
Aggregation of Descriptive Regularization and Fuzzy Logic Techniques
for Enhanced Remote Sensing Imaging
A. Castillo Atoche, O. Palma Marrufo and R. Peon Escalante
Facultad de Ingenieria, Universidad Autonoma de Yucatan, M´erida, Mexico
Keywords:
Remote Sensing, Parallel Computing, GPUs.
Abstract:
In this paper, the aggregation of the descriptive regularization and Fuzzy-Logic techniques is proposed for the
enhancement/reconstruction of the power spatial spectrum pattern (SSP) of the wave field scattered from re-
motely sensed scenes. In particular, the Weighted Constrain Least Square (WCLS) and the Fuzzy anisotropic
diffusion techniques are algorithmically adapted and implemented in a parallel fashion using commodity
graphic processor units (GPUs) improving the time performance of real-time remote sensing applications.
Experimental results show the performance efficiency both in resolution enhancement and in computational
complexity reduction metrics with the presented approach.
1 INTRODUCTION
Advances in sensor technology are revolutionizing
the way of images are collected, managed and pro-
cessed. The incorporation of latest-generation sen-
sors to radar/SAR systems is currently producing
a near-continual stream of high-dimensional image
data. Such amount of collected information is now
required to be processed in (near) real-time mode for
newer applications in Earth monitoring, in medical
image fusion and enhancement, and computer vision.
Relevant examples include monitoring of natural dis-
asters like earthquakes and floods, military applica-
tions, tracking of man-induced hazards, forest fires,
oil spills and other types of biological agents. Also,
these applications need timely responses for swift
decision which depend upon real-time performance
of algorithm implementation (Henderson and Lewis,
1998),(Chang, 2007), (Goodman et al., 2011), (Yu
et al., 2013). Additionally, the computational com-
plexity of the advanced high-resolution remote sens-
ing (RS) and radar imaging techniques that employ
the recently developed regularization methods for en-
hanced radar imaging and remote sensing (RS) image
reconstruction/ enhancement procedures (Shkvarko
et al., 2008),(Castillo Atoche et al., 2010), (Shkvarko,
2010) is definitively unacceptable for a (near) real-
time implementation with any existing digital sig-
nal processor (DSP) or high-speed personal computer
(PC). In this regard, a tremendous amount of data pro-
cessing is required to be computed for different type
of image processing algorithms. To provide such high
computational demands under (near) real-time con-
straints, highly parallel processing schemes must be
developed. Usually, general-purposesystems are used
like multi-PC’s, field programmable gate arrays (FP-
GAs) or digital signal processing (DSP) platforms.
Therefore, the implementation of the aggregated de-
scriptive regularization and fuzzy anisotropic diffu-
sion techniques via GPU computing for real-time data
processing is considered in this study.
The principal innovation that distinguishes our ap-
proach from previous studies (Paz and Plaza, 2010),
(Castillo Atoche et al., 2009), (Liu and Plaza, 2011)
is twofold: first, the conceptualization and algorith-
mically aggregation of the weighted constrained least
square (WCLS) algorithm with the fuzzy Anisotropic
Diffusion technique for image enhancement is em-
ployed. In this stage fuzzy edge detectors are in-
troduced in order to provide a more flexible and ro-
bust way to define the edges instead of using the
well-known Laplacian filter as the edge factor in the
anisotropic diffusion. The essential idea is to avoid
blurring of the edges, after the WCLS reconstruc-
tion, with the incorporation of an edge stopping func-
tion which estimates the diffusion coefficients ensur-
ing the smoothing process only in the interior re-
gions without crossing the edges. Second, the al-
gorithmic implementation using massively processors
with a graphic processing unit (GPU) platform is per-
formed. Here, parallel computing techniques are used
in order to improve the time performance of the algo-
193
Castillo Atoche A., Palma Marrufo O. and Peon Escalante R..
Aggregation of Descriptive Regularization and Fuzzy Logic Techniques for Enhanced Remote Sensing Imaging.
DOI: 10.5220/0005154301930198
In Proceedings of the International Conference on Fuzzy Computation Theory and Applications (FCTA-2014), pages 193-198
ISBN: 978-989-758-053-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

rithm. Simulation analysis and the performance eval-
uation with the NVIDIA Tesla C2075, are indicative
that our GPU-based implementation is also oriented
toward real-time remote sensing processing applica-
tions.
2 PROBLEM STATEMENT
In radar imaging (Henderson and Lewis, 1998), (Shk-
varko et al., 2008), the backscattered field of the re-
motely sensed surface X ∋ x is modeled by impos-
ing its time invariant complex scattering function e(x)
over the object scene X ∋ x. The measurement data
wavefield u(y) = s(y) + n(y) consists of echo signals
s and additive noise n, and is available for observa-
tions and recordings within the prescribed time-space
observation domain Y = T ×P, where y = (t,p)
T
de-
fines the time-space points in Y. The model of the
observation wavefield u is defined by specifying the
stochastic equation of observation (EO) of an opera-
tor form: u = Se + n;e ∈ E;u,n ∈ U;S : E → U, in
the Gilbert signal spaces E and U with the metric
structures induced by the inner products [u
1
,u
2
]
U
and
[e
1
,e
2
]
E
, respectively.
All the fields e,n,u are assumed to be zero-mean
complex valued Gaussian random fields. An incoher-
ent nature of the backscattered field e(x) is next as-
sumed, this is naturally inherent to the radar imaging
experiments (Henderson and Lewis, 1998), (Shkvarko
et al., 2008) and leads to the δ-form of the object field
correlation function, R
e
(x
1
,x
2
) = B(x
1
)δ(x
1
− x
2
),
where e(x) and B(x) =< |e(x)|
2
> are referred to as
a random complex scattering function of the probing
surface and its average power scattering function or
spatial spectrum pattern (SSP), respectively.
Next, the conventional finite-dimensional vector
form approximation (Castillo Atoche et al., 2010) of
the continuous-form EO is taked into account as fol-
lows
u = Se+ n (1)
where u,n and e define the vectors composed by
the coefficients of the finite-dimensional approxi-
mation of the fields u,n and e, respectively, and
S is the matrix-form approximation of the sig-
nal formation operator (SFO). The average b =
vect
< e
k
,e
∗
k
>;k = 1,...,K
of the random scatter-
ing vector e has a statistical meaning of the average
power scattering function traditionally referred as the
spatial spectrum pattern (SSP), where the asterisk in-
dicates the complex conjugate. This SSP is a second
order statistics of the scattered field that represent the
brightness reflectivity of the image scene B = L{b},
represented in a conventional pixel format over the
rectangular scene frame (Shkvarko et al., 2008).
The RS imaging problem is stated as follows: to
find an estimate of the scene pixel-frame image
ˆ
B
via lexicographical reordering
ˆ
B =L{
ˆ
b} of the spa-
tial spectrum pattern (SSP) vector estimate
ˆ
b recon-
structed from whatever available measurements of
independent realizations {u
( j)
; j = 1,.. .,J} of the
recorded data vector.
3 DESCRIPTIVE
REGULARIZATION STRATEGY
In this section, vector
ˆ
b is estimated as a discrete-
form representation of the desired SSP over the pixel-
formatted object scene remotely sensed with an em-
ployed array radar/SAR. Thus, one can seek to esti-
mate
ˆ
b = {
ˆ
R
e
}
diag
given the data correlation matrix
R
u
pre-estimated by some means, e.g. via averaging
the correlations over L independent snapshots (Shk-
varko, 2010), (Castillo Atoche et al., 2009);
ˆ
R
u
= Y
= (1/L)
∑
L
l=1
u
(l)
u
+
(l)
, and by determining the solution
operator that we also refer to as the signal image for-
mation operator (SO) W such that
ˆ
b = {
ˆ
R
e
}
diag
= {WYW
+
}
diag
. (2)
To optimize the search of W, the following de-
scriptive regularization strategy is proposed
W −→
min
W
{ℜ(W)} (3)
where
ℜ(W) = tr{(WS− I)A(WS− I)
+
} +
αtr{WR
N
W
+
} (4)
implies the minimization of a weighted sum of the
systematic and fluctuation errors in the desired esti-
mate
ˆ
b, where the selection (adjustment) of the regu-
larization parameter α and the weight matrix A pro-
vides the additional degrees of freedom incorporating
any descriptive properties of a solution if those are
known a priori (Shkvarko et al., 2008).
Solving the minimization problem of (3), we ob-
tain
W = K
A,α
S
+
R
−1
N
, (5)
where
K
A,α
= (S
+
R
−1
N
S+ αA
−1
)
−1
(6)
and the desired SSP estimate is given by
ˆ
b = {K
A,α
S
+
R
−1
N
YR
−1
N
SK
A,α
}
diag
. (7)
In the case of white noise, R
−1
N
= (1/N
o
)I is consid-
ered. Thus, for the case of the proposed weighted
FCTA2014-InternationalConferenceonFuzzyComputationTheoryandApplications
194

constrained least square (WCLS) algorithm, a mod-
ified version of (7) is determined. The following re-
adjustments of the degrees of freedom are employed
A = M
B
and α = N
o
/b
o
. Therefore, the WCLS esti-
mator is represented as follows
W
WCLS
= (S
+
R
−1
N
S+ αM
B
)
−1
S
+
R
−1
N
. (8)
Any other feasible adjustments in the degrees of free-
dom (the regularization parameter α, and the weight
matrix A) provide other possible SSP reconstruction
techniques that are not considered in this study.
4 AGGREGATION OF FUZZY
ANISOTROPIC DIFFUSION
TECHNIQUE
In this section, the aggregation of fuzzy anisotropic
diffusion technique is incorporated for the enhaced of
remote sensing imaging. First, the diffusion process-
ing technique is considered as the result of convolv-
ing the reconstructed remotely sensed image
ˆ
b
o
with
a Gaussian kernel G of increasing width as follows
ˆ
b(x,y,t) =
ˆ
b
o
(x,y) ∗ G(x,y,t). (9)
Here, (9) acts as a low-pass filter suppressing high fre-
quencies in the image
ˆ
b. The problem is that the im-
age edges and noises are both high frequency signals,
and therefore, the edges are blurred by this operation.
To solve this problem, the anisotropic diffusion equa-
tion proposed in (Song and Tizhoosh, 2003) is next
defined as
∂
ˆ
b
(r;t)
∂t
= div(c(r;t)∇
ˆ
b(r;t)), (10)
where R ∋ r = (x,y) for the continuous 2-D rectan-
gular scene frame, c(r;t) = g(
∇
ˆ
b(r;t)
) is the dif-
fusion coefficient where g(·) is called edge stopping
function, ∇
ˆ
b is the gradient of the image and
∂
ˆ
b
(r;t)
∂t
represents the enhanced SSP estimate
ˆ
b(r;t) which
provides edge preservation in the scene regions with
high gradient contrast while performing smoothed
windowing over the homogeneous image zones cor-
rupted by Gaussian noise.
Now, the discrete version of the anisotropic diffu-
sion equation of (10) is represented as
ˆ
b
[i+1]
r
=
ˆ
b
[i]
s
+ λ
1
d
2
x
· c
N
· D
N
(
ˆ
b) +
1
d
2
x
· c
S
· D
S
(
ˆ
b)+
1
d
2
y
· c
E
· D
E
(
ˆ
b) +
1
d
2
y
· c
W
· D
W
(
ˆ
b) +
1
d
2
d
· c
NE
· D
NE
(
ˆ
b) +
1
d
2
d
· c
NW
· D
NW
(
ˆ
b) +
1
d
2
d
· c
SE
· D
SE
(
ˆ
b) +
1
d
2
d
· c
SW
· D
SW
(
ˆ
b)
[i]
r
(11)
where c
N
, c
S
, c
E
, c
W
, c
NE
, c
NW
, c
SE
, c
SW
represents
the conduction coefficients, d
x
,d
y
,d
d
are the distance
between pixels and D
N
, D
S
, D
E
, D
W
, D
NE
, D
SE
, D
NW
,
D
SW
indicates the nearest-neighbour differences for
the corresponding direction.
In this paper, the conduction coefficients are cal-
culated as follows
c
x
=
1
1+
D
x
K
2
. (12)
The parameter K in (12) is chosen according to the
noise level and the edge strength. In any remote
sensing system, the noise level is not known a priori
with certainty (Henderson and Lewis, 1998). Further-
more, because of inherent noise, the calculated edge
strength based on gradient is not a true reflection of
the edge strength. Therefore, the ambiguity of choos-
ing a suitable value for parameter K, and thus, the un-
certainty in the diffusion coefficient justifies the use
of fuzzy set theory in such situations.
In this regard, each nearest-neighbor differences
D
x
, that define the edge factor algorithmically same
as Laplacian Filter in each direction in the traditional
Perona-Malik anisotropic diffussion algorithm, is re-
placed by a Fuzzy Logic Set (FLS) that calculates the
edges in order to avoid the noise of the remote sensing
images. The following fuzzy rules are defined
The proposed fuzzy anisotropic diffusion ap-
proach is next defined as
ˆ
b
[i+1]
r
=
ˆ
b
[i]
r
+ λ
1
d
2
x
· c
N
· ϒ
N
(
ˆ
b) +
1
d
2
x
· c
S
· ϒ
S
(
ˆ
b)+
1
d
2
y
· c
E
· ϒ
E
(
ˆ
b) +
1
d
2
y
· c
W
· ϒ
W
(
ˆ
b) +
1
d
2
d
· c
NE
· ϒ
NE
(
ˆ
b) +
1
d
2
d
· c
NW
· ϒ
NW
(
ˆ
b) +
1
d
2
d
· c
SE
· ϒ
SE
(
ˆ
b) +
1
d
2
d
· c
SW
· ϒ
SW
(
ˆ
b)
[i]
r
(13)
where ϒ
x
represents the edge in each direction using
a centroid deffuzifier. Now, the design is ready to im-
plement the Fuzzy Anisotrpic Diffusion in the GPU
platform.
AggregationofDescriptiveRegularizationandFuzzyLogicTechniquesforEnhancedRemoteSensingImaging
195

Table 1: Proposed Fuzzy rules.
R
1
IF
{D
NW
and
D
N
and
D
NE
}
are Zero
then
{Black}
Else
{White},
R
2
IF
{D
SW
and
D
S
and
D
SE
}
are Zero
then
{Black}
Else
{White},
R
3
IF
{D
NE
and
D
E
and
D
SE
}
are Zero
then
{Black}
Else
{White},
R
4
IF
{D
NW
and
D
W
and
D
SW
}
are Zero
then
{Black}
Else
{White},
R
5
IF
{D
N
and
D
NE
and
D
E
}
are Zero
then
{Black}
Else
{White},
R
6
IF
{D
N
and
D
NW
and
D
W
}
are Zero
then
{Black}
Else
{White},
R
7
IF
{D
E
and
D
SE
and
D
S
}
are Zero
then
{Black}
Else
{White},
R
8
IF
{D
W
and
D
SW
and
D
S
}
are Zero
then
{Black}
Else
{White}.
5 GPU IMPLEMENTATION
In this section, the GPU-based implementation of the
aggregated WCLS-Fuzzy anisotropic diffusion algo-
rithm is developed. Figure 1 illustrates the flowchart
of the proposed system describing the methodology
for enhancement of remote sensing imaging. The
multicore architecture of the GPU and the employe-
ment of textures memories for high-speedaccess were
taked into account in the design. In this study, CUDA
kernels were used, which are subroutines callable
from the host that execute on the CUDA device. That
is, an extern function is called from the host and it
calls the different kernels. A kernel employ many
threads to perform the specific operation defined in
the kernel source code. Moreover, the kernel should
make partitions of the data to be processed by each
thread, taking care of not overlap threads processing
on any memory section in order to avoid undesired
Figure 1: Flowchart describing the methodology adopted
for the development of the system.
results. Three different types of data partitioning are
identified for image processing: spectral, spatial and
mixed, as illustrated in Figure 1. Considering the
analysis of the previous WCLS and Fuzzy anisotropic
diffusion algoritms, the spatial partition is selected in
order to improve the parallelism in the design.
Now, the computational procedures for the imple-
mentation of the WCLS reconstructive algorithms are
described. First, the device overlap function was ac-
tivated with the capacity to simultaneously execute a
CUDA kernel while performing a copy between CPU
to GPU memory (Sanders and Kandrot, 2011). Mul-
tiple CUDA streams are created to perform this over-
lap of computation in data transfer. In addition, the
memory configuration management using the mmap
library of GNU C is employed. Second, the matrix
operations of the WCLS algorithm are computed. A
specific CUDA kernel is implemented using one grid
of n× m blocks, in which each block process the cor-
responding sub-matrix operation in a parallel scheme,
and the results are loaded in the shared memory of
the GPU. The reduction algorithm is proposed for the
implementation of several addition operations in this
stage.
For the aggregation of the Fuzzy anisotropic dif-
fusion, a triangular membership function define the
fuzzy sets. The Fuzzy sets are initialized using the tri-
angular membership function with the following val-
ues, White = 147, Black = 107 and Zero = 5. These
Fuzzy sets are allocated in the GPU memory, and the
use of NPP library is considered, which optimize the
functions that work on 1-D and 2-D arrays.
Next, the extern function PeronaMalik is called
from host, it binds the texture to array, calls the Fuzzy
kernel for image enhancenment and normalize the
resulting array using optimized Nvidia Performace
Primitives, i,e., the nppsMinMax32f to get the min-
imum and maximum float value resulting form the
Fuzzy kernel, and nppsNormalize32f to normalize the
image with resulting minimum value at 0 and maxi-
mum at 255.
Summarizing, each thread apply the fuzzy rules,
deffuzifies the fuzzy set and compute the values for
the fuzzy anisotropic diffusion. The fuzzy rules are
implemented in the form of minimum function for the
conditional part of the rule. The fuzzy sets Black and
White are implemented also as minimum functions.
Figure 2: Types of image data partitioning: (a) spectral, (b)
spatial and (c) mixed.
FCTA2014-InternationalConferenceonFuzzyComputationTheoryandApplications
196
Afterwards, the fuzzy sets are defuzzified computing
the centroid of them. Finally, the resulting scalar is
used on the fuzzy anisotropic diffusion equations.
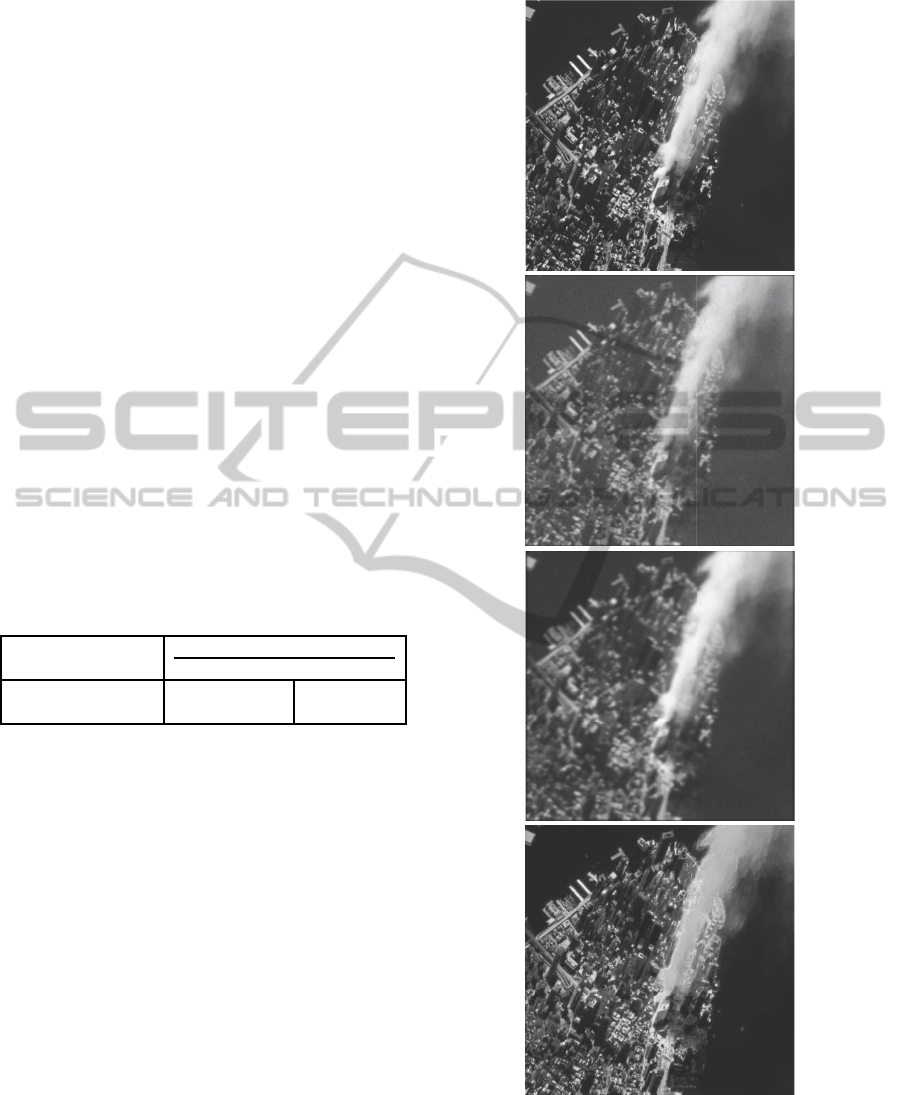
6 SIMULATIONS AND
PERFORMANCE ANALYSIS
In order to demonstrate the image enhancement with
the proposed approach towards real-time processing,
the following simulation experiments are conducted
using a real-world satellite image. The tested scene
is shown in Fig. 3(a). In the reported simulations,
the case of white observation noise (Henderson and
Lewis, 1998) is considered with SNR of 20 dB as
shown in Fig. 3(b). Fig. 3(c) presents the image en-
hancement using the Perona-Malik anisotropic diffu-
sion method and Fig. 3(d) shows the image enhance-
ment with the proposed WCLS-fuzzy anisotropic dif-
fusion method.
In the presented performance analysis, the pro-
posed algorithm was implemented in the CPU quad
core Intel Xeon E5603 at 1.6 GHz and in the NVIDIA
Tesla C2075 GPU plattform as well. The results of
such comparative analysis are shown in Table 1.
Table 2: Processing time comparative.
Image size (pixels)
Time processing (seconds)
CPU GPU
512 x 512
1024 x 1024
14.83 0.95
43.24
1.75
In this regard, the time performance of the pro-
posed algorithm againts the C++ reference implemen-
tation have been compared.
Having analyzed Table 1, it is possible to note
that the processing time required for the WCLS-fuzzy
anisotropic diffusion algorithm implementation has
been significatively reduced using GPUs. Such GPU
implementation requires 1.75 sec for a 1024 x 1024
pixel-format image instead of the 43.24 secs required
using the C++ implementation.
Then, the processing time of the proposed GPU
based algorithm is about 27 times less than the con-
ventional CPU implementation.
7 CONCLUSIONS
The principal result of this study relates to the
GPU-based implementation of the aggregated deter-
ministic regularization and Fuzzy-Logic techniques
oriented for high-resolution enhanced of remotely
sensed imaging. We have examined that pursuing
(a)
(b)
(c)
(d)
Figure 3: Implementation results: (a) original real-world
test scene; (b) degraded scene image formed applying the
Matched Space Filter method; (c) image reconstructed ap-
plying the WCLS algorithm (4.57 dB); (d) image ehanced
applying the WCLS-Fuzzy Anisotropic Diffusion algorithm
(9.76 dB).
AggregationofDescriptiveRegularizationandFuzzyLogicTechniquesforEnhancedRemoteSensingImaging
197

the proposed GPU computing implementation, the
sub-tasks of the WCLS and the Fuzzy-Anisotropic
diffusion algorithms can be algorithmically properly
adapted in computationally efficient parallel represen-
tation towards real-time remote sensing applications.
The efficiency of the GPU-based implementation ap-
proach was verified with a real test-case scenario in
which the time performance of the algorithm was sub-
stantially reduced up to 27 orders.
ACKNOWLEDGEMENTS
This study was supported by Programa de Mejo-
ramiento del Profesorado (PROMEP) and Consejo
Nacional de Ciencia y Tecnolog´ıa (CONACYT) un-
der grants UADY-CA-84 and CB-2010-01-158136,
respectively. The authors wish to thank Eduardo Es-
cobar Aquino for his support in running the proposed
experiments.
REFERENCES
Castillo Atoche, A., Shkvarko, Y., Torres Roman, D., and
Perez Meana, H. (2009). Convex regularization-based
hardware/software co-design for real-time enhance-
ment of remote sensing imagery. Journal of Real-Time
Image Processing, 4(3):261–272.
Castillo Atoche, A., Torres Roman, D., and Shkvarko,
Y. (2010). Experiment design regularization-based
hardware/software codesign for real-time enhanced
imaging in uncertain remote sensing environment.
EURASIP Journal on Advances in Signal Processing,
2010:10.
Chang, C.-I. (2007). Hyperspectral data exploitation: the-
ory and applications. Wiley-Interscience.
Goodman, J. A., Kaeli, D., and Schaa, D. (2011). Accelerat-
ing an imaging spectroscopy algorithm for submerged
marine environments using graphics processing units.
Selected Topics in Applied Earth Observations and
Remote Sensing, IEEE Journal of, 4(3):669–6762.
Henderson, F. M. and Lewis, A. J. (1998). Principles and
applications of imaging radar. Manual of remote sens-
ing. John Wiley and sons, 3rd edition.
Liu, F., S. F. J. and Plaza, A. (2011). Parallel hyperspectral
image processing on distributed multicluster systems.
Journal of Applied Remote Sensing, 5(1).
Paz, A. and Plaza, A. (2010). Clusters versus gpus for paral-
lel target and anomaly detection in hyperspectral im-
ages. EURASIP J. Adv. Signal Process, 2010:1–18.
Sanders, J. and Kandrot, E. (2011). CUDA by Example:An
Introduction to General-Purpose GPU Programming.
Addison-Wesley Professional, 1st edition.
Shkvarko, Y., Perez-Meana, and Castillo Atoche, A.
(2008). Enhanced radar imaging in uncertain environ-
ment: a descriptive experiment design regularization
paradigm. International Journal of Navigation and
Observation, 8:11.
Shkvarko, Y. V. (2010). Unifying experiment design and
convex regularization techniques for enhanced imag-
ing with uncertain remote sensing data; part i: Theory.
Geoscience and Remote Sensing, IEEE Transactions
on, 48(1):82–95.
Song, J. and Tizhoosh, H. R. (2003). Fuzzy anisotropic
diffusion: A rule based approach. World Multicon-
ference on Systemics, Cyebernetics and Informatics,
pages 241–246.
Yu, J., Liu, A., Yang, Y., and Zhao, Y. (2013). Analysis
of sea ice motion and deformation using amsr-e data
from 2005 to 2007. International Journal of Remote
Sensing, 34(12):4127–4141.
FCTA2014-InternationalConferenceonFuzzyComputationTheoryandApplications
198
