
Internet of Things for Flexible Manufacturing Systems` Diagnosis
Calin Ciufudean and Corneliu Buzduga
Stefan cel Mare University, 13 University, Suceava, Romania
Keywords: Internet of Things, Flexible Manufacturing System, Discrete Event Model, Memory Buffer, Markov Chain.
Abstract: This paper deals with an actual topic concerning the diagnosis of Internet of Things (IoT) controlled flexible
manufacturing systems (FMS). We focus on models realized with Markov chains of FMS with stochastic and
not equal throughput rates. Discrete-event models assume that FMS is decomposed, and we study the
following events: an Internet server fails, an Internet server is repaired, an Internet server memory buffer fills
up, an Internet server memory buffer empties. The IoT diagnosis is performed with by calculating the time to
absorption in Markov model of the IoT controlled FMS. Future development of IoT diagnosis of FMS are
also discussed in this work.
1 INTRODUCTION
In this work, we assume that a flexible manufacturing
system controlled and monitored by Internet of
Things (IoT) is similar to a discrete event system
(DES) and we model it in a discrete stochastic space.
Absorbing states of Markov chain models display
a steady-state i.e., the absorbing state attended after
time T; therefore, only transient analysis displays the
system performance. Our approach deals with an IoT
controlled system which displays in time a trajectory
modelled with a Markov chain
0} t {x(t); ≥
with state
space
...} 1, {0, S =
and space generator W. Let i, j ∈S
and, we have (Viswandham, 1992), (Kemeny, 1960):
i} j/ x(0) P{x(t) (t) p
j
i
===
(1)
(t)] [p A(t)
ij
=
(2)
The following equations describe the behavior of
the above mentioned Markov chain (Buzacott, 1993),
(Narahari, 1994), (Ciufudean, 2008), (Viswandham,
1994):
W A(t) [A(t)]
dt
d
⋅=
(3)
A(t) W *[A(t)]
dt
d
⋅=
(4)
Where A(0) = I. For matrix components we have:
)t(pw (t) p . w (t)][p
dt
d
ik
jk
kjijijij
∑
=
⋅+=
(5)
∑
=
⋅+=
ik
kjikijiiij
)t(pw (t) p . w (t)][p
dt
d
(6)
The solution is:
tW
e A(t)
⋅
=
(7)
()
∑
∞
=
⋅
⋅
=
0k
k
tW
!k
tW
e
(8)
The state probabilities
...] (t),p (t),[p Y(t)
10
=
where
S jj},=P{x(t) = (t)p
j
∈
, are given by the
following equation:
W. Y(t) Y(t)] [
dt
d
=
(9)
The solution is:
tW
e . Y(0) Y(t)
⋅
=
(10)
i} X(0)j/ P{X(t) (t)p
ij
===
(11)
For t > 0, and T the time to reach the absorbing state,
we obtain:
n)}+m , ... 1,+(m P{X(t) = t}> P{T ∉
(12)
Where m
≥
0, n > 0, we have (m+1) states, and the
next states are absorbing ones.
()
∑
=
+
=>
n
1j
jm,0
tp - 1 t} P{T
(13)
468
Ciufudean, C. and Buzduga, C.
Internet of Things for Flexible Manufacturing Systems‘ Diagnosis.
In Proceedings of the 5th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2016), pages 468-471
ISBN: 978-989-758-184-7
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved
Then time interval T may be displayed by:
()
∑
=
+
=
n
1j
jm,0T
tp (t)F
(14)
Where
(t)p
j
m0,
+
is given by equation (3) (Ciufudean,
2008), (Viswandham, 1994), (Dallery, 1992).
2 THE MODEL FOR IOT
DIAGNOSIS OF FMS
The basic cell of the IoT system diagnosis of a FMS
consists of a computer e.g. server connected to
Internet, S
i,
with memory buffer and its downstream
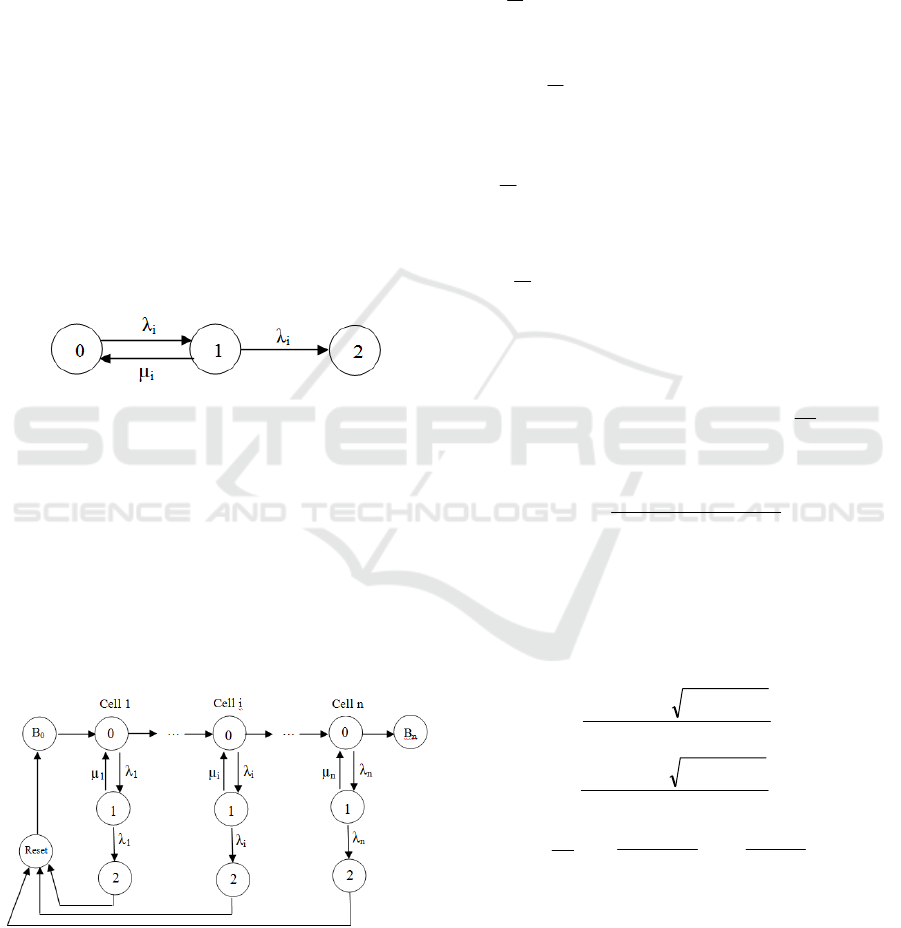
machine from the FMS. In figure 1 we depicted the
Markov chain model of the one of the n identical cells
of our model for IoT control and diagnosis of a FMS,
where n represents the number of servers necessary to
control the FMS (Ciufudean, 2008).
Figure 1: The basic model of Markov chain for IoT
diagnosis.
The meaning of the cell depicted in figure 1 is that
the server S
i
is in state 0 when there is no information
to process, and there is the transfer of the information
to/from machines of FMS. In state 1, we process
information, and a deadlock occurs in state 2.
Information bits transfer rate is
i
λ
and the servers
processing rate of information bits is
i
μ
. The Markov
chain model for IoT diagnosis of FMS is depicted in
figure 2.
Figure 2: Markov chain model for IoT diagnosis of FMS.
Here T is the time elapses until deadlock occurs,
and deadlock is a probability
(t).p (t)Da
02T
=
In order
to determine
(t)p
02
we will use the generator W of
the above depicted Markov chain:
()
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
λμ+λ−μ
λλ−
=
000
iiii
0
ii
W
(15)
From equation (6) we have the probability
:(t)p
02
(t)
22
p .
02
w (t)
12
p .
01
w (t)
02
p .
00
w)t(
02
p
dt
d
++=
(16)
But we also have w
02
= 0, and therefore:
)t(
12
p
i
)t(
02
p
i
)t(
02
p
dt
d
⋅λ+⋅λ−=
(17)
Similar, for
(t)p
12
we have:
(t)
22
p .
12
w (t)
12
p .
11
w (t)
02
p .
10
w)t(
12
p
dt
d
++=
(18)
And
1 (t)p
22
=
, and therefore:
i
)t(
12
p)
ii
()t(
02
p
i
)t(
12
p
dt
d
λ+⋅μ+λ−⋅μ−=
(19)
Where
(s)p
ij
is the Laplace transform of :(t)p
ij
()
()
ss
12i02i02
pp (s)sp λ+λ−=
(20)
()
()
()
s
ss
i
12ii02i12
pp (s)sp
λ
⋅μ+λ−μ= +
(21)
Equations (20) and (21) determine:
()
[]
2
iii
2
2
i
02
2ss
(s)p
s λ+μ+λ+
λ
=
(22)
And equations (22) have as solution the
probability
(t)p
02
:
eC eB A (t)p
-bt-at
02
⋅+⋅+=
(23)
Where, a, b, A, B, C are [2, 3]:
2
4
a
ii
2
iii
2 μλ+μ
=
+μ+λ
(24)
2
4
b
ii
2
iii
2 μλ+μ
=
−μ+λ
(25)
ab
i
A
λ
=
;
()
()
abab
B
a2b
i
−
λ
=
−
;
()
abb
i
C
−
λ
=
(26)
3 THE EVENTS OF MEMORY
BUFFERS
For components manufactured in FMS, the transition
from one event to next event depends on current state
Internet of Things for Flexible Manufacturing Systems‘ Diagnosis
469
and on the generator W of the FMS. So, we may say
that in a FMS controlled by IoT deadlocks have
mainly two possibilities of diagnosis: a blocked
server empties its memory or information less (e.g.
empty server) commands its downstream machine.
Therefore the events dynamic is determined by
information which flow both way from S
i
to the
downstream machine. We consider a FMS controlled
by servers S
i-1
, S
i
and S
i+1
, and the memory buffers B
i-
1
and B
i
.
We assume that an event occurs at time t and let
TA be the apparent time of the next event. We have:
i
μ
is the information processing speed (bits-
unit/time-unit) of server S
i
, i = 1, ... , n.
⎪
⎩
⎪
⎨
⎧
=
repairunderis
i
Sif0,
functionalis
i
Sserverif1,
t)S(i,
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
stateotherwise1,
fullis
j
Bbufferif2,
emptyis
j
Bbufferif,0
t)B(j,
⎩
⎨
⎧
=
otherwise0,
ttimeatemptiesBif1,
BEj(t)
j
T
1j
(t) Time necessary to store information in B
j
T
2j
(t) Time necessary to deliver information from B
j
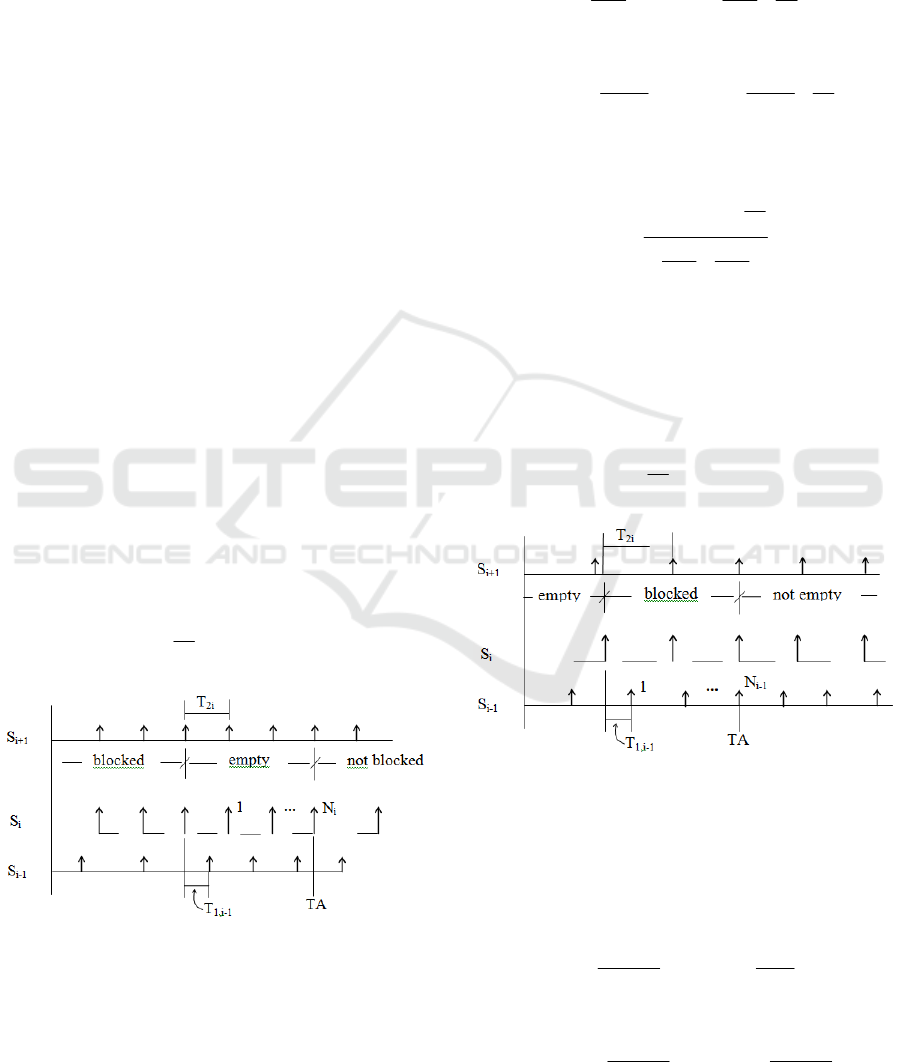
We have the following scenarios:
First scenario: server S
i+1
is faster than S
i-1
. This is
modeled in figure 3 and we have (Ciufudean, 2008),
(Viswandham, 1994), (Dallery, 1992):
)() T (T
1i1i
i
1-i1,21
1
−+
μ>μ∩
μ
+>
(27)
Figure 3: Dynamic of servers when S
i+1
is faster than S
i-1
.
In figure 3 and 4 we depicted with continuous line
server data processing and with arrows we depicted
data flow (Ciufudean, 2008), (Viswandham, 1994),
(Dallery, 1992). Intervals blank mark the idle
processing time due to blockage/repair of servers.
Memory buffer B
i
empties from full memory. The end
of processing time of the (N
i
+1) bits on server S
i
is
greater than the time when memory B
i
empties. The
dual case is for the first N
i
bits. Therefore we have
(Martinelli, 2001):
1
N
T t
N
T t
i1i
i
1-i 1,
1i
i
2i
μ
+
μ
++<
μ
++
−+
(28)
and
i1i
i
1-i 1,
1i
i
2i
1
1N
T t
1N
T t TA
μ
+
μ
−
++≥
μ
−
++=
−+
(29)
For B
i
equations (27) and (28) estimate the bits to
next event:
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
μ
−
μ
μ
−−
+=
+−
−
1i1i
i
1i,1i2
i
11
1
TT
Int 1 N
(30)
Another scenario studied here is dual to first discuss:
server M
i-1
process data faster than server S
i+1
and the
empty server S
i
fills its memory buffer B
i
(Di
Benedetto, 2001), (Harrell, 2014), (Dolin, 2015),
(Storey, 2014). After that, server S
i-1
processes N
i-1
bits, and blockage is modeled in figure 4.
()
1i1i
i
1-i 1, 2i
1
T T
+−
μ>μ∩
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
μ
+>
(31)
Figure 4: Dynamic of servers when S
i-1
is faster than S
i+1
.
Figure 4 shows that arrival time of 1)(N
1-
i
+ bits
at buffer B
i-1
is less than the processing time of server
S
i
. The dual case holds for the first N
i-1
bits
(Vermesan, 2014), (Ciufudean, 2009), (Ciufudean,
2007), (Ciufudean, 2006). Therefore we have:
1i
1i
1-i 1,
1i
1i
2i
N
T t
1N
T t
−
−
+
−
μ
++>
μ
−
++
(32)
and
1i
1i
1-i 1,
1i
1i
2i
1N
T t
1N
T t TA
−
−
+
−
μ
−
++≤
μ
−
++=
(33)
MoMa-GreenSys 2016 - Special Session on Modelling Practical Paradigms of Green Manufacturing Systems
470

Similar with the first scenario, for B
i-1
we estimate
the next event:
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
μ
−
μ
μ
−−
+=
−+
+
−
1i1i
1i
i21i,1
1-i
11
1
TT
Int 1 N
(34)
Equations (29) and (33) allow us to avoid the
above mentioned scenarios of deadlocks by fairly
dimensioning the buffers, and taking into
consideration flow rate of bits until next event: T
21
=
p
02
in relation (29) and, respectively, T
1,i-1
= p
02
in
relation (33); where p
02
is given by relation (23)
(Ciufudean, 2008), (Ciufudean, 2007).
As we proved in this paper the failure/blocking of
servers can be avoided, if the buffer size is bigger than
the critical size (e.g. the size determined with
equations (30), (33), (34). The necessary and
sufficient condition is to have an average time to
repair a server smaller than the average time to fill the
memory of server.
4 CONCLUSIONS
A model for IoT diagnosis of a FMS diagnosis has
been proposed in this paper. The model may be
obtained with our discrete-event approach or using
heuristic models.
A discrete-event system formulation and FMS
controlled by IoT connected by processing cells and
fast determines an accurate diagnosis at an increased
speed and costless. We observe that if the
deadlock/repair time is known and the duration of
diagnosis estimation is less than it, then transient
analysis is more appropriate than the steady state
analysis.
Further development of this approach should
focus on intelligent flexible manufacturing systems
modeled with Markov chains which have self-
recovery algorithms from deadlock situations.
REFERENCES
Viswandham, N., Narahari, J., 1992. Performance
Modeling of Automated Manufacturing System
,
Englewood Cliffs, NJ: Prentice Hall.
Kemeny, J., Snell, W., 1960.
Finite Markov Chains, Van
Nostrand.
Buzacott, J., A., Shantikumar, J., G., 1993.
Stochastic
Models of Manufacturing System
, Englewood Cliffs,
NJ: Prentice Hall.
Narahari, J., Viswandham, N., 1994. Transient Analysis of
Manufacturing System Performance,
IEEE Trans on
Rob and Autom., vol. 10
, no. 2.
Ciufudean, C., Satco, B., 2008. Algebraic formalism for
modelling the deadlock in flexible manufacturing
systems,
Jurnal of Applied Mathematics, vol.1, no.3,
pp. 157-165.
Viswandham, N., Ram, R., 1994. Composite performance-
dependability analysis of cellular manufacturing
systems,
IEEE on Rob and Autom., vol. 10, no. 2.
Dallery, J., Gershwin, S., B., 1992. Manufacturing flow line
systems: A review of models and analytical results,
Technical Report 91-002,
Laboratory for
Manufacturing and Productivity, MIT
.
Martinelli, F., Shu, C., Perkins, J.R. 2001. On the
Optimality of Myopic Productions Controls for Single-
Server Continuous-Flow Manufacturing Systems,
IEEE Trans. Autom. Contr., vol.46, no.8, pp.1269-
1273, 200.
Di Benedetto, M., D., Vintecentelli, A., S., Villa, T., 2001.
Model Matching for Finite State Machines,
IEEE
Trans. Autom. Contr., vol.46
, no.11, pp.1726-1743.
Harrell, C., 2014, The Internet of Things and Control
System Architecture, http://blog.aac.advantech.com/th
e-internet-of-things-and-control-system-architecture.
Dolin, R., 2015, Building an IoT for industrial control: Part
1 – What is Industrial IoT? ,http://www.embedded.com
/design/real-world-applications/4426952/Building an
IoT for industrial control. Part 1 What is Industrial IoT?
Storey, H., Bullotta, R., Drolet, D. 2014, The industrial
internet of things ,http://www.controleng.com/industry
-news/single-article/the-industrial-internet-of-things/c9
8837a0efec387df9fc14c2de0a3b2f.ht,.
Vermesan, O., Friess, P., (Eds.), 2014. Internet of Things –
From Research and Innovation to Market Deployment,
River Publishers, Aalborg, Denmark.
Ciufudean, C., Filote, C., 2009. Safety discrete event
models for Holonic cyclic manufacturing systems in
Holonic and Multi-Agent Systems for Manufacturing,
pp. 225-233,
Springer Berlin Heidelberg.
Ciufudean, C., Filote, C., Amarandei, D., 2007. Measuring
the Performance of Distributed Systems with Discrete
Event Formalisms,
Proc. of The 2nd Seminar for
Advanced Industrial Control Applications
, SAICA,
Madrid, Spain.
Ciufudean, C., Graur, A., Filote, C., Turcu, C., Popa, V.,
2006. Diagnosis of complex systems using ant colony
decision petri nets, Availability, Reliability and
Security.
ARES 2006. The First International
Conference on, Vienna, Austria.
Ciufudean, C., Satco, B., Filote, C., 2007. Reliability
Markov chains for security data transmitter analysis,
Availability, Reliability and Security.
ARES 2007. The
Second International Conference on, pp. 886-894.
Internet of Things for Flexible Manufacturing Systems‘ Diagnosis
471
