
Human Activity Recognition Framework in Monitored Environments
O. Le
´
on
1
, M. P. Cu
´
ellar
1
, M. Delgado
1
, Y. Le Borgne
2
and G. Bontempi
2
1
Dept. Computer Science and Artificial Intelligence, University of Granada,
C/. Pdta. Daniel Saucedo Aranda s.n., Granada, Spain
2
Machine Learning Group, Universit Libre de Bruxelles, Campus LaPlaine, Bruxelles, Belgium
Keywords:
Human Activity Recognition, Ambient Assisted Living, Vision Computing, Data Mining.
Abstract:
This work addresses the problem of the recognition of human activities in Ambient Assisted Living (AAL)
scenarios. The ultimate goal of a good AAL system is to learn and recognise behaviours or routines of the
person or people living at home, in order to help them if something unusual happens. In this paper, we explore
the advances in unobstrusive depth camera-based technologies to detect human activities involving motion. We
explore the benefits of a framework for gesture recognition in this field, in contrast to raw signal processing
techniques. For the framework validation, Hidden Markov Models and Dynamic Time Warping have been
implemented for the action learning and recognition modules as a baseline due to their well known results in
the field. The results obtained after the experimentation suggest that the depth sensors are accurate enough and
useful in this field, and also that the preprocessing framework studied may result in a suitable methodology.
1 INTRODUCTION
Currently, there are several approaches to monitor the
movements of a person and their health (Hein and
Kirste, 2008). Nevertheless, behaviour recognition,
especially regards to most complex activities such as
the ADL (Activities of Daily Living), is still a chal-
lenge. There are some proposals that try to deal with
specific requirements, but a single solution that ad-
dresses all the problems is not known. Among some
of the well known research works in this field, we
emphatise the project Tagged World
1
, which tries to
provide services to users to make their lives safer and
easier. The goal of this project is to develop new ap-
plications based on the use of RFID tags and the as-
sumption that in a short time, all the objects that we
can buy will include one. On the other hand, other
projects focus in the pattern mining of the user’s ac-
tivity to detect abnormal behaviours. For instance,
(Rantz et al., 2008), Rantz et al. developed a temporal
clustering method based on detecting gradual changes
as a result of deteriorating conditions in the person ob-
served. This proposal is included in the project Tiger-
Place, where the authors propose a research and edu-
cational environment based on the concept of Aging in
Place. In the work done by Storfer et al. (Storf et al.,
2009), an activity recogniser based on a multi-agent
1
http://taggedworld.jp/
framework is presented. Their approach to recognise
complex activities (ADLs) is based on the technique
divide-and-conquer, decomposing them into atomic
actions, and each atomic and complex action is de-
tected by a specialised agent with its own logical unit.
Another option to detect indoor human behaviours
is by means of video-cameras. The cameras may pro-
vide all the necessary information about a scene, but
the complexity arises when making the system capa-
ble of understanding what is happening in the images
of the video stream. Further limitations of these tech-
niques are occlusions, cluttered background, shad-
ows, varying illuminations, and viewpoint changes.
At the moment, there are no proposals that are able
to learn and detect complex behaviours such as the
ADLs using video data, although in the last few years
there has been an increasing effort in the field of au-
tomatic gesture recognition as a first step. For ex-
ample, the work done by Reifinger (Reifinger et al.,
2007) is intended to recognise a person’s hand ges-
tures, whether static or dynamic, to be used in aug-
mented reality applications. It is based on an infrared
tracking system where the aims of the infrared device
are targeted on the index and thumb fingers, collecting
information about the position and orientation of each
finger. As a result, the gesture detection is provided
to any application that is connected to the back-end.
Depth cameras appeared on the market in the last
487
León O., P. Cuellar M., Delgado M., Le Borgne Y. and Bontempi G..
Human Activity Recognition Framework in Monitored Environments.
DOI: 10.5220/0004755504870494
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 487-494
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

few years and are useful to overcome some limitations
of raw video cameras, such as shadows, viewpoint
changes and body detection. The release and popu-
larity of the Microsoft Kinect provides RGB image
and depth image streams (Raheja et al., 2011). Al-
though targeted initially for the home entertainment
market with the XBOX console, the Kinect has re-
ceived increasing interest from the vision and robotics
community due to its great potential (Giles, 2010). A
good example of its possible application is to detect
the presence of people in a scene. In the work of Salas
(Salas and Tomasi, 2011), a strategy that combines
colour and depth images (obtained by the Kinect de-
vice) by Histograms-of-Oriented Gradients (HOG) to
detect people in indoors environments is presented.
This strategy greatly improves previous work in this
field obtaining high accuracy (up to 34,981 targets
could be detected in an image). This people detec-
tor is efficient and accurate from the computational
point of view, and was validated in a pilot phase. An-
other work that tries to solve the activity recognition
problem can be found in (Shotton et al., 2013), where
a method to quickly and accurately estimate 3D posi-
tions of the user’s skeleton joints from a single depth
image from Kinect was proposed. With this kind of
information, we can address the problem of human
action recognition in a simpler way compared to the
use of classic RGB images.
In the last two years, there have been a wide num-
ber of approaches for human activity recognition us-
ing depth cameras. For instance, in proposals like
(Yang et al., 2012; Yang and Tian, 2013), the au-
thors develop a technique using EigenJoints (Yang
and Tian, 2012) to find movement features. The learn-
ing and recognition is executed by means of Nave-
Bayes-Nearest-Neighbor (NBNN) and SVM. Their
classification rate results are between 71% and 97%
depending on the dataset used in the experiments and
on the configuration of the training stage. We also
cite the article (Azary and Savakis, 2010), where the
authors explored the possibility of creating a finger-
print for each action using radial distance and Mani-
fold Learning to represent the action on a smaller di-
mensional space. Finally, they perform classification
using lazy learning by means of the nearest neighbour
technique.
In this paper, we present a human activity recog-
nition framework based on depth image processing.
The motivation of the current work is to propose a
standard framework composed of 5 modules and steps
((a) body representation, (b) time series summariza-
tion, (c) posture clustering-quantization, (d) action
learning, and (e) action recognition), to achieve an
accurate model-based learning and recognition of hu-
man activities. This modular design eases the adapta-
tion to different scenarios and techniques, so that each
module can be superseded by the implementation of
a different technique. For the framework validation,
Hidden Markov Models have been implemented for
the action learning and recognition modules as a val-
idation technique due to its well known results in the
field (Gao and Sun, 2013a; Gao and Sun, 2013b).
The results are compared with standard technique in
gesture recognition, such as Dynamic Time Warping
(DTW) (Berndt and Clifford, 1994), in order to com-
pare model-based learning and recognition, and raw
signal processing techniques. Besides a detailed dis-
cussion of our recognition approach, we also present
a comparison of the results with previous work done
with normal video-cameras.
The paper is structured as follows: in Section 2,
we introduce the general problem of activity recogni-
tion and then, our activity recognition framework ap-
proach for solving this problem. Section 3 reports and
discusses the experimental results obtained as well as
a comparison with previous related work. Finally, we
provide some conclusions and future work.
2 ACTIVITY RECOGNITION
FRAMEWORK
A central challenge faced by Ambient Assisted Living
systems is to find a reasoning method for detection of
human behaviour, based upon a continuous sequence
of events (states and state changes) measured by the
different sensing systems. This becomes even more
complicated if the sensors are integrated into the envi-
ronment and thus, cannot be directly correlated with
an user. In our approach, we intend to use a single
sensor that is able to provide us with data about how
many users are in the scene and their body postures
of these users; but the main problem is the complex-
ity of how to process the data received by the sensor
and how to make the system capable of understand-
ing the user’s behaviour through the actions he/she
carries out. The device selected for this task is the
Microsoft’s Kinect camera, which offers depth im-
ages of the scene. To avoid privacy problems, our
framework directly uses three-dimensional points of
the user’s body, obtained by an existing middleware
called OpenNI
2
, so that no images are saved. We
have created a database, recording different actions
done by different users (see section 3) to be able to
train the models and test the applicability of the ap-
proach to detect accurately short-time actions.
2
http://en.wikipedia.org/wiki/OpenNI
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
488

The framework model proposed consists of five
steps: First, the data provided by the camera is pro-
cessed to obtain the user’s body skeleton representa-
tion as a temporal data series (section 2.1); secondly,
the data series are summarized (section 2.2). Then we
quantize each body posture of the series using clus-
tering to make the representation of the whole action
easier (section 2.3); then the training of each action
by means of Hidden Markov Models is carried out
(section 2.4). Finally, we obtain a trained HMM used
for a later recognition of new instances (section 2.5).
Our goal is to create a framework that learns, detects,
and recognises different events performed by users at
home. Each of these events or actions will correspond
to a sequence of images obtained by the camera, in
this case, a sequence of the user’s body postures.
2.1 Step 1: Initial Processing of the 3D
Data Provided by the Camera
We obtain the user’s body skeleton directly from the
camera, represented as a set of fifteen 3D points (body
joints). Then, we process this data to obtain a body
representation independent of the heading and dis-
tance from the camera. This representation is the set
of angles between consecutive body joints with the
diference of the height of the user’s chest in respect
to an initial value obtained from the first frame. The
height difference is useful to detect actions such as
bending, sitting down, etc...). As a result, the body
posture on each frame received by the camera is rep-
resented by a set of eleven real values (ten angles plus
the height variation).
2.2 Step 2: Compressing the Data Series
Video cameras, and also depth sensors, provide a
large amount of data in a short amount of time. There-
fore, it becomes necessary to simplify the processing
of these data as much as possible to achieve a fast
and real-time processing. In our approach we perform
data summarization and dimensionality reduction in
steps 2 and 3. In step 2, the multivariate data sequence
obtained from the sensor is compressed to reduce the
computational cost of later steps in recognition (see
figure 1 for an illustrated example of time series sum-
marization). Another advantage of summarization is
that it also serves as a filter to prevent potential false
sensor measures and to smooth the data series. The
method selected for this task in the experimentation
is Piecewise Aggregate Approximation (PAA) (Keogh
et al., 2001) as a proof of concept.
Figure 1: Illustrated example of compressing time series of
postures.
2.3 Step 3: Quantizing each Posture
Step 3 aims at dimensionality reduction by means
of quantization. The objective is to reduce a frame
(posture) composed by a multivariate signal (11 real
values in our case) to a single dimension so that the
computational time of the recognition techniques can
be decreased for real-time processing. To achieve
this, we have applied clustering techniques, and more
specifically the K-means (Mitsa, 2010) algorithm.
The clustering is used to find template postures that
can be tagged uniquely using the cluster center, so
that during the recognition process each new frame
is quantized and assigned with the label of its nearest
template posture. Figure 2 illustrates this idea, where
we show 5 different clusters with their central pos-
tures (left side) and different postures being tagged
according to their nearest template (right side). For
the example, we have used letters, i.e ”G”, ”C”, ”T”,
”B”, ”A”, as cluster labels for clarity.
Figure 2: Example of posture quantization using clustering,
where each posture of the series was initially a vector of 11
real values. After clustering, we obtain a single tag.
We illustrate the main advantages of steps 2 and
3 to justify their need: At first, a sample of an ac-
tion that lasts 2 seconds is a data series of 60 frames,
where each frame is composed of 11 real values (660
real values). After applying PAA (compression rate
of 4) and K-means (k = 21), the data series is reduced
HumanActivityRecognitionFrameworkinMonitoredEnvironments
489

to a sequence of 15 discrete labels. As stated before,
this preprocessing is useful to achieve a real-time pro-
cessing in our approach.
2.4 Step 4: Training the Model for
Action Learning
In this work, we use Hidden Markov Models (HMM)
and Dynamic Time Warping (DTW) to learn and
recognise the actions performed by different partici-
pants, since both techniques have been widely used
in previous research works regarding human activ-
ity recognition (Crandall and Cook, 2010; Xia et al.,
2012; Corradini, 2001). In our case, the objective
is to learn and recognise 7 different actions. To this
end, we trained 7 different HMMs with the Baum-
Welch (Rabiner and Juang, 2003) algorithm, each one
matched with an activity. The number of states in
each HMM is set to the number of clusters obtained
from Step 3, and each state is matched with a template
posture (cluster center). Training sequences of each
activity were provided to find the optimal transition
and a priori probabilities of each model. Thus, after
we obtain a sequence of labels corresponding to an
activity in the recognition state, a HMM may provide
us with the probability that the sequence can be gen-
erated from the learned model. On the other hand, in
the case of DTW we use instance-based learning. We
select a subset of instances of the recorded actions as
template activities. New instances acquired from the
sensor data are compared to the templates and they
are classified using the k-Nearest Neighbour method
(k-NN).
2.5 Step 5: Action Recognition
For the recognition stage, we follow the same three
steps of the process explained before to reduce the
data sequence. After that, the resulting reduced se-
quence is used as input for all the models trained.
In the case of HMM, each model returns a probabil-
ity, reflecting the likelihood of the input sequence that
conforms to the model. The recognised activity is the
one whose HMM provides the highest probability. In
the case of DTW, the new instance is tagged with the
activity of the nearest template using 1-NN. Figure 3
illustrates this procedure with HMM.
Figure 3: Example of action recognition with the trained
HMMs.
3 EXPERIMENTAL RESULTS
3.1 Dataset and Data Acquisition
The human actions selected in this study were cho-
sen because they are present in many of the existing
video databases on this topic (for example: (Mokhber
et al., 2008), (Mat, 2007), (Laptev, 2005)). In our
case, we wanted to test the approach in real-time sce-
narios under controlled environmental conditions, and
decided to create our own dataset. This was an experi-
mental design decision to be able to move the camera,
change the lighting of the room, and the background,
to test the performance of the approach under a well-
known work environment with changing conditions to
describe the user’s posture independently of his/her
position. Moreover, this decision was useful to test
real-time processing.
Therefore, a first step to perform the experimen-
tation was to record the dataset with some volun-
teers from the university. The 7 selected actions
were: walk, sit down, stand up, bend down, bend up,
twist right and twist left, since these activities are the
most frequent ones in the literature. For the experi-
ments, we got 17 different participants that consented
to recording the activities (array of 3D joint locations
of the body, no image recording to preserve privacy).
Each participant performed 10 repetitions of each ac-
tivity, so the final dataset is composed of 1190 sam-
ples. The duration of the actions was chosen so that
every participant had enough time to perform the re-
quested tasks, and we recorded 60 frames (2 seconds)
of each activity during its execution except for walk,
which required 90 frames because it is a longer action.
We decided that the duration of the recordings should
not be longer than these values since our objective is
to test the approach in real-time scenarios. Finally, we
have decided to make the dataset available to other re-
searchers for reproducibility
3
.
3
Dataset available at: http://decsai.ugr.es/ manupc/presens
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
490

3.2 Parameters and Experimental
Settings
The algorithm used to summarize the number of
frames of each action sample was PAA. We have used
three different compression rates to compare which
one performs better. The rates chosen were 2, 4,
and 6, which reduce the frame samples to half, one
quarter, and one sixth of the total size respectively.
The best results were obtained with PAA = 2 and,
for space limitations, we only show the results with
this parameter value in the article. After executing
the algorithm, the summarized data is stored in the
database. On the other hand, for the clustering stage
we selected the K-means algorithm due to its sim-
plicity and good average results in multiple problems.
The distance metric we selected to compare different
postures was Chebisher distance, i.e. the maximum
absolute difference of the 11 values of the two pos-
tures, since it provided us with better average results
than other metrics such as Euclidean distance or City
Block. Also, the data series were normalized before
clustering to avoid effects of scale/translation. Fi-
nally, the values of k chosen for the experiments with
k-Means were 14, 21, 28, 35, 49, 70, 84, 98, 112 and
126. In this stage, we implemented a multistart tech-
nique
4
to obtain the best set of clusters that separate
the postures, specifically 100 times for each configu-
ration. The resulting preliminar experimentation pro-
vided us with an optimal value of k = 112.
Analogously to the multistart technique imple-
mented in K-Means, we performed multiple runs to
obtain the 7 models (HMM) that best differentiate the
actions. For this task, we implemented the cross vali-
dation technique (10-Fold and 80% of training data).
The set of models that made the least classification
errors was chosen. In total, we performed cross-
validation 100 times for each combination number of
clusters-compression rate, and the best training data
set for each action was stored.
3.3 Results
We tested the approach in two different scenarios:
First, training and test of data recorded from each
participant separately. This experimentation has been
done because in real AAL environments, mainly fo-
cused on elderly people, the average household will
be comprised of one or two users. The second sce-
nario considers all participants together, and is aimed
to test the degree of abstraction that can be achieved
4
How GlobalSearch and MultiStart Work.
http://www.mathworks.es/help/toolbox/gads/bsc59ag-2.html
to learn each activity independently of the participant
performing it. In this case, HMM approach is com-
pared with the results obtained by an implementation
of a well known technique, as it is Dynamic Time
Warping (DTW) (Berndt and Clifford, 1994), used to
find patterns in time series and works directly with
the raw data for the inference and recognition of the
actions. The experiments were carried out on an aver-
age personal PC with Pentium Dual Core processor,
CPU E5700, 3,00 GHz, 800 MHz FSB, 2 GB RAM,
running Ubuntu Linux 12.10.
3.3.1 Testing Participants Data
In this test we have processed the data of each par-
ticipant separately. Each participant performed the 7
actions 10 times, so we are provided with 70 samples
for each one. To perform the training, we used the 10-
Fold cross validation technique using 80% of training
data, uniformly distributed between positive and neg-
ative samples for each activity. Table 1 shows the re-
sults obtained for the classification of each participant
(success rate). The first column of the table shows
the participant’s id; and the second and third columns
describe the success rate obtained after the classifica-
tion of all actions in the training and test datasets for
each participant, respectively. Finally, the last column
represents the total success rate for that participant’s
data. The last row of the table shows the average suc-
cess rate for all participants, with a value of 99.3%.
We have not found significant differences between the
recognition of different activities, which means that
the proposal is robust and performs similarly for all
actions in the dataset.
According to these results, we may conclude that
the proposed methodology is suitable to distinguish
actions when the same user is being monitored in
the environment. The average computational time to
achieve the recognition of actions is 0.635 seconds for
the activity recordings of 60 frames and 0.938 sec-
onds for those of 90 frames, which in turn means that
the approach is also suitable for near real-time pro-
cessing scenarios with a frequency of 17fps for sen-
sor data acquisition. As stated before, we find these
results specially relevant for Ambient Assisted Living
scenarios, where the number of inhabitants at home
is generally low (up to 4 people, usually 1-2 peo-
ple). For this reason, we are considering the inclu-
sion of this system in a global solution to detect hu-
man behaviours, where the approach presented in this
work would be able to recognise actions whose per-
formance usually takes a small amount of time, and
another upper system could be able to infer and recog-
nise longer and more complex activities such as morn-
ing routine, lunch time, etc., using not only a single
HumanActivityRecognitionFrameworkinMonitoredEnvironments
491
depth camera, but also further sensors located in the
environment that could be necessary depending of the
scenario.
Table 1: Percentage of success rate obtained by each partic-
ipant’s dataset using HMM.
Participant % Hits Training Set % Hits Test Set % Hits Total
1 100 92.8 98.6
2 100 100 100
3 100 92.8 98.6
4 100 92.8 98.6
5 98.2 100 98.6
6 100 92.8 98.6
7 100 100 100
8 98.2 100 98.6
9 100 100 100
10 100 92.8 98.6
11 100 100 100
12 100 100 100
13 100 100 100
14 96.4 100 97.1
15 100 100 100
16 100 100 100
17 100 100 100
Average All participants 99.3
3.3.2 Testing Activity Data
This section addresses the capability of the approach
to infer the main features of an action performed
by different users, so that the trained model could
recognise the action in future instances. Since this is
the usual scenario of previous approaches in gesture
recognition, we compare the approach with an imple-
mentation of DTW. The DTW implementation finds
patterns over the time series of the 3D joints positions
directly, without the need of data preprocessing. We
choose this technique for the comparison since it has
provided good results in this research field previously,
and its simplicity does not require computational time
for preprocessing. Moreover, we provide the results
of DTW as a lazy learning and recognition technique
within the proposed framework to validate our ap-
proach. The study of HMM outside the framework
was not possible since it requires discrete symbols as
input.
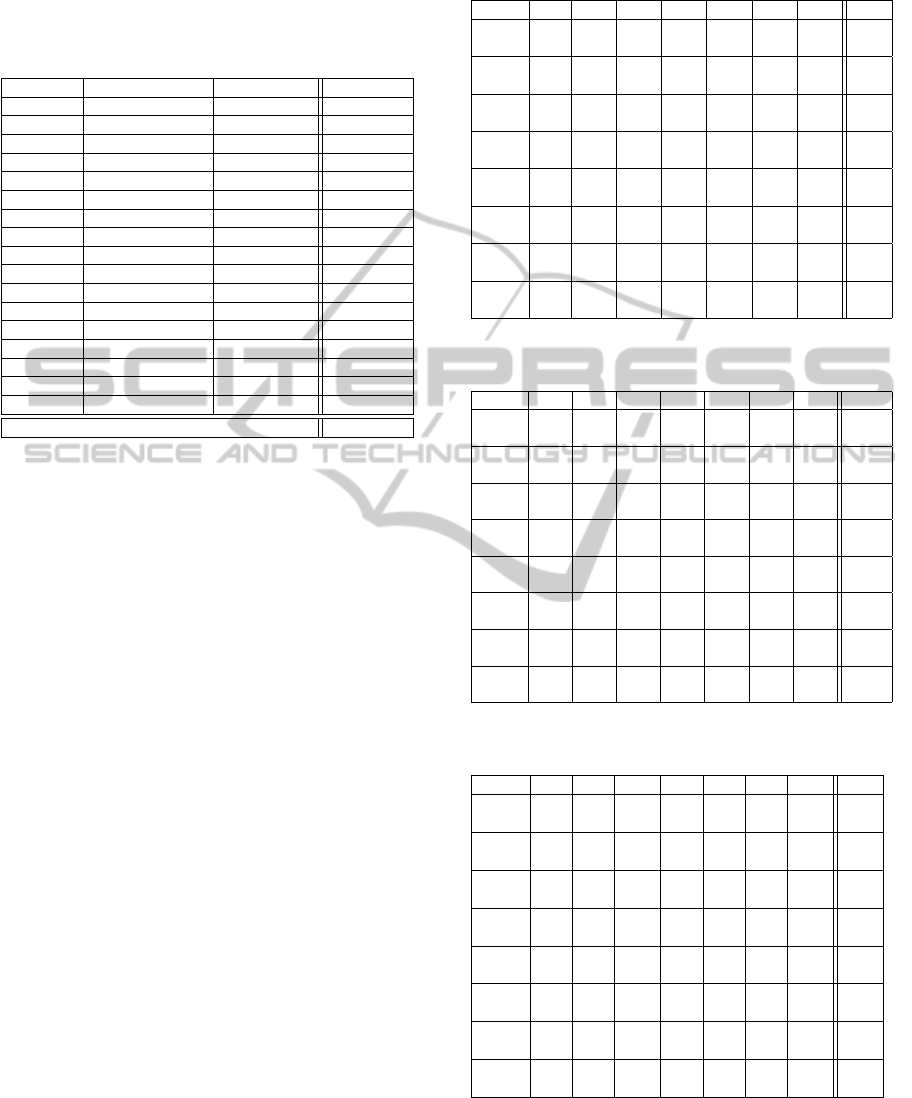
Tables 2, 3 and 4 shows the success rate obtained
with the whole dataset for each implementation, sepa-
rating the results by action (Walk (W), Sit Down (SD),
Stand Up (SU), Bend Down (BD), Bend Up (BU),
Twist Right (TR) and Twist Left (TL)). Each cell con-
tains the success in both training (above) and test (be-
low) data sets. In the last column and row of both
tables, the overall percentage of success rate for the
corresponding action are shown.
We may notice that the overall results obtained
by the techniques inside our framework outperformed
the one with standard DTW over the time series sig-
Table 2: Contingency Table of errors obtained in training
and test with classic DTW technique.
Action W SD SU BD BU TR TL %
W 133 1 0 0 0 2 0 97,8
32 0 0 0 0 1 1 94,1
SD 0 121 0 6 0 5 4 89
0 26 1 3 0 3 1 76,5
SU 0 3 131 0 2 0 0 96,3
0 0 30 1 3 0 0 88,2
BD 0 21 0 92 0 13 10 67,6
0 4 0 17 1 7 5 50,0
BU 0 0 4 1 131 0 0 96,3
0 0 4 0 30 0 0 88,2
TR 0 0 3 12 2 110 9 80,9
0 0 1 6 1 18 8 52,9
TL 0 11 0 7 0 7 111 81,6
0 5 0 1 0 9 19 55,9
% 100 77,1 94,9 78 97 80,3 82,8 87,1
100 74,3 83,3 60,7 85,7 47,4 55,9 72,3
Table 3: Contingency Table of errors obtained in training
and test with the proposed framework and HMM.
Action W SD SU BD BU TR TL %
W 129 0 0 0 0 0 8 94,2
27 0 0 0 0 2 4 81,8
SD 0 131 0 6 0 0 0 95,6
0 27 0 6 0 0 0 81,82
SU 0 0 127 0 10 0 0 92,7
0 0 25 0 8 0 0 75,76
BD 0 9 4 119 5 0 0 86,9
0 8 0 24 1 0 0 72,7
BU 0 0 1 0 136 0 0 99,3
0 0 5 1 27 0 0 81,8
TR 0 0 0 1 0 136 0 99,3
3 0 0 1 0 28 1 84,9
TL 1 0 0 0 1 1 134 97,8
3 0 0 0 0 0 30 90,9
% 99,2 93,1 96,1 94,1 88,2 99,7 94 95,1
77,8 70,4 80 66,7 66,7 92,9 83,3 81,4
Table 4: Contingency Table of errors obtained in training
and test with the proposed framework and DTW.
Action W SD SU BD BU TR TL %
W 136 0 0 0 0 0 0 100
34 0 0 0 0 0 0 100
SD 0 136 0 0 0 0 0 100
0 34 0 0 0 0 0 100
SU 0 0 136 0 0 0 0 100
0 0 33 0 1 0 0 97,1
BD 0 0 0 136 0 0 0 100
0 0 0 34 0 0 0 100
BU 0 0 0 0 136 0 0 100
0 0 2 0 32 0 0 94,1
TR 0 0 0 0 0 135 1 99,3
0 0 0 0 0 33 1 97,1
TL 0 0 0 0 0 0 136 100
0 0 0 0 0 0 34 100
% 100 100 100 100 100 100 99,3 99,9
100 100 94,3 100 97 100 97,1 98,3
nal. Overall success rate obtained by our framework
with Hidden Markov Models is 95,1% for training
data and 81,4% for test data, and 99,9% for training
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
492

and 98,3% for test for DTW. As it may be expected,
the highest rate of false positives is caused by actions
with similar movements, such as SD/BD or SU/BU.
In the opposite case, actions whose performance dif-
fers significantly from the remaining ones also have
high success rates, such as W.
Now, we analyze the robustness of the approach.
For the DTW baseline method, we identified two
classes of actions using non-parametric Kruskal-
Wallis test with 95% of confidence level: those that
can be predicted with higher performance (no statis-
tical differences between members in the group) and
those with lower performance (with statistical differ-
ences between members inside the group). Actions
in the first group are W, SD, SU, BU. This analy-
sis suggests that classic DTW performance may vary
depending on the learned action. On the other hand,
we applied the same analysis regarding the results in
the test set of the framework approach with HMM
and DTW, and we obtained no statistical relevance
between the results of each action recognition. This
means that, for the set of actions selected, the frame-
work performs the same independently of the action
to be learned. Thus, this fact suggests that the robust-
ness of the framework, for both DTW and HMM, is
higher than the baseline method.
Regarding execution time, the recognition of an
action using the proposed framework is 0.635 sec-
onds (60 frame processing) in average with HMM and
0.299 seconds in average with DTW. In respect to the
classic DTW, which spends 1.118 seconds, we vali-
date a clear improvement that makes our proposal not
only more accurate in the classification success rate,
but also more efficient in time and suitable for near
real-time use of the approach.
Another aspect of interest is the improvement in
performance of the DTW method with respect to the
framework using DTW. If we compare Tables 2 and 4,
we notice the increase in the success rate after using
the framework. This can be explained because data
sequences in our method are compressed and reduced,
and accumulated errors during the recognition stage
are not as relevant as in bigger data series. In addition,
the compression in Step 2 also serves as a filtering
process, which in turn removes outliers produced by
the sensor and make the data signal smoother.
Finally, we are also interested in the scalability
of both methods. DTW is an instance-based learning
method, which means that it achieves a good perfor-
mance when there are enough template instances to
compare with new data. Thus, when the number of
activities increases, so does the number of instances.
This increase could slow down the computing time of
the method, and therefore make more difficult its ap-
plication in real-time tasks. On the other hand, model-
based techniques have shown a poorer performance
to abstract relevant activity features in this work, al-
though they perform similarly to DTW when adapted
to a single user. In this case, as the number of activ-
ities increases, the number of models grows in a re-
lationship 1-to-1 (one model per activity), which sug-
gests that this approach could be more scalable. Nev-
ertheless, experiments must be carried out to test this
hypothesis, and the framework should also be com-
pared with different recognition techniques to give
support to the results of this work. For now, the
current work has served as a feasibility study of the
proposal and, following the quality of the results ob-
tained, we aim to improve the different aspects that
make up the system to make it more competitive and
applicable in commercial environments.
In respect to previous proposals, our approach
shows promising results. For example, in Mokhber
et al.(Mokhber et al., 2008), an accuracy rate of 90%
based on their own database of 1614 sequences, di-
vided into 8 actions, performed by 7 different peo-
ple was obtained. They used a simple classic cam-
era to record the video samples. Another proposal is
the work of Azary and Savakis (Azary and Savakis,
2010), tested with an existent 2D video database of
human actions which contains 10 basic actions. In
this work, a hit rate of 92% is achieved. In Minhas
et al.(Minhas et al., 2010), the system was tested with
two known 2D video databases: the Weizmann human
action dataset (Mat, 2007) (consisting of 9 human ac-
tions) and the KTH dataset (Laptev, 2005) (consisting
of 6 actions), obtaining a hit rate of 98% and 94%,
respectively.
4 CONCLUSIONS
In this paper, we have presented a framework for
learning and recognising human actions by means of
a depth camera as single sensor. The framework is
modular so that each module can be superseded by
another implementation of a different technique, and
is easily adaptable to different contexts. For the im-
plementation, we have tested learning and recognition
based on Hidden Markov Models and Dynamic Time
Warping. Furthermore, the results have been com-
pared with raw DTW, which operates directly with
the time series data. The experiments have shown
that the framework is useful for both improving the
accuracy in the recognition process and reducing the
computational time to achieve an effective near real-
time recognition. Our final goal is to create an AAL
environment that learns and recognises complex be-
HumanActivityRecognitionFrameworkinMonitoredEnvironments
493

haviours or routines of people at home. The exper-
iments carried out suggest that the approach may be
useful in this scenario thanks to its flexibility, simplic-
ity and robustness.
ACKNOWLEDGEMENTS
This work has been partially supported by the
CIE BioTIC CEI2013-P-3, the Fellow FPU pro-
gram of the Ministry of Education (Spain) AP2010-
6075, the Contrato-Programa 2013-2014 of the
Faculty of Humanities and Education of Ceuta,
and Innoviris, the Brussels Institute for Research
and Innovation through the ICT4Rehab project
(http://www.ict4rehab.org ).
REFERENCES
(2007). Actions as Space-Time Shapes. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
29(12):2247–2253.
Azary, S. and Savakis, A. E. (2010). View invariant activity
recognition with manifold learning. volume 6454 of
Lecture Notes in Computer Science, pages 606–615.
Springer.
Berndt, D. J. and Clifford, J. (1994). Using dynamic time
warping to find patterns in time series. In KDD work-
shop, volume 10, pages 359–370. Seattle, WA.
Corradini, A. (2001). Dynamic time warping for off-line
recognition of a small gesture vocabulary. In Recog-
nition, Analysis, and Tracking of Faces and Gestures
in Real-Time Systems, 2001. Proceedings. IEEE ICCV
Workshop on, pages 82–89.
Crandall, A. S. and Cook, D. J. (2010). Using a hidden
markov model for resident identification. In Proceed-
ings of the 6th Int. Conf. on Intelligent Environments,
IE ’10, pages 74–79.
Gao, Q. and Sun, S. (2013a). Human activity recognition
with beta process hidden markov models. In Pro-
ceedings of the International Conference on Machine
Learning and Cybernetics, pages 1–6.
Gao, Q. and Sun, S. (2013b). Trajectory-based human activ-
ity recognition with hierarchical dirichlet process hid-
den markov models. In Proceedings of the 1st IEEE
China Summit and International Conference on Sig-
nal and Information Processing, pages 1–5.
Giles, J. (2010). Inside the race to hack the kinect. New
Scientist, 208(2789):22–23.
Hein, A. and Kirste, T. (2008). Activity recognition for am-
bient assisted living : Potential and challenges. Sen-
sors Peterborough NH, pages 263–268.
Keogh, E., Chakrabarti, K., Pazzani, M., and Mehrotra, S.
(2001). Dimensionality Reduction for Fast Similarity
Search in Large Time Series Databases. Knowledge
and Information Systems, 3(3):263–286.
Laptev, I. (2005). On space-time interest points. Int. J.
Comput. Vision, 64:107–123.
Minhas, R., Baradarani, A., Seifzadeh, S., and
Jonathan Wu, Q. M. (2010). Human action
recognition using extreme learning machine based on
visual vocabularies. Neurocomput., 73:1906–1917.
Mitsa, T. (2010). Temporal Data Mining (Chapman &
Hall/CRC Data Mining and Knowledge Discovery Se-
ries). Chapman and Hall/CRC.
Mokhber, A., Achard, C., and Milgram, M. (2008).
Recognition of human behavior by space-time sil-
houette characterization. Pattern Recognition Letters,
29(1):81–89.
Rabiner, L. and Juang, B. (2003). An introduction to hidden
Markov models. ASSP Magazine, IEEE, 3(1):4–16.
Raheja, J. L., Chaudhary, A., and Singal, K. (2011). Track-
ing of fingertips and centers of palm using kinect. In
Computational Intelligence, Modelling and Simula-
tion (CIMSiM), 2011 Third International Conference
on, pages 248–252. IEEE.
Rantz, M., A., G., A., Oliver, D., M., M., S., J., K., Z., H.,
M., P., G., D., and S., M. (2008). An innovative edu-
cational and research environment. volume 17, page
8491.
Reifinger, S., Wallhoff, F., Ablassmeier, M., Poitschke, T.,
and Rigoll, G. (2007). Static and dynamic hand-
gesture recognition for augmented reality applica-
tions. In Int. Conf. on Human-computer interaction,
HCI’07, pages 728–737. Springer-Verlag.
Salas, J. and Tomasi, C. (2011). People detection using
color and depth images. In Proc. of the 3rd Mexican
conference on Pattern recognition, MCPR’11, pages
127–135. Springer-Verlag.
Shotton, J., Sharp, T., Kipman, A., Fitzgibbon, A., Finoc-
chio, M., Blake, A., Cook, M., and Moore, R. (2013).
Real-time human pose recognition in parts from sin-
gle depth images. Communications of the ACM,
56(1):116–124.
Storf, H., Becker, M., and Riedl, M. (2009). Rule-based ac-
tivity recognition framework: Challenges, technique
and learning. In Pervasive Computing Technologies
for Healthcare, 2009. PervasiveHealth 2009. 3rd In-
ternational Conference on, pages 1–7.
Xia, L., Chen, C.-C., and Aggarwal, J. K. (2012). View
invariant human action recognition using histograms
of 3d joints. In CVPR Workshops, pages 20–27. IEEE.
Yang, X. and Tian, Y. (2012). Eigenjoints-based action
recognition using naive-bayes-nearest-neighbor. In
Computer Vision and Pattern Recognition Workshops
(CVPRW), 2012 IEEE Computer Society Conference
on, pages 14–19. IEEE.
Yang, X. and Tian, Y. (2013). Effective 3d action recogni-
tion using eigenjoints. Journal of Visual Communica-
tion and Image Representation.
Yang, X., Zhang, C., and Tian, Y. (2012). Recognizing ac-
tions using depth motion maps-based histograms of
oriented gradients. In Babaguchi, N., Aizawa, K.,
Smith, J. R., Satoh, S., Plagemann, T., Hua, X.-S., and
Yan, R., editors, ACM Multimedia, pages 1057–1060.
ACM.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
494
