
Driver Assistant in Automotive Socio-cyberphysical System
Reference Model and Case Study
Alexander Smirnov
1,2
, Alexey Kashevnik
1,2
, Nikolay Shilov
1,2
and Igor Lashkov
2
1
SPIIRAS, 39, 14 Line, St. Petersburg, Russia
2
ITMO University, 49 Kronverksky Pr., St. Petersburg, Russia
Keywords: Socio-cyberphysical System, ADAS Systems, In-vehicle System, Ford Sync.
Abstract: The paper presents an automotive socio-cyberphysical system for assisting a vehicle driver. The system allows
to notify people if they drive while being tired or drowsy. The reference model consist of the driver, the
vehicle, driver’s personal smartphone, vehicle infotainment system and cloud. Interaction of these
components is implemented in a cyber space. Using smartphone cameras, the system determines the driver
state using the computer vision algorithms and dangerous events identification diagram proposed in the paper.
Presented approach has been implemented for Android-based mobile device and case study has been
described in the paper.
1 INTRODUCTION
Vehicle driver assistance is an important modern
research and development topic. In the last decades
the amount of accidents on the road has remained
high. Advanced driver assistance systems are aimed
to help drivers in the driving process and prevent
dangerous events by alerting the driver about unsafe
driving conditions and behavior (Biondi et al., 2014).
Such systems use computer vision and machine
learning algorithms to monitor and detect whether the
driver is tired or distracted using available sensors
and cameras. There are two major types of driver
assistant solutions available: solutions integrated in
the vehicles and application for smartphones or tablet
PCs that detect dangerous situations and makes alerts
for drivers. However, only a tiny percentage of cars
on the road today have these systems. These
technologies are quite new and accessible only in
business and luxury vehicle segments. At the same
time a lot of car manufactures develop vehicle
infotainment systems that transformed from simple
audio players to complex solutions that allow to
communicate with popular smartphones, share
information from different vehicle sensors and
provide possibilities to deliver information through
in-vehicle screen or stereo system (like Ford SYNC,
GM OnStar MyLink
TM
, Chrysler UConnect
®
, Honda
HomeLink, Kia UVO, Hyundai Blue Link, MINI
Connected, Totyota Entune, BMW ConnectedDrive
systems, and other).
There are a lot of mobile applications that aimed
to implement driver assistant while driving. The
analysis of these applications is presented in
(Smirnov and Lashkov, 2015). The following systems
can be highlighted: CarSafe (You et al., 2013),
DriverSafe (Bergasa, 2014), WalkSafe (Wang et al.,
2012). In the paper (Aurichta and Stark, 2014)
authors formalise user experience and study how it
can be integrated in the validation process of
Advanced Driver Assistance Systems.
Driver, vehicle, smartphone, and software
services partly integrated in the mobile application
and partly accessible in the cloud are considered as a
socio-cyberphysical system that integrates physical
space (driver and vehicle), social space (driver), and
information space (smartphone with mobile
application, software services, and vehicle
infotainment system).
This paper extends research work presented in
(Smirnov et al., 2014) that aims at context-driven on-
board information support and providing the driver
services needed for him/her at the moment.
The rest of the paper is structured as follows.
Section 2 presents reference model of socio-
cyberphysical system for driver assistance. Section 3
considers a case study that contains driver assistant
system scenario, dangerous events identification
diagram that is used to determine dangerous events
based on information from smartphone cameras and
104
Smirnov, A., Kashevnik, A., Shilov, N. and Lashkov, I.
Driver Assistant in Automotive Socio-cyberphysical System - Reference Model and Case Study.
In Proceedings of the International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2016), pages 104-111
ISBN: 978-989-758-185-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

available vehicle sensors, and implementation. Main
results and findings are summarized in the
conclusion.
2 REFERENCE MODEL
The reference model of the proposed automotive
social-cyberphysical system is presented in Figure 1.
It consists of:
driver (belongs to social space and physical
space);
vehicle (belongs to physical space);
smartphone (belongs to information space);
cloud (belongs to information space);
vehicle infotainment system (belongs to
information space)
The driver interacts with the smartphone and with
the vehicle while the vehicle interacts with the vehicle
infotainment system. The smartphone interacts with
the cloud to store generic information about the
driver’s behaviour and shares it with other driver
assistant systems.
Information for analysing the driver behaviour is
collected by the mobile application component from
the front-facing and rear-facing cameras. Also, this
component acquires information from vehicle sensors
using vehicle infotainment system (such as the speed,
location, and road signs). Internal components of the
mobile application are context-aware camera
switcher, application business logic, user interface,
computer vision, analysis module, and computation
planner. To acquire information from driver face and
from the road, a context-aware algorithm is used that
switches between the two cameras while processing
the data in real-time. The image processing unit is
responsible for extracting the visual features from the
images taken by the rear and front cameras. The
computation planner aims to effectively leverage the
multi-core architecture of modern smartphones to
perform heavy calculations. Local database is
responsible for storing data collected from the
smartphone. This data is synchronized with the cloud
to be shared with other driver assistant systems.
Such information as smartphone characteristics,
application usage statistics, and dangerous events
occurred during trip is stored for using in the future.
Smartphone characteristics are GPU, sensors (GPS,
Accelerometer, Gyroscope, Magnetometer), cameras
(front-facing / rear-facing), memory & battery
capacity, and version of operation system. In
addition, the cloud storage is used for keeping
behaviour patterns and driving style patterns.
Operations that can be carried out in the cloud storage
are:
recognition of true and false drivers estimations
of dangerous events recognition;
behavior and driving style patterns matching;
analysis and classification of driver behavior
and driving style for generating
recommendations for safe driving;
When the dangerous state is determined, the
driver is notified using the possibilities provided by
vehicle infotainment system. The system allows to
display information on vehicle screen, use audio
system for sound notification, use text to speech
function to provide the driver audio message, and use
the steering wheel vibration to notify the driver.
The system is focused on the behavioural and
physiological signals acquired from the driver to
assess his/her mental state in real-time. In the
presented approach, the driver is considered as a set
of mental states. Each of these states has its own
particular control behaviour and interstate transition
probabilities. The canonical example of this type of
model would be a bank of standard linear controllers
(e.g., Kalman Filters plus a simple control law). Each
controller has different dynamics and measurements,
sequenced together with a Markov network of
probabilistic transitions. The states of the model can
be hierarchically organized to describe the short and
long-term behaviours by using the driver ontology
that includes visual cues and visual behaviours and
determines relationships between them.
The vehicle drivers are faced with a multitude of
road hazards and an increasing number of distractions
(e.g. music, phone calls, smartphone texting and
browsing, advertising information on the road, and
etc.) that is described by the vehicle ontology. The
driver and vehicle ontologies are described in
(Lashkov et al., 2015).
3 CASE STUDY
3.1 Driver Assistance Scenario
The driver assistance scenario is shown in Figure 2.
The driver assistant system uses smartphone front and
rear cameras to recognize the driver’s emotional state.
Vehicle infotainment system provides with the
driver assistant system information gathered from the
vehicle sensors (location, speed, fuel level, road
signs, etc.). Driver's state (emotion, fatigue) and
information from vehicle sensors together represent
the current situation in the car.
This current situation is analyzed by the vehicle
infotainment system and based on this analysis alerts
Driver Assistant in Automotive Socio-cyberphysical System - Reference Model and Case Study
105
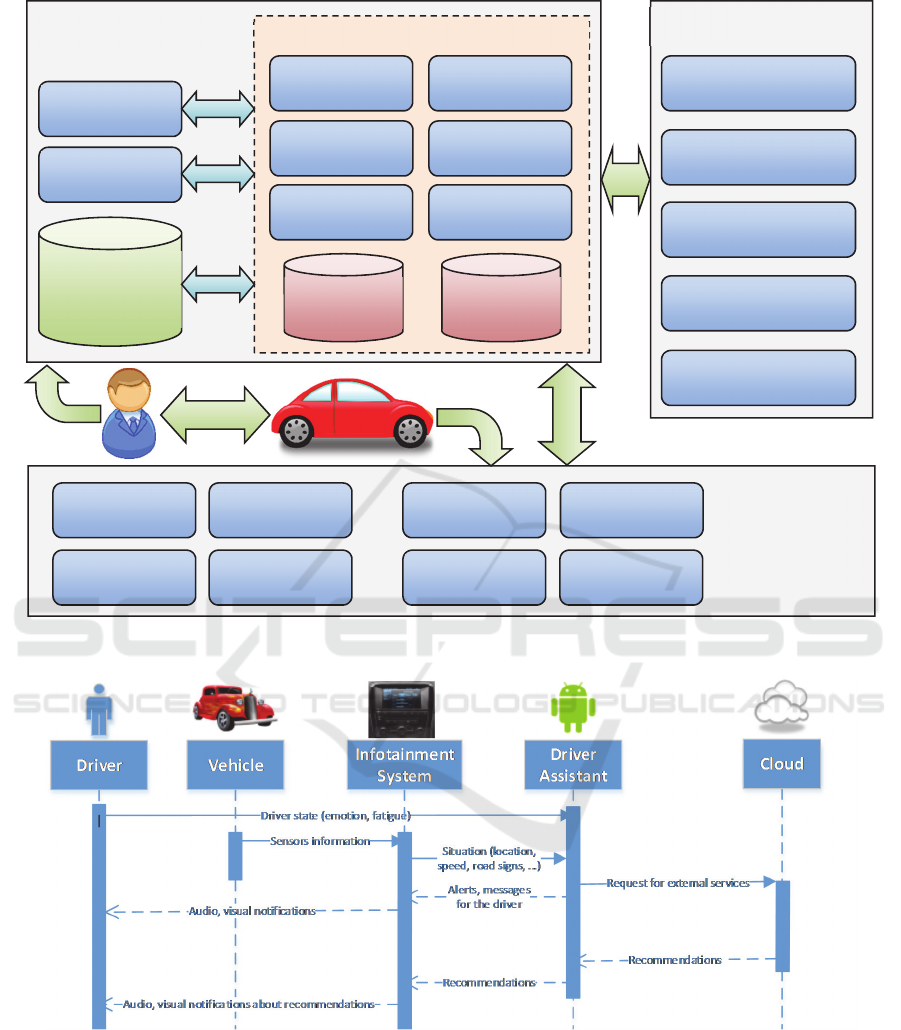
Figure 1: Reference model of the proposed automotive social-cyberphysical system.
Figure 2: Driver assistance scenario.
are formed for the driver or request to the external
recommendation services is created.
The driver assistant system can be considered as a
sensor for activation of recommendation services in
the cloud that analyses the current situation and
provides the driver with recommendations to enhance
the driving process (see, Smirnov A. et al., 2014).
If the driver assistant system recognizes that the
driver is in a dangerous state, it tries to make alerts or
recommendations to prevent an accident. E.g., lets
imagine that the driver is tired and the system has
determined that he/she is in a drowsiness dangerous
situation. First of all, the business logic of the mobile
application makes alerts for the driver through the
Smartphone
Rear camera
Front camera
Mobile Application
Camera Switcher
Business Logic
User Interface
Computer Vision
Analysis Module
Computation
Planner
Vehicle
Ontology
Driver
Ontology
Local Database
Cloud
Behavior Patterns
Driver Style Patterns
Dangerous Events
Application Usage
Statistics
Vehicle
infotainment system
Current Location
Current Speed
Fuel Level In Vehicle Screen
Text to Speech Road Signs
Audio System
Steering Wheel
Vibration
Information Services
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
106

vehicle infotainment system. If the dangerous state
appears few times, the system decides to use a
recommendation service in the cloud that makes
context-based recommendations. E.g., service can
propose to stop and drink a cup of coffee at a gas
station in 5 km or stay in a hotel in 10 km.
3.2 Dangerous Events Identification
We focus at five most commonly occurring
dangerous driving events: drowsiness, distraction
(e.g., when the driver is distracted and takes his/her
eyes off the road), tailgating (i.e., getting too close to
the followed car in front), lane weaving or drifting
and careless lane change. Figure 3 presents dangerous
events identification diagram.
Drowsiness. As a starting point, the smartphone’s
front camera should be able to monitor the head
position, facial expressions and the prolonged and
frequent blinks indicating micro sleep. We adopt a
standard metric for measuring alertness, PERcentage
of CLOSure of the eyelid – called PERCLOS, which
more formally represents the proportion of time
within one minute that eyes are at least 80% closed.
This driver state information such as PERCLOS and
eye-blink speed is provided by the front-facing
camera. We continuously compute PERCLOS and
declare the driver as “drowsy” if PERCLOS exceeds
a threshold (e.g., 28%). Another parameter is the
speed of blinking giving the permissible range of 0.5-
0.8 seconds per blink. One more indicator of
drowsiness is yawning. If the driver makes more than
3 yawns in 30 minutes we consider the driver is in this
dangerous state. Finally, the fourth indicator of this
dangerous event is the head nodding. If the number of
head nods exceeds a threshold (e.g., 4 in 2 minutes),
the drowsiness is inferred.
Distraction. Two types of inattentive driving are
monitored. In the first case, the output of the face
direction classifier based on head movements and
head position is tracked. If the driver’s face is not
facing forward for longer than 3 seconds while the car
is moving forward (i.e., while aт acceleration is
reported by the accelerometer) and not turning as
reported by the turn detector (which is based on the
gyroscope readings) then a dangerous driving event is
inferred. In the second case, we monitor the turn
detector. We recognize four face related categories
that include: (1) no face is present; or the driver’s face
is either (2) facing forwards, towards the road; (3)
facing to the left events (i.e., a 15
○
or more rotation
relative to facing directly forwards); and, (4) facing to
the right events (another 15
○
or more rotation, but this
time to the right). Each time a turn is detected, the
historical output of the face direction classifier is
checked. If there is no a head turn corresponding to
the car turning event then the driver did not check that
the road is clear before turning – as a result, a
dangerous event is inferred.
Tailgating. We adopt the calculation for a
minimum following distance, which relies on the
speed estimation and the recognition of the followed
vehicles. A “safe following distance” is a distance,
when the driver stays at least 2 seconds behind any
vehicle that is directly in front of the driver's vehicle.
If we determine the safe following distance is not
respected for a period longer than 3 seconds a
dangerous driving event is inferred.
Lane Weaving and Drifting. Detecting lane
weaving or drifting relies on the trajectory classifier
based on the lane markers and lane position of the
driver’s car. If the classifier infers either lane weaving
or lane drifting continuously for longer than 2
seconds, which would be significantly longer than the
typical duration of a lane change manoeuvre, we
report a dangerous driving event.
Careless Lane Change. Each time the trajectory
classifier determines a lane change event the recent
inferences made by face direction classification are
examined. If there is no a head turn corresponding to
the lane change event and the duration of mirror
checks is less than 3 seconds, occurring prior to the
lane change event detection, than a dangerous driving
event is inferred.
3.3 Implementation
3.3.1 Driver Face Recognition
The proposed ADAS system has been implemented
for Android-based mobile devices. The driver and
vehicle classification pipelines, which represent the
most computationally demanding modules, are
written in C and C++ based on the open source
computer vision library (OpenCV library) (see,
Figure 4) and interfaced with Java using JNI
wrappers. Currently, using the front-facing camera,
our mobile application is able to recognize two
dangerous events, drowsiness and distraction. Other
architectural components (dangerous driving event
engine, context-driven camera switching, and multi-
core computation planner) are implemented using
pure Java. For the image recognition based on
OpenCV library the Haar cascade classifier is called
to find faces or eyes at each frame received in video
sequence. It returns a vector of rectangles where each
rectangle contains the detected object. Each rectangle
is presented by OpenCV Rect structure (see Table 1).
Driver Assistant in Automotive Socio-cyberphysical System - Reference Model and Case Study
107
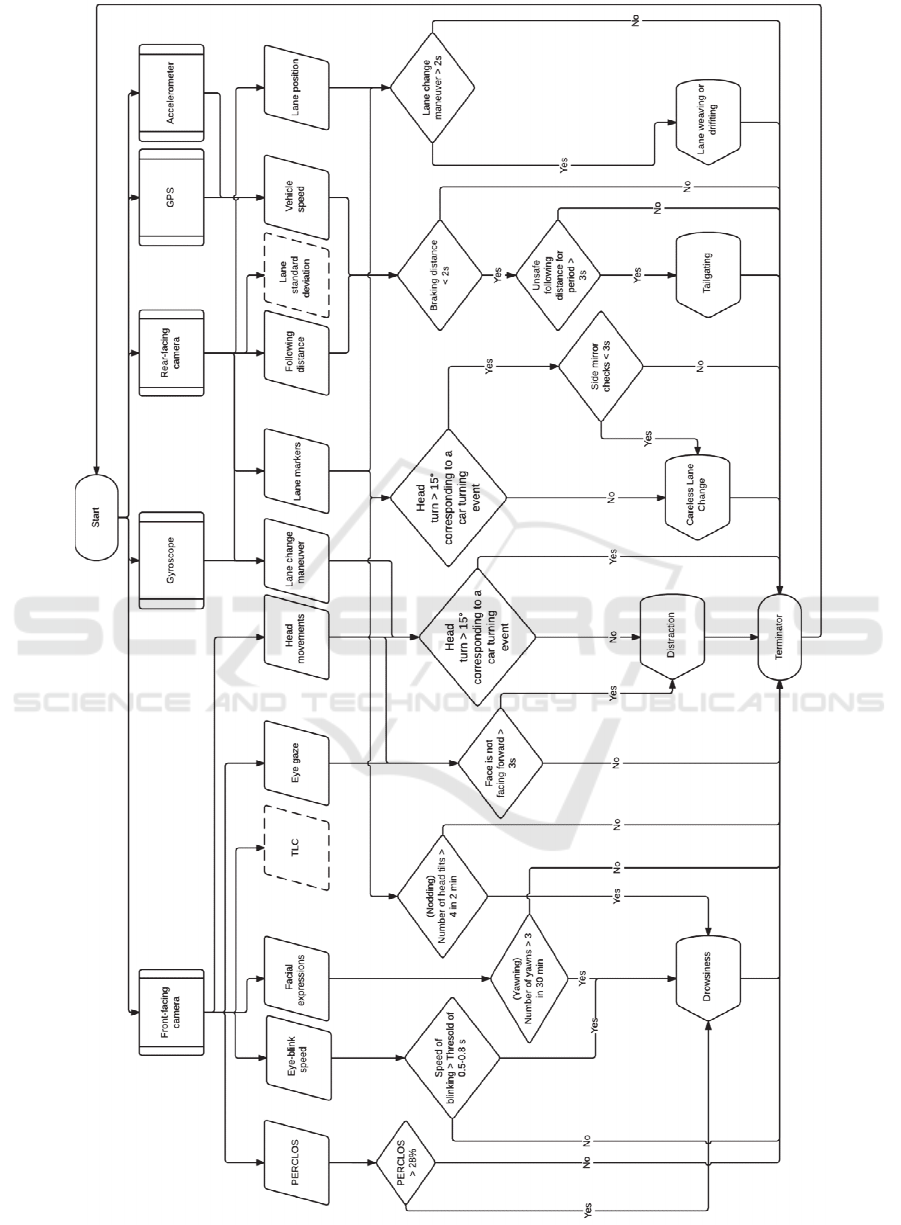
Figure 3: Dangerous Events Identification Diagram.
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
108
Table 1: OpenCV output data of face and eyes recognition.
Face Left eye Right eye T
i
m
e
X Y W H X Y W H X Y W H
2
4
3
1
0
8
3
7
2
3
7
2
4
2
9
1
9
0
1
6
3
1
2
4
2
6
6
1
9
0
1
6
3
1
2
4
1
1
9
2
4
3
1
0
8
3
7
2
3
7
2
4
2
9
1
9
0
1
6
3
1
2
4
2
6
6
1
9
0
1
6
3
1
2
4
6
0
2
4
3
1
0
8
3
7
2
3
7
2
4
2
9
1
9
0
1
6
3
1
2
4
2
6
6
1
9
0
1
6
3
1
2
4
5
9
The image processing module has input/output
signals that allows to transmit the image taken with
the camera, receive appropriate driver
recommendations. Both driver and vehicle ontologies
are involved in the work of the computer vision
module and the analysis module. At first, camera
image (Bitmap) is scanned to find and identify objects
and their position that are relevant to the situation. In
the next step, vectors of rectangles that contain the
detected objects are passed to the Analysis module for
further processing. With the help of predefined rules
that cover unsafe situations and scenarios, it runs
search-match calculation. If the Analysis module
returns true, the system makes an appropriate alert,
otherwise this event is ignored. For example, if the
system determines that the driver is likely to enter a
dangerous drowsy state, it makes an audible alert for
a driver. Quantitative parameters helping to identify
dangerous driving events are presented as follows.
PERCLOS. Regarding PERCLOS, we consider,
for each driver, the proportion of time within one
minute that eyes are at least 80% closed. The
permissible limit is equal to 30%.
Eye-blink Rate. We compute for each driver the
eye-blink rate as the average number of blinks per
minute (the range from 8 to 21 blinks per minute).
Face Direction. We classify the direction of the
driver’s face and recognize four face related
categories that include: (1) no face is present; or
the driver’s face is either; (2) facing forwards,
towards the road; (3) facing to the left, if the angle
is greater than 15
◦
relative to facing directly
forwards; (4) facing to the right, if the angle is
greater that 15
◦
, but this time to the right.
To find a face in the image the built-in
“FaceDetector” class is used. We create a face
detector, which is optimized for tracking a single,
relatively large face. Additionally, a
“LargestFaceFocusingProcessor” face processor is
applied that focuses on tracking a single “prominent
face” in conjunction with the associated
FaceDetector. A prominent face is defined as a face,
which was initially the largest, most central face when
tracking began. This face will continue to be tracked
as the prominent face for as long as it is visible, even
when it is not the largest face. As an optimization,
once the prominent face has been identified, the
associated detector is instructed to track only that
face. This makes face tracking faster.
Determined visual parameters of the face is used
to infer drowsiness, distraction and fatigue states. We
use a rule-based approach to evaluate presented
reference model. We compose our dangerous events
as a collection of simpler events based on IF / THEN
rules that provide an outcome. We have defined five
rules that provide an output score. They are defined
as follows:
If PECLOS parameter exceeds the threshold of
30%, the system declares the driver “drowsy”.
If the driver is not facing forward for longer than
three seconds while the car is moving forward, a
dangerous driving event is inferred.
If there is no a head turn corresponding to a car
turning event, than the driver did not check that the
road is clear before turning – as a result, a
dangerous event is inferred.
If appropriate mirror checks are not performed
before lane change event, than the driver did not
check blind spots before proceeding – as a result,
a dangerous event is inferred.
If the eye-blink rate of the driver doesn’t
correspond to the above-mentioned range, then
dangerous event is determined.
There exist other rules that have not been
considered in this paper. Built rules are the result of
combining quantitative parameters and ontologies.
Detection Classification. Inferring the direction
of the driver’s face is divided into two steps: (1)
detection classification and (2) direction
classification. Images from the front camera are
scanned to find the relative position of the driver’s
face. The overall image is provided to the classifier
that determines if a face is present, and if so the face
direction is classified.
Facial Features. Facial analysis includes a
number of processing steps that attempt to detect or
track the face, to locate characteristics of facial
regions such as eyes, pupils if speaking more
precisely, and nose, to extract and follow the
movement of facial features, such as characteristic
points in these regions or model facial gestures using
anatomic information.
Driver Assistant in Automotive Socio-cyberphysical System - Reference Model and Case Study
109
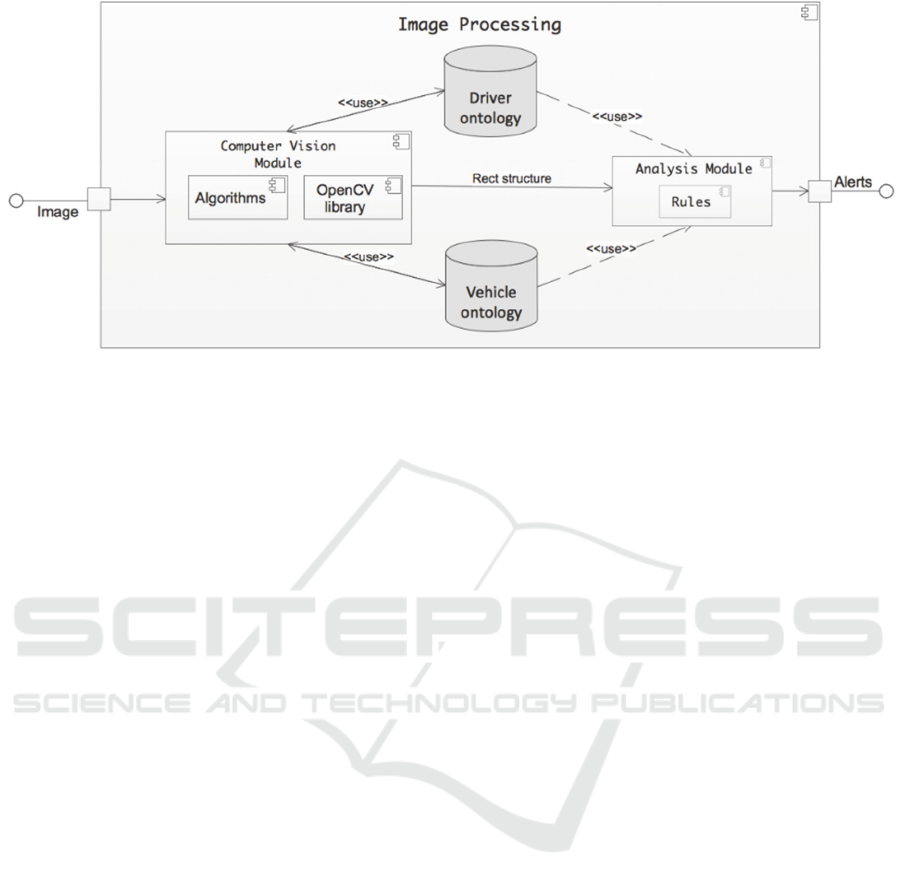
Figure 4: Image processing module implementation.
Drowsy State. Drowsy driving, a combination of
sleepiness and driving, has become a worldwide
problem that often leads to tragic accidents and
outcomes. The smartphone’s front camera should be
able to monitor the prolonged and frequent blinks
indicative of micro sleep. Existing research findings
have shown that the percentage of closure of eyelid
(a.k.a PERCLOS) is an effective indicator to evaluate
the driver’s drowsiness. A measure of drowsiness,
PERCLOS, was generated and associated with
degradation in driving performance in a simulated
roadway environment.
Although PERCLOS is considered the best
among other indicators in drowsiness detection, the
original PERCLOS is not suitable for smart phones,
since smart phones could not analyse every frame
accurately or effectively. However, in an analogy to
PERCLOS, we can detect fatigue by analysing a
series of states of eyes, classified by a neural network
to either open or closed. The states of eyes are
necessary to simulate not only PERCLOS, but also
the frequency of wink and the time of continuous
closing eyes, which are all used in the driver alert
mechanism. The faster we can acquire image of eyes
and do the analysis, the less error between simulation
and reality of the indicators will be.
Distraction State. By using the front camera of the
phone, the head position of the driver can be used to
determine an inattentive driving behaviour when the
driver is not looking at the road ahead.
Two types of inattentive driving are monitored by
our approach. In the first case, the output of the face
direction classifier is tracked. If the driver’s face is
not facing forward for longer than three seconds
(Breakthrough Research) while the vehicle is moving
forward (i.e., while a positive speed is reported by the
available smartphone sensors) and not turning as
reported by the turn detector (also reported by car
classification pipeline) then a dangerous driving
event is inferred. However, that it’s not a constant
value and this parameter depends on various factors
(e.g. vehicle speed, acceleration). In the second case,
we monitor the turn detector. Each time a turn is
detected the historical output of the face direction
classifier is checked. If there is no a head turn
corresponding to a car turning event then the driver
did not check that the road is clear before turning – as
a result, a dangerous event is inferred.
Persons’s Gaze. The direction of a person’s gaze
is determined by two factors: face orientation (face
pose) and eye orientation (eye gaze). Face pose
determines the global direction of the gaze, while eye
gaze determines the local direction of the gaze.
Global gaze and local gaze together determine the
final gaze of the person. According to these two
aspects of gaze information, video-based gaze
estimation approaches can be divided into a head-
based approach, an ocular-based approach, and a
combined head- and eye-based approach.
3.3.2 Integration with Ford Sync
To develop a vehicle module, the Android AppLink
emulator v2.3 (AppLink emulator, 2015) and
SyncProxy SDK (SyncProxy SDK, 2015) v.1.6.1
have been used. Figure 5 shows an example of alert
visualisation on Ford SYNC system. For the alerts
visualisation the following interfaces have been used:
show information in the car screen (function
proxy.show()) and text to speech function for
providing audio information of recommended actions
(function proxy.speak()).
Using in-vehicle system through Bluetooth
network increases the mobile device power
VEHITS 2016 - International Conference on Vehicle Technology and Intelligent Transport Systems
110

consumption but it does not matter because car
drivers usually have mobile device chargers.
Figure 5: Example of Smartphone ADAS system
integration with Ford Sync.
4 CONCLUSIONS AND FUTURE
WORK
The paper presents a reference model of socio-
cyberphysical system for driver assistance in the
vehicle. The reference model is based on the driver,
smartphone, vehicle infotainment system, and cloud.
For identification of dangerous events based on
information from smartphone cameras and vehicle
sensors, the special diagram has been proposed. The
case study shows the process of driver face analysis
results visualisation in the vehicle screen. For future
work, we are planning to use Amazon AWS IoT
platform for the cloud service implementation.
ACKNOWLEDGEMENTS
The presented results are part of the research carried
out within the project funded by grants # 16-07-
00462, # 14-07-00345, # 15-07-08092, # 15-07-
08391 of the Russian Foundation for Basic Research,
and programs # I.5 and # III.3 of the Russian
Academy of Sciences. The work has been partially
financially supported by Government of Russian
Federation, Grant 074-U01.
REFERENCES
AppLink emulator, 2015, https://developer.ford.com/
content/restricted/ALE_Win7_2.3_20140414.zip.
Aurichta, M., Stark, R., 2014, How to Consider Emotional
Reactions of the Driver within the Development of
Advanced Driver Assistance Systems (ADAS)?,
Procedia CIRP, Vol. 21, pp. 70–74.
Bergasa, L., Almería, D., Almazán, J., Yebes, J., Arroyo,
R., 2014, DriveSafe: an App for Alerting Inattentive
Drivers and Scoring Driving Behaviors”, In
Proceedings of IEEE Intelligent Vehicles Symposium,
Dearborn, MI, USA.
Biondi, F., Rossi, R., Gastaldi, M., Mulatti, C., 2014,
Beeping ADAS: Reflexive Effect on Drivers’ Behavior,
Transportation Research Part F, Vol. 25, pp. 27–33.
Breakthrough Research on Real-World Driver Behavior,
2015, http://www.nhtsa.gov/Driving+Safety/Dis trac
ted+Driving+at+Distraction.gov/Breakthrough+Resear
ch+on+Real-World+Driver+Behavior+Released.
Lashkov, I. Smirnov, A., Kashevnik, A., Parfenov, V.,
2015, Ontology-Based Approach and Implementation
of ADAS System for Mobile Device Use While
Driving, 6
th
International Conference on Knowledge
Engineering and Semantic Web (KESW 2015),
Moskov, Russia, pp. 117-131.
OpenCV library, http://opencv.org, 2015.
Smirnov, A., Kashevnik, A., Shilov, N., Gusikhin, O.,
2014, Context-Driven On-Board Information Support:
Smart Space-Based Architecture, The 6th International
Congress on Ultra Modern Telecommunications and
Control Systems (ICUMT 2014), IEEE, St.Petersburg,
Russia, pp. 195-200.
Smirnov, A. and Lashkov, I., 2015, State-of-the-Art
Analysis of Available Advanced Driver Assistance
Systems, Proceedings of the 17th Conference of the
Open Innovations Association FRUCT, Yaroslavl,
Russia, pp. 345-349.
Wang, T., Cardone, G., Corradi, A., Torresani, L.,
Campbell, A., 2012, WalkSafe: A Pedestrian Safety
App for Mobile Phone Users Who Walk and Talk
While Crossing Roads, in Proceedings of
HotMobile’13, Article No. 5.
You, C., Lane, N., Chen, F., Wang, R., Chen, Z., Bao, T.,
Montes-de-Oca, M., Cheng, Y., Lin, M., Torresani, L.,
Campbell, A., 2013, CarSafe App: Alerting Drowsy
and Distracted Drivers using Dual Cameras on
Smartphones, in Proceedings of MobiSys’13, pp. 461-
462.
SyncProxy SDK, 2015, https://developer.ford.com/
content/ restricted/SyncProxy_1.6.1_Android.zip.
Driver Assistant in Automotive Socio-cyberphysical System - Reference Model and Case Study
111
