
The Truck Scheduling Problem at Crossdocking Terminals
Exclusive versus Mixed Mode
L. Berghman
1
, C. Briand
2,3
, R. Leus
4
and P. Lopez
2
1
Universit´e de Toulouse - Toulouse Business School, 20 BD Lascrosses BP 7010, 31068 Toulouse Cedex 7, France
2
CNRS, LAAS, 7 Avenue du Colonel Roche, F-31400 Toulouse, France
3
Universit´e de Toulouse, UPS, LAAS, F-31400 Toulouse, France
4
ORSTAT, KU Leuven, Naamsestraat 69, 3000 Leuven, Belgium
Keywords:
Crossdocking, Truck Scheduling, Parallel Machine Scheduling, Integer Programming.
Abstract:
In this paper we study the scheduling of the docking operations of trucks at a warehouse; each truck is either
empty and needs to be loaded, or full and has to be unloaded (but not both). We focus on crossdocking,
which is a recent warehouse concept that favors the transfers of as many incoming products as possible di-
rectly to outgoing trailers, without intermediate storage in the warehouse. We propose a time-indexed integer
programming formulation for scheduling the loading and unloading of the trucks at the docks, and we distin-
guish between a so-called “mixed mode”, in which some or all of the docks can be used both for loading as
well as unloading, and an “exclusive mode”, in which each dock is dedicated to only one of the two types of
operations. Computational experiments are provided to compare the efficiency of the two modes.
1 INTRODUCTION
Crossdocking is a warehouse management concept
in which items delivered to a warehouse by in-
bound trucks are immediately sorted out, reorganized
based on customer demands and loaded into outbound
trucks for deliveryto customers, without requiring ex-
cessive inventory at the warehouse ((van Belle et al.,
2012)). If any item is held in storage, it is usually
for a brief period of time that is generally less than
24 hours. Advantages of crossdocking can accrue
from faster deliveries, lower inventory costs, and a re-
duction of the warehouse space requirement ((Apte
and Viswanathan, 2000; Boysen, 2010)). Compared
to traditional warehousing, the storage as well as the
length of the stay of a product in the warehouse is lim-
ited, which requires an appropriate coordination of in-
bound and outbound trucks ((Boysen et al., 2010; Yu
and Egbelu, 2008)).
The truck scheduling problem, which decides on
the succession of truck processing at the dock doors,
is especially important to ensure a rapid turnover and
on-time deliveries. The problem studied concerns the
operational level: trucks are allocated to the differ-
ent docks so as to minimize the storage usage dur-
ing the product transfer. The internal organization of
the warehouse (scanning, sorting, transporting) is not
explicitly taken into consideration. We also do not
model the resources that may be needed to load or
unload the trucks, which implies the assumption that
these resources are available in sufficient quantities to
ensure the correct execution of an arbitrary docking
schedule.
There exist two different service modes, which de-
pend on the degree of freedom in assigning inbound
and outbound trucks to docks. In the exclusive mode,
each dock is exclusively dedicated either to inbound
or to outbound operations. It is a widespread guide-
line in real-world terminals to ease product flows and
supervision ((Boysen and Fliedner, 2010)). Typically,
one side of the terminal is dedicated to inbound and
the other to outbound operations. In the mixed mode,
on the other hand, an intermixed sequence of inbound
and outbound trucks to be processed per dock is al-
lowed. As stated in (Carlo and Bozer, 2011), in a
typical crossdock application, once a dock is classi-
fied as an inbound (or an outbound) dock, it remains
that way until the docks are reclassified. Their ex-
periments show, however, that grouping the inbound
docks together and the outbound docks together is
generally not a good configuration to use when the
decision maker wants to minimize the travel distance
of the forklifts, which follow a rectilinear travel path
between the doors inside the warehouse. Remark that
247
Berghman L., Briand C., Leus R. and Lopez P..
The Truck Scheduling Problem at Crossdocking Terminals - Exclusive versus Mixed Mode.
DOI: 10.5220/0005205102470253
In Proceedings of the International Conference on Operations Research and Enterprise Systems (ICORES-2015), pages 247-253
ISBN: 978-989-758-075-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

the exclusive mode resembles a hybrid flow shop: the
inbound and outbound docks are the first and the sec-
ond stage, respectively. The mixed mode, on the other
hand, resembles a parallel machine scheduling prob-
lem with precedence constraints: both the inbound
and the outbound trucks are scheduled on the same
set of identical machines.
The purpose of this paper is to propose a mathe-
matical formulation of the truck scheduling problem
at crossdocking terminals operating in mixed mode
and to show its interest by comparison with the exclu-
sive mode. It is structured as follows. Section 2 gives
a brief overview of the relevant literature on the prob-
lem under study. A detailed problem description can
be found in Section 3. A time-indexed formulation is
presented in Section 4. The results of the computa-
tional experiments can be found in Section 5. Finally,
some conclusions round off the paper in Section 6.
2 LITERATURE REVIEW
The concept of crossdocking has received a lot of at-
tention in recent literature: cases with one receiving
and one shipping door are most frequently studied.
A comprehensive overview of different variations and
the available literature can be found in (Boysen and
Fliedner, 2010), (van Belle et al., 2012) and (Ma-
knoon, 2013).
(Alpan et al., 2011a) and (Alpan et al., 2011b),
on the one hand, consider a multiple-door crossdock
environment with exclusive mode of service, where
preemption of loading operations is allowed. Each
outbound truck serves a single destination; each in-
bound truck can contain products for several desti-
nations. There are several ways to treat the product
flows: (i) products can be transshipped directly from
an inbound to an outbound truck if one is available;
(ii) they can be temporarily stored to be loaded later
on; or (iii) an outbound truck can be replaced to fa-
cilitate direct loading. Contrary to our model, the
objective here is not time-related; the sum of the in-
ventory holding cost (per unit product) and the truck
replacement cost is minimized. As the sequence of
the inbound trucks is known, the problem consists in
scheduling the outbound trucks. (Alpan et al., 2011b)
try to find optimal or near-optimal scheduling poli-
cies using dynamic programming while (Alpan et al.,
2011a) present several heuristics based on constrain-
ing the solution space that is generated by the dy-
namic programming model of (Alpan et al., 2011b).
Numerical experiments show that the heuristics can
find near-optimal solutions much faster.
(Miao et al., 2009), on the other hand, consider
the truck-dock assignment problem with operational
time constraint for the mixed mode. For each pair
of inbound and outbound trucks, the number of pal-
lets that has to be transferred from the inbound to the
outbound truck is defined. Once more, the objective
is not time-related; the authors aim to minimize the
number of unfulfilled shipments and the total ship-
ment costs at the same time. The problem is for-
mulated as an integer programming model and two
metaheuristics are proposed: tabu search and a ge-
netic algorithm. It turns out that for medium-size and
large-size instances, the metaheuristic approaches are
preferred in order to get quick and good solutions.
Some articles in literature model the truck
scheduling problem at crossdocking terminals with
exclusive mode as a machine scheduling problem. In
(Chen and Lee, 2009) and (Chen and Song, 2009), the
crossdocking environment is treated as a two-stage
flow shop, but only instances with a small number
of docks are considered. The number and types of
products to be loaded (unloaded) per outbound (in-
bound) truck are not defined a priori, but each job
in the second stage (outbound; loading) can be pro-
cessed only after the processing of some jobs in the
first stage (inbound; unloading). (Chen and Lee,
2009) show that the problem is NP-hard for the two-
machine case where the objective is to minimize the
makespan. Furthermore, they present a polynomial
approximation algorithm and a branch-and-bound al-
gorithm. (Chen and Song, 2009) consider the hybrid
case where at least one stage contains more than one
machine; they present a mixed integer programming
model for small-scale instances and different heuris-
tics for moderate and large-scale instances.
(Li et al., 2004) use JIT scheduling to solve the
problem of scheduling loading and unloading activi-
ties when the goal is to complete processing each con-
tainer exactly at its due date. Each incoming container
has a release time and a due date and each outgoing
container has a due date. The crossdock can be di-
vided into an import area and an export area. Products
have known destinations before they enter the cross-
dock, such that precedence relationships arise. They
present an integer programming model, as well as two
heuristics for this NP-hard problem. The first uses
squeaky wheel optimization ((Joslin and Clements,
1999)) embedded in a genetic algorithm and the sec-
ond uses linear programming within a genetic algo-
rithm. (
´
Alvarez P´erez et al., 2009) consider the same
problem and present a solution approach based on a
combination of two metaheuristics, reactive GRASP
and tabu search. They conclude that their algorithm
is an excellent alternative to the approach of (Li et al.,
2004). Note that JIT scheduling as considered in the
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
248

two above papers amounts to minimizing the differ-
ence in completion time between each pair of tasks
that is involved in a precedence constraint. The de-
tails of the problems studied in the latter references
are such that the proposed algorithms are not suitable
for our setting.
3 DETAILED PROBLEM
STATEMENT
We examine a crossdocking warehouse where incom-
ing trucks i ∈ I need to be unloaded and outgoing
trucks o ∈ O need to be loaded (where I is the set
containing all inbound trucks while O is the set con-
taining all outbound trucks). The warehouse features
n docks that can be used both for loading and un-
loading (mixed mode). The processing time of truck
j ∈ I ∪ O equals p
j
. This processing time includes
the loading or unloading but also the transportation of
goods inside the crossdock and other handling opera-
tions between dock doors. It is assumed that there is
sufficient workforce to load/unload all docked trucks
at the same time. Hence, a truck assigned to a dock
does not wait for the availability of a material handler.
The products on the trucks are packed on unit-size
pallets, which move collectively as a unit: re-packing
inside the terminal is to be avoided. Each pallet on
an inbound truck i needs to be loaded on an outbound
truck o, which gives rise to a precedence constraint
(i,o) ∈ P ⊂ I×O, with P the set containing all couples
of inbound trucks i and outbound trucks o that share a
precedence constraint. Each truck j has a release time
r
j
(planned arrival time) and a deadline
˜
d
j
(its latest
departure time).
Products can be transshipped directly from an in-
bound to an outbound truck if the outbound truck is
placed at a dock. Otherwise, the products are tem-
porarily stored and will be loaded later on. Each
couple (i,o) ∈ P has a weight w
io
, representing the
number of pallets that go from inbound truck i to
outbound truck o. The objective is to minimize the
weighted sum of sojourn times of the pallets stocked
in the warehouse. According to (Boysen and Fliedner,
2010), this is a valuable objective because the cross-
docking concept relies on a rapid turnover of ship-
ments. It also reduces the danger of late shipments:
the number of products in the storage area can only
be decreased by loading them on outbound trucks to
leave the terminal as early as possible. Moreover, a
lower stock size also reduces the material handling
effort inside the terminal. Remark that the time spent
by a pallet in the storage area is equal to the flow time
of the pallet: the difference between the start of load-
ing the outbound trailer and the start of unloading the
inbound trailer.
Our problem can be modeled as a parallel machine
scheduling problem with release dates, deadlines, and
precedence constraints, denoted by Pm|r
i
,
˜
d
i
, prec|−.
As this problem is a generalization of the 1|r
j
,
˜
d
j
|−
problem which is NP-complete ((Lenstra et al.,
1977)), even finding a feasible solution for the prob-
lem is NP-complete.
For all trucks j ∈ I ∪O, let s
j
be the starting time
of the handling of truck j. A conceptual problem
statement with these variables is the following:
min z =
∑
(i,o)∈P
w
io
(s
o
− s
i
) (1)
subject to
s
j
≥ r
j
∀ j ∈ I ∪ O (2)
s
j
+ p
j
≤
˜
d
j
∀ j ∈ I ∪ O (3)
s
o
− s
i
≥ 0 ∀(i,o) ∈ P (4)
|A
τ
| ≤ n ∀τ ∈ T (5)
with A
τ
= { j ∈ I ∪ O| s
j
< τ ≤ s
j
+ p
j
} the set con-
taining all tasks being executed during time period τ
and T the set containing all time periods considered
(time horizon). The objective function (1) minimizes
the total weighted usage of the storage area. Con-
straints (2) and (3) impose the time windows for all
trucks. Constraints (4) ensure that, if there exists a
precedence constraint between inbound truck i and
outbound truck o, then o cannot be processed be-
fore i. Finally, constraints (5) enforce the capacity
of the docks.
Remark that if we replace constraint (5) by two
capacity constraints (one for the inbound docks with
right-hand side n
i
equal to the number of inbound
docks and one for the outbound docks with right-hand
side n
o
equal to the number of outbound docks), we
obtain a formulation for the exclusive mode. This can
be easily done for the time-indexed formulation pre-
sented in the next section as well.
4 TIME-INDEXED
FORMULATION
A time-indexed formulation discretizes the continu-
ous time space into periods τ ∈ T of a fixed length.
Let period τ be the interval [t − 1,t[. It is well
known that time-indexed formulations perform well
for scheduling problems because the linear program-
ming relaxations provide strong lower bounds ((Dyer
and Wolsey, 1990)). For this reason, we will test
TheTruckSchedulingProblematCrossdockingTerminals-ExclusiveversusMixedMode
249

the integer programming formulation below, which is
called F1 in the sequel.
For all inbound trucks i ∈ I and for all time periods
τ ∈ T
i
, we have
x
iτ
=
1 if the unloading of inbound truck i is
started during time period τ,
0 otherwise,
with T
i
= {r
i
+ 1,r
i
+ 2,.. . ,
˜
d
i
− p
i
+ 1}, the relevant
time window for inbound truck i. Additionally, for all
outbound trucks o∈ O and for all time periods τ ∈ T
o
,
we have
y
oτ
=
1 if the loading of outbound truck o is
started during time period τ,
0 otherwise,
with T
o
= {r
o
+1,r
o
+2,...,
˜
d
o
− p
o
+1}, the relevant
time window for outbound truck o.
A time-indexed formulation for the considered
truck scheduling problem is the following:
min z =
∑
(i,o)∈P
∑
τ∈T
w
io
τ(y
oτ
− x
iτ
) (6)
subject to
∑
τ∈T
i
x
iτ
= 1 ∀i ∈ I (7)
∑
τ∈T
o
y
oτ
= 1 ∀o ∈ O (8)
∑
τ∈T
τ(x
iτ
− y
oτ
) ≤ 0 ∀(i,o) ∈ P (9)
∑
i∈I
τ
∑
u=τ−p
i
+1
x
iu
+
∑
o∈O
∑
u=τ−p
o
+1
y
ou
≤ n ∀τ ∈ T (10)
x
iτ
∈ {0,1} ∀i ∈ I;∀τ ∈ T
i
(11)
y
oτ
∈ {0,1} ∀o ∈ O;∀τ ∈ T
o
(12)
The objective function (6) minimizes the total
weighted usage of the storage area. Constraints (7)
and (8) demand each truck to be assigned to exactly
one gate. Constraints (9) ensure that if there exists
a precedence constraint between inbound truck i and
outbound truck o, then o cannot be processed before i.
Constraints (10) enforce the capacity of the docks.
An alternative precedence constraint is the follow-
ing:
τ
∑
u=1
x
iu
− y
oτ
≥ 0 ∀(i,o) ∈ P;∀τ ∈ T (13)
Informally, this constraint states that in fractional so-
lutions, the loading task can only be started up to the
fraction to which the unloading task has been started.
(Christofides et al., 1987) call this constraint disag-
gregated. The formulation obtained by replacing con-
straint (9) in formulation F1 by (13) will be referred
to as F2. When we take a look at the polyhedron that
contains all feasible solutions for the LP-relaxations,
F2 is theoretically stronger since each feasible solu-
tion for the LP relaxation of formulation F2 is also
a feasible solution to the LP relaxation of formula-
tion F1. (Laborie and Nuijten, 2008) observe, how-
ever, that the additional CPU time needed to solve the
larger linear program can counterbalance the signif-
icant improvement of the bound. Both formulations
will be tested empirically.
Although in mixed mode all gates can serve both
to unload incoming trailers and to load outgoing trail-
ers, it might not be needed that every gate has this
double purpose. It is possible that in an optimal
schedule, at some gates only incoming trailers are un-
loaded and at other gates only outgoing trailers are
loaded. Indeed, since switching completely to mixed
mode might impact significantly the company orga-
nization, both because of the placing of the docks
and because of the internal transportation within the
warehouse, it is worth determining the gain obtained
when switching only a small number of docks from
exclusive to mixed mode. We remark that when a
warehouse is expanding, the additional docks can be
mixed docks, or changing only a limited number of
docks does not necessarily change the internal orga-
nization of the warehouse in a drastic way. To de-
termine the minimal number of gates that has to be
double purpose so that the optimal objective value is
kept, we can work as follows. We refer to n
i
(respec-
tively n
o
) as the number of gates that are used for un-
loading (loading) purposes. Moreover, let δ
i
(δ
o
) be
the number of gates that we allow to unload (load) in-
coming (outgoing) trailers, on top of n
i
(n
o
), during
certain time periods and define δ
∗
i
, δ
∗
o
as the optimal
values for these variables. A schematic representa-
tion is given in Figure 1. In a first stage, we solve
the formulation F1, which gives the optimal objective
value z
∗
. In a second stage, we solve a second time-
indexed formulation: we minimize δ = δ
i
+δ
o
subject
to (7)–(12) and we add the following constraints:
∑
(i,o)∈P
∑
τ∈T
w
io
τ(y
oτ
− x
iτ
) ≤ z
∗
(14)
∑
i∈I
τ
∑
u=τ−p
i
+1
x
iu
≤ n
i
+ δ
i
∀τ ∈ T (15)
∑
o∈O
τ
∑
u=τ−p
o
+1
y
ou
≤ n
o
+ δ
o
∀τ ∈ T (16)
n
i
+ n
o
= n (17)
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
250

Figure 1: Schematic representation.
The values of δ
i
and δ
o
are calculated in constraints
(15) and (16), respectively. Constraints 10 ensuring
in any case that the sum of used gates never exceeds
the total gate capacity. By minimizing their sum, we
minimize the number of gates that are used both for
loading as well as for unloading.
5 COMPUTATIONAL RESULTS
To the best of our knowledge, the problem studied in
this paper was never studied as such. Thus, we create
new instances in line with (Chen and Song, 2009) and
(Li et al., 2004) in the following way.
Remark that we rounded all fractional values to
obtain integer data. The number of gates is n ∈
{10, 20,30}. The number of inbound trucks is |I| ∈
{3n, 4n,5n} and the number of outbound trucks is
|O| ∈ {0.8|I|,|I|,1.2|I|}. Since the time needed to
unload one pallet equals one time unit, the time
needed to unload a trailer i, equals the number of pal-
lets to be unloaded. The processing time p
i
is uni-
formly distributed in [a,30] with a ∈ {10,20,30}. For
each inbound truck i, the number of outbound trucks
in which goods of truck i will be loaded is nb
i
∈
{1,.. . ,
p
i
γ
}. The number of precedence constraints is
determined by γ: the larger γ, the more precedence
constraints. These outbound trucks are chosen ran-
domly. The number of pallets that will be charged
from this inbound truck i to one of the correspond-
ing outbound trucks o is nb
io
∈ {0.8
p
i
nb
i
,
p
i
nb
i
,1.2
p
i
nb
i
}.
There exists a precedence constraint (i,o) ∈ P be-
tween an inbound trailer i and an outbound trailer o
when at least one pallet is associated with both in-
bound trailer i and outbound trailer o. The weight
w
io
of a precedence constraint (i,o) ∈ P is equal to
the number of pallets that need to be unloaded from
inbound trailer i and loaded to outbound trailer o
afterwards. The time needed to load an outbound
trailer o is equal to the number of pallets that will be
loaded in this trailer. The ready times r
i
for the in-
bound trailers are uniformly distributed in [0, α
∑
p
j
n
]
with α ∈ {0.3, 0.6,0.9}. The deadlines for the out-
bound trailers are in
˜
d
o
∈ [φΩ
o
,βΩ
o
] with Ω
o
=
max
(i,o)∈P
{r
i
+ p
o
}. The length of the time horizon
is |T| = max
o∈O
{
˜
d
o
}. The ready times r
o
for the out-
bound trailers are uniformly distributed in [r
max
o
,
˜
d
o
−
p
o
] with r
max
o
= max
(i,o)∈P
{r
i
}. The deadlines for
the inbound trailers
˜
d
i
are uniformly distributed in
[1.5(r
i
+ p
i
),
˜
d
max
i
] with
˜
d
max
i
= min{min
(i,o)∈P
{
˜
d
o
−
p
o
} + p
i
,max
(i,o)∈P
{
˜
d
o
}}.
Remark that γ, φ and β are parameters. The tight-
ness of the time windows is determined by φ and β:
the smaller the difference between β and φ, the tighter
the time windows. We will assign different values to
both γ and β to obtain different datasets.
All models are encoded in C using the Microsoft
Visual Studio programming environment, and exe-
cuted on a PC computer with an Intel Core i3-2350M
CPU 2.30-GHz processor and 2 GB RAM, equipped
with Windows 7. ILOG CPLEX 12.4 is used to solve
the models.
As preliminary experiments, we created 567 in-
stances : we fixed the parameters γ = 3, φ = 1.5 and
β = 5 and we created three instances for each combi-
nation of the other parameters. An instance is named
after its parameters : “n
|I| |O| a α index”. We have
implemented both constraints (9) and (13) as prece-
dence constraints and we have remarked that the for-
mulation performs better with constraint (9). The fol-
lowing results refer to this formulation. Detailed re-
sults can be found in Table 1: for each set of in-
stances, the average number of instances that were
proved to be infeasible, the average number of in-
stances for which a feasible solution was found that
was not proven to be optimal and the average num-
ber of instances for which an optimal solution was
found are mentioned both for exclusive and for mixed
mode. Overall, for the exclusive mode, 22% of the
instances were proved to be infeasible, while none of
them were proved infeasible for the mixed mode. This
is a first evidence that companies can expect more
flexibility when switching from exclusive to mixed
mode. For the exclusive mode, a feasible solution
was found within a time limit of five minutes for 69%
of the instances; for 2% of all instances, this solu-
tion was proven to be an optimal solution. For the
mixed mode, a feasible solution was found for 93%
of the instances, and for 3% of all instances this solu-
tion was optimal. When we only look at the instances
for which an optimal solution was found, the aver-
age computation time to find these optimal solutions
is 70 seconds for the exclusive mode and 23 seconds
for the mixed mode. To give an idea about the qual-
ity of the solutions founds, we mention that the av-
TheTruckSchedulingProblematCrossdockingTerminals-ExclusiveversusMixedMode
251
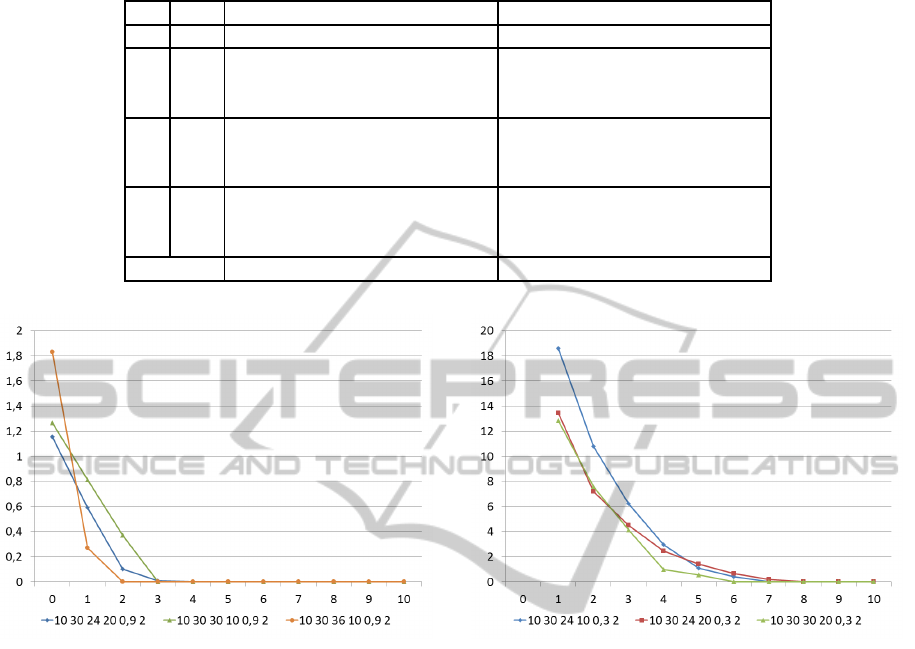
Table 1: Computational results.
exclusive mode mixed mode
n |I| infeasible feasible optimal infeasible feasible optimal
10 30 23.81% 65.08% 11.11% 0.00% 84.13% 15.87%
10 40 23.81% 74.60% 1.59% 0.00% 96.83% 3.17%
10 50 26.98% 63.49% 0.00% 0.00% 98.41% 0.00%
20 60 12.70% 82.54% 3.17% 0.00% 96.83% 3.17%
20 80 22.22% 73.02% 0.00% 0.00% 98.41% 0.00%
20 100 23.81% 61.90% 0.00% 0.00% 90.48% 0.00%
30 90 15.87% 77.78% 0.00% 0.00% 95.24% 4.76%
30 120 19.05% 65.08% 0.00% 0.00% 95.24% 0.00%
30 150 28.57% 53.97% 0.00% 0.00% 79.69% 0.00%
total 21.87% 68.61% 1.76% 0.00% 92.95% 3.00%
Figure 2
.
erage GAP between the best solution found within 5
minutes and the optimal solution of the linear relax-
ation of the formulation is 13,28%. The average GAP
with respect to a Lagrangian relaxation that we imple-
mented is 6,73%. When we compare the instances for
which a feasible solution was found both for the ex-
clusive and mixed modes, we calculated an improve-
ment of 8% of the objective value with a mixed mode.
This is a second evidence that companies might take
profits from switching to a mixed organization.
We minimized the number of double purpose
gates δ for the 17 instances for which we found an
optimal solution for the mixed mode. For 6 of these
instances, we found a feasible solution that was not
guaranteed to be optimal; the average number of dou-
ble purpose gates is 49%. For the other instances, we
found an optimal solution. The average number of
double purpose gates is 27% and the average compu-
tation time is 50 seconds.
In Figures 2 and 3, we illustrate the results ob-
tained with three instances having 10 docks. On the
horizontal axis, we display the number of docks δ =
Figure 3
.
δ
i
+ δ
o
(out of 10) switched in mixed mode. On the
vertical axis, we indicate the GAP = 100∗ (z− z
∗
)/z
∗
between the obtained solution z and the optimal solu-
tion z
∗
when all docks are in mixed mode. In Figure 2,
we can see that for instances with a rather small differ-
ence between exclusive and mixed mode (some 2%),
only changing one, two, or three docks (out of 10) to
mixed mode is enough to obtain the optimal solution
obtained when all docks are in mixed mode. Figure 3
shows instances for which the exclusive mode is in-
feasible. Having only one dock in mixed mode allows
finding a feasible solution, and better solutions are ob-
tained when the number of mixed gates increases.
6 CONCLUSIONS
We have presented a time-indexed (integer program-
ming) formulation for the truck scheduling problem
at crossdocking terminals. We have experimentally
compared the mixed mode strategy with the exclu-
sive one. As might be expected, the results confirm
ICORES2015-InternationalConferenceonOperationsResearchandEnterpriseSystems
252

that it is easier to find a feasible solution, or even an
optimal one, when handling terminals operating with
a mixed mode. Moreover, our experiments provide
insight into the number of gates to be changed from
exclusive to mixed in order to guarantee the best per-
formance.
For future research, it may be interesting to inves-
tigate the special case of the problem with p
i
= p.
The complexity of Pm|r
i
,
˜
d
i
, p
i
= p|
∑
w
i
C
i
is open
((Kravchenko and Werner, 2011)) and this problem is
a special case of our problem with p
i
= p : take |I| = 1
with i ∈ I, define
˜
d
i
= r
i
+ p
i
such that s
i
= r
i
and de-
fine for all o ∈ O, r
′
o
= max{r
o
;r
i
+ p
i
} and w
o
= w
io
.
Another interesting problem is an extension in
which trailers are allowed to remain at the gate longer
than strictly needed for loading or unloading. In this
way, the number of direct transfers from inbound to
outbound trailers can be augmented and consequently,
the usage of the storage area can be decreased.
ACKNOWLEDGEMENTS
This research was part of ROCKS project supported
by CNRS/INS2I (Centre National de la Recherche
Scientifique/Institut des Sciences de l’Information et
de leurs Interactions), PICS action n 6421.
REFERENCES
Alpan, G., Ladier, A.-L., Larbi, R., and Penz, B. (2011a).
Heuristic solutions for transshipment problems in a
multiple door cross docking warehouse. Computers
& Industrial Engineering, 61(2):402–408.
Alpan, G., Larbi, R., and Penz, B. (2011b). A bounded dy-
namic programming approach to schedule operations
in a cross docking platform. Computers & Industrial
Engineering, 60(3):385–396.
´
Alvarez P´erez, G., Gonz´alez-Velarde, J., and Fowler, J.
(2009). Crossdocking – Just in time scheduling: an
alternative solution approach. Journal of the Opera-
tional Research Society, 60:554–564.
Apte, U. and Viswanathan, S. (2000). Effective cross dock-
ing for improving distribution efficiencies. Interna-
tional Journal of Logistics: Research and Applica-
tions, 3(3):291–302.
Boysen, N. (2010). Truck scheduling at zero-inventory
cross docking terminals. Computers & Operations Re-
search, 37:32–41.
Boysen, N. and Fliedner, M. (2010). Cross dock scheduling:
Classification, literature review and research agenda.
Omega, 38:413–422.
Boysen, N., Fliedner, M., and Scholl, A. (2010). Scheduling
inbound and outbound trucks at cross docking termi-
nals. OR Spectrum, 32:135–161.
Carlo, H. and Bozer, Y. (2011). Analysis of optimum shape
and door assignment problems in rectangular unit-
load crossdocks. International Journal of Logistics:
Research and Applications, 14(3):149–163.
Chen, F. and Lee, C.-Y. (2009). Minimizing the makespan
in a two-machine cross-docking flow shop problem.
European Journal of Operational Research, 193:59–
72.
Chen, F. and Song, K. (2009). Minimizing makespan
on two-stage hybrid cross docking schedule problem.
Computers & Operations Research, 36:2066–2073.
Christofides, N., Alvarez-Vald´es, R., and Tamarit, J.
(1987). Project scheduling with resource constraints:
A branch-and-bound approach. European Journal of
Operational Research, 29(3):262–273.
Dyer, M. E. and Wolsey, L. A. (1990). Formulating the sin-
gle machine sequencing problem with release dates as
a mixed integer problem. Discrete Applied Mathemat-
ics, 26:255–270.
Joslin, D. E. and Clements, D. P. (1999). Squeaky wheel op-
timization. Journal of Artificial Intelligence Research,
10(1):353–373.
Kravchenko, S. and Werner, F. (2011). Parallel machine
problems with equal processing times: a survey. Jour-
nal of Scheduling, 14(5):435–444.
Laborie, P. and Nuijten, W. (2008). Constrained pro-
gramming formulations and propagation algorithms.
In Artigues, C., Demassey, S., and N´eron, E., edi-
tors, Resource-Constrained Project Scheduling. Con-
trol Systems, Robotics and Manufacturing Series.
ISTE Ltd. Chapter 4.
Lenstra, J., Kan, A. R., and Brucker, P. (1977). Complexity
of machine scheduling problems. Annals of Discrete
Mathematics, 1:343–362.
Li, Y., Lim, A., and Rodrigues, B. (2004). Crossdocking
– JIT scheduling with time windows. Journal of the
Operational Research Society, 55:1342–1351.
Maknoon, M. Y. (2013). Scheduling material handling in
cross-docking terminals. PhD thesis,
´
Ecole polytech-
nique de Montr´eal.
Miao, Z., Lim, A., and Ma, H. (2009). Truck dock assign-
ment problem with operational time constraint within
crossdocks. European Journal of Operational Re-
search, 192:105–115.
van Belle, J., Valckenaers, P., and Cattrysse, D. (2012).
Cross docking: State of the art. Omega, 40(6):827–
846.
Yu, W. and Egbelu, P. (2008). Scheduling of inbound and
outbound trucks in cross docking systems with tem-
porary storage. International Journal of Production
Economics, 184:377–396.
TheTruckSchedulingProblematCrossdockingTerminals-ExclusiveversusMixedMode
253
