Identifying Landmark Cues with LIDAR Laser Scanner Data Taken
from Multiple Viewpoints
Andrzej Bieszczad
California State University Channel Islands, One University Drive, Camarillo, CA 93012, U.S.A.
Keywords: Robot, Navigation, Localization, Cue Identification, Neural Networks, Support Vector Machines,
Classification, Pattern Recognition.
Abstract: In this paper, we report on our ongoing efforts to build a cue identifier for mobile robot navigation using a
simple one-plane LIDAR laser scanner and machine learning techniques. We used simulated scans of
environmental cues to which we applied various levels of Gaussian distortion to test a number of models the
effectiveness of training and the response to noise in input data. We concluded that in contrast to back
propagation neural networks, SVM-based models are very well suited for classifying cues, even with
substantial Gaussian noise, while still preserving efficiency of training even with relatively large data sets.
Unfortunately, models trained with data representing just one stationary point of view of a cue are inaccurate
when tested on data representing different points of view of the cue. Although the models are resilient to noisy
data coming from the vicinity of the original point of view used in training, data that originates in a point of
view shifted forward or backward (as would be the case with a mobile robot) proved much more difficult to
classify correctly. In the research reported here, we used an expanded set of synthetic training data
representing three view points corresponding to three positions in robot movement in relation to the location
of the cues. We show that by using the expanded data the accuracy of cue classification is dramatically
increased for test data coming from any of the points.
1 INTRODUCTION
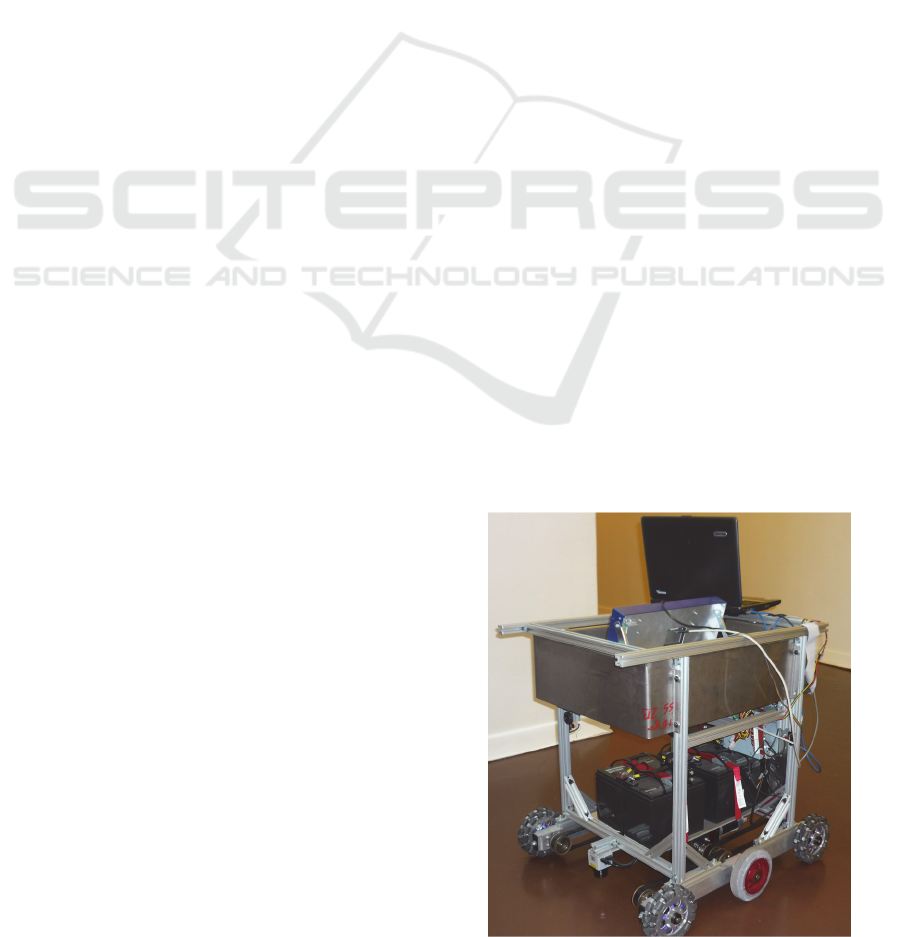
Automated Intelligent Delivery Robot (AIDer; shown
in Figure 1) is a mobile robot platform for exploring
autonomous intramural office delivery (Hilde et al.,
2009; Rodrigues et al., 2009). The research reported
in this paper was part of the overall effort to explore
ways to deliver such functionality. The robot was to
navigate in a known environment (a map of the
facility is one of the elements of AIDer’s
configuration) and carry out tasks that were requested
by the users through a Web-based application. Each
request included the location of a load that was to be
moved to another place that was also specified in the
request. The pairs of start and target locations were
entered into a queue that was managed by a path
planning module. When the next job from the queue
was selected, the robot was directed first to the start
location where it was to get loaded after announcing
itself, and then to the destination where it was to get
unloaded after announcing its arrival. That routine
was to be repeated indefinitely — if there were other
requests waiting in the queue and as long as there was
power.
Figure 1: Robot with a laser scanner (between the front
wheels).
78
Bieszczad A..
Identifying Landmark Cues with LIDAR Laser Scanner Data Taken from Multiple Viewpoints.
DOI: 10.5220/0005508000780085
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 78-85
ISBN: 978-989-758-122-9
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
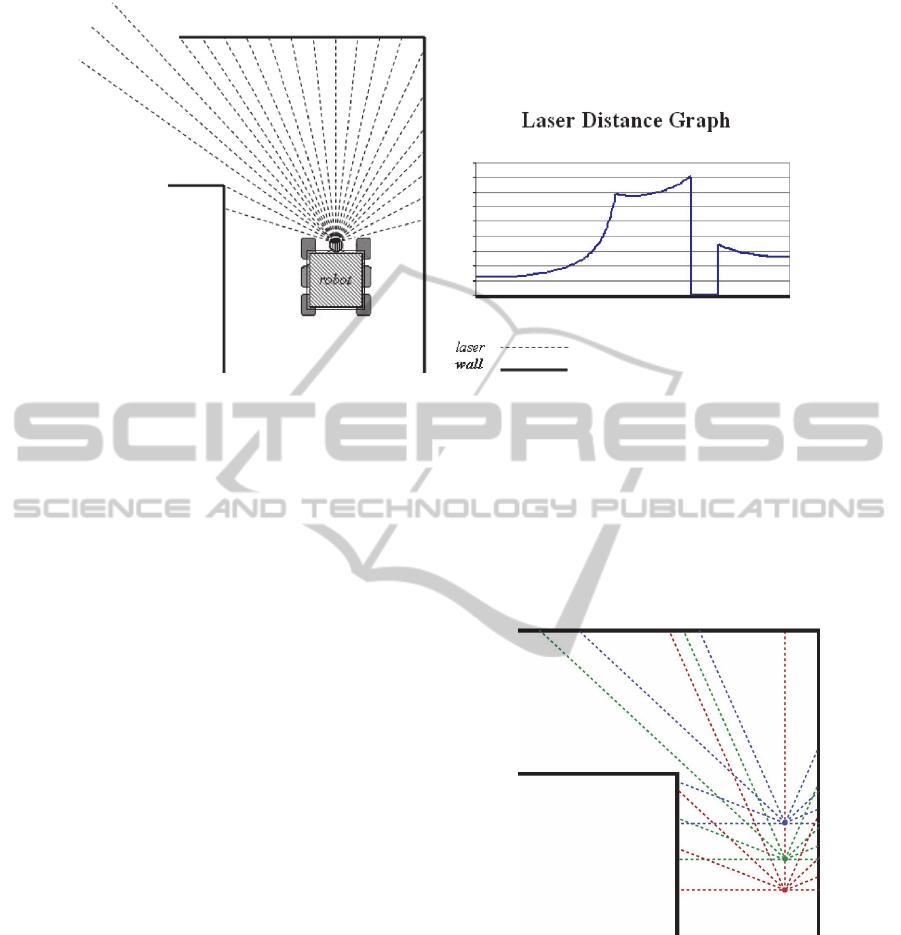
Figure 2: Robot LIDAR scan and the corresponding graph.
One of the major objectives was to provide the
functionality at low cost. Therefore, AIDer has a very
limited set of sensors for navigation: right side
detectors of the distance from the wall, and a frontal
2D (one-plane) LIDAR laser scanner for detecting
cues such as turns and intersections. The side sensors
are used to provide a real-time feedback to a
controller that corrects the position of the robot so it
stays at a constant distance from the right wall (Hilde
et al., 2007).
Higher-level navigation in AIDer is based on
following paths that consist of a series of intervals
between landmarks (Rodrigues et al., 2009). A map
of the facility is provided as an element of the
configuration (using a custom notation), so the robot
is not tasked with mapping the environment. The map
configuration file includes locations of landmarks
along with exact distances between the landmarks.
Upon receiving the next task to carry out, the robot
determines the path to travel in terms of the
landmarks. The path is divided into a sequence of
landmarks, and the robot is successively directed to
move to the next landmark. After the current target
landmark is identified, the robot receives the next
target landmark to go to. To accommodate for error
in mobility (like slippage of the wheels) that may
skew the robot orientation based purely on traveling
exact distances, the robot relies on identification of
cues to verify reaching landmarks.
In an environment lacking GPS, identification of
environmental cues is a critical low-level task
necessary for recognizing landmarks (Thrun, 1998),
since landmarks are defined in terms of cues. The
frontal laser-scanner in AIDer serves that purpose.
Each scan produces a sequence of measurements that
differ depending on the shape of the surrounding
walls. For example, Figure 2 shows a scan of a left
turn. The scan results - a sequence of numbers
representing the measured distance (e.g., in inches) -
are graphed using angles on the x axis and the
distances on the y axis. Due to the range limitations
of the laser scanner, certain measurement may be read
as zeros; that is visible as a sudden drop in the curve
shown in the figure.
Figure 3: Multipoint view of a cue “left turn”. Only 9
measurements from each viewpoint shown here for clarity.
In (Hilde et al., 2007), an approach similar to
(Hinkel et al, 1988) was taken with a selective subset
of measurements used to define cues analytically with
a limited success.
In this paper, the complete raw set is used for this
purpose as will be shortly explained. Our earlier
attempts to use raw data in such a way were not
completely successful (Henderson, 2012), and the
research reported here remedies that.
IdentifyingLandmarkCueswithLIDARLaserScannerDataTakenfromMultipleViewpoints
79
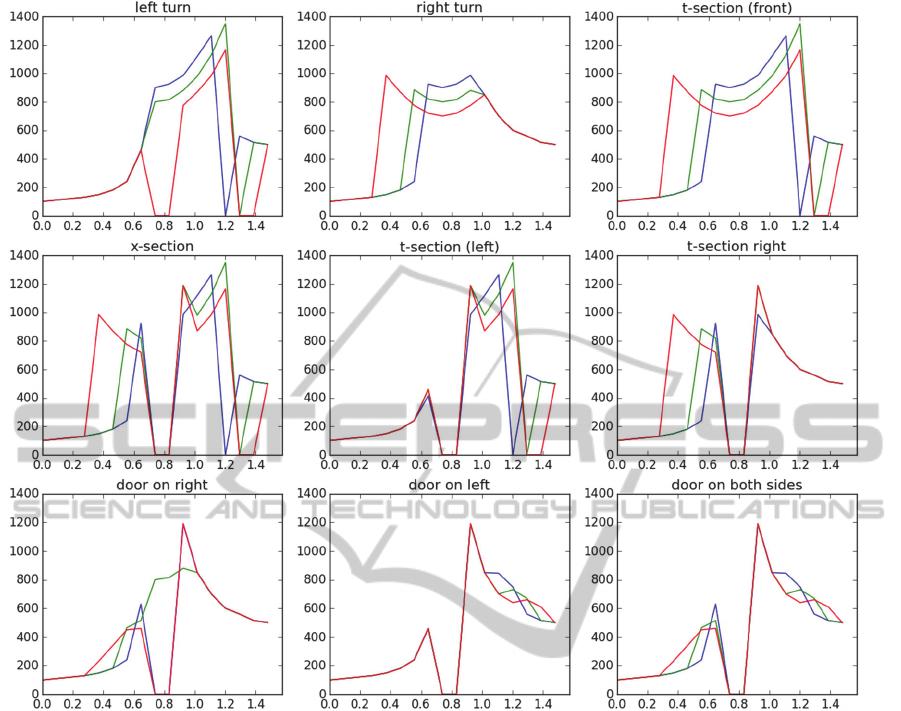
Figure 4: Three curves corresponding to three points of view for each of the nine cues. The y axis shows LIDAR measurements
given in inches, and the x axis shows progression of the angle for each successive measurement.
2 RELATED WORK
Mapping and localization services are the foundation
of autonomous navigation (Thrun, 1998). As we
already stated, mapping is not a functional objective
of the AIDer. Vast majority of the current localization
work is based on utilization of very sophisticated
equipment as seen in cars participating in R&D
efforts in academia, auto industry, and government-
sponsored contests (e.g., Leonard et al., 2008).
Utilizing simple sensors with very limited capabilities
started the field (Borenstein, 1997), but currently it’s
rare to depend on just such limited functionality. Yet,
the use of inexpensive devices is important in
environments lacking access to powerful computers
or abundant power supplies (e.g., Roman et al., 2007),
and when cost is a concern (e.g., Tan et al., 2010).
LIDAR-based identification was successfully
solved by analytical methods in (Hinkel et al, 1988)
in which histograms of laser measurements were used
as the input data. There have been numerous attempts
to use similar data using a variety of analytical
approaches (e.g., Zhang et al., 2000; Shu et al., 2013;
Kubota et al., 2007; Nunez et al., 2006).
(Vilasis-Cardona et al., 2002) used cellular neural
networks to classify cues, but the localization was
based on processing 2D images of vertical and
horizontal lines placed on the floor rather then 1D
LIDAR measurements. Just like in (Henderson,
2012), histogram data were used as inputs to
backpropagation neural network in research reported
in (Harb et al., 2010), but the authors did not specify
the details of the back propagation algorithm that they
used. In (Bieszczad, 2015), we follow that sub
symbolic approach studying the capabilities of back
propagation models and contrasting them with
training based on support vector machines (SVM).
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
80
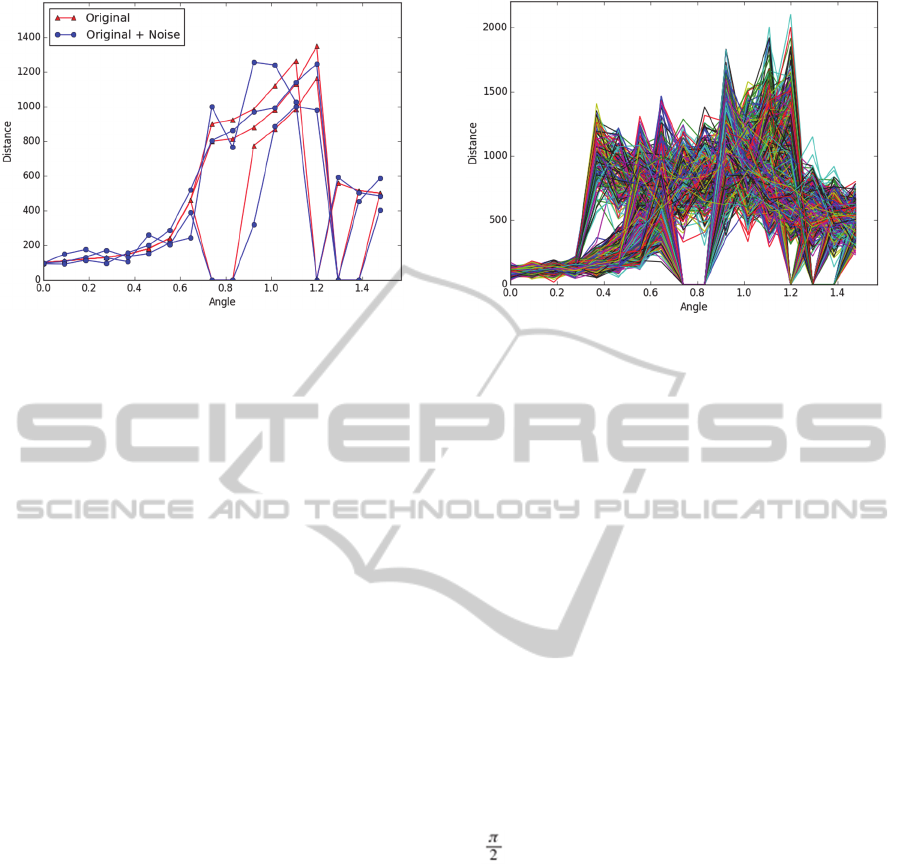
Figure 5: Three cue curves corresponding to three different
points of view of the cue lt along with their distorted
versions obtained by applying Gaussian noise
= 0.2. All of these curves must classify as lt.
3 CUE DATA SETS
3.1 Single-point View
The laser mounted on AIDer is capable of scanning
180o with a granularity yielding 512 measurements
per scan. Such a high-dimension space would be
inconvenient for exploration of the techniques, so in
(Bieszczad, 2015) we handcrafted a smaller,
17dimensional, synthetic data set for a miniaturized
virtual model that otherwise preserved the geometry
of the office environment and the nature of the
problem. Our results reported in (Bieszczad, 2015)
indicated that good models can be built with both
back-propagation neural networks applying
Broyden–Fletcher–Goldfarb–Shannon (BFGS)
optimization augmented with regularization, and with
Support Vector Machines (SVM) assuming that data
shaping took place with a normalization followed by
Principal Component Analysis (PCA). Neural
networks using another optimization approaches
were not as successful frequently failing to converge
and yielding large errors.
Unfortunately, we also showed that expanding
data dimension thirty-fold, from 17 back to the
original 512-dimensional space was not handled well
by the models built using neural network techniques.
Training was failing or taking too long to converge on
a relatively fast platform that we had available for the
experiments (see TABLE 1 and 2).
In contrast to the models built with neural
networks, SVM models overcame the challenges and
scaled up very well preserving the effectiveness of
training and the accuracy of classification.
Figure 6: One thousand curves representing randomly
generated cues with applied noise with = 0.2.
3.2 Multi-point View
In the research reported in this paper, we use the same
approach, namely training an SVM (Bieszczad,
2015), but with the original problem expanded from
identifying a cue from a single point of view to
identifying cues from multiple, namely three, points
of view.
Following the same illustrative approach shown
in Figure 2, if we take LIDAR snapshots from three
points as shown in Figure 3, then we obtain three
model curves for each of the original nine cues: lt (left
turn), rt (right turn), ts (t-section/front), xs (x-section),
tl (left t-section), tr (right t-section), dr (door on
right), dl (door on left), and d2 (door on both sides).
In this miniaturized model (rather than the original
model with 512 dimensions) every (simulated) scan
is a sequence of distance measurements made with
the laser angle progressing in 17 steps in the interval
[0, ]. All curves are shown in Figure 4.
As in the earlier experiments we apply Gaussian
noise to all curves for training and for testing. Figure
5 illustrates the level of distortion of three curves
corresponding to the cue lt caused by applying noise
with a standard deviation =0.2. Both the
normalization and the PCA transforms are built using
only the training data, and then applied to test data.
The data present a very challenging task for
classifiers as illustrated in Figure 6; the curves
representing the cues are similar in many respects.
The PCA analysis of the cue data shows that although
the clusters are noticeable, they are overlapping as
shown in Figure 7.
We attempted to apply dimension reduction using
PCA, but that led to increased error rates; especially
with larger noise. Indeed, even with the low
dimensional cue data a closer examination of the
IdentifyingLandmarkCueswithLIDARLaserScannerDataTakenfromMultipleViewpoints
81
principal components revealed that most of the
dimensions were actually significant as shown by
computing the variance ratios:
[ 0.27065951 0.19814385 0.13178777
0.05885712 0.04639313 0.03896735
0.03728837 0.03559292 0.03151982
0.02958179 0.02692341 0.0266508
0.02205014 0.02059795 0.01286112
0.00689689 0.00522805]
4 RESULTS
4.1 Testing One-viewpoint Model
Our first fundamental question was if the model
trained with data generated from one point of view
(the midpoint in Figure 3) can identify same cues as
perceived from different points of view (backward
and forward; shifted by a delta that is the same as the
distance from the wall in our data set). We generated
training samples just like we did in (Bieszczad, 2015):
we applied Gaussian noise to distort the curves
corresponding to cues taken from the midpoint to
generate ten thousand samples. An SVM model built
promptly on our computing platform, so we could test
a number of variants. However, unlike in (Bieszczad,
2015) this time around we generated test sets from
curves corresponding to measurements taken from all
three (rather than just one) points.
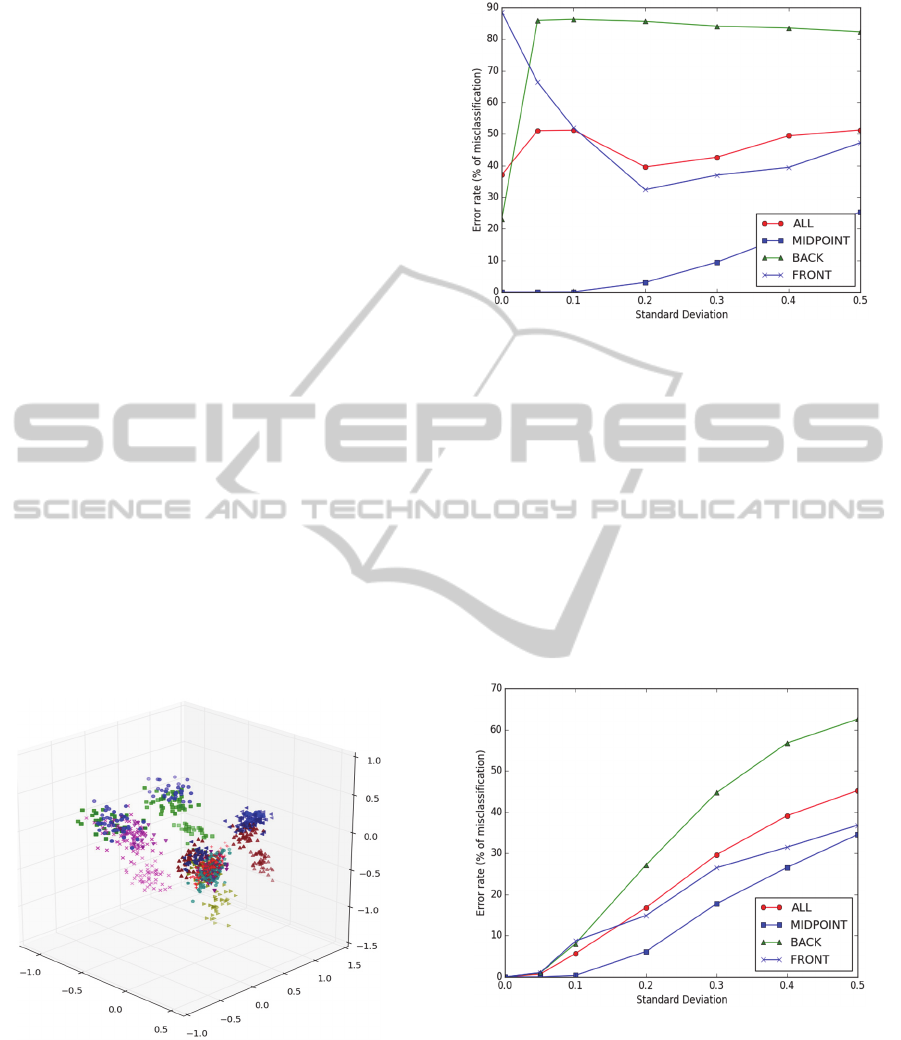
Figure 7: Clusters obtained with the principal component
analysis applied to one thousand curves representing
randomly generated cues with applied noise with = 0.2.
Please note that for drawing in 3D only the first three
principal components are used. Although the clusters are
overlapping in 3D, they are much better separated in higher
dimensions.
Figure 8: Performance of the SVM model created using a
training set generated from cue curves taken from a single
point of view, but test against test sets created from all and
from each individual point of view.
We applied random noise to randomly selected
ten thousand of test samples and then tested the set
against a number of models built with different levels
of distortion (i.e., noise). As shown in Figure 8, the
model preserves the accuracy of the curves
concentrated around the viewpoint used for
generating training set, but fails badly for curves that
represent cues from different point of views. It also
performs poorly if the test set is constructed randomly
using cue scans taken from all points of view.
Figure 9: Performance of the SVM model created using a
training set generated from cue curves taken from a
multiple points of view, and tested against test sets created
from all and from each individual point of view.
4.2 Testing Multi-view Model
In an attempt to find a remedy, we created a model
using our extended data set generated as described
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
82
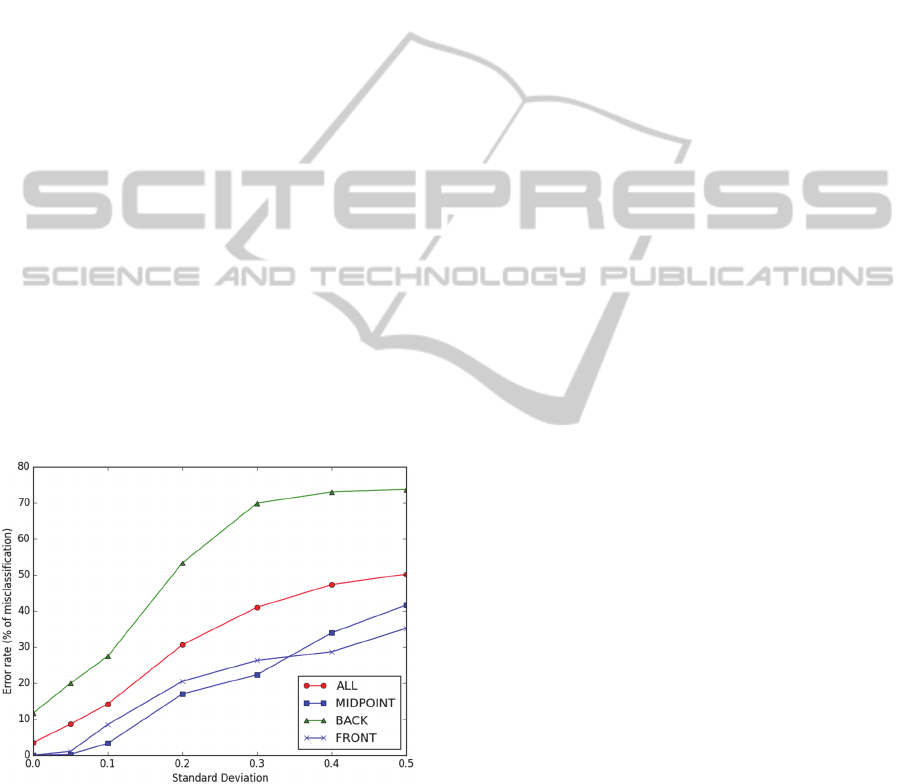
earlier from three different points of view. We tested
the model in the same way as the former.
The results can be seen in Figure 9. Comparing
the graphs with the ones drawn in Figure 8 shows that
the new model performs dramatically better on all test
data sets although not as well as the single-point
model performed with the test data taken from the
same single point of view that was used for training.
Still, the identification of cues scanned from the mid-
point is very close to the one shown in Figure 8,
although the impact of high-level of distortion on the
error rate is stronger. As before, the scans from the
back point of view are most difficult to identify, but
evidently moving the robot forward is less of the
problem in this particular environment.
5 CONCLUSIONS
We showed that the cue identification model first
presented in (Henderson, 2012) and (Bieszczad,
2015) can be improved by extending the training set
to data collected from multiple points of view. Such a
model will be more accurate for the robot in motion.
Therefore, the need to pinpoint exactly the location
most appropriate to take a scan for identification is
somewhat relaxed. Instead of a single point of
opportunity, now the robot has a window of
opportunity to identify cues.
Figure 10: Performance of the SVM model created using
data with dimension reduced to three principal components.
We tried to reduce the dimension of the data used
in our experiments by trimming them down to just
three principal components. Unfortunately, as in our
earlier experiments we did end up with models that
were performing substantially worse than the models
preserving the original dimensionality of data as
illustrated by the results shown in Figure 10.
These results indicate that a machine learning
approach is a viable alternative to analytical methods
originating in (Hinkel et al., 1998), although more
experiments are needed that will test the method with
a higher granularity of robot movements (e.g.,
continuous movement) and well as robot orientation.
6 FUTURE DIRECTIONS
Using a physical machine for numerous experiments
is inconvenient and inefficient, so we are planning to
build a simulator with which it would be easier to test
our models. Such a simulator will also help us in
using a better granularity for multiple view points.
Instead of just three points, we will be able to select a
range of robot displacements (up to continuous) and
work with scans from within that range. The
capability to generate such improved data sets will be
useful in both testing our current models and in
building potentially improved models.
One important problem set aside in this paper is
the fact that cues often are present together at the
same time, so scans may include data for multiple
cues. In the current approach, such a complex super-
cue is just another cue. However, decomposing
complex cues may be a viable alternative; especially
in a more diversified environment and if a 360°
scanner is used — as we plan. We plan to use data
sets that mix cues to some degree to test the
identification capabilities of the models trained under
such circumstances. One idea to deal with this
problem — if it arises — is to extract individual cues
from curves. Such attempts have been made by some
researchers in the papers listed in the references (e.g.,
Vilasis-Cardona, 2002), and in more complex
approaches to the localization problem (e.g., through
feature extraction using image processing
techniques).
A difficult problem to overcome is the issue of
accuracy of laser scans when dealing with light
conditions and various materials from which
obstacles are made. These issues are of paramount
importance in outdoor navigation in an unknown
terrain as described in (Roman et al., 2007) and
elsewhere. To explore possible solutions — and in
general to test in in the physical world the ideas
explored with the simulator — we are in a process of
building a smaller robot similar to AIDer that is both
more convenient to use, and substantially less
expensive.
Another venue that we are planning to explore is
acquiring goal-oriented behavior based on our earlier
work on Neurosolver (Bieszczad, 1996).
IdentifyingLandmarkCueswithLIDARLaserScannerDataTakenfromMultipleViewpoints
83
Table 1: Software Environment.
Software Version
Python
3.4.2 64bit [GCC 4.2.1 Compatible Apple
LLVM 6.0 (clang-600.0.54)]
IPython 2.3.1
OS Darwin 14.1.0 x86_64 i386 64bit
numpy 1.9.1
scipy 0.15.1
matplotlib 1.4.2
sklearn 0.15.2
neurolab 0.3.5
Table 2: Hardware Environment.
System iMac Retina 5K, 27-inch, Late 2014
Processor 4 GHz Intel Core 7 (4 cores)
Memory 32 GB 1600 MHz DDR3
ACKNOWLEDGEMENTS
We would like to thank Advanced Motion Control
(AMC), a Camarillo, CA, company that generously
made their AIDer robot available to us.
REFERENCES
Hilde, L., 2009. Control Software for the Autonomous
Interoffice Delivery Robot. Master Thesis, Channel
Islands, California State University, Camarillo, CA.
Rodrigues, D., 2009. Autonomous Interoffice Delivery
Robot (AIDeR) Software Development of the Control
Task. Master Thesis, Channel Island, California State
University, Camarillo, CA.
Thrun, S., 1998. Learning metric-topological maps for
indoor mobile robot navigation. In Artificial
Intelligence, Vol. 99, No. 1, pp. 21-71.
Hinkel, R, and Knieriemen, T., 1988. Environment
Perception with a Laser Radar in a Fast Moving Robot.
In Robot Control 1988 (SYROCO'88): Selected Papers
from the 2nd IFAC Symposium, Karlsruhe, FRG.
Henderson, A. M., 1012. Autonomous Interoffice Delivery
Robot (AIDeR) Environmental Cue Detection. Master
Thesis, Channel Island, California State University,
Camarillo, CA.
Leonard, J., How, J., Teller, S., Berger, M., Campbell, S.,
Fiore, G., Fletcher, L., Frazzoli, E., Huang, A.,
Karaman, S., Koch, O., Kuwata, Y., Moore, D., Olson,
E., Peters, S., Teo, J., Truax, R., Walter, M., Barrett, D.,
Epstein, A., Maheloni, K., Moyer, K., Jones, T.,
Buckley, R., Antone, M., Galejs, R., Krishnamurthy, S.,
and Williams, J., 2008. A Perception-Driven
Autonomous Urban Vehicle. In Journal of Field
Robotics, 1–48.
Borenstein, J., Everett, H.R. , Feng, L., and Wehe, D., 1997,
Mobile Robot Positioning: Sensors and Techniques.
Invited paper for the Journal of Robotic Systems,
Special Issue on Mobile Robots. Vol. 14, No. 4, April
1997, pp. 231-249.
Tan, F., Yang, J., Huang, J., Jia, T., Chen, W. and Wang, J.,
2010. A Navigation System for Family Indoor Monitor
Mobile Robot. In The 2010 IEEE/RSJ International
Conference on Intelligent Robots and Systems, October
18-22, 2010, Taipei, Taiwan.
Roman, M., Miller, D., and White, Z., 2007. Roving Faster
Farther Cheaper. In 6th International Conference on
Field and Service Robotics - FSR 2007, Jul 2007,
Chamonix, France. Springer, 42, Springer Tracts in
Advanced Robotics; Field and Service Robotics.
Vilasis-Cardona, X., Luengo, S., Solsona, J., Maraschini,
A., Apicella, G. and Balsi, M., 2002. Guiding a mobile
robot with cellular neural networks. In
INTERNATIONAL JOURNAL OF CIRCUIT THEORY
AND APPLICATIONS Int. J. Circ. Theor. Appl. 2002;
30:611–624.
Shu, L., Xu, H., and Huang, M., 2013. High-speed and
accurate laser scan matching using classified features”.
In 2013 IEEE International Symposium on Robotic and
Sensors Environments (ROSE), 2013 , Page(s): 61 - 66.
Nunez, P. Vazquez-Martin, R. del Toro, J. C. Bandera, A.
and Sandoval, F., 2006. Feature extraction from laser
scan data based on curvature estimation for mobile
robotics. In Robotics and Automation (ICRA), 2006
IEEE International Conference on. IEEE, 2006, pp.
1167–1172.
Zhang, L. and Ghosh, B. K., 2000. Line segment based map
building and localization using 2d laser rangefinder. In
Robotics and Automation (ICRA), 2000 IEEE
International Conference on Robotics8 Automation,
vol. 3. IEEE, 2000, pp. 2538–2543.
Harbl M., Abielmona, R., Naji, K.,and Petriu, E., 2010.
Neural Networks for Environmental Recognition and
Navigation of a Mobile Robot. In Proceedings of IEEE
International Instrumentation and Measurement
Technology Conference, Victoria, Vancouver Island,
Canada.
Kubota, S., Ando, Y., and Mizukawa, M., 2007. Navigation
of the Autonomous Mobile Robot Using Laser Range
Finder Based on the Non Quantity Map. In
International Conference on Control, Automation and
Systems, COEX, Seoul, Korea.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
84

Bieszczad, A., 2015. Identifying Robot Navigation Cues
with a Simple LIDAR Laser Scanner. Submitted to
International Workshop on Artificial Neural Networks
and Intelligent Information Processing ANNIIP 2015.
Bieszczad, A. and Pagurek, B. (1998), Neurosolver:
Neuromorphic General Problem Solver. In Information
Sciences: An International Journal 105 (1998), pp.
239-277, Elsevier North-Holland, New York, NY.
IdentifyingLandmarkCueswithLIDARLaserScannerDataTakenfromMultipleViewpoints
85
