
Cache Aware Instruction Accurate Simulation of a 3-D Coastal Ocean
Model on Low Power Hardware
Dominik Schoenwetter
1
, Alexander Ditter
1
, Vadym Aizinger
2
, Balthasar Reuter
2
and Dietmar Fey
1
1
Chair of Computer Science 3 (Computer Architecture), Friedrich-Alexander University Erlangen-N
¨
urnberg (FAU),
Martensstr. 3, 91058, Erlangen, Germany
2
Chair of Applied Mathematics (AM1), Friedrich-Alexander University Erlangen-N
¨
urnberg (FAU),
Cauerstr. 11, 91058, Erlangen, Germany
Keywords:
Environmental Modeling, Coastal Ocean Modeling and Simulation, Hardware Simulation, Hardware
Virtualization, Low Power Architectures.
Abstract:
High level hardware simulation and modeling techniques matured significantly over the last years and have
become more and more important in practice, e.g., in the industrial hardware development and automotive
domain. Yet, there are many other challenging application areas such as numerical solvers for environmental
or disaster prediction problems, e.g., tsunami and storm surge simulations, that could greatly profit from
accurate and efficient hardware simulation. Such applications rely on complex mathematical models that
are discretized using suitable numerical methods, and require a close collaboration between mathematicians
and computer scientists to attain desired computational performance on current micro architectures and code
parallelization techniques to produce accurate simulation results as fast as possible. This complex and detailed
simulation requires a lot of time during preparation and execution. Especially the execution on non-standard
or new hardware may be challenging and potentially error prone. In this paper, we focus on a high level
simulation approach for determining accurate runtimes of applications using instruction accurate modeling
and simulation. We extend the basic instruction accurate simulation technology from OVP using cache models
in conjunction with a statistical cost function, which enables high precision and significantly better runtime
predictions compared to the pure instruction accurate approach.
1 INTRODUCTION
Nowadays, unfortunately, the number of catastrophic
geophysical events like hurricanes or tsunamis is
steadily increasing. An important tool to predict
the implications of such natural disasters are accu-
rate simulations with regional or global ocean models
(two- or three-dimensional). To ensure in-time noti-
fication of to be affected regions, these simulations
have to be carried out in real time and the simulation
model has to offer sufficient spatial resolution to guar-
antee no misestimation in the affected regions. More-
over, endangered regions often do not have reliable
communication and power infrastructure, which ren-
ders running such simulations and prediction on-site
difficult or even impossible.
There is a number of state-of-the-art approaches
for flood warning systems. Running simulations of
such numerical solvers at a coarser grid resolution or
relying on less accurate numerical methods are two of
that. Two other approaches are to scan a database of
precomputed scenarios, hoping to find a similar set-
ting, or running the simulation not on-site but, e.g.
in a cloud environment. However, each of these ap-
proaches increases the risk of predicting either too
late or being too inaccurate, which can result in prop-
erty damage or even in loosing lives. As a conse-
quence, a minimum set of two requirements has to
be fulfilled, namely:
• The hardware must be able to complete the simu-
lation battery powered if the power infrastructure
collapses.
• The computation must be performed on-site to
guarantee in-time warning of inhabitants without
the need of a reliable communication network to
the rest of the world.
In 2015, we proposed a concept that enables the deter-
mination of suitable low power multi- and many-core
architectures for tsunami and storm surge simulations
fulfilling both of these requirements (Schoenwetter
et al., 2015). The concept relies on the virtual envi-
Schoenwetter, D., Ditter, A., Aizinger, V., Reuter, B. and Fey, D.
Cache Aware Instr uction Accurate Simulation of a 3-D Coastal Ocean Model on Low Power Hardware.
DOI: 10.5220/0006006501290137
In Proceedings of the 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2016), pages 129-137
ISBN: 978-989-758-199-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
129

ronment Open Virtual Platforms (OVP) to investigate
different hardware configurations, which enables em-
ulation and simulation of different low power multi-
and many-core hardware architectures on the instruc-
tion accurate level.
In this paper we investigate the accuracy of results
from the state-of-the-art instruction accurate simula-
tion environment OVP by means of comparing run-
time predictions for the NAS Parallel Benchmarks
with execution times on real hardware. We verify the
applicability of our findings to real world applications
on ARM
1
hardware by performing the same compar-
ison using the 3-D shallow-water solver UTBEST3D
(cf. Sec. 4.2).
Furthermore, we show how the accuracy with re-
spect to non-functional metrics such as runtime can be
improved by the addition of complex memory mod-
els. We present our developed memory and cache
models that can be used in conjunction with OVP as
well as a corresponding instrumentation mechanism
to track, record, and trace accesses to these models
within the simulation. Using this technique and mod-
els, we can offer a better understanding of memory
access patterns, which allows to analyze and compare
different algorithms and hardware systems. From
this, software and hardware developers can derive po-
tential improvements in their respective designs, al-
lowing for an overall better hardware-software co-
design. Furthermore, this approach permits a more
accurate performance modeling than conventional in-
struction accurate simulation techniques. For our
analysis and evaluation we compare the results from
our reference hardware, the Altera Cyclone V system
on chip (SoC) (cf. Sec. 3.2), to those obtained on the
emulated ARM part of the Altera SoC using OVP.
The rest of the paper is organized as follows: Sec-
tion 2 provides an overview of the state-of-the-art in
the use of low power architectures for high perfor-
mance computing (HPC) as well as approaches for
fast simulation and modeling. A description of the
simulation environment and used hardware is given
in Section 3, followed by details on the used bench-
marks and application in Section 4. Sections 5 and 6
present the instrumentation technique and obtained
results. The paper concludes with a summary and out-
look on future work.
2 RELATED WORK
In the last years, the research in the field of of low
power architectures for high performance computing
1
http://www.arm.com/
(HPC) constantly increased.
Rajovic et al. highlighted that low power ARM
architectures have well suited characteristics for
HPC (Rajovic et al., 2013). Their investigations fo-
cused on reducing power consumption.
A study that had a detailed look on energy-to-
solution comparisons for different classes of numer-
ical methods for partial different equations by us-
ing various architectures was published by Goeddeke
et al. (G
¨
oddeke et al., 2013). The results showed
that energy-to-solution and energy-per-time-step im-
provements up to a factor of three are possible when
using the ARM-based Tibidabo cluster (Rajovic et al.,
2014). This factor was determined by comparing
the Tibidabo cluster to a Nehalem-based x86 sub-
cluster of the LiDOng machine provided by TU Dort-
mund (ITMC TU Dortmund, 2015).
In 2013, Castro et al. (Castro et al., 2013)
compared the energy consumption and the perfor-
mance of different general-purpose as well as low
power architectures. They investigated energy- and
time-to-solution for the Traveling-Salesman prob-
lem on three architectures (Applegate et al., 2011),
namely an Intel Xeon E5-4640 Sandy Bridge-EP,
the low power Kalray MPPA-256 many-core pro-
cessor (KALRAY Corp., 2015) and the low power
CARMA board (NVIDIA Corp., 2015). In their study
both, the CARMA board as well as the MPPA proces-
sor, achieved better energy-to-solution results than the
Intel architecture.
Because of multi- and many-core hardware ar-
chitectures, detailed levels of modeling and simula-
tion are not an option, due to the fact that simula-
tion of such large systems is very time-consuming.
As a consequence, simulation approaches on higher
levels of abstraction are more promising. One such
approach is the statistical simulation, which mea-
sures and detects specific characteristics (branches,
load/store, etc.) during the execution of a program
and then generates a synthetic trace that guarantees
syntactical correctness. Afterwards, the trace is sim-
ulated (Eeckhout et al., 2004). The synthetic trace is
orders of magnitude smaller than the whole program.
As a consequence, the simulation is much more faster.
A concept of extending statistical simulation by
adding statistical memory modeling was put forward
by Genbrugge and Eeckhout in 2009 (Genbrugge and
Eeckhout, 2009). They model shared resources in
the memory subsystem of multi-processors as shared
caches, off-chip bandwidth and main memory.
An open-source hardware simulator for the
x86 architecture that uses various abstraction tech-
niques to provide accurate performance results is
Graphite (Miller et al., 2010), in which all hardware
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
130
models use further analytical timing models to guar-
antee accurate results. Using Graphite as the base,
Carlson et al. (Carlson et al., 2011) developed Sniper
that enhances the original simulator with an interval
simulation approach, a more detailed timing model,
and improvements concerning to operating system
modeling. Thus, exploring homogeneous and hetero-
geneous multi- and many-core architectures is faster
and more precise as in Graphite.
In the area of flood prediction and ocean model-
ing, a broad number of numerical models is avail-
able and actively used. Due to the large domain
sizes and long simulation times, most applications
make use of parallelization techniques to reduce
the computation time, and for many of the estab-
lished frameworks exist performance studies or per-
formance models, e.g., POP (Worley and Levesque,
2004; Kerbyson and Jones, 2005), HYCOM (Wall-
craft et al., 2005; Barker and Kerbyson, 2005), FV-
COM (Cowles, 2008), HOMME (Nair et al., 2009),
ADCIRC (Tanaka et al., 2011; Dietrich et al., 2012),
MPAS (Ringler et al., 2013), or UTBEST3D (Reuter
et al., 2015).
Most of these codes employ numerical discretiza-
tions of lower order, based on Finite Difference, Fi-
nite Element, or Finite Volume schemes. However,
higher order numerical methods can be beneficial in
the representation of convection dominated physical
processes, as outlined in a current paper by Shu (Shu,
2016). One such numerical scheme is the local dis-
continuous Galerkin method, introduced by Cockburn
and Shu (Cockburn and Shu, 1998) and applied to
geophysical flows by Aizinger and Dawson (Aizinger
and Dawson, 2002; Dawson and Aizinger, 2005).
3 ENVIRONMENT
3.1 Simulation Environment
The simulation technology from Open Virtual Plat-
forms (OVP) runs unchanged binaries in an emulated
environment described by virtual hardware models,
which can contain multiple processors and peripheral
models. Its instruction accurate simulator was devel-
oped with high simulation speeds in mind and allows
to execute or debug applications (using the integrated
GDB interface) in the virtual environment, or evaluate
the virtual platform itself. OVP provides the ability to
create new processor models and other platform com-
ponents by writing C/C++ code using the application
programming interface (API) and libraries supplied
as part of OVP (Imperas Software Ltd., 2015).
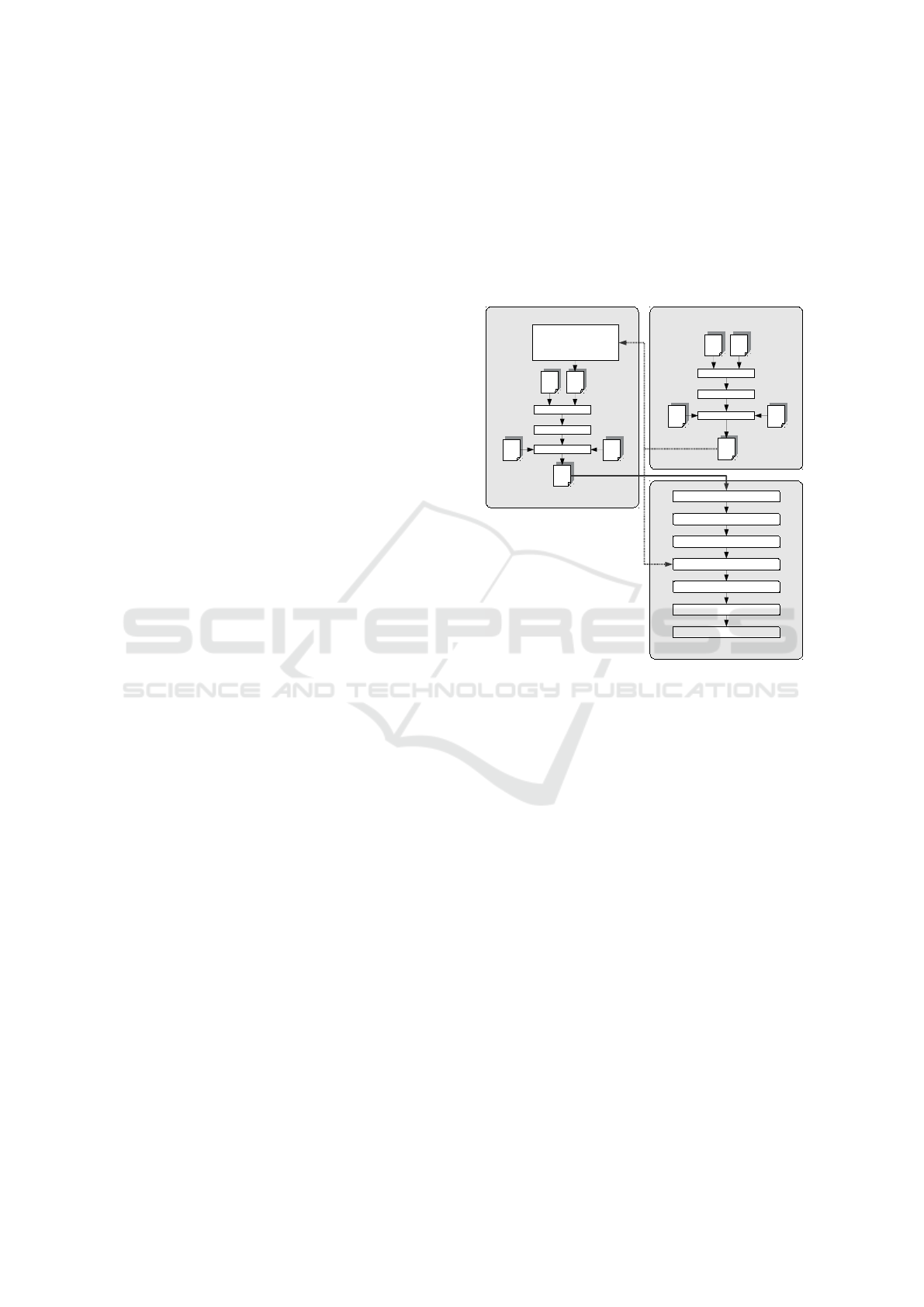
The API defines a virtual hardware platform
called ICM (Innovative CPUManager Interface), that
includes functions for setting up, running and ter-
minating a simulation (icmInitPlatform, icmSimu-
latePlatform, icmTerminate), defining components
for the simulation (e.g., icmNewProcessor), and
loading the application’s executable (icmLoadProces-
sorMemory).
icmInitPlatform(...);
icmInitPlatform(...);
icmNewProcessor(...);
icmLoadProcessorMemory(...);
icmSimulatePlatform(...);
icmTerminate(...);
Write Back Simulation Results
icmTerminate(...);
*.c
*.c
*.h
*.h
Cross-Compiler
Header Files Source Files
Cross-Assembler
Cross-Linker
*.lib
*.lib
*.ld
*.ld
Linker
ScriptLibraries
*.exe
*.exe
Executable
Application
icmLoadProcessorMemory(...);
icmSimulatePlatform(...);
*.c
*.c
*.h
*.h
Host-Compiler
Header Files Source Files
Host-Assembler
Host-Linker
*.ld
*.ld
ImperasLib
*.exe
*.exe
Executable
Platform
Imp.
lib
Imp.
lib
RUN Executable Platform
Processor ApplicationHardware Platform
Simulation
Executable
Platform
Linker
Script
icmNewProcessor(...);
Figure 1: Operating Principle of Open Virtual Platforms
Simulations.
A minimal setup for an OVP simulation requires
the definition of one processor and an application that
is to be run on the virtual platform. Figure 1 gives
an example for such a setup using a processor model
and application both provided in the C programming
language.
OVP’s instruction accurate simulator represents
the functionality of a processor’s instruction execu-
tion without accounting for such artifacts as pipelines.
This is due to the fact that the provided instruc-
tion accurate simulation cannot make clear statements
about the time spent during pipeline stalls since cache
misses and other things are not modeled. Thus, con-
versions to runtimes will have limited accuracy when
compared to actual hardware.
The simulation environment can only provide the
total amount of instructions executed. Assuming
a perfect pipeline, where one instruction is executed
per cycle, the instruction count divided by the proces-
sor’s instruction rate in million instructions per sec-
ond (MIPS) yields the runtime of the program. To
measure the instruction counts within specific code
snippets of a larger application, the OVP simula-
Cache Aware Instruction Accurate Simulation of a 3-D Coastal Ocean Model on Low Power Hardware
131
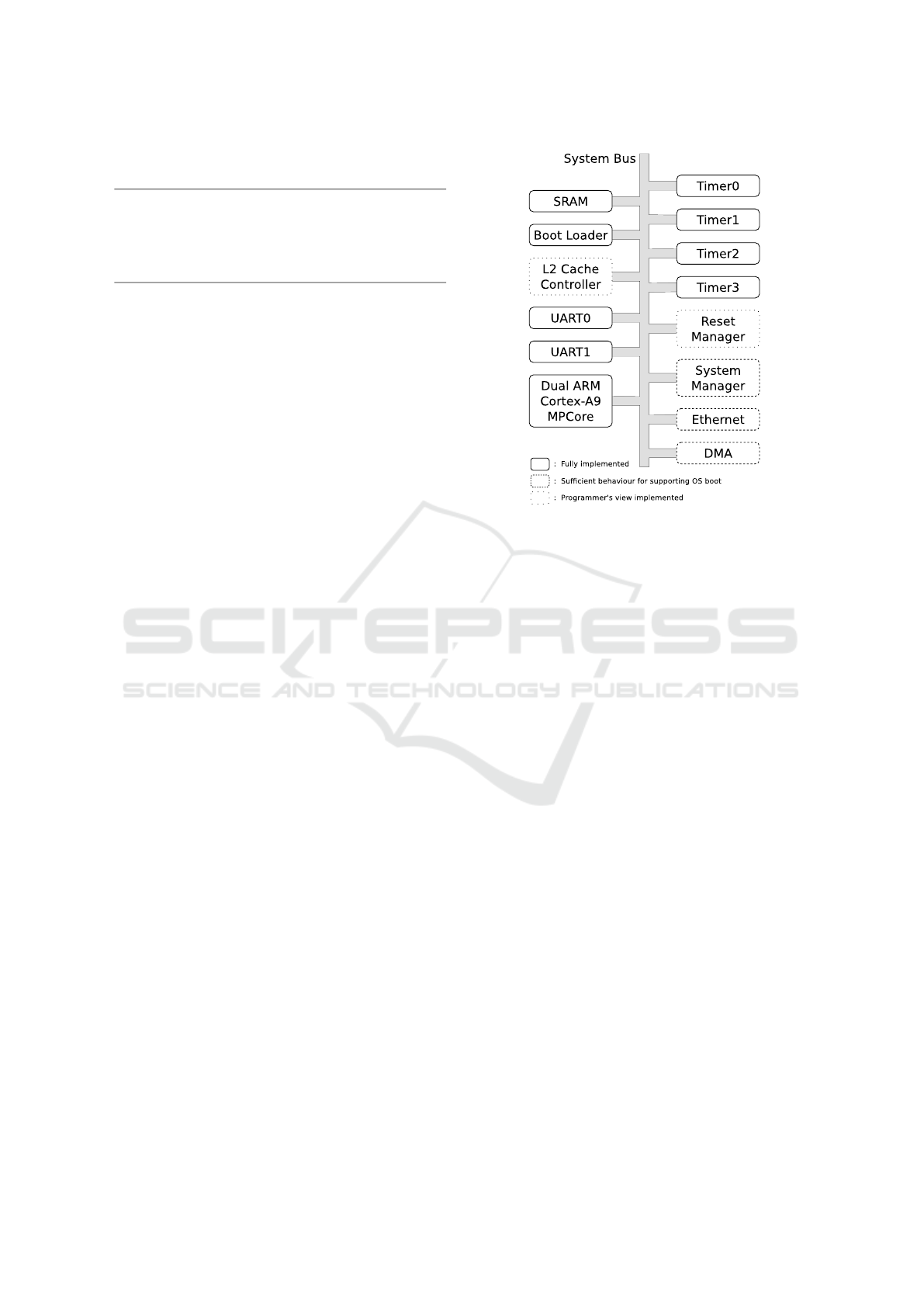
Table 1: The specifications of the hard processor system on
the Altera Cyclone V SoC.
Processor: 2x ARM Cortex-A9 @ 925 MHz
Co-processor: 2x NEON SIMD double-precision FPU
Caches per proc.: 32 KiB instruction, 32 KiB L1
Shared caches: 512 KiB L2 cache
Main memory: 1 GiB DDR3 SDRAM
Mem. interface: 40-bit bus @ 400 MHz (25.6 Gbps)
tor provides the possibility for measuring instruction
counts in parts of a program.
3.2 Reference Hardware
We use Altera’s development kit board (Altera Corp.,
2016) with a Cyclone V SX SoC-FPGA as our refer-
ence hardware platform. This SoC-FPGA includes a
hard processor system (HPS) consisting of multipro-
cessor subsystem (MPU), multi-port SDRAM con-
troller, a set of peripheral controllers, and a high-
performance interconnect. The memory controller
supports command and data reordering, error correc-
tion code (ECC), and power management. Some rel-
evant specifications of the HPS are listed in Tab. 1.
The cache controller has a dedicated 64-bit master
port connected directly to the SDRAM controller and
a separate 64-bit master port connected to the system
level 3 (L3) interconnect. All blocks of the HPS are
connected with L3 multilayer AXI interconnect struc-
ture, and low-speed peripheral controllers reside on
the level 4 (L4) AXI buses that work in separate clock
domains for efficient power management.
The programmable logic part of the SoC is a high-
performance 28 nm FPGA, which is connected to the
HPS part of the board via high-throughput (125 Gbps)
on-chip interfaces. All the applications presented in
this paper make only use of the HPS part of the SoC-
FPGA, the FPGA part is not used. The Cortex-A9
MPCore runs a Linux kernel version 3.16.0, and the
user space software is an ARM Arch Linux distribu-
tion utilizing a rolling release model.
3.3 Virtual Hardware
The virtual hardware description represents just the
relevant parts of the actual Altera Cyclone V SoC (Im-
peras Software Ltd., 2016) and neglects all units not
required for the execution of our benchmarks and ap-
plication. For example, the FPGA part of the board is
neither considered nor implemented in the virtualiza-
tion environment. Yet, all hardware components that
are necessary to run a Linux kernel and provide cor-
rect hardware functionality in our test cases are vir-
tualized. Fig. 2 depicts this subset of implemented
hardware components.
Figure 2: Schematic view of the implementation state of
the virtual Cyclone V SoC in OVP. All relevant hardware
components are sufficiently abstracted and implemented to
boot a 3.16 Linux kernel.
The virtual hardware is capable of booting the
same Linux kernel (3.16) as the real hardware. This is
very important for our considerations, as it does guar-
antee binary compatibility, i.e., the identical compiled
executable can be run on the real and virtualized hard-
ware.
4 APPLICATION AND
BENCHMARKS
Our investigations are based on an extensive artifi-
cial benchmark set representing a broad range of typ-
ical computational fluid dynamics (CFD) and HPC
application characteristics, e.g., compute and mem-
ory bound kernels. For that we use the NAS Paral-
lel Benchmark (NPB) suite (John Hardman, 2016),
i.e., the eight original benchmarks specified in NPB 1
consisting of five kernels and three pseudo applica-
tions. The findings from these benchmarks are ver-
ified using a real world HPC application, the three-
dimensional regional ocean model UTBEST3D.The
individual characteristics of UTBEST3D and the
NAS benchmarks are described in the following.
We cross-compile the application and benchmarks
for both, real hardware as well as the OVP simula-
tion to ensure binary equality and thus the best possi-
ble comparability of the obtained results. For this,
we use gfortran-arm-linux-gnueabihf for the Fortan
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
132

based and gcc-arm-linux-gnueabihf for the C based
benchmarks (both in version 4.8.2) and run the same
binaries in the real and the virtual environment.
4.1 NAS Parallel Benchmarks (NPB)
Our benchmark suite consists of eight compute ker-
nels, which are listed in Tab. 2 and described in more
detail in the following.
Conjugate Gradient Benchmark – CG: This
benchmark computes an estimate of the largest
eigenvalue of a symmetric positive definite sparse
matrix using the conjugate gradient method (Bailey
et al., 1991). Its runtime is dominated by the sparse
matrix-vector-multiplication in the conjugate gradient
subroutine. Due to the random pattern of nonzero
entries in the matrix this requires a high number of
memory accesses, leading to a low computational
intensity of this memory bound benchmark.
Multi Grid Benchmark – MG: The MG bench-
mark is based on a multigrid kernel, which computes
an approximative solution of the three dimensional
Poisson problem. In each iteration of the algorithm,
the residual is evaluated and used to apply a cor-
rection to the current solution. Its most expensive
parts are the evaluation of the residual and the
application of the smoother, both of which are stencil
operations with constant coefficients for the spec-
ified problem. The update of a grid point involves
the values of neighboring points thus, even with
an optimal implementation, this requires between
four and eight additional memory access operations
per grid point. For constant stencil coefficients,
the runtime is dominated by memory access rather
than the computational effort meaning that the MG
benchmark is memory bound.
Fourier Transform Benchmark – FT: The FT
benchmark solves a partial differential equation by
applying a Fast Fourier Transform (FFT) to the
original state array, multiplying the result by an
exponential, and using an inverse FFT to recompute
the original solution. Finally, a complex checksum
is computed to verify the result (Bailey et al., 1991).
The FFT implementation in the benchmark uses a
blocked variant of the Stockham FFT and dominates
the runtime of this benchmark. This procedure
is bound by memory operations however, due to
blocking, the limiting factor is not the memory but
rather the cache bandwidth.
Embarrassingly Parallel Benchmark – EP: EP is
an embarrassingly parallel kernel, which generates
pairs of Gaussian random deviates and tabulates
the number of pairs in successive square annuli,
a problem typical for many Monte Carlo simu-
lations (Bailey et al., 1991). The EP benchmark
is computationally expensive, complex operations
such as computation of logarithms and roots make
up a big portion of the total runtime whereas only
very few memory operations are necessary for both
random number generation and calculation of the
Gaussian pairs. The EP benchmark is compute bound.
Integer Sort Benchmarks – IS: This benchmark
sorts N integer keys in parallel, which are generated
by a sequential key generation algorithm. IS requires
ranking of an unsorted sequence of N keys, for which
the initial distribution of keys can have significant
impact on the performance of the benchmark. Thus,
the initial sequence of keys is generated in a defined
sequential manner. The performed sorting operations
are important in particle method codes and both,
integer computation speed as well as communication
performance are relevant (Bailey et al., 1991).
Lower Upper Benchmark – LU: LU uses a Gauss-
Seidel solver for lower and upper triangular systems
(regular-sparse, block size 5×5) resulting from a
discretization of compressible Navier-Stokes equa-
tions in a cubic domain and implements several
real-case features, e.g., a dissipation scheme. This
benchmark represents the computations associated
with the implicit operator of an implicit time-stepping
algorithm (Bailey et al., 1991).
Diagonal Block Matrix Benchmark – SP and BT:
The SP benchmark solves multiple, independent,
non diagonally dominant, penta-diagonal systems
of scalar equations. By contrast, BT solves multi-
ple, independent, non diagonally dominant, block
tri-diagonal systems of equations with block size
5×5. SP and BT are representatives of computations
associated with the implicit operators of CFD codes
and similar in many aspects with the essential
difference being the communication to computation
ratio (Bailey et al., 1991).
4.2 UTBEST3D
Our real-world application is UTBEST3D, a fully fea-
tured regional and coastal ocean model that, among
other applications, can be used for flood prediction.
with a numerical solution algorithm The mathemat-
ical model is the system of hydrostatic primitive
equations with a free surface (Dawson and Aizinger,
Cache Aware Instruction Accurate Simulation of a 3-D Coastal Ocean Model on Low Power Hardware
133

Table 2: List of benchmarks in the NAS Parallel Benchmark suite with their respective characteristics.
Name Description Characteristic
CG Conjugate Gradient with irregular memory access and communication memory-bound
MG Multigrid on a sequence of meshes, long- and short-distance communication memory-bound
FT Discrete 3-D Fast Fourier Transform containing all-to-all communication cache-bandwidth bound
EP Embarrasingly parallel benchmark generating random numbers compute-bound
IS Integer sort with random memory access integer comp. / comm. speed
LU Lower-upper Gauss-Seidel solver with blocking CFD-kernel
BT Block tri-diagonal solver CFD-kernel
SP Scalar penta-diagonal solver CFD-kernel
2005; Aizinger et al., 2013; Reuter et al., 2015).
The discretization is based on the local discontin-
uous Galerkin (LDG) method (Cockburn and Shu,
1998) that represents a direct generalization of the
cell-centered finite volume method, the latter being
just the piecewise constant DG discretization. One of
the features of this method is a much smaller numeri-
cal diffusion exhibited by the linear and higher order
DG approximations compared to the finite difference
or finite volume discretization. The implementation
guarantees the element-wise conservation of all pri-
mary unknowns, supports an individual choice of the
approximation space for each prognostic and diagnos-
tic variable, demonstrates excellent stability proper-
ties, and can use mesh adaptivity.
The underlying prismatic mesh is obtained by,
first, projecting a given unstructured triangular mesh
in the vertical direction to provide a continuous piece-
wise linear representation of the topography and the
free surface. The vertical columns are then subdi-
vided into layers. Due to the discontinuous nature of
the approximation spaces, no constraints need to be
enforced on the element connectivity. Hanging nodes
and mismatching elements are allowed and have no
adverse effects on stability or conservation proper-
ties of the scheme. This flexibility with regard to
mesh geometry is exploited in several key parts of the
algorithm: vertical mesh construction in areas with
varying topography, local mesh adaptivity, and wet-
ting/drying.
UTBEST3D is written in C++ to provide clean
interfaces between geometrical, numerical, compu-
tational, and communication parts of the code. The
object-oriented coding paradigm is designed to enable
a labor efficient development lifecycle of the model.
The programming techniques were carefully chosen
and tested with the view of guaranteeing a smooth
portability to different hardware architectures, oper-
ating systems, compilers, and software environments.
It is parallelized using MPI and OpenMP, however,
within this study only the serial and OpenMP-parallel
versions are used. A detailed description of the nu-
merical algorithm and the OpenMP-parallelization
can be found in (Reuter et al., 2015).
As model setup we choose a tidal scenario in
the Gulf of Mexico with an input mesh consisting
of ca. 15 000 triangles and up to 10 layers, result-
ing in ca. 18 000 prismatic elements. The simulations
are done using a barotropic model and an algebraic
vertical eddy viscosity parameterization with a total
of ca. 260 000 degrees of freedom. Simulated time
varies between 0.0001 days (UTB SER S / UTB OMP
S, cf. Sec. 6), 0.001 days (UTB SER M / UTB OMP
M), and 0.01 days (UTB SER L / UTB OMP L).
5 OVP INSTRUMENTATION AND
MODELING
The instruction accurate simulation environment of
OVP allows to track and trace each individual in-
struction in the program flow. To utilize this func-
tionality to capture memory accesses, we designed
a light weight library that allows to start and stop the
recording of memory access instructions from within
the measured application to limit data acquisition to
the relevant region of interest. This can be simply
achieved by linking the application against our library
and calling the start / stop-routines before and after the
region of interest, respectively. Since most HPC ap-
plications are written in either C/C++ or Fortran, es-
pecially legacy applications use the Fortran program-
ming language, we have implemented the library in
C, allowing to interface with both programming lan-
guages and without any additional requirements.
Additionally to the development of our library, we
extended and enhanced an existing OVP cache model
for usage in conjunction with our library. That results
in separated and configurable L1 and L2 cache mod-
els. Both models consider and distinguish the amount
of cache read and write accesses. Due to further im-
provements of our model, we are now able to detect
which SMP CPU triggered the read or write access
for both, L1 and L2. By using a suitable cost function
(cf. Sec. 6), the cache read and write accesses can be
used to better estimate the runtime of the measured
application.
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
134

0.1
1
10
100
1000
BT CG EP FT IS LU MG SP
Runtime [seconds]
Benchmark / Application
Runtimes for NAS Parallel Benchmarks (Serial)
Runtime on real hardware
Runtime with cache model
Runtime without cache model
(a) Serial execution of NAS Parallel Benchmark.
0.1
1
10
100
1000
BT CG EP FT IS LU MG SP
Runtime [seconds]
Benchmark / Application
Runtimes for NAS Parallel Benchmarks (OMP-Parallel)
Runtime on real hardware
Runtime with cache model
Runtime without cache model
(b) OpenMP-Parallel execution of NAS Parallel Benchmark.
Figure 3: Comparison of runtimes for the execution on real hardware, along with OVP based simulations without a memory
model and the estimated runtimes based on our new cache model. In all cases our cache model improves the overall accuracy,
i.e., compared to the runtimes on real hardware, significantly.
6 RESULTS
6.1 Benchmarks and Runtime
Estimates
We carried out extensive measurements for all NAS
benchmarks for both, serial and OpenMP parallelized
versions using problem class W, which is one of seven
supported classes and has a fixed problem size for ev-
ery benchmark. All benchmarks are analyzed with
respect to their runtime behavior, i.e., we compare
the results from runs on the real hardware platform
with the runtimes in the simulation environment. For
the simulation we use two types of models: (i) a ba-
sic instruction accurate model and (ii) our extended
model including a level 1 (L1) and level 2 (L2) cache
(cf. Sec. 5). We configure the L1 and L2 cache in
our model in accordance with the reference hardware
platform (cf. Sec. 3.2).
Without our cache model, the basic runtime rt
basic
is estimated by dividing the total number of recorded
instructions from the instruction accurate simulation
by the ARM Cortex-A9 CPU’s clock speed
rt
basic
=
#Instr
925 MHz
. (1)
Our observation (cf. Fig. 3) is that, generally, the es-
timated runtime rt
basic
using the basic instruction ac-
curate model in the simulation is lower than the exe-
cution on the real hardware. This is easily explained
with the fact that the simulation does not account for
the additional overhead connected to cache misses
in real hardware. The simulator assumes a constant
and thus generally too low latency for each mem-
ory access. In conjunction with our cache model,
we use a modified runtime estimate rt
cache
by adding
a penalty corresponding to the number of addition-
ally required cycles associated with an L1 or L2 cache
miss to the basic runtime estimate (1) and obtain the
total runtime as
rt
cache
= rt
basic
+ rt
pen
. (2)
Using the recorded number of L1 cache misses (L2
cache hits) and L2 cache misses we can derive a
generic cost function
rt
pen
=
#L1
miss
· 6 + #L2
miss
· 88
925 MHz
, (3)
where the penalty of 6 cycles for an L1 cache miss
(L2 cache hit) is based on the data sheet, stating a
best case delay of 6 cycles for an L1 cache miss. The
penalty of 88 cycles for L2 cache misses (data to be
fetched from main memory) was determined by us via
empirical testing.
When running the simulations with our cache
model, the results become more accurate (cf. Fig. 3).
In the best case, there is a deviation less than one per-
cent (serial SP benchmark). The same holds for the
case of OpenMP parallelization: the results are get-
ting more precise for all benchmarks when compared
to the basic instruction accurate simulations without
a cache model. While compute-bound benchmarks
(e.g., EP) still leave some room for improvement, sce-
narios that are dominated by memory access opera-
tions (such as memory bound benchmarks and CFD-
kernels) gain the most from the cache model.
6.2 Application Results
We verify our runtime estimation model (2) by
comparing the results obtained for the application
Cache Aware Instruction Accurate Simulation of a 3-D Coastal Ocean Model on Low Power Hardware
135

UTBEST3D on real hardware and in the simulation
environment. We measure a serial and an OpenMP-
parallel version of UTBEST3D with different simula-
tion lengths, divided into the three classes S, M, and
L (cf. Sec. 4.2). The results are shown in Fig. 4.
0.1
1
10
100
1000
10000
UTB SER S UTB SER M UTB SER L UTB OMP S UTB OMP M UTB OMP L
Runtime [seconds]
Benchmark / Application
Runtimes for UTBEST3D
Runtime on real hardware
Runtime with cache model
Runtime without cache model
Figure 4: Comparison of runtimes for the execution on
real hardware, along with OVP based simulations without
a memory model and the estimated runtimes based on our
new cache model for UTBEST3D.
Clearly, the runtime predictions for the real world
application are more accurate when using the cache
model with cost function (3) than the estimates ob-
tained from the basic instruction accurate simulation.
This confirms our findings from the benchmark runs.
7 CONCLUSION AND FUTURE
WORK
In this paper, we investigate and improve the basic
instruction accurate simulation technology from OVP
in order to obtain more accurate results with respect
to the runtime prediction of applications. Our results
show that state-of-the-art instruction accurate simu-
lation can be significantly enhanced by the use of
hardware specific cache models. This is an important
first step towards increasing the accuracy of the hard-
ware simulation at little additional runtime overhead.
It is especially important as both complexity as well
as execution time for simulations of future software
systems are expected to increase steadily. Further-
more, the complexity for simulations increases expo-
nentially with the complexity and size of the simu-
lated software and hardware.
We use the NAS Parallel Benchmark suite, a se-
lection of individual serial and parallel kernels that
contains a broad and representative set of applications
corresponding to application classes in the HPC do-
main to quantify the improvements provided by our
cache model. These findings are confirmed using the
real-world application UTBEST3D.
As a next step, we are going to develop and an-
alyze the impact of statistical pipeline models on the
accuracy of simulations. Since each additional level
of accuracy in the modeling phase corresponds to ad-
ditional overhead in the runtime of the simulations,
our goal is to find the sweet spot between simulation
accuracy and runtime.
REFERENCES
Aizinger, V. and Dawson, C. (2002). A discontinuous
Galerkin method for two-dimensional flow and trans-
port in shallow water. Advances in Water Resources,
25(1):67–84.
Aizinger, V., Proft, J., Dawson, C., Pothina, D., and Ne-
gusse, S. (2013). A three-dimensional discontinuous
Galerkin model applied to the baroclinic simulation of
Corpus Christi Bay. Ocean Dynamics, 63(1):89–113.
Altera Corp. (2016). Cyclone V SoC Develop-
ment Kit User Guide. https://www.altera.com/
en US/pdfs/literature/ug/ug cv soc dev kit.pdf. Last
visit on 31.03.2016.
Applegate, D., Bixby, R., Chv
´
atal, V., and Cook, W. (2011).
The Traveling Salesman Problem: A Computational
Study: A Computational Study. Princeton Series in
Applied Mathematics. Princeton University Press.
Bailey, D. H., Barszcz, E., Barton, J. T., Browning, D. S.,
Carter, R. L., Dagum, L., Fatoohi, R. A., Fred-
erickson, P. O., Lasinski, T. A., Schreiber, R. S.,
et al. (1991). The NAS parallel benchmarks – sum-
mary and preliminary results. In Proceedings of
the 1991 ACM/IEEE conference on Supercomputing,
pages 158–165. ACM.
Barker, K. and Kerbyson, D. (2005). A performance model
and scalability analysis of the hycom ocean simulation
application. In Proc. IASTED Int. Conf. On Parallel
and Distributed Computing.
Carlson, T. E., Heirman, W., and Eeckhout, L. (2011).
Sniper: Exploring the level of abstraction for scalable
and accurate parallel multi-core simulations. In In-
ternational Conference for High Performance Com-
puting, Networking, Storage and Analysis (SC), pages
52:1–52:12.
Castro, M., Francesquini, E., Ngu
´
el
´
e, T. M., and M
´
ehaut, J.-
F. (2013). Analysis of computing and energy perfor-
mance of multicore, numa, and manycore platforms
for an irregular application. In Proceedings of the
3rd Workshop on Irregular Applications: Architec-
tures and Algorithms, IA3 ’13, pages 5:1–5:8, New
York, NY, USA. ACM.
Cockburn, B. and Shu, C.-W. (1998). The Local Dis-
continuous Galerkin Method for Time-Dependent
Convection-Diffusion Systems. SIAM Journal on Nu-
merical Analysis, 35(6):2440–2463.
Cowles, G. W. (2008). Parallelization of the FVCOM
coastal ocean model. International Journal of High
SIMULTECH 2016 - 6th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
136

Performance Computing Applications, 22(2):177–
193.
Dawson, C. and Aizinger, V. (2005). A discontinuous
Galerkin method for three-dimensional shallow wa-
ter equations. Journal of Scientific Computing, 22(1-
3):245–267.
Dietrich, J., Tanaka, S., Westerink, J., Dawson, C., Luet-
tich, R.A., J., Zijlema, M., Holthuijsen, L., Smith, J.,
Westerink, L., and Westerink, H. (2012). Performance
of the unstructured-mesh, swan+adcirc model in com-
puting hurricane waves and surge. Journal of Scien-
tific Computing, 52(2):468–497.
Eeckhout, L., Bell, R. H., Stougie, B., De Bosschere, K.,
and John, L. K. (2004). Control flow modeling in
statistical simulation for accurate and efficient proces-
sor design studies. In Proceedings of the 31st Annual
International Symposium on Computer Architecture,
2004, pages 350–361. IEEE.
Genbrugge, D. and Eeckhout, L. (2009). Chip Multi-
processor Design Space Exploration through Statis-
tical Simulation. Computers, IEEE Transactions on,
58(12):1668–1681.
G
¨
oddeke, D., Komatitsch, D., Geveler, M., Ribbrock, D.,
Rajovic, N., Puzovic, N., and Ramirez, A. (2013). En-
ergy efficiency vs. performance of the numerical solu-
tion of PDEs: An application study on a low-power
ARM-based cluster. J. Comput. Phys., 237:132–150.
Imperas Software Ltd. (2015). OVP Guide to Using Pro-
cessor Models. Imperas Buildings, North Weston,
Thame, Oxfordshire, OX9 2HA, UK. Version 0.5,
docs@imperas.com.
Imperas Software Ltd. (2016). De-
scription of Altera Cyclone V SoC.
http://www.ovpworld.org/library/wikka.php?wakka=
AlteraCycloneVHPS. Last visit on 31.03.2016.
ITMC TU Dortmund (2015). Official
LiDO website. https://www.itmc.uni-
dortmund.de/dienste/hochleistungsrechnen/lido.html.
Last visit on 26.03.2015.
John Hardman (2016). Official NAS Parallel Bench-
marks Website. http://www.nas.nasa.gov/ publica-
tions/npb.html. Last visit on 12.04.2016.
KALRAY Corp. (2015). Official kalray mppa proces-
sor website. http://www.kalrayinc.com/kalray/ prod-
ucts/#processors. Last visit on 31.03.2015.
Kerbyson, D. J. and Jones, P. W. (2005). A performance
model of the parallel ocean program. International
Journal of High Performance Computing Applica-
tions, 19(3):261–276.
Miller, J., Kasture, H., Kurian, G., Gruenwald, C., Beck-
mann, N., Celio, C., Eastep, J., and Agarwal, A.
(2010). Graphite: A distributed parallel simulator for
multicores. In IEEE 16th International Symposium on
High Performance Computer Architecture (HPCA),
2010, pages 1–12.
Nair, R., Choi, H.-W., and Tufo, H. (2009). Computa-
tional aspects of a scalable high-order discontinuous
galerkin atmospheric dynamical core. Computers &
Fluids, 38(2):309 – 319.
NVIDIA Corp. (2015). Official NVIDIA SECO develop-
ment kit website. https://developer.nvidia.com/seco-
development-kit. Last visit on 31.03.2015.
Rajovic, N., Carpenter, P. M., Gelado, I., Puzovic, N.,
Ramirez, A., and Valero, M. (2013). Supercomput-
ing with commodity cpus: Are mobile SoCs ready for
HPC? In Proceedings of the International Confer-
ence on High Performance Computing, Networking,
Storage and Analysis, SC ’13, pages 40:1–40:12, New
York, NY, USA. ACM.
Rajovic, N., Rico, A., Puzovic, N., Adeniyi-Jones, C., and
Ramirez, A. (2014). Tibidabo: Making the case for an
ARM-based HPC system. Future Generation Com-
puter Systems, 36(0):322 – 334.
Reuter, B., Aizinger, V., and K
¨
ostler, H. (2015). A multi-
platform scaling study for an OpenMP parallelization
of a discontinuous Galerkin ocean model. Comput
Fluids, 117:325 – 335.
Ringler, T., Petersen, M., Higdon, R. L., Jacobsen, D.,
Jones, P. W., and Maltrud, M. (2013). A multi-
resolution approach to global ocean modeling. Ocean
Modelling, 69:211 – 232.
Schoenwetter, D., Ditter, A., Kleinert, B., Hendricks, A.,
Aizinger, V., K
¨
ostler, H., and Fey, D. (2015). Tsunami
and Storm Surge Simulation using Low Power Ar-
chitectures – Concept and Evaluation. In SIMUL-
TECH 2015 - Proceedings of the 5th International
Conference on Simulation and Modeling Methodolo-
gies, Technologies and Applications, pages 377–382.
Shu, C.-W. (2016). High order {WENO} and {DG} meth-
ods for time-dependent convection-dominated pdes:
A brief survey of several recent developments. Jour-
nal of Computational Physics, 316:598 – 613.
Tanaka, S., Bunya, S., Westerink, J. J., Dawson, C., and
Luettich, R. A. (2011). Scalability of an unstructured
grid continuous galerkin based hurricane storm surge
model. J. Sci. Comput., 46(3):329–358.
Wallcraft, A., Hurlburt, H., Townsend, T., and Chassignet,
E. (2005). 1/25 degree atlantic ocean simulation using
hycom. In Users Group Conference, 2005, pages 222–
225.
Worley, P. and Levesque, J. (2004). The performance evo-
lution of the parallel ocean program on the cray x1. In
Proceedings of the 46th Cray User Group Conference,
pages 17–21.
Cache Aware Instruction Accurate Simulation of a 3-D Coastal Ocean Model on Low Power Hardware
137
