
Shape-based Object Retrieval and Classification with Supervised
Optimisation
Cong Yang
1
, Oliver Tiebe
1
, Pit Pietsch
2
, Christian Feinen
1
, Udo Kelter
2
and Marcin Grzegorzek
1
1
Research Group for Pattern Recognition, University of Siegen, Siegen, Germany
2
Software Engineering and Databases Group, University of Siegen, Siegen, Germany
Keywords:
Object Retrieval, Object Classification, Optimisation, Shape Features.
Abstract:
In order to enhance the performance of shape retrieval and classification, in this paper, we propose a novel
shape descriptor with low computation complexity that can be easily fused with other meaningful descriptors
like shape context, etc. This leads to a significant increase in descriptive power of original descriptors without
adding to much computation complexity. To make the proposed shape descriptor more practical and general,
a supervised optimisation strategy is introduced. The most significant scientific contributions of this paper
includes the introduction of a new and simple feature descriptor with supervised optimisation strategy leading
to the impressive improvement of the accuracy in object classification and retrieval scenario.
1 INTRODUCTION
Shape retrieval and classification are very important
topics in computer vision. In order to improve the ac-
curacy of shape matching a number of new shape de-
scriptors have been proposed in recent years (Zhang
and Lu, 2004) to effectively find perceptually simi-
lar shapes from a database. In addition, some learn-
ing methods (Bai et al., 2010) have been employed on
the top of shape matching algorithms to involve more
shape context information.
However, it is a difficult task to develop appro-
priate shape descriptors and matching algorithms.
Firstly, a desirable shape descriptor should be in-
variant to shape rotation, translation and scaling.
Though skeleton-based matching approaches (Goh,
2008; Hedrich et al., 2013; Bai and Latecki, 2008)
can effectively classify shapes, most of them require
heavy calculation for skeleton pruning (Bai et al.,
2007) and for determining correspondences (Bai and
Latecki, 2008). Secondly, for both shape descrip-
tors and matching algorithms, there are many uncer-
tain parameters that are involved in the feature gener-
ation and matching processes which are hard to be
optimised by experiences among different datasets.
Over the past decade or so, computer scientists have
proposed many meaningful shape descriptors like In-
ner Distance (Ling and Jacobs, 2007), Shape Con-
text (Belongie et al., 2002). However, in order to re-
duce the computing complexity, researchers usually
employ only a partial number of points which are ran-
domly selected or sampled with fixed distances along
the shape contour. This strategy could easily lose crit-
ical features since some vertexes or partial deforma-
tions might be overlooked.
Motivated by the above mentioned problems, in
this paper, we propose a new shape descriptor which
involves both global and partial shape features with
low computation complexity. Moreover, the proposed
shape descriptor can be easily fused with other mean-
ingful descriptors (Belongie et al., 2002; Bai and
Latecki, 2008; Ling and Jacobs, 2007; Chang and
Kimia, 2009; Siddiqi et al., 1998) to enhance the
shape matching and classification performance with-
out increasing too much the computation complexity.
The contribution of this paper addresses as well the
challenges mentioned above. Firstly, we introduce a
new shape descriptor in form of a 10-dimensionalfea-
ture vector. This shape descriptor integrates geomet-
rical and topological features with low computation
complexity and is robust to shape deformation. Sec-
ondly, we introduce a matching algorithm in which
feature weights are optimised by a supervised opti-
misation strategy. This strategy can efficiently adopt
our feature vector to diverse datasets. Experimental
results demonstrate that the optimised SVM classifier
obtains much better accuracy than the non-optimised
one.
204
Yang C., Tiebe O., Pietsch P., Feinen C., Kelter U. and Grzegorzek M..
Shape-based Object Retrieval and Classification with Supervised Optimisation.
DOI: 10.5220/0005186402040211
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 204-211
ISBN: 978-989-758-076-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
In this section, some existing approaches relating to
shape descriptors for object retrieval and classifica-
tion are discussed. We categorise them into two
groups: contour-based descriptors and skeleton-based
descriptors. The relevant matching algorithms are
also introduced in this section.
2.1 Contour-based Shape Descriptors
Nguyen et al. (Nguyen et al., 2013) propose a shape-
based local binary descriptor for object detection that
has been tested in the task of detecting humans from
static images. In (Cao et al., 2011), an algorithm for
partial shape matching with mildly non-rigid defor-
mations using Markov chains and the Monte Carlo
method is introduced. Both of these methods do
not involve context information for object matching.
Shotton et al. (Shotton et al., 2005) present a cat-
egorical object detection scheme that uses only lo-
cal contour-based features and is realised in a partly
supervised learning framework. However, in this
method many parameters need to be configured man-
ually. Yang et al. (Yang et al., 2012) formulate the
contour-based object detection as a matching problem
between model contour parts and image edge frag-
ments. They treat this problem as the task of finding
dominant sets in weighted graphs. Though insensi-
tive to noise and outliers, the approach is not rotation
invariant. Different from the previous contour-based
descriptors, our proposed descriptor combines both
global and local shape features. Moreover,all features
in our descriptor have corresponding weights which
can be easily adapted to different datasets. Lastly, pa-
rameters in our method are automatically optimised
by a supervised optimisation strategy.
2.2 Skeleton-based Shape Descriptors
Compared to contour-based descriptors, skeleton-
based shape descriptors feature lower sensitivity
to occlusion, limb growth, and articulation (Goh,
2008). However, they are computationally more
complex (Sebastian and Kimia, 2001) and still have
not been fully successfully applied to real images.
Baseski et al. (Baseski et al., 2009) present a tree-
edit-based shape matching method that uses a recent
coarse skeleton representation. Their dissimilarity
measure obtains a better result within groups than be-
tween group separation which mimics the asymmet-
ric nature of human similarity judgements. To the
best of our knowledge, the best performing skeleton-
based object matching algorithm has been proposed
by Bai et al. (Bai and Latecki, 2008). Their main
idea is to match skeleton graphs by comparing the
geodesic paths between skeleton endpoints. Unfor-
tunately, the performance of this method is limited
to the presence of large protrusions, since they re-
quire skipping a large number of skeleton endpoints.
Moreover, skeleton pruning and correspondence es-
timation increase the computation complexity of the
method. Based on skeleton, Shock Graphs (Siddiqi
et al., 1998) and Medial Scaffolds (Chang and Kimia,
2009) are proposed for shape matching. In this paper,
skeleton is also used for our proposed feature gener-
ation. However, we only use skeleton length as one
feature for global shape description and do not per-
form any pruning or correspondence estimation.
2.3 Matching Algorithms
Although Hausdorff distance (Mmoli, 2007) is one of
the classical shape matching method, we cannot di-
rectly use it since it is a correspondence-basedmethod
and has often been used to locate objects in an im-
age. Shape contexts (Belongie et al., 2002; Bai et al.,
2010) is an improvement to traditional Hausdorff dis-
tance based methods (Mmoli, 2007; Siddiqi et al.,
1998; Del Bimbo and Pala, 1997). The matching of
two shapes is done by matching two context maps of
the shapes, which is a matrix-based matching (Be-
longie et al., 2002). However, considering the trade-
off between accuracy and efficiency, involving ma-
trix operations is too expensive for our experiment.
Bimbo (Del Bimbo and Pala, 1997) proposed the use
of elastic matching. This approach is not practical for
on-line image retrieval, mainly because of the compu-
tation and matching complexity. In contrast to previ-
ous methods, in this paper,we design our matching al-
gorithm with low complexity and fully exert merits of
each feature in our feature space by individual weight-
ing and global optimisation. Moreover,by supervised
optimisation strategy on matching algorithm, our pro-
posed shape descriptor can be easily adapted to differ-
ent databases by selecting weights for each features.
3 OBJECT REPRESENTATION
Prior to feature extraction, we adjust the orientation of
each object by rotating it to the point, that the straight
line connecting its two maximally distant contour
points becomes vertical and the majority of contour
points lie on the left side of this line (See Figure 1). If
the number of contour points on both sides of the line
PP
′
are the same, we will adjust the orientation to the
point, that the straight line connecting its two maxi-
Shape-basedObjectRetrievalandClassificationwithSupervisedOptimisation
205

w
h
l
P
P
′
w
1
w
2
w
3
h
1
h
2
h
3
A
1
A
2
A
3
s
Figure 1: Shape bounding box and equally high sub-boxes
(h
1
= h
2
= h
3
) used for feature extraction; A
1
, A
2
, and A
3
are the areas of the top, middle, and bottom sub-objects,
respectively.
mally distant contour points becomes vertical and the
majority of contour points lies on the upper h/2 side.
If the object is star-like or circle-like shape, we will
select one straight line connecting its two maximally
distant contour points and rotate the object so that the
straight line becomes vertical.
An object shape is described by a 10-dimensional
feature vector c
c
c
′
. For this, we use the bounding box
of the whole shape as well as the three equally high
sub-boxes shown in Figure 1. Here we subdivide the
bounding box into 3 equally high sub-boxes, this is
based on the trade-off between configuration and fine-
ness of subdivision. If we decompose the bounding
box into more sub-boxes, each shape sub-component
located in sub-boxes are tending to be similar. This
could give rise to miss-corresponding during object
matching process. Based on experiments,3 sub-boxes
selection achieves the best performance in terms of
accuracy and robustness.
The first element c
′
1
and the last element c
′
10
of the
feature vector express the length of the object contour
and the length of object skeleton s, respectively. The
remaining elements are computed as follows:
c
′
2
=
h
w
, c
′
3
=
h
1
w
1
, c
′
4
=
h
2
w
2
, c
′
5
=
h
3
w
3
c
′
6
=
A
3
A
1
, c
′
7
=
A
2
A
1
, c
′
8
= A
1
+ A
2
+ A
3
, c
′
9
= l
. (1)
Subsequently, we perform two feature normalisation
steps. First, in order to ensure scale invariance, we
divide the non-ratio elements of the feature vector by
a half of the bounding box perimeter:
c
c
c
⋆
=
c
c
c
′
w+ h
= (c
⋆
1
,c
⋆
8
,c
⋆
9
,c
⋆
10
)
T
. (2)
Second, we linearly scale the feature values to the
range (0,1]:
c
c
c =
c
c
c
⋆
− min{c
⋆
1
,... ,c
⋆
10
} + 1
max{c
⋆
1
,. .. ,c
⋆
10
} − min{c
⋆
1
,. .. ,c
⋆
10
} + 1
. (3)
In order to avoid the situation that c
c
c = 0 and zero de-
nominator, we add value 1 to both numerator and de-
nominator. The scaling is needed for the Support Vec-
tor Machines applied in the classification step. The
main advantage of scaling is to avoid attributes in
greater numeric ranges dominating those in smaller
numeric ranges. Another advantage is to avoid nu-
merical difficulties during the calculation. Because
kernel values usually depend on the inner products of
feature vectors (e.g., the linear kernel and the poly-
nomial kernel), large attribute values might cause nu-
merical problems.
4 OBJECT RETRIEVAL AND
CLASSIFICATION
In this section, we propose a similarity function on
our feature vector for object retrieval. For object clas-
sification, we introduce the way for classifier building
and kernel function selection. The supervised optimi-
sation method will be described in the last part of this
section.
4.1 Object Retrieval
In order to solve the object retrieval problem, we in-
troduce a similarity measure between contours. As-
sume C
C
C
⋆
and C
C
C
⋄
are two objects represented by our
proposed feature vectors:
C
C
C
⋆
= (c
c
c
⋆
1
,c
c
c
⋆
2
,. .. ,c
c
c
⋆
n
,. .. ,c
c
c
⋆
10
)
C
C
C
⋄
= (c
c
c
⋄
1
,c
c
c
⋄
2
,. .. ,c
c
c
⋄
k
,. .. ,c
c
c
⋄
10
)
. (4)
Now, we introduce a dissimilarity measure for feature
vectors belonging to different objects C
C
C
⋆
and C
C
C
⋄
:
d(C
C
C
⋆
,C
C
C
⋄
) =
1
10
10
∑
m=1
σ
m
|c
⋆
m
− c
⋄
m
|
|c
⋆
m
+ c
⋄
m
|
, (5)
where σ
m
is the weight for each feature achieved in
an optimisation process explained later in this sec-
tion. σ
m
can be optimised to adapt the proposed fea-
ture vector to different datasets. Moreover, it helps
the proposed feature to avoid the overfitting prob-
lem by applying a proper σ
m
to different features.
Our dissimilarity measure has been inspired by Chi-
Square kernel (Hazewinkel, 2001), which comes from
the Chi-Square distribution. Since our shape descrip-
tor contains a bag of features that are discretely dis-
tributed and Chi-Square kernel can effectively model
the overlap among them. The values of the dissimilar-
ity function (5) belong to the range d(C
C
C
⋆
,C
C
C
⋄
) ∈ [0, 1]
which enables their easy conversion to similarity val-
ues:
s(C
C
C
⋆
,C
C
C
⋄
) = 1− d(C
C
C
⋆
,C
C
C
⋄
) . (6)
4.2 Object Classification
In this experiment, we selected an SVM which ex-
tracts a decision boundary between shapes of differ-
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
206

ent classes based on the margin maximisation prin-
ciple. Due to this principle, the generalisation error
of the SVM is independent of the number of feature
dimensions. Furthermore, a complex (non-linear) de-
cision boundary can be extracted using a non-linear
SVM. In this process, images in a high-dimensional
feature space are mapped into a higher-dimensional
feature space using a kernel trick. In this experi-
ment, we choose Radial Basis Function (RBF) as ker-
nel function for three reasons. Firstly, RBF kernel
non-linearly maps samples into a higher dimensional
space so, unlike the linear kernel, it can handle the
case in which the relation between class labels and
attributes is nonlinear. Secondly, The RBF kernel
has less hyper parameters than the polynomial ker-
nel which reduces the complexity of model selection.
In our case, there are only two parameters (C,γ) that
need to be determined and we optimise them by our
proposed optimisation method. Thirdly, as the num-
ber of instances is much larger than the number of
features, the RBF kernel has fewer numerical difficul-
ties and leads to shorter training time.
In our work, we apply a multi-class Support
Vector Machine (mSVM) using its one-against-one
(1vs1) version which works with a voting strategy. It
uses a two-class SVM for each pair from a set of all
considered classes {ω
1
,ω
2
,.. . ,ω
K
}. Thus, if there
are K classes in total, K(K − 1)/2 two-class classi-
fiers have to be used. First, a sample pattern (query
pattern) is classified using all these two-class SVMs.
The final classification result is determined by count-
ing to which class the sample pattern has been as-
signed most frequently.
4.3 Supervised Optimisation
The performance of matching and kernel functions
in retrieval and classification systems is heavily de-
pendent on the choice of appropriate parameters.
These parameters are mutually dependent and there-
fore need to be optimised simultaneously. In prac-
tice, parameters are selected and optimised manually,
based on the knowledge of experts. Obviously, this is
an exhaustive and tedious process. In this section we
propose the use of an effective, supervised optimisa-
tion strategy to automatically improve the quality of
retrieval and classification systems.
Traditional optimisation methods use iterative
strategies, which do not produce satisfactory results
when applied to high dimensional problems. How-
ever, heuristic methods are well suited for such opti-
misation problems where multiple parameters have to
be optimised simultaneously. In this paper we employ
a combination of two heuristic optimisation meth-
ods: Gradient Hill Climbing (Russell and Norvig,
2009) integrated with Simulated Annealing (Kirk-
patrick et al., 1983).
The Gradient Hill Climbing method starts with
randomly selected parameters. Then it changes sin-
gle parameters iteratively to find a better set of pa-
rameters. A fitness function then evaluates whether
the new set of parameters performs better or worse.
The Simulated Annealing strategy impacts the degree
of the changes. In later iterations, the changes to the
parameters are getting smaller. This strategy can ef-
ficiently reduce the computational complexity of our
optimisation method.
By in- and decreasing all parameters separately
with a specified magnitude that describes a conver-
gent zero series, the gradient for maximum enhance-
ment is computed. Adding this gradient to the previ-
ous parameters results in the parameters for the next
iteration.
To use this heuristic strategy we have to define fit-
nessfunctions. A fitnessfunction evaluates the quality
of a result for a set of given parameters. In case of
classification systems the results are good when high
classification rates are achieved. Hence, the fitness-
function for our classification system simply com-
putes the classification rate. The case is a bit more
difficult for retrieval systems.
In our work we evaluate a retrieval result in two
ways. One way is to calculate the bull’s eye retrieval
rate (see 5.1). The other way is to analyse the re-
sulting similarity table for all possible query objects,
and count how often the query class appears on ev-
ery position. The result of this computation is then
condensed to a single value s by application of the
following methods:
The function f transforms the position of an ob-
ject o in the similarity ranking of an object j to the in-
dex of object o. The indices are grouped by category,
objects of the same category have following indices.
f : N × N → N (7)
Using f we can evaluate single lines of our rank-
ing tables using the function p(i, j, n) by taking i as
index of query image, j as rank in ascending simi-
larity tables and n as number of images per category.
We count points for every object with the same class
as the query object. To put a higher emphasis on the
first positions of the ranking in the resulting score we
give quadratic points for every right object.
p(i, j,n) =
(
j
2
⌊i/n⌋ = ⌊ f(i, j)/n⌋
0 ⌊i/n⌋ 6= ⌊ f(i, j)/n⌋
(8)
To calculate the final score an addition of all points
in the last 2n lines is needed because the best 2n im-
Shape-basedObjectRetrievalandClassificationwithSupervisedOptimisation
207

Table 1: Retrieval results on MPEG-7 dataset. Results are summarised as the number of shapes from the same class among
the first top 1-10 shapes. No Opt shows results from our matching algorithm without optimisation. CS Opt shows results
using our matching algorithm with Graph Transduction optimisation. Our Opt shows results using our matching algorithm
with supervised optimisation.
1st 2nd 3rd 4th 5th 6th 7th 8th 9th 10th
No Opt 700 647 600 567 521 488 447 426 405 342
GT Opt (Bai et al., 2010)
640 584 552 501 463 424 398 381 303 145
Our Method 700 657 615 591 553 518 475 467 420 363
ages are taken into consideration for bull’s eye re-
trieval rate. Following is the corresponding formula:
s =
n
∑
i=1
nc
∑
j=nc−2n
p(i, j,n) (9)
where c denotes the number of classes.
5 EXPERIMENTS AND RESULTS
To evaluate the performance of the proposed method,
we have performed experiments in an object re-
trieval and a classification scenario using four differ-
ent datasets. Moreover, we also conducted an experi-
ment with a fused descriptor to evaluate the improve-
ment of existing shape descriptors that are fused with
our proposed method.
5.1 Shape-based Object Retrieval
First, we illustrate our proposed algorithm for object
retrieval on the MPEG-7 dataset, which has 70×20=
1,400 shapes. In order to optimise the parameters in-
volved in our matching algorithm, we randomly se-
lect 10 objects from each category, there are in total
10 × 70 = 700 objects used for supervised optimisa-
tion. After optimising all parameters, we employ the
remaining 700 objects for testing. Table 1 shows the
retrieval results with and without supervised optimi-
sation process.
We employ Retrieval Rate for results comparison.
The retrieval rate is measured by the so-called bulls-
eye score. Every shape in the database is compared
to all other shapes, and the number of shapes from
the same class among the 20 most similar shapes is
reported. The bulls-eye scores from other references
are on all 1400 images, while here we are on 700 im-
ages. Therefore, in order to ensure the correctness of
our result, we iterativelydo the train/test split multiple
times and an average value is reported. The proposed
supervised optimisation with our matching algorithm
achieves 94.0% retrieval rate on MPEG-7 dataset.
Although Michael (Donoser and Bischof, 2013)
has already achieved a 100% bullseys score on
MPEG-7 dataset, the purpose of their method is dif-
ferent from ours. In this paper, we propose a simple
and effective shape descriptor that can be fused with
other shape descriptors. In order to make our descrip-
tor more flexible and equip it with a higher adaptive-
ness, a supervised optimisation strategy is introduced.
We do not involve any manifold structure defined by
pairwise affinity matrices. On the contrary, Graph
Transduction(Bai et al., 2010) and diffusion (Donoser
and Bischof, 2013) can be used after our method to
improve subsequent applications like retrieval.
Our algorithm achieves 94.0% retrieval rate on
MPEG-7 dataset. This suggests that the MPEG-7
might not be sufficient to judge the quality of our pro-
posed method. Therefore, we conducted another set
of evaluation on dataset MEPG-400 which is a subset
of the MPEG-7 collection, consisting of 400 objects
categorised in 20 classes (second row in Figure 2).
These shapes have much larger intra-class variations
and inter-class similarities than the MPEG-7 dataset.
We performed a comparison to the algorithm using
contour segments corresponding. Since this database
is the subset of MPEG-7, in this experiment, we em-
ploy the same parameter values from the first exper-
iment, and implement the object retrieval process on
MPEG-400. To evaluate the behaviour of our pro-
posed feature space and matching algorithm, we ap-
ply the experiment in both with and without any opti-
misation. Experiment results show that our proposed
method performs better than contour segment. More-
over, from Table 2, we can clearly observe that our
proposed matching algorithm with supervised optimi-
sation made a significant progress on MPEG-400.
In order to proof applicability of our approach to
enhance the performance of existing shape descrip-
tors, we conducted a set of evaluations on Kimia-216
and MPEG-400 dataset. We first perform the experi-
ment only with Shape Context and then the fused de-
scriptor between Shape Context (fused weight: 0.7)
and proposed feature vector (fused weight: 0.3).
The fused weights are also learned from our super-
vised optimisation method. Table 4 shows that the
fused descriptor achieves significant progress on both
databases.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
208
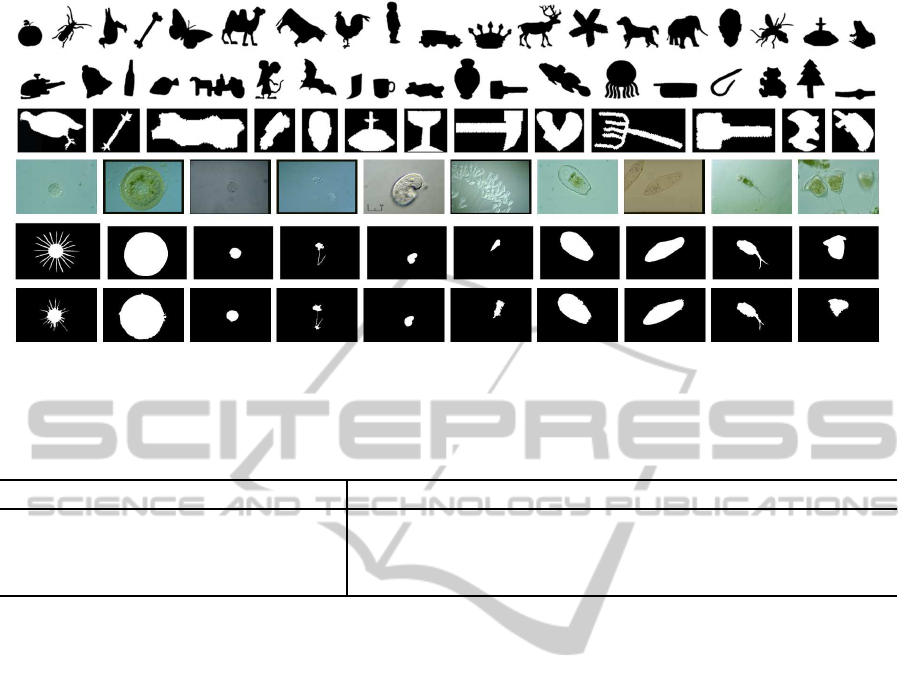
Figure 2: Example shapes from the experimental datasets: MPEG-7 (first row), MPEG-400 (second row), Kimia-216 (third
row) and EM-200 (fourth row with original, fifth row with manually- and sixth row with semi-automatically segmented).
Table 2: Object retrieval on MPEG400 dataset. Our Method (No-Opt) represents the retrieval results using our matching
algorithm with default parameters; Our Method (Opt) shows the retrieval results using our matching algorithm with supervised
optimised parameters.
1st 2nd 3rd 4th 5th 6th 7th 8th 9th 10th
Contour Segments (Yang et al., 2014b) 375 348 333 325 317 311 300 295 276 275
Our Method (No-Opt)
381 355 341 320 322 316 304 295 269 260
Our Method (Opt) 381 370 365 354 337 342 328 315 300 301
5.2 Shape-based Object Classification
In this part, we implement the experiment of classifi-
cation on MPEG-7. As already discussed in Section
4, here we use Radial Basis Function (RBF) as the
kernel function for support vector machine. Like in
the previousexperiment, we randomly split the shapes
into half for training and half for testing. During the
training phase, we are not only able to build clas-
sifiers with training data, but also seeking for best
parameters with optimisation strategy. All of these
tasks are done by 700 training images. The train-
ing set includes all the object classes. Another 700
testing objects are only used for testing. In this ex-
periment, there are two parameters that need to be
optimised, C for cost of SVM and γ in RBF kernel
function. The default values are C = 1 and γ = 1/n,
where n is the number of features. In our case, the
default values are n = 10 and γ = 0.1. As shown in
Table 3, in order to increase statistical relevance, we
repeated the selection process 10 times which led to
10 different training datasets and corresponding test-
ing datasets. Each column refers to an experiment
with different training datasets. Experiments are per-
formed for all these datasets and mean classification
rates are reported. SSDP shows the results of scaled
datasets with default parameters. Results shows that
our method achieves significant progress in this ex-
periment. Actually, SVM and RBF kernel are highly
related to parameters selection and our method can
improve its performance sufficiently.
We also compare our optimised classification rate
to existing methods with the MPEG-7 dataset. As
shown in Table 5, our method yields a promising
score compared to existing methods. The Skeleton
Path achieves similar results as ours. However, the
computation complexity of our feature vector is much
lower than that of the skeleton path which needs to in-
volve skeleton pruning for feature generation. More-
over, in (Bai et al., 2009), fused contour segment and
skeleton path achieved 96.6% classification rate, but
it is meaningless to compare it to our result since our
descriptor is isolated.
5.3 EM Classification
To validate the idea of our proposed method for ex-
isting application, we proved the applicability of our
new method to a real-world problem, namely the au-
tomatic classification of Environmental Microorgan-
isms (EMs). EMs and their species are very impor-
tant indicators to evaluate environmental quality, but
their manual classification is very time-consuming (Li
et al., 2013). Thus, automatic analysis techniques
Shape-basedObjectRetrievalandClassificationwithSupervisedOptimisation
209
Table 3: Object classification for the whole MPEG-7 dataset. SSDP represents the results of scaled datasets with default
parameters. Our Method achieves significant progress in this experiment.
1st 2nd 3rd 4th 5th 6th 7th 8th 9th 10th Average
SSDP(%) 47.6 45.6 50.7 47.6 46 44.4 46.4 46.0 45.9 44.9 46.5
Our Method(%)
85.7 86.0 85.9 85.7 84.1 86.6 85.1 87.7 87.9 88.0 86.3
Table 4: Experimental comparison of Shape Context descriptor to its fused descriptor with our method using the Kimia-216
and the MPEG-400 datasets as well as the proof of applicability of our approach to enhance the performance of existing shape
descriptors. Results are summarised as the number of shapes from the same class among the first top 1-10 shapes.
Retrieval Results for Kimia-216 1st 2nd 3rd 4th 5th 6th 7th 8th 9th 10th
Shape Context (Belongie et al., 2002) 216 212 201 187 186 175 171 164 162 146
Fused Method
216 214 207 204 201 204 191 188 192 185
Retrieval Results for MPEG-400 1st 2nd 3rd 4th 5th 6th 7th 8th 9th 10th
Shape Context (Belongie et al., 2002) 400 370 343 310 302 277 272 265 264 239
Fused Method
400 389 374 368 368 358 347 344 339 346
for microscopic images of EMs would be very ap-
preciated by environmental scientists. We have tested
our methodology for the application using the EM-
200 dataset. Since some EM-200 objects can hardly
be skeletonised (e.g., the first two objects in the
third row of Figure 2), Chen (Li et al., 2013) and
Cong (Yang et al., 2014a) proposed some methods us-
ing the whole microorganism contours for object de-
scription. Here we employ the same feature vector
proposed by Cong (Yang et al., 2014a), but classifiers
will be built with our optimised C and γ. The impres-
sive results for the EM-200 dataset (see Table 6) con-
firm the power of our supervised optimisation method
to real-world applications.
5.4 Feature Analysis
In this part, we will employ Discriminate Analysis
(DA) to evaluate the discriminating properties of the
feature space. Especially, we applied Fisher Lin-
ear Discriminant Analysis (Viola and Jones, 2004)
on MPEG-7 dataset and achieved the following re-
sults: λ(c
′
1
) = 0.250, λ(c
′
2
) = 0.147, λ(c
′
3
) = 0.237,
λ(c
′
4
) = 0.173, λ(c
′
5
) = 0.232, λ(c
′
6
) = 0.280, λ(c
′
7
) =
0.360, λ(c
′
8
) = 0.282, λ(c
′
9
) = 0.102, λ(c
′
10
) = 0.413
for the different dimensions of the feature space, re-
spectively. The value λ(c
′
i
) expresses the overall dis-
crimination power for the feature space dimension c
′
i
and is calculated as the ratio of the determinant of
intra-class covariance matrix to the determinant of
the total covariance matrix. The value of λ(c
′
i
) be-
longs to the range [0,1], whereas 0 corresponds to
perfect discriminativeproperties and 1 denotes no dis-
crimination. According to the analysis of the feature
Table 5: Experimental comparison of our methodology to
the related algorithm for classification on MPEG-7.
Method Score
Skeleton Path (Bai et al., 2009) 86.7%
CS (Sun and Super, 2005)
75.4%
IDSC (Ling and Jacobs, 2007) 76.5%
Our Method
86.3%
Table 6: Experimental comparison of our method to related
algorithms for classification of Microorganisms as the proof
of applicability of our optimisation approach to real world
problems using the EM-200 dataset. (MS: Manually Seg-
mented, SAS: Semi-Automatically Segmented).
Method MS SAS
SFSVM (Li et al., 2013) 89.7% 66.0%
NSFSVM (Yang et al., 2014a) 92.5% 79.5%
Our Method
95.0% 83.5%
space described above, the last feature c
′
9
possesses
the strongest discriminative power.
6 CONCLUSION
In this paper, we propose a simple and effective shape
descriptor that can be easily fused with other descrip-
tors. In order to make our descriptor more flexi-
ble and equip it with a higher adaptiveness, a super-
vised optimisation strategy is introduced. The pro-
posed method can easily adapt to a concrete appli-
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
210

cation domain by optimising parameters assigned to
different dimensions of the feature space and kernel
function. Its promising performance has been proven
in a meaningful experimental set-up. In the future, we
will investigate possibilities of fusing more meaning-
ful shape features into our feature space.
ACKNOWLEDGEMENTS
Research activities leading to this work have been
supported by the China Scholarship Council (CSC)
and the German Research Foundation within the Re-
search Training Group 1564 (GRK 1564). We greatly
thank M.Sc. Chen Li from University of Siegen and
Prof. Dr. Beihai Zhou and M.Sc. Fangshu Ma from
the University of Science and Technology Beijing for
providing us with Environmental Microorganism im-
age dataset for experiments.
REFERENCES
Bai, X. and Latecki, L. (2008). Path similarity skeleton
graph matching. PAMI, 30(7):1282–1292.
Bai, X., Latecki, L., and yu Liu, W. (2007). Skeleton prun-
ing by contour partitioning with discrete curve evolu-
tion. PAMI, 29(3):449–462.
Bai, X., Liu, W., and Tu, Z. (2009). Integrating contour and
skeleton for shape classification. In ICCV Workshops,
pages 360–367.
Bai, X., Yang, X., Latecki, L., Liu, W., and Tu, Z. (2010).
Learning context-sensitive shape similarity by graph
transduction. PAMI, 32(5):861–874.
Baseski, E., Erdem, A., and Tari, S. (2009). Dissimilar-
ity between two skeletal trees in a context. Pattern
Recognition, 42(3):370–385.
Belongie, S., Malik, J., and Puzicha, J. (2002). Shape
matching and object recognition using shape contexts.
PAMI, 24(4):509–522.
Cao, Y., Zhang, Z., Czogiel, I., Dryden, I., and Wang,
S. (2011). 2d nonrigid partial shape matching us-
ing mcmc and contour subdivision. In CVPR, pages
2345–2352.
Chang, M.-C. and Kimia, B. (2009). Measuring 3d shape
similarity by matching the medial scaffolds. In ICCV,
pages 1473–1480.
Del Bimbo, A. and Pala, P. (1997). Visual image retrieval by
elastic matching of user sketches. PAMI, 19(2):121–
132.
Donoser, M. and Bischof, H. (2013). Diffusion processes
for retrieval revisited. In CVPR, pages 1320–1327.
Goh, W.-B. (2008). Strategies for shape matching using
skeletons. CVIU, 110(3):326–345.
Hazewinkel, M. (2001). Chi-squared Distribution. Ency-
clopedia of Mathematics, Springer.
Hedrich, J., Yang, C., Feinen, C., Schaefer, S., Paulus, D.,
and Grzegorzek, M. (2013). Extended investigations
on skeleton graph matching for object recognition. In
ICCRS, pages 371–381. Springer LNCS.
Kirkpatrick, S., Gelatt, C. D., and Vecchi, M. P. (1983).
Optimization by simulated annealing. Science, pages
671–680.
Li, C., Shirahama, K., Grzegorzek, M., Ma, F., and Zhou,
B. (2013). Classification of environmental microor-
ganisms in microscopic images using shape features
and support vector machines. In ICIP, pages 2435–
2439. IEEE Computer Society.
Ling, H. and Jacobs, D. (2007). Shape classification using
the inner-distance. PAMI, 29(2):286–299.
Mmoli, F. (2007). On the use of gromov-hausdorff distances
for shape comparison. In SPBG, pages 81–90.
Nguyen, D. T., Ogunbona, P. O., and Li, W. (2013). A
novel shape-based non-redundant local binary pattern
descriptor for object detection. Pattern Recognition,
46(5):1485–1500.
Russell, S. and Norvig, P. (2009). Artificial Intelligence: A
Modern Approach. Prentice Hall Press, 3rd edition.
Sebastian, T. and Kimia, B. (2001). Curves vs skeletons in
object recognition. In ICIP, volume 3, pages 22–25.
Shotton, J., Blake, A., and Cipolla, R. (2005). Contour-
based learning for object detection. In ICCV, vol-
ume 1, pages 503–510.
Siddiqi, K., Shokoufandeh, A., Dickenson, S., and Zucker,
S. (1998). Shock graphs and shape matching. In
ICCV, pages 222–229.
Sun, K. and Super, B. (2005). Classification of contour
shapes using class segment sets. In CVPR 2005, vol-
ume 2, pages 727–733.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. Int. J. Comput. Vision, 57(2):137–154.
Yang, C., Li, C., Tiebe, O., Shirahama, K., and Grzegorzek,
M. (2014a). Shape-based classification of environ-
mental microorganisms. In ICPR, pages 3374–3379.
Yang, C., Tiebe, O., Pietsch, P., Feinen, C., Kelter, U., and
Grzegorzek, M. (2014b). Shape-based object retrieval
by contour segment matching. In ICIP, pages 2202–
2206.
Yang, X., Liu, H., and Latecki, L. J. (2012). Contour-based
object detection as dominant set computation. Pattern
Recognition, 45(5):1927–1936.
Zhang, D. and Lu, G. (2004). Review of shape representa-
tion and description techniques. Pattern Recognition,
37:1–19.
Shape-basedObjectRetrievalandClassificationwithSupervisedOptimisation
211
