
A Robust Real-time Image Algorithm for Moving Target Detection from
Unmanned Aerial Vehicles (UAV)
Mathieu Pouzet
1,2
, Patrick Bonnin
1,2
, Jean Laneurit
1
and Cedric Tessier
1
1
Effidence, Clermont-Ferrand, France
2
LISV, Versailles, France
Keywords:
Aerial Imagery, Moving Target Detection, Registration, Spatio-temporal Trajectories.
Abstract:
We propose a real time method for moving target detection from a camera embedded on a UAV. As the camera
is moving, we must estimate the background motion in order to compensate it and then perform the moving
target detection. This compensation is realized by an image registration method. For this, we use an hybrid
method using global minimization and feature-based approaches, with a pyramidal implementation. The good
results obtained for registration give us the potential moving targets. As some wrong detections still appear,
due to noise, occlusions or local change of illuminations, we worked on a robust spatio-temporal tracker able
to decide if potential targets are real moving targets or not. The algorithm must reach real time performances
for VGA images at 30 fps with a standard PC. We have tested our method on different sequences and show the
good results obtained thanks to the high precision in the image registration and the spatio-temporal tracker.
1 INTRODUCTION
Among the goals of video surveillance, one is the de-
tection and tracking of all the moving targets in the
scene. This is a very difficult task, even more when
the camera is moving and that moving targets are dif-
ficult to characterize (possible low speed, small size,
low contrast ...), as in aerial surveillance scenarios.
Possible applications are highway or border surveil-
lance.
This paper focuses on the Moving Target Detec-
tion (MTD) problem from UAV. The targets are mov-
ing with a low speed and the images taken from the
camera embedded on the UAV suffer from an impor-
tant and irregular movement. Our main objective is to
highlight the pixels belonging to the targets of the cur-
rent image that do not match with the background mo-
tion. This latter may be very high compare to the tar-
get motion. We do not want to miss small targets with
low speed and contrast. It is why background motion
estimation with a high accuracy is needed. But we
do not forget that target motion may deteriorate the
quality of the background motion estimation.
As spurious detections may appear, we propose a
second step of filtering realized by a tracker, keeping
only moving targets with a spatio-temporal coherent
motion. It is able to track with occlusions during a
few images The result is given under the form of a
Ground Moving Target Indicator (GMTI) map.
In the following of the paper, we first present a
state of the art about moving target detection from
UAV (sec. 2). Then we propose the outline of the
method (sec. 3), and its details : the image registra-
tion (sec. 4) and the moving target detection (sec. 5).
Finally, we will evaluate our method on simulated and
real image sequences (sec. 6) and conclude (sec. 7).
2 RELATED WORK
Lots of approaches have been proposed to address the
MTD problem in airborne video analysis. Some algo-
rithms use interest points in image, that have to be la-
belled as static or dynamic(Richard Evans, 2007)(Co-
hen and Medioni, 1998) (Rodrguez-Canosa et al.,
2012). This approach is the same as we can find in
SLAMMOT (Simultaneous Localization And Map-
ping With Moving Objects Tracking) systems(chih
Wang et al., 2004) (Migliore et al., 2009). The main
problem of this technique is the fact that features may
not be present on moving targets to be tracked, and
especially if their size is small and if they have a low
contrast with the background.
It is why we prefer to adopt a “kind of”
1
im-
1
Output of M-Estimator (sec. 4.3.2)
266
Pouzet M., Bonnin P., Laneurit J. and Tessier C..
A Robust Real-time Image Algorithm for Moving Target Detection from Unmanned Aerial Vehicles (UAV).
DOI: 10.5220/0005052802660273
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 266-273
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
age subtraction approach after a global background
motion compensation. Assuming that pixels intensi-
ties do not vary between two consecutive frames, the
method consists in applying a threshold to the differ-
ence of the registered images to label pixels as moving
or not(Irani and Anandan, 1998)(Ali and Shah, 2005).
This technique allows for detecting much more mov-
ing targets than feature-matching based approach.
To create robust map, it is important to take spatio-
temporal coherency into account. It is why (Odobez
and Bouthemy, 1997)(Crivelli et al., 2011) use spatio-
temporal Markov Random Field (MRF) to create a
statitiscal labelling. We tested it : segmentation re-
sults are good but the tuning of parameters is too crit-
ical for our application.
In order to obtain a better segmentation of mov-
ing targets, some authors propose to create a mozaic
image representation of the background. As moving
targets do not have to be included in the mozaic, a
background model is created with the median of im-
ages (Reilly et al., 2010) or mode (Lin et al., 2011),
i.e most frequent value in a sample. For computa-
tion time reason, the GPU is used. About the tracking
method, moving targets are associated into tracklets
(Lin et al., 2011) linked by their appearance, needing
targets to contain enough information to be tracked
correctly, that is not always our case.
Our main contribution is the proposal of a robust
real-time MTD algorithm, working in various cases,
even for feature-less images or large camera motion.
It works even if the targets have a small size or a very
low contrast with the background.
3 OUTLINE OF THE METHOD
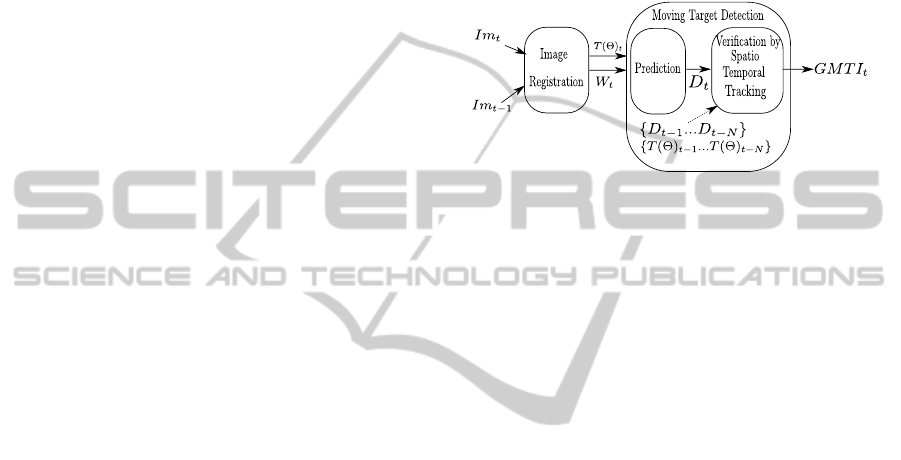
Our method is composed of two main steps (see Fig.1)
:
• Registration of two consecutive images,
• Moving Target Detection (MTD) :
– Prediction (using two consecutive images): po-
tential target detection D
t
by gathering pixels
whose motion differ from background motion,
– Validation (using N previous potential targets
{D
t−1
...D
t−N
} from N previous images): true
target detection by filtering with a spatio-
temporal tracker
The outputs of the image registration step are :
• the global transformation T (Θ) (ie. its parame-
ters) ,
• the weight image of M-Estimator W , indicating
the moving target pixels.
Generally, moving targets are detected by a high
threshold value on difference between registered im-
ages : that eliminates potential moving targets with
low contrast with background. Here, the results
are obtained using an M-Estimator (Prediction step),
adapting the threshold according to the camera noise,
followed by a tracker (Validation step). This one is
able to follow different kinds of targets, even 3 × 3
pixels (sec. 5.2).
Figure 1: Overall method scheme of Ground Moving Target
Indicator (GMTI) using two images at time t and t − 1. D
t
means potential detected targets at time t.
4 IMAGE REGISTRATION
Our objective is to find the transformation T (Θ) able
to register an image A in the reference frame of the
reference image B. Given the medium-altitude of the
UAV and therefore our constraint of planarity, the
transformation to estimate is a similarity (Hartley and
Zisserman, 2004), composed of an homothety of ra-
tio s, a rotation of angle θ, and a translation of vector
t
u
,t
v
T
. defined as :
u, v,1
T
A
= T (Θ)
u, v,1
T
B
with
T (Θ) =
s cosθ −s sinθ t
u
s sinθ s cosθ t
v
0 0 1
and with parameters vector Θ =
s, θ, t
u
,t
v
T
. The
function W that maps pixels X of image A in the
frame of image B by the use of transformation T (Θ)
is called a warping function and is such as :
W (Θ, X) = I(T (Θ), X)
with I a bilinear interpolation function.
Two main approaches could be considered for im-
age registration: the global methods (sec. 4.1) using a
similarity criteria (e.g pixel intensity) between the two
images and the geometric methods (sec. 4.2) using the
matching of static features (edges, interest points ...)
found in the two images.
ARobustReal-timeImageAlgorithmforMovingTargetDetectionfromUnmannedAerialVehicles(UAV)
267

4.1 Global Methods
These methods estimate the transformation by mini-
mizing or maximizing a criteria (difference of pixel
intensity, entropy ...) between each image A and B.
The objective is to iteratively get a warped version of
image A that corresponds to the reference image B.
This could be done by splitting the image in regions
(to get the optical flow for instance,(yves Bouguet,
2000)) or more globally by warping the whole im-
age ( (Odobez and Bouthemy, 1997) (Benhimane and
Malis, 2004),(Dame and Marchand, 2012)(Zitov and
Flusser, 2003)...).
To estimate T (Θ), classical minimization tech-
niques proceed in an iterative way, with a first pro-
posed estimation (for initialization) T (
ˆ
Θ) = Id, and
then by progressively estimating the transformation.
By knowing that a multiplication of similarities is
still a similarity, at each iteration we get : T (
ˆ
Θ) =
T (
ˆ
Θ)T (∆
Θ
) with ∆
Θ
the parameters variation for a
given iteration. At convergence, when
k
∆
Θ
k
tends to
0 , we get : T (Θ) = T (
ˆ
Θ). ∆
Θ
must be calculated to
iteratively estimate T (Θ).
If we note
A and B the vectors respectively con-
taining the pixels intensity of image A and B after gray
conversion, and ε(∆
Θ
) = B − A(W (
ˆ
Θ, W (∆
Θ
, X )))),
the cost function can be written as :
f (∆
Θ
) =
1
2
k
ε(∆
Θ
))
k
2
In literature, Gauss-Newton is the most
consistently-used method in image processing
(KLT Lucas-Kanade (Baker and Matthews, 2002),
(yves Bouguet, 2000)). It works perfectly in major
cases. To answer our constraint of low-computation
time, we prefered the more recent method developed
by (Benhimane and Malis, 2004), named ESM
(Efficient Second order Minimization).
This methods allows us to estimate T (Θ) by the
calculation of ∆
Θ
such as :
∆
Θ
= −(J
T
esm
J
esm
)
−1
J
T
esm
ε(0) (see Details in (Ben-
himane and Malis, 2004)).
This method is not sensitive to the initial seg-
mentation quality,contrarily to the geometric method.
Its main drawback is its uncapacity to estimate large
movements as this is a local technique.
4.2 Geometric Feature-based Methods
The objective of these methods is to segment the
images in interest points (Harris and Stephens,
1988)(Smith and Brady, 1995)(Lowe, 2004)(Bay
et al., 2008), edges (de Cabrol et al., 2005) or regions
(A.Goshtasby, 1986)(K.Poornima, 2012)(de Cabrol
et al., 2005). Then it aims at matching these data be-
tween the two images in order to calculate their mo-
tion.
The main advantages are a low algorithmic com-
plexity due to the low number of information to be
extracted and the possibility to estimate large move-
ments of the camera. But the drawback is the neces-
sity to extract a sufficient number of primitives with a
good distribution in the image. Most of time, it results
in a lower motion estimation precision than with the
use of the global method because it uses only a part
of the image information.
Regarding the complementarity of these two ap-
proaches lead us to the choice of an hybrid method
detailed below.
4.3 Proposed Image Registration
Method
4.3.1 Robustness to Large Camera Movements
ESM is a local technique, only authorizing small mo-
tion between images. This constraint can be mini-
mized using a pyramidal implementation. For a VGA
image, a 3 levels pyramid is used, with a gaussian fil-
ter of window 5 × 5: level L
2
: 160 × 120, level L
1
:
320 × 240, level L
0
: 640 × 480.
However, it is not sufficient for certain of our
applications. A second way to minimize this con-
straint is necessary. It consists in coupling the pyrami-
dal ESM with a feature-matching based motion esti-
mation algorithm. Among a lot of feature-matching
based methods ((Harris and Stephens, 1988)(Smith
and Brady, 1995)(Lowe, 2004)(Bay et al., 2008)), we
choose a simple interest points matching technique by
Harris corners (Harris and Stephens, 1988) and cor-
relation. For computation constraint, corners found in
image A has only to be matched with corners of image
B.
This method is both able to estimate large move-
ments and is a quick method. However, it is not able
to give a transformation precise enough for our MTD
application : Harris corners being not stable enough
to rotation and scale. Moreover, nothing can guaran-
tee us that a sufficient number of interest cornes will
be found in the image. Therefore an hybrid algorithm
is used to initialize the ESM in case of large move-
ments by giving to it a first guessed estimation at a
lower pyramid level.
4.3.2 Robustness to Noise, Moving Targets and
Occlusions
Both approaches for image registration do not give a
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
268

correct transformation estimation in presence of
noise, occlusions, moving targets in the image that do
not respect the global motion of the camera ... It is
why we need to robustify these approaches with ro-
bust estimators.
Therefore an M-estimator is used at each ESM it-
eration to modify the weight of each pixel in the final
calculation. This estimator is recommended by (Malis
and Marchand, 2006)(Klose et al., 2013)(Odobez and
Bouthemy, 1997) for robust estimation in real-time vi-
sion. This is a very good way in order not to take into
account the moving targets in the image, that would
deteriorate the global transformation estimation.
It is why for our application, we will use the
weight function w as defined by (Huber et al., 1981) :
w(x, y) = 1 si ε
N
(x, y) ≤ C
w(x, y) =
C
ε
N
(x,y)
si ε
N
(x, y) > C
with
• ε
N
(x, y) =
|ε(x,y)−med(ε(x,y))|
σ
,
• σ = 1.4826 MAD, MAD = med(|ε(x, y) −
med(ε(x, y))|) the “Median Absolute Deviation”,
• C = 1.345 the constant allowing to get a 95%
asymptotic efficiency.
These weights w are calculated at each ESM iter-
ation such as : ∆
Θ
= −(J
T
esm
W J
esm
)
−1
J
T
esm
W ε(0) with
W the diagonal weight matrix for each pixel.
About feature-based algorithm, we use a modified
version of RANSAC algorithm (Fischler and Bolles,
1981) to reject the outliers. This version allows to
deal with multi-hypotheses matchings. Rather than
taking into account only the best match for a pair of
interest point (one in each image) based on correlation
criteria, several matches are considered.
Therefore, at each iteration, RANSAC draws an
hypothetic match following a cumulative uniform dis-
tribution based on correlation scores. Higher is the
correlation score between a pair of interest points (one
of each image), better is the chance for this corner to
be drawn.
To meet computation time constraint, the search
for matchings is not performed in the whole image
but in an area whose the size is dependent on the es-
timated motion and its covariance, given from a level
of the pyramid to another one.
4.3.3 Image Registration Algorithm
The proposed algorithm is an hybrid system (see
Fig.2), implemented in a pyramidal way.
Images A and B are the inputs of the system. Be-
tween two pyramid levels, a scaling function allows
to compute the transformation of an upper level into
the reference frame of a lower level. The output of
the system is T = T
L
0
, the desired transformation
between images A and B. At level L
N
, the ESM-
Mestimator gives an estimation of the transforma-
tion and a confidence coefficient Con f
ESM
is calcu-
lated. This coefficient is obtained by a ZNCC (Zero-
mean Normalized Cross-Correlation) weighted by the
M-Estimator weights W
ESM
. About the algorithmic
control, if this coefficient is not above a threshold
(Con f
ESM
≤ τ), the ESM is replaced by a movement
estimator using the interest corners matching. This
coefficient is then estimated in function of the inliers
(points that respect the global motion model) given by
the RANSAC algorithm and the quality of the match-
ing. Indeed, the use of a ZNCC is not possible in
this second case because it would not be weighted and
then erronated because of the outliers (points that do
not respect the global motion model). If the geomet-
ric approach did not perform well, then the output is
T
L
N
=
ˆ
T
L
N
(equal to input).
With this coupling, we get both the advantages of
the global and geometric approaches. It gives to our
method robustness against large movements, against
moving targets and occlusions , high precision and a
low computation time. Moreover, the auto-evaluation
system(Bonnin et al., ) allows the evaluation of the
estimated transformation confidence.
(Ladikos et al., 2007) also use such an hybrid sys-
tem. Main differences are the fact that they use sepa-
rately the two approaches in a different state of their
FSM (Finite State Machine) whilst our proposed sys-
tem combine the two approaches at each level of the
pyramid in a same process. Moreover, they use NCC
to validate the results whereas we prefer a WZNCC
(Weighted ZNCC) to be robust to occlusions and
noise by using the weights of the M-Estimator.
5 MOVING TARGET DETECTION
5.1 Prediction using Blob Detection
The weight image W
t
, output of the image registration
step, is segmented using a blob detection ((Rosenfeld
and Pfaltz, 1966)). It returns potential moving targets.
Information of sizes and centroids of targets are used
for the verification step.
5.2 Verification with Robust
Spatio-temporal Tracking
Main Objective. The use of information coming
from two consecutive images is not enough for a ro-
bust tracking. It only allows to detect potential targets,
ARobustReal-timeImageAlgorithmforMovingTargetDetectionfromUnmannedAerialVehicles(UAV)
269
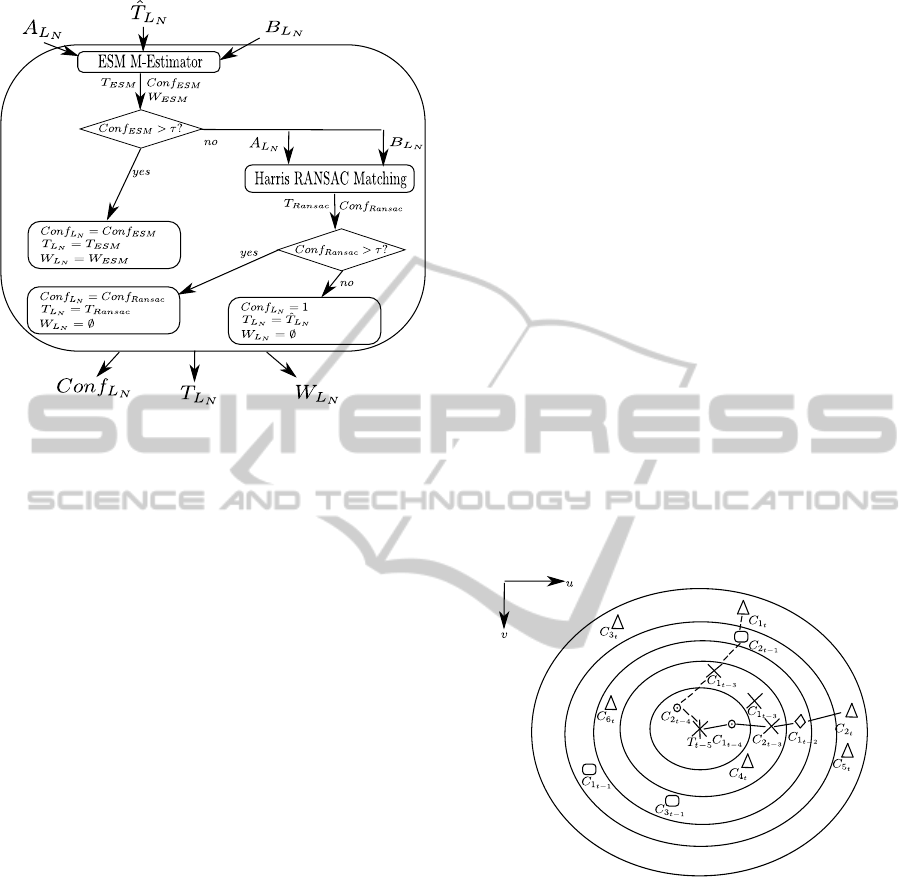
Figure 2: Image registration algorithm for a level L
N
of the
pyramid.
whose certain are false positives. The objective of the
tracker is to reject them.
This tracker aims at checking the spatio-temporal
coherency (from N images, say N=10) of positions of
the moving targets of various sizes (from 3*3 pixels
to 50*50 pixels for a VGA image).
When looking at target detection for a short time
in a same reference frame, we noticed that centroids
of moving targets leave like “footprints” with spatio-
temporal coherency (see Figure 7 b)).
A Temporal Tracker... For a potential target T
p
de-
tected at time t − N, the algorithm can not decide if
it is an actual moving target or a false positive until
t, with N = 10 images in all of our tests. After this
time of tracking, regarding the polyline trajectory of
the target, it decides to label T
p
as a true target T.
The decision is done by assuming a target is mov-
ing with a smooth trajectory. All potential targets
which are impossible to track with the polyline are
rejected.
All positions of targets and false positives are
stored for the N previous images. This is the tempo-
ral sliding window. Each target or false positive of the
oldest time (t − N) initializes several polylines whose
the smoothest is retained, if it is smooth enough.
A Spatial Tracker... In order to look for the best
polyline of a moving target, we have to compensate
the camera motion during the temporal sliding win-
dow. This is easy to calculate thanks to the estimation
between two consecutive frames given by the image
registration block.
By doing this, we can filter the hypothetic de-
tections by only keeping whose contained in a re-
search area (represented with circles in Figure3). The
smaller circle contains hypothetic detections for time
t − N + 1 (N = 5). The larger circle contains hypo-
thetic detections for current time t.
This step of registration in the first frame of the
temporal sliding window is very important because of
the large movements that camera can make.
In presence of wind, the UAV motion is erratic.
This compensation allows to transform the target tra-
jectory in a soft one.
The Figure 3 describes our method for N = 5.
Starting from the target or false positive T
t−5
at posi-
tion
u
T
v
T
T
t−5
. At t − 4, three possibilities: C
1
t−4
,
C
2
t−4
and no detection. This last possibility is due
to the fact that the target may be occluded during a
short time. At t − 3, only the possibilities allowing
a continuity in angles are taken into account, and no
detection. The process is iterated until current time t.
The polyline allowing the best compromise be-
tween real target detection and smoothing trajectory
is kept. Two possible polylines are shown in figure 3.
The one in continuous line is kept.
Figure 3: Spatio temporal-tracker.
6 RESULTS
6.1 Image Registration
6.1.1 M-Estimator
The M-Estimator avoids the deterioration in the pre-
cision of the estimated transformation in presence of
moving targets or occlusions. To check this, we simu-
lated a motion of the camera along the u-axis between
two images. Then, we added a percentage of rect-
angular moving targets with random color for each
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
270
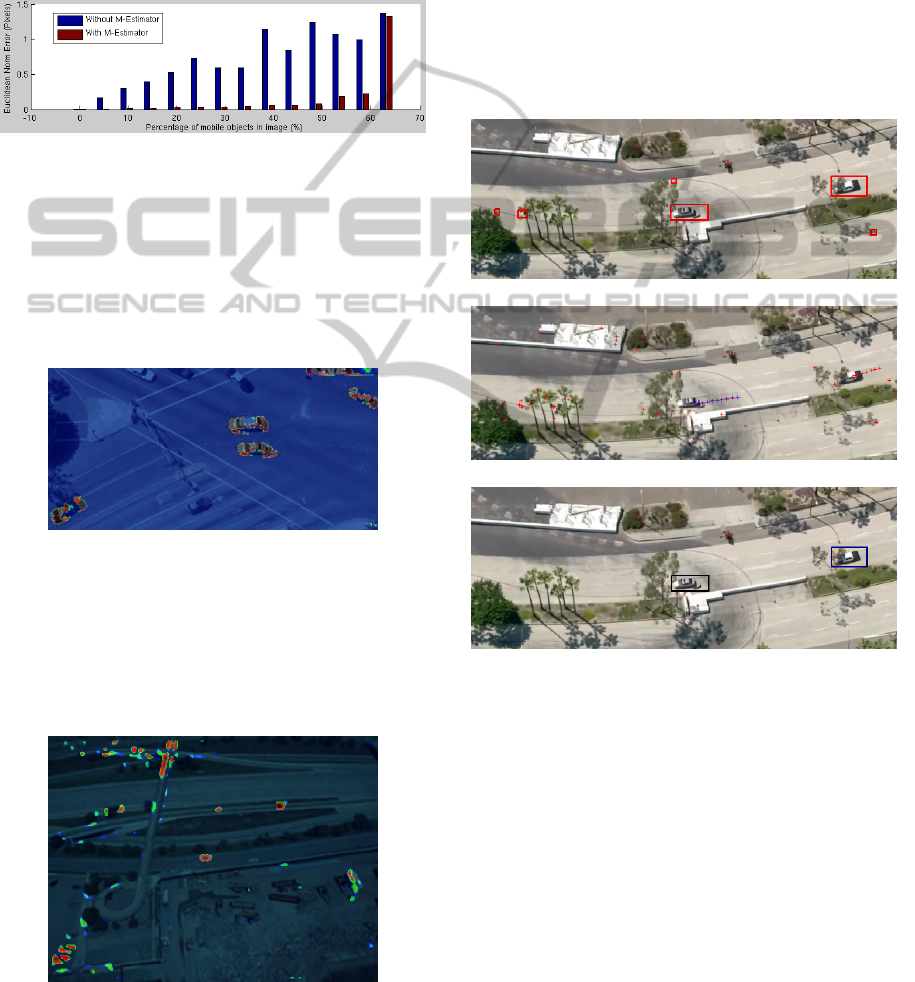
object. The figure 4 shows the results : the error of
the translation estimation function of the moving tar-
gets percentage, with and without M-Estimator. For
small targets (only few pixels), with a very low mo-
tion (near subpixel), it is impossible to detect them
with ESM only, without the using of M-Estimator
weighting whereas this is possible with the ESM M-
Estimator (see Figure 4).
Figure 4: Estimation error function of moving pixels per-
centage.
6.1.2 Weight Image W
t
An example of weights image result is given in figure
5, as a heat map image. Thanks to the high precision
in the estimation of the transformation, small moving
targets are detected with precision.
Figure 5: Heat map image based on M-Estimator weights
W
t
.
Even if registration gives good results, on certain
images some wrong detections still remain (see Fig-
ure 6). We can see these problems, due to compres-
sion, bad image quality, pixels interpolation (problem
localized on gradients essentially)...
Figure 6: Some false positives in a heat map image based
on M-Estimator weights W
t
. To see the original image, look
at Figure 8, Sequence 2.
We noticed that 40% false positives are present be-
fore filtering with the robust spatio-temporal tracker
and 0% of false negatives (undetected targets). These
results indicate that we need to filter to eliminate false
positives detections. However, the fact that all mov-
ing targets are detected in different video sequences
proves the very good results of image registration.
6.2 Spatio-temporal Tracking
This filter allows us to get only 3% of false positives
as a result of GMTI. The figure 7 shows the impor-
tance of such a filter.
(a) Results of labelling
(b) Spatio-temporal tracker results
(c) Results after filtering with the tracker
Figure 7: Spatio-temporal tracker used for filtering real
moving targets and wrong detections. All the possible de-
tections are registered in a same reference frame as we can
clearly view the ”footprints“ of all the targets (b). The cor-
rect polyline is displayed with blue crosses. Red crosses
indicate the outliers for the current target tracked.
6.3 Ground Moving Target Indicator
Figure 8 shows the results of the GTMI for different
kinds of videos taken by cameras mounted on UAVs.
Thanks to the design of our whole process (working
at 30Hz with VGA images and Proc. I5 2Ghz), even
targets of 3× 3 pixels size are detected as moving tar-
gets. This allows us not to miss any moving targets.
ARobustReal-timeImageAlgorithmforMovingTargetDetectionfromUnmannedAerialVehicles(UAV)
271

(a) Sequence 1 Image t = t
18
(b) Sequence 1 Image t = t
65
(c) Sequence 1 Image t = t
125
(d) Sequence 1 Image t = t
145
(e) Sequence 2 Image t = t
12
(f) Sequence 2 Image t = t
40
(g) Sequence 2 Image t = t
68
(h) Sequence 2 Image t = t
125
(i) Sequence 3 Image t = t
3
(j) Sequence 3 Image t = t
100
(k) Sequence 3 Image t = t
720
(l) Sequence 3 Image t = t
900
(m) Sequence 4 Image t = t
3
(n) Sequence 4 Image t = t
300
Figure 8: Results of target detection on a real images se-
quence.
7 CONCLUSIONS AND FUTURE
WORK
We proposed a real time method for Ground Moving
Target Indicator from a camera mounted on a UAV.
We designed a whole process that we detailed in this
article, composed of two main parts : an image reg-
istration block to compensate camera motion, and a
moving target detecion block to predict and validate
the position of moving targets in the current image.
We tested this GTMI algorithm for different kinds
of video sequences. Thanks to the design of a sub-
pixellic robust registration algorithm and the spatio-
temporal detection-based tracker, even targets of 3×3
pixel size with low speed are detected as moving tar-
gets.
About future work, we can notice that this paper
does not focus about an accurate segmentation and
labelling of the moving targets. This task is how-
ever very important because it could give us better re-
sults for the polyline tracker, and moreover allows us
to display with a better precision the moving targets
found.
REFERENCES
A.Goshtasby, G.C. Stockman, C. (1986). A region-based
approach to digital image registration with subpixel
accuracy. IEEE Transactions on geoscience on remote
sensing, 24:390–399.
Ali, S. and Shah, M. (2005). Cocoa - tracking in aerial
imagery. In Proc. Int. Conf. on Computer Vision.
Baker, S. and Matthews, I. (2002). Lucas-kanade 20 years
on: A unifying framework: Part 1. (CMU-RI-TR-02-
16).
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (surf). Comput. Vis. Image
Underst., 110(3):346–359.
Benhimane, S. and Malis, E. (2004). Real-time image-
based tracking of planes using efficient second-order
minimization. In Proceedings of the International
Conference on Intelligent Robots and Systems, pages
943–948.
Bonnin, P., Blazevic, P., Morillon, J., Fialaire, C., and
Benoist, J.-S. Real time tracking system by vision
simplifying the interaction between human and robot
for remote control of mobile robot. In RO-MAN, pages
945–950. IEEE.
chih Wang, C., Thorpe, C., Hebert, M., Thrun, S., and
Durrant-whyte, H. (2004). Simultaneous localization,
mapping and moving object tracking.
Cohen, I. and Medioni, G. (1998). Detection and tracking
of objects in airborne video imagery.
Crivelli, T., Bouthemy, P., Cernuschi-Frias, B., and Yao, J.-
F. (2011). Simultaneous motion detection and back-
ground reconstruction with a conditional mixed-state
markov random field. International Journal of Com-
puter Vision, 94(3):295–316.
Dame, A. and Marchand, E. (2012). Second order op-
timization of mutual information for real-time im-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
272

age registration. IEEE Trans. on Image Processing,
21(9):4190–4203.
de Cabrol, A., Bonnin, P. J., Hugel, V., Blazevic, P., and
Chetto, M. (2005). Video rate color region segmen-
tation for mobile robotic applications. Proc. SPIE,
5909:59091E–59091E–12.
de Cabrol, A., Bonnin, P. J., Hugel, V., Bouchefra, K., and
Blazevic, P. (2005). Temporally optimized edge seg-
mentation for mobile robotics applications. In Appli-
cations of Digital Image Processing XXVIII, volume
5909 of SPIE, pages 448–459.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. In In Proc. of Fourth Alvey Vision
Conference, pages 147–151.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521540518, second edition.
Huber, P., Wiley, J., and InterScience, W. (1981). Robust
statistics. Wiley New York.
Irani, M. and Anandan, P. (1998). A unified approach to
moving object detection in 2d and 3d scenes. IEEE
TRANSACTIONS ON PATTERN ANALYSIS AND MA-
CHINE INTELLIGENCE, 20.
Klose, S., Heise, P., and Knoll, A. (2013). Efficient compo-
sitional approaches for real-time robust direct visual
odometry from rgb-d data. In IROS, pages 1100–1106.
IEEE.
K.Poornima, R. (2012). A method to align images using
iamge segmentation. IJCSE, 2.
Ladikos, A., Benhimane, S., and Navab, N. (2007). A re-
altime tracking system combining template-based and
feature-based approaches. In IN VISAPP.
Lin, Y., Yu, Q., and Medioni, G. (2011). Efficient detection
and tracking of moving objects in geo-coordinates.
Mach. Vision Appl., 22(3):505–520.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comput. Vision, 60(2):91–
110.
Malis, E. and Marchand, E. (2006). Experiments with ro-
bust estimation techniques in real-time robot vision.
In IEEE/RSJ Int. Conf. on Intelligent Robots and Sys-
tems, IROS’06, pages 223–228, Beijing, Chine.
Migliore, D., Rigamonti, R., Marzorati, D., Matteucci, M.,
and Sorrenti, D. G. (2009). Use a single camera for si-
multaneous localization and mapping with mobile ob-
ject tracking in dynamic environments.
Odobez, J. and Bouthemy, P. (1997). Separation of mov-
ing regions from background in an image sequence
acquired with a mobile camera. In Li, H., Sun, S., and
Derin, H., editors, Video Data Compression for Multi-
media Computing, chapter 8, pages 283–311. Kluwer
Academic Publisher.
Reilly, V., Idrees, H., and Shah, M. (2010). Detection
and tracking of large number of targets in wide area
surveillance. In Proceedings of the 11th European
Conference on Computer Vision Conference on Com-
puter Vision: Part III, ECCV’10, pages 186–199,
Berlin, Heidelberg. Springer-Verlag.
Richard Evans, E. T. (2007). Visual mti for uav systems.
4th EMRS DTC Technical Conference Edinburgh.
Rodrguez-Canosa, G. R., Thomas, S., del Cerro, J., Bar-
rientos, A., and MacDonald, B. (2012). A real-time
method to detect and track moving objects (datmo)
from unmanned aerial vehicles (uavs) using a single
camera. Remote Sensing, 4(4):1090–1111.
Rosenfeld, A. and Pfaltz, J. L. (1966). Sequential operations
in digital picture processing. J. ACM, 13(4):471–494.
Smith, S. M. and Brady, J. M. (1995). Susan - a new ap-
proach to low level image processing. International
Journal of Computer Vision, 23:45–78.
yves Bouguet, J. (2000). Pyramidal implementation of the
lucas kanade feature tracker. Intel Corporation, Mi-
croprocessor Research Labs.
Zitov, B. and Flusser, J. (2003). Image registration methods:
a survey. Image and Vision Computing, 21:977–1000.
ARobustReal-timeImageAlgorithmforMovingTargetDetectionfromUnmannedAerialVehicles(UAV)
273
