prior.
STM
WHO
frame 300 350 400 450 500
Table 3: Augmented AAM using the STM tracking approach (Amthor et al., 2012) and our one-shot learned tracking-by-
detection method as local tracking prior shows in comparison to each other nearly the same accurate results applied to the
T1-dataset.
STM
WHO
frame 225 265 285 305 385
combined AAAM approach without the loss of indi-
vidual landmark subsets. In Figure 6 the average error
over all sequences of Table 1 is shown. It can clearly
be seen that our presented tracking-by-detection prior
outperforms the online tracking approach even in the
case of using only one single example for training.
6 CONCLUSIONS
In this paper we introduced a one-shot learned
tracking-by-detection prior supporting an Augmented
AAM framework for anatomical landmark retrieval in
animal locomotion analysis. In particular, a linear de-
tector was trained with only one representative pos-
itive example of a desired landmark subset in a very
fast manner. A two-staged graph-based tracking algo-
rithm generates whole trajectories of the detected hy-
potheses and recovers the single landmarks of the sub-
set. Finally, the landmark tracking results were used
as a prior for an AAM to support the model-driven
baseline algorithm and solve the model fitting task
for occluded and temporally disappeared landmarks.
We compared our approach to another local tracking
Landmark category
Euclidean error [px]
10
1
10
1.2
10
1.4
10
1.6
10
1.8
10
2
10
2.2
10
2.4
Torso Upper leg Lower leg
Constraints
none (Standard AAMs) STM HOG WHO (all examples) WHO (one example)
Landmark category
Euclidean error [px]
10
1
10
1.2
10
1.4
10
1.6
10
1.8
10
2
10
2.2
10
2.4
Torso Upper leg Lower leg
(b) dorsoventral view
Landmark category
Euclidean error [px]
10
1
10
1.2
10
1.4
10
1.6
10
1.8
10
2
10
2.2
10
2.4
Torso Upper leg Lower leg
(c) lateral view
Figure 6: For the five datasets of Table 1 an averaged eval-
uation of the two different views illustrates the Euclidean
landmark error of three landmark groups (torso, upper leg,
lower leg).
method using a frame-by-frame template matching
strategy which is very accurate in sequences with par-
tial self occlusion, but fails in case of long-term full
Anatomical Landmark Tracking by One-shot Learned Priors for Augmented Active Appearance Models
253

occlusions. In our experiments we showed that this
extension is able to improve previous results by up to
120 pixels in precision. To further improve the track-
ing precision of our proposed algorithm, a higher an-
gular as well as spatial resolution can be used, which,
however, also increases detection runtime.
ACKNOWLEDGMENTS
The research was supported by grant DE 735/8-1 of
the German Research Foundation (DFG).
REFERENCES
Amthor, M., Haase, D., and Denzler, J. (2012). Fast and ro-
bust landmark tracking in x-ray locomotion sequences
containing severe occlusions. In International Work-
shop on Vision, Modelling, and Visualization (VMV).
Eurographics Association.
Amthor, M., Haase, D., and Denzler, J. (2014). Robust pic-
torial structures for x-ray animal skeleton tracking. In
International Conference on Computer Vision Theory
and Applications (VISAPP). SCITEPRESS.
Andrada, E., Nyakatura, J. A., Bergmann, F., and Blickhan,
R. (2013). Adjustments of global and local hindlimb
properties during terrestrial locomotion of the com-
mon quail (coturnix coturnix). Journal of Experimen-
tal Biology.
Andriluka, M., Roth, S., and Schiele, B. (2010). Monocular
3d pose estimation and tracking by detection. In Com-
puter Vision and Pattern Recognition (CVPR), 2010
IEEE Conference on. IEEE.
Berclaz, J., Fleuret, F., T
¨
uretken, E., and Fua, P. (2011).
Multiple object tracking using k-shortest paths opti-
mization. Pattern Analysis and Machine Intelligence,
IEEE Transactions on.
Cootes, T., Edwards, G., and Taylor, C. (1998). Active
appearance models. In Computer Vision ECCV98.
Springer Berlin Heidelberg.
Cootes, T. F., Edwards, G. J., and Taylor, C. J. (2001). Ac-
tive appearance models. IEEE Trans. Pattern Anal.
Mach. Intell.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on. IEEE.
Dehghan, A., Modiri Assari, S., and Shah, M. (2015).
Gmmcp tracker: Globally optimal generalized max-
imum multi clique problem for multiple object track-
ing. In The IEEE Conference on Computer Vision and
Pattern Recognition (CVPR). IEEE.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrim-
inatively trained part-based models. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence.
Freytag, A., Schadt, A., and Denzler, J. (2015). Interactive
image retrieval for biodiversity research. In German
Conference on Pattern Recognition (GCPR). Springer.
Haase, D., Andrada, E., Nyakatura, J. A., Kilbourne, B. M.,
and Denzler, J. (2013). Automated approximation of
center of mass position in x-ray sequences of animal
locomotion. Journal of Biomechanics.
Haase, D. and Denzler, J. (2011). Anatomical landmark
tracking for the analysis of animal locomotion in x-ray
videos using active appearance models. In Scandina-
vian Conference on Image Analysis (SCIA). Springer.
Haase, D. and Denzler, J. (2013). 2d and 3d analysis of ani-
mal locomotion from biplanar x-ray videos using aug-
mented active appearance models. EURASIP Journal
on Image and Video Processing.
Haase, D., Nyakatura, J. A., and Denzler, J. (2011). Multi-
view active appearance models for the x-ray based
analysis of avian bipedal locomotion. In Annual Sym-
posium of the German Association for Pattern Recog-
nition (DAGM). Springer.
Hariharan, B., Malik, J., and Ramanan, D. (2012). Discrim-
inative decorrelation for clustering and classification.
In Computer Vision–ECCV 2012. Springer.
Jiang, X., Haase, D., K
¨
orner, M., Bothe, W., and Denzler,
J. (2013). Accurate 3d multi-marker tracking in x-ray
cardiac sequences using a two-stage graph modeling
approach. In Computer Analysis of Images and Pat-
terns, pages 117–125. Springer.
Kendall, D. G. (1984). Shape manifolds, procrustean met-
rics, and complex projective spaces. Bulletin of the
London Mathematical Society.
Lelieveldt, B., zmc, M., van der Geest, R., Reiber, J.,
and Sonka, M. (2003). Multi-view active appearance
models for consistent segmentation of multiple stan-
dard views: application to long- and short-axis cardiac
{MR} images. International Congress Series.
Li, L., Nawaz, T., and Ferryman, J. (2015). Pets 2015:
Datasets and challenge. In Advanced Video and Signal
Based Surveillance (AVSS), 2015 12th IEEE Interna-
tional Conference on. IEEE.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision.
Nyakatura, J. A., Andrada, E., Blickhan, R., and Fischer,
M. S. (2011). Avian bipedal locomotion. In 5th Inter-
national Symposium on Adaptive Motion of Animals
and Machines (AMAM). Elsevier.
Sun, Y., Wang, X., and Tang, X. (2013). Deep convolutional
network cascade for facial point detection. In Com-
puter Vision and Pattern Recognition (CVPR), 2013
IEEE Conference on. IEEE.
Zhang, L., Li, Y., and Nevatia, R. (2008). Global data asso-
ciation for multi-object tracking using network flows.
In Computer Vision and Pattern Recognition, 2008.
CVPR 2008. IEEE Conference on. IEEE.
Zhou, E., Fan, H., Cao, Z., Jiang, Y., and Yin, Q. (2013).
Extensive facial landmark localization with coarse-to-
fine convolutional network cascade. In Computer Vi-
sion Workshops (ICCVW), 2013 IEEE International
Conference on. IEEE.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
254
