
Fast Violence Detection in Video
Oscar Deniz
1
, Ismael Serrano
1
, Gloria Bueno
1
and Tae-Kyun Kim
2
1
VISILAB group, University of Castilla-La Mancha, E.T.S.I.Industriales,
Avda. Camilo Jose Cela s/n, Ciudad Real, 13071 Spain
2
Department of Electrical and Electronic Engineering, Imperial College,
South Kensington Campus, London SW7 2AZ, U.K.
Keywords:
Action Recognition, Violence Detection, Fight Detection.
Abstract:
Whereas the action recognition problem has become a hot topic within computer vision, the detection of fights
or in general aggressive behavior has been comparatively less studied. Such capability may be extremely useful
in some video surveillance scenarios like in prisons, psychiatric centers or even embedded in camera phones.
Recent work has considered the well-known Bag-of-Words framework often used in generic action recognition
for the specific problem of fight detection. Under this framework, spatio-temporal features are extracted from
the video sequences and used for classification. Despite encouraging results in which near 90% accuracy
rates were achieved for this specific task, the computational cost of extracting such features is prohibitive for
practical applications, particularly in surveillance and media rating systems. The task of violence detection
may have, however, specific features that can be leveraged. Inspired by psychology results that suggest that
kinematic features alone are discriminant for specific actions, this work proposes a novel method which uses
extreme acceleration patterns as the main feature. These extreme accelerations are efficiently estimated by
applying the Radon transform to the power spectrum of consecutive frames. Experiments show that accuracy
improvements of up to 12% are achieved with respect to state-of-the-art generic action recognition methods.
Most importantly, the proposed method is at least 15 times faster.
1 INTRODUCTION
In the last years, the problem of human action recog-
nition from video has become tractable by using com-
puter vision techniques, see for example the sur-
vey (Poppe, 2010). Despite its potential useful-
ness, the specific task of violent action detection has
been comparatively less studied. A violence detector
has, however, immediate applicability in the surveil-
lance domain. The primary function of large-scale
surveillance systems deployed in institutions such
as schools, prisons and psychiatric care facilities is
for alerting authorities to potentially dangerous situ-
ations. However, human operators are overwhelmed
with the number of camera feeds and manual response
times are slow, resulting in a strong demand for auto-
mated alert systems. Similarly, there is increasing de-
mand for automated rating and tagging systems that
can process the great quantities of video uploaded to
websites. Violence detection is becoming important
not only on an application level but also on a more sci-
entific level, because it has particularities that make
it different from generic action recognition. For all
these reasons the interest in violence detection has
been steadily growing, and different proposals are al-
ready being published in major journals and confer-
ences. Also, public datasets are becoming increas-
ingly available that are specifically designed for this
task.
One of the first proposals for violence recognition
in video is Nam et al. (Nam et al., 1998), which
proposed recognizing violent scenes in videos using
flame and blood detection and capturing the degree
of motion, as well as the characteristic sounds of vi-
olent events. Cheng et al. (Cheng et al., 2003) rec-
ognizes gunshots, explosions and car-braking in au-
dio using a hierarchical approach based on Gaussian
mixture models and Hidden Markov models (HMM).
Giannakopoulos et al. (Giannakopoulos et al., 2006)
also propose a violence detector based on audio fea-
tures. Clarin et al. (Clarin et al., 2005) present a sys-
tem that uses a Kohonen self-organizing map to detect
skin and blood pixels in each frame and motion inten-
sity analysis to detect violent actions involving blood.
Zajdel et al. (Zajdel et al., 2007), introduced the CAS-
SANDRA system, which employs motion features re-
478
Deniz O., Serrano I., Bueno G. and Kim T..
Fast Violence Detection in Video.
DOI: 10.5220/0004695104780485
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 478-485
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

lated to articulation in video and scream-like cues in
audio to detect aggression in surveillance videos.
More recently, Gong et al. (Gong et al., 2008)
propose a violence detector using low-level visual and
auditory features and high-level audio effects identi-
fying potential violent content in movies. Chen et al.
(Chen et al., 2008) use binary local motion descriptors
(spatio-temporal video cubes) and a bag-of-words ap-
proach to detect aggressive behaviors. Lin and Wang
(Lin and Wang, 2009) describe a weakly-supervised
audio violence classifier combined using co-training
with a motion, explosion and blood video classifier
to detect violent scenes in movies. Giannakopou-
los et al. (Giannakopoulos et al., 2010) present a
method for violence detection in movies based on
audio-visual information that uses a statistics of audio
features and average motion and motion orientation
variance features in video combined in a k-Nearest
Neighbor classifier to decide whether the given se-
quence is violent. Chen et al. (Chen et al., 2011) pro-
posed a method based on motion and detecting faces
and nearby blood. Violence detection has been even
approached using static images (Wang et al., 2012).
Also recently, (Zou et al., 2012) approached the prob-
lem within the context of video sharing sites by us-
ing textual tags along with audio and video. Proof
of the growing interest is also the MediaEval Affect
Task, a competition that aims at discovering violence
in color movies (Demarty et al., 2012). In this case
the algorithms have access to additional information
such as audio, subtitles and previously-annotated con-
cepts. Besides, no comparisons are made about com-
putational times.
In summary, a number of previous works require
audio cues for detecting violence or rely on color to
detect cues such as blood. In this respect, we note
that there are important applications, particularly in
surveillance, where audio and color are not available.
Besides, while explosions, blood and running may be
useful cues for violence in action movies, they are rare
in real-world situations. In any case, violence detec-
tion per se is an extremely difficult problem, since vi-
olence is a subjective concept. Fight detection, on
the contrary, is a specific violence-related task that
may be tackled using action recognition techniques
and which has immediate applications.
Whereas there is a number of well-studied
datasets for action recognition, significant datasets
with violent actions (fights) have not been made avail-
able until the work (Bermejo et al., 2011). In that
work the authors demonstrated encouraging results
on violence detection, achieving 90% accuracy us-
ing MoSIFT features ((Chen et al., 2010)). MoSIFT
descriptors are obtained from salient points in two
parts: the first is an aggregated histogram of gra-
dients (HoG) which describe the spatial appearance.
The second part is an aggregated histogram of optical
flow (HoF) which indicates the movement of the fea-
ture point. Despite being considered within state-of-
the-art action recognition methods, the computational
cost of extracting these features is prohibitively large,
taking near 1 second per frame on a high-end laptop.
This precludes use in practical applications, where
many camera streams may have to be processed in
real-time. Such cost is also a major problem when the
objective is to embed a fight detection functionality
into a smart camera (i.e. going from the extant em-
bedded motion detection to embedded violent motion
detection).
Features such as MoSIFT encode both motion and
appearance information. However, research on hu-
man perception of other’s actions (using point-light
displays, see Figure 1) has shown that the kinematic
pattern of movement is sufficient for the perception
of actions (Blake and Shiffrar, 2007). This same idea
has been also supported by research on the computer
vision side (Oshin et al., 2011; Bobick and Davis,
1996). More specifically, empirical studies in the
field have shown that relatively simple dynamic fea-
tures such as velocity and acceleration correlate to
emotional attributes perceived from the observed ac-
tions (Saerbeck and Bartneck, 2010; Clarke et al.,
2005; Castellano et al., 2007; Hidaka, 2012), albeit
the degree of correlation varies for different emotions.
Thus, features such as acceleration and jerkiness tend
to be associated to emotions with high activation (eg.
anger, happiness), whereas slow and smooth move-
ments are more likely to be judged as emotions with
low activation (eg. sadness).
In this context, this work assumes that fights in
video can be reliably detected by such kinematic cues
that represent violent motion and strokes. Since ex-
treme accelerations play a key role we propose a novel
method to infer them in an efficient way. The pro-
posed fight detector attains better accuracy rates than
state-of-the-art action recognition methods at much
less computational cost. The paper is organized as
follows. Section 2 describes the proposed method.
Section 3 provides experimental results. Finally, in
Section 4 the main conclusions are outlined.
2 PROPOSED METHOD
As mentioned above, the presence of large acceler-
ations is key in the task of violence recognition. In
this context, body part tracking can be considered,
as in (Datta et al., 2002), which introduced the so-
FastViolenceDetectioninVideo
479

Figure 1: Three frames in a point light display movie de-
picting a karate kick.
called Acceleration Measure Vectors (AMV) for vi-
olence detection. In general, acceleration can be in-
ferred from tracked point trajectories. However, we
have to note that extreme acceleration implies image
blur (see for example Figure 2), which makes tracking
less precise or even impossible.
Motion blur entails a shift in image content to-
wards low frequencies. Such behavior allows to build
an efficient acceleration estimator for video. First,
we compute the power spectrum of two consecutive
frames. It can be shown that, when there is a sud-
den motion between the two frames, the power spec-
trum image of the second frame will depict an ellipse
(Barlow and Olshausen, 2004). The orientation of the
ellipse is perpendicular to the motion direction, the
frequencies outside the ellipse being attenuated, see
Figure 3. Most importantly, the eccentricity of this el-
lipse is dependent on the acceleration. Basically, the
proposed method aims at detecting the sudden pres-
ence of such ellipse. In the following, the method is
described in detail.
Figure 2: Two consecutive frames in a fight clip from a
movie. Note the blur on the left side of the second frame.
Let I
i−1
and I
i
be two consecutive frames. Motion
Figure 3: Left: Sample image. Center: simulated camera
motion at 45
◦
. Right: Fourier transform of the center image.
blur is equivalent to applying a low-pass oriented filter
C.
F (I
i
) = F (I
i−1
) ·C (1)
where F (·) denotes the Fourier Transform. Then:
C =
F (I
i
)
F (I
i−1
)
(2)
The low-pass oriented filter in C is the above-
mentioned ellipse.
For each pair of consecutive frames, we compute
the power spectrum using the 2D Fast Fourier Trans-
form (in order to avoid edge effects, a Hanning win-
dow was applied before computing the FFT). Let us
call these spectra images P
i−1
and P
i
. Next, we simply
compute the image:
C =
P
i
P
i−1
(3)
When there is no change between the two frames,
the power spectra will be equal and C will have a
constant value. When motion has occurred, an el-
lipse will appear in C. Our objective is then to detect
such ellipse and estimate its eccentricity, which repre-
sents the magnitude of the acceleration. Ellipse detec-
tion can be reliably performed using the Radon trans-
form, which provides image projections along lines
with different orientations, see Figure 4.
After computing the Radon transform image R,
its vertical maximum projection vector vp is obtained
and normalized to maximum value 1 (see Figure 4-
bottom). When there is an ellipse in C, this vector
will show a sharp peak, representing the major axis of
the ellipse. The kurtosis K of this vector is therefore
taken as an estimation of the acceleration.
Note that kurtosis alone cannot be used as a mea-
sure, since it is obtained from a normalized vector
(i.e. it is dimensionless). Thus, the average power per
pixel P of image C is also computed and taken as an
additional feature. Without it, any two frames could
lead to high kurtosis even without significant motion.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
480
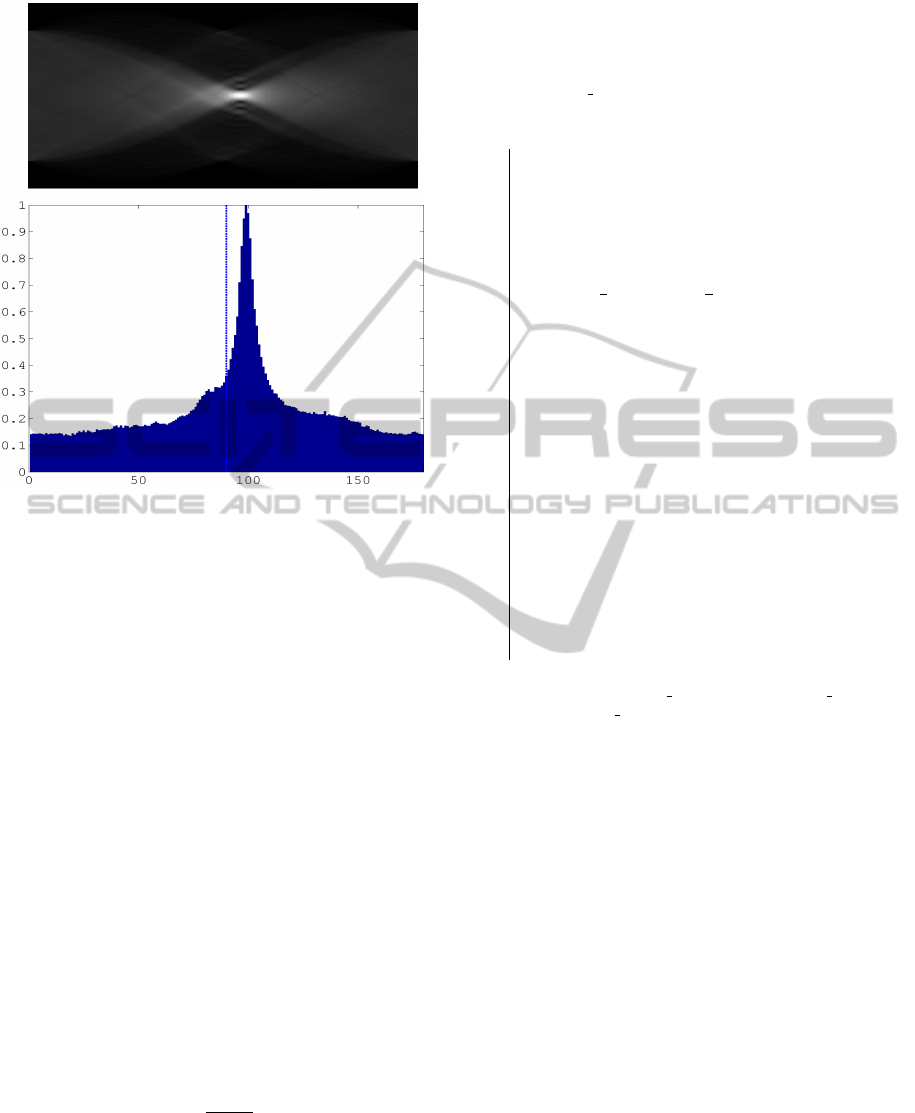
Figure 4: Top: Radon transform image of Figure 3-left un-
der a simulated camera motion at 98
◦
. The horizontal axis
represents angles between 0 and 180
◦
. Bottom: vertical
projection of the Radon image.
The previous paragraphs have described a proce-
dure that obtains two features K and P for each pair
of consecutive frames. Deceleration was also con-
sidered as an additional feature, and it can be ob-
tained by swapping the consecutive frames and ap-
plying the same algorithm explained above. For video
sequences, we compute histograms of these features,
so that acceleration/deceleration patterns can be in-
ferred.
In a variant of the proposed method, ellipse eccen-
tricity can be estimated by first locating the position p
of the maximum of vp. This maximum is associated
to the major axis of the ellipse. The minor axis is then
located at position:
q = p + 90
◦
i f (p + 90
◦
) ≤ 180
◦
q = p − 90
◦
otherwise
The ratio of the two values may then be used as a
feature, instead of the kurtosis:
r =
vp(p)
vp(q)
(4)
Algorithm 1 shows the detailed steps of the pro-
posed method.
Since the proposed method does not involve track-
ing or optical-flow techniques it is more suitable for
measuring extreme accelerations. Lastly, it is impor-
Input: S = (Short) sequence of gray scale images.
Each image in S is denoted as f
x,y,t
, where
x = 1,2,. ..,N, y = 1,2,.. .,M and
t = 1, 2,... ,T .
Result: 3 · n bins discriminant features
for t = 1 to T do
1. Apply a Hanning Window to f
x,y,t
:
g
x,y,t
= f
x,y,t
· H
x,y
where H
x,y
= h(N)· h(M)
0
and h is a
column vector given by:
h(L) =
1
2
h
1 −cos
2π
l
L
i
, for l = 1,2, ··· , L
2. Apply FFT to f
x,y,t
: F
v,w,t
= F (g
x,y,t
)
3. Compute C
v,w
= F
v,w,t
/F
v,w,t−1
4. Compute Radon transform of C:
R
d,θ
= R (C
v,w
)
5. Compute vertical max projection of R:
p
θ
= max
d
(R
d,θ
)
6. Normalize p
θ
= p
θ
/m, where m = max
θ
(p
θ
)
7. Compute feature A
t
= Kurtosis(p
θ
)
8. Compute feature P
t
= mean
v,w
C
v,w
9. Compute feature D
t
(deceleration) using the
same steps above but swapping t for t −1
end
return Histogram(A, n bins), Histogram(P,n bins),
Histogram(D,n
bins)
Algorithm 1: Algorithm for computing the main fea-
tures in the proposed method.
tant to note that global (i.e. camera) motion could
also cause blur in the image. In order to remove such
blur, it is necessary to perform a deconvolution pre-
processing step. The phase correlation technique is
first used to infer global motion between each pair of
consecutive frames. If global motion is detected, the
estimated angle and length of the displacement is used
to form a PSF with which to perform deconvolution
of the second frame (we used the Lucy-Richardson
iterative deconvolution method). This is intended to
remove the blur caused by global motion (camera mo-
tion), while any local blurs will remain. The method
described above is then applied to the pair of frames
as shown in Algorithm 1 above.
When backgrounds are relatively uniform and dis-
placements small, global motion estimation may still
fail. The fail mode is typically represented by real
global motion which goes undetected, i.e. an incor-
rect (0,0) displacement is estimated. Since the pro-
posed method is heavily dependent on global motion,
FastViolenceDetectioninVideo
481

further measures must be taken in practice to at least
detect the presence of global motion versus local mo-
tion. The window function mentioned above restricts
processing to the inner part of the image. It is reason-
able to assume that, when motion is global, changes
in the outer part of the image will be relatively on
par with those in the inner part. Thus, an additional
’Outer Energy’ O feature was computed and used in
the same way as the others:
O
x,y,t
=
| f
x,y,t
− f
x,y,t−1
| · (1 − H
x,y
)
M · N
(5)
The mean and standard deviation of O are then
used as additional features.
3 EXPERIMENTS
The work (Bermejo et al., 2011) introduced the first
two datasets explicitly designed for assessing fight de-
tection. The first dataset (“Hockey”) consists of 1000
clips at a resolution of 720x576 pixels, divided in
two groups, 500 fights (see Fig. 5 top) and 500 non-
fights, extracted from hockey games of the National
Hockey League (NHL). Each clip was limited to 50
frames and resolution lowered to 320x240. The sec-
ond dataset (“Movies”) introduced in (Bermejo et al.,
2011) consists of 200 video clips in which fights were
extracted from action movies (see Figure 5 bottom).
The non-fight videos were extracted from public ac-
tion recognition datasets. Unlike the hockey dataset,
which was relatively uniform both in format and con-
tent, these videos depicted a wider variety of scenes
and were captured at different resolutions.
In the experiments, the Radon transform was com-
puted between 0 and 180 in steps of θ = 20 degrees.
4-bin histograms were computed for each of the three
main features (acceleration, deceleration and power,
see the previous Section). The results measured us-
ing 10-fold cross-validation are shown in Table 1.
For convenience we also show the results reported in
(Bermejo et al., 2011), which used an SVM classifier.
In (Bermejo et al., 2011) STIP features performed
poorly on the Movie dataset and so MoSIFT was con-
sidered the best descriptor. MoSIFT’s superiority has
been also proven in other action recognition works.
The proposed method gives roughly equivalent accu-
racy and AUC for the Hockey dataset whereas it im-
proves on the Movie dataset by 9%.
Since the proposed method is based on extreme
acceleration patterns, energetic actions may pose a
problem. However, the method performs quite well
in this respect, as evidenced in the Hockey dataset re-
sults. Although the Hockey dataset may represent the
Figure 5: Sample fight videos from the Hockey (top) dataset
and the action movie (bottom) dataset.
most difficult dataset for a fight detector, in practice
we aim at separating fights from other actions. Con-
sequently, a more challenging dataset was also con-
sidered. The UCF101 (Soomro et al., 2012) is a data
set of realistic action videos collected from YouTube,
having 101 action categories. UCF101, see Figure
6, gives the largest diversity in terms of actions and
with the presence of large variations in camera mo-
tion, object appearance and pose, object scale, view-
point, cluttered background and illumination condi-
tions it is the most challenging dataset to date. For
our case, it is even more challenging since it includes
50 actions from sports. To our knowledge, this is the
largest and most challenging dataset in which a fight
detection algorithm has been tested.
In the experiments with UCF101, for the fight
set we pooled the fight clips of both the Hockey
and Movies dataset plus two of the 101 UCF ac-
tions that actually represented fights (“Punching” and
“Sumo”). This gave a total of 1843 fight clips. Non-
fight clips were taken from the other 99 action cate-
gories (42278 non-fight clips, totaling approximately
2 Million frames). In order to avoid unbalanced sets
we used randomly chosen subsets of 500 fight and 500
non-fight clips. For each subset we performed a 10-
fold cross-validation. This was in turn repeated 10
times.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
482
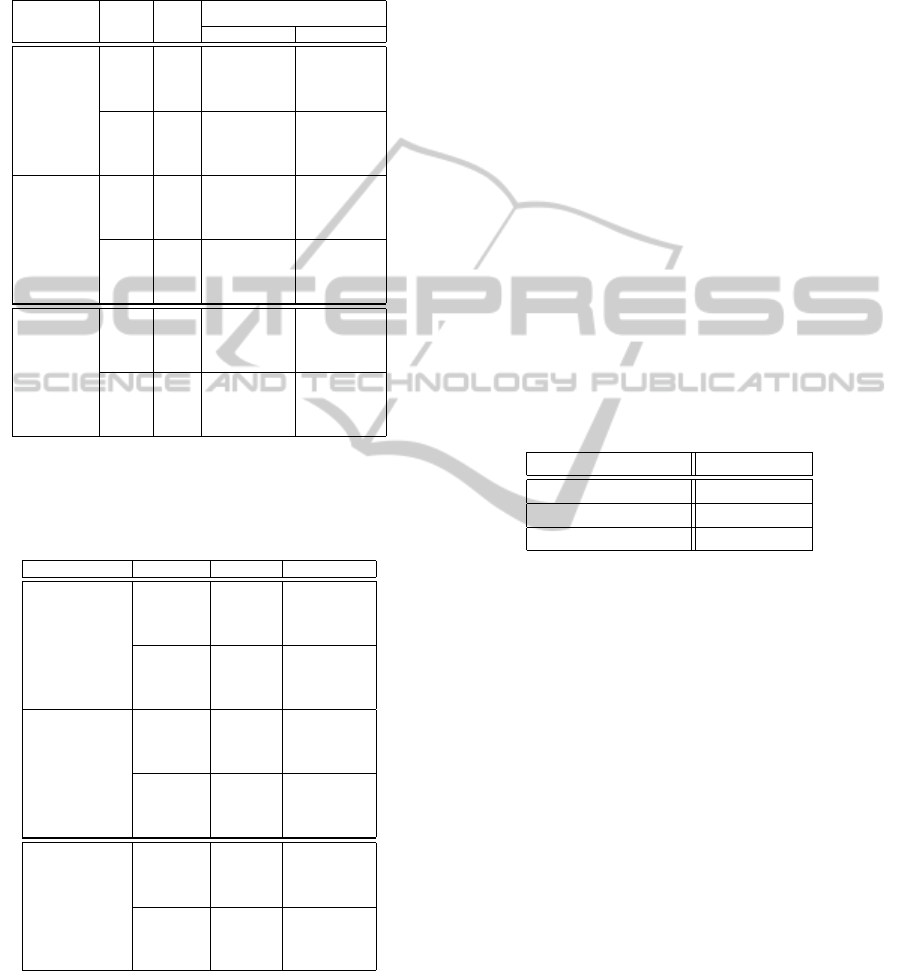
Table 1: Results on the Hockey and Movies datasets, 5 runs
of 10-fold cross-validation. Note: A stands for accuracy,
DR stands for detection rate, FR stands for false positive
rate, AUC stands for area under the (ROC) curve. In bold
are shown the best accuracies for each dataset and classifier.
Features ClassifierMeasure
Dataset
Movies Hockey
BoW(STIP)
SVM
A 82.5 ± 1.12 88.6 ± 0.15
DR 83.4 ±1.14 93.6 ±0.22
FR 18.4 ±1.14 16.5 ±0.18
AUC 0.8844 0.9383
Adaboost
A 74.3 ±2.31 86.5 ±0.19
DR 70.2 ±3.70 88.7 ±0.76
FR 21.6 ±3.21 15.7 ±0.52
AUC 0.8121 0.9220
BoW(MoSIFT)
SVM
A 84.2 ±1.15 91.2 ±0.24
DR 100 ±0 92 ±0.17
FR 31.6 ±2.30 9.6 ±0.41
AUC 0.9267 0.9547
Adaboost
A 86.5 ±1.58 89.5 ±0.40
DR 99.6 ±0.55 90.1 ±0.88
FR 26.6 ±3.05 11.1 ±0.27
AUC 0.9518 0.9492
Proposed
SVM
A 85.4 ±9.33 90.1 ±0
DR 71.4 ±19.42 80.2 ±0
FR 0.8 ±0.83 0 ±0
AUC 0.7422 0.9480
Adaboost
A 98.9 ±0.22 90.1 ±0
DR 97.8 ±0.45 80.2 ±0
FR 0.0 ±0.0 0 ±0
AUC 0.9999 0.9020
Table 2: Results on the UCF101 dataset. Note: A stands for
accuracy, DR stands for detection rate, FR stands for false
positive rate, AUC stands for area under the (ROC) curve.
In bold are shown the best accuracies for each classifier.
Features Classifier Measure Dataset
BoW(STIP)
SVM
A 72 ±1.78
DR 86.2 ±1.83
FR 42.2 ±3.26
AUC 0.7352
Adaboost
A 63.4 ±2.39
DR 75.3 ±3.60
FR 48.5 ±4.40
AUC 0.6671
BoW(MoSIFT)
SVM
A 81.3 ±0.78
DR 90.8 ±1.34
FR 28.1 ±1.88
AUC 0.8715
Adaboost
A 51.3 ±0.32
DR 100 ±0
FR 97.4 ±0.64
AUC 0.5340
Proposed
SVM
A 93.4 ±6.09
DR 87.3 ±11.12
FR 0.45 ±1.28
AUC 0.9439
Adaboost
A 92.8 ±6.29
DR 85.7 ±12.53
FR 0.02 ±0.06
AUC 0.9379
For BoW(MoSIFT), and even with the use of
parallel K-means, extracting vocabularies from the
whole dataset was unfeasible. Therefore, a random
subset of samples was first selected (600 of each
class) and then a vocabulary of size 500 (the best
vocabulary size in (Bermejo et al., 2011)) was com-
puted. The results are shown on Table 2. Figure
7 shows the ROC curve obtained for both methods
with the SVM classifier. These results suggest that
the method may effectively work as a fight detector
for generic settings. Global motion estimation exper-
iments did not seem to improve results significantly
in this case either.
Note that the results show the higher detection rate
already hypothesized in Section 2. This is evidenced
by the resulting ROC curves closer to the vertical axis
for the proposed method.
Table 3 shows the number of features used for
classification and the computational cost measured
(for feature extraction). The code for both STIP
and MoSIFT was compiled. The code for the pro-
posed method was interpreted and used no paralleliza-
tion. These results show an improvement in speed
of roughly 15 times with respect to the best previous
method (MoSIFT). The fact that only 14 features are
necessary (MoSIFT used 500) is an additional advan-
tage for practical implementations.
Table 3: Feature extraction times. Average times measured
with the non-fight videos in the UCF101 dataset, on an Intel
Xeon computer with 2 processors at 2.90Ghz.
Method Secs/frame
MoSIFT 0.6615
STIP 0.2935
Proposed Method 0.0419
4 CONCLUSIONS
Based on the observation that kinematic information
may suffice for human perception of other’s actions,
in this work a novel detection method is proposed
which uses extreme acceleration patterns as the main
discriminating feature. The method shows promis-
ing features for surveillance scenarios and it also per-
forms relatively well when considering challenging
actions such as those that occur in sports. Accu-
racy improvements of up to 12% with respect to state-
of-the-art generic action recognition techniques were
achieved. We hypothesize that when motion is suffi-
cient for recognition, appearance not only takes sig-
nificant additional computation but it also may con-
fuse the detector. Another interpretation is that a sort
of overfitting may be occurring in that case. In any
case, the extreme acceleration estimation proposed
seems to perform well, given that other methods may
fail because of the associated image blur.
The proposed method makes no assumptions on
number of individuals (it can be also used to detect
vandalism), body part detection or salient point track-
FastViolenceDetectioninVideo
483
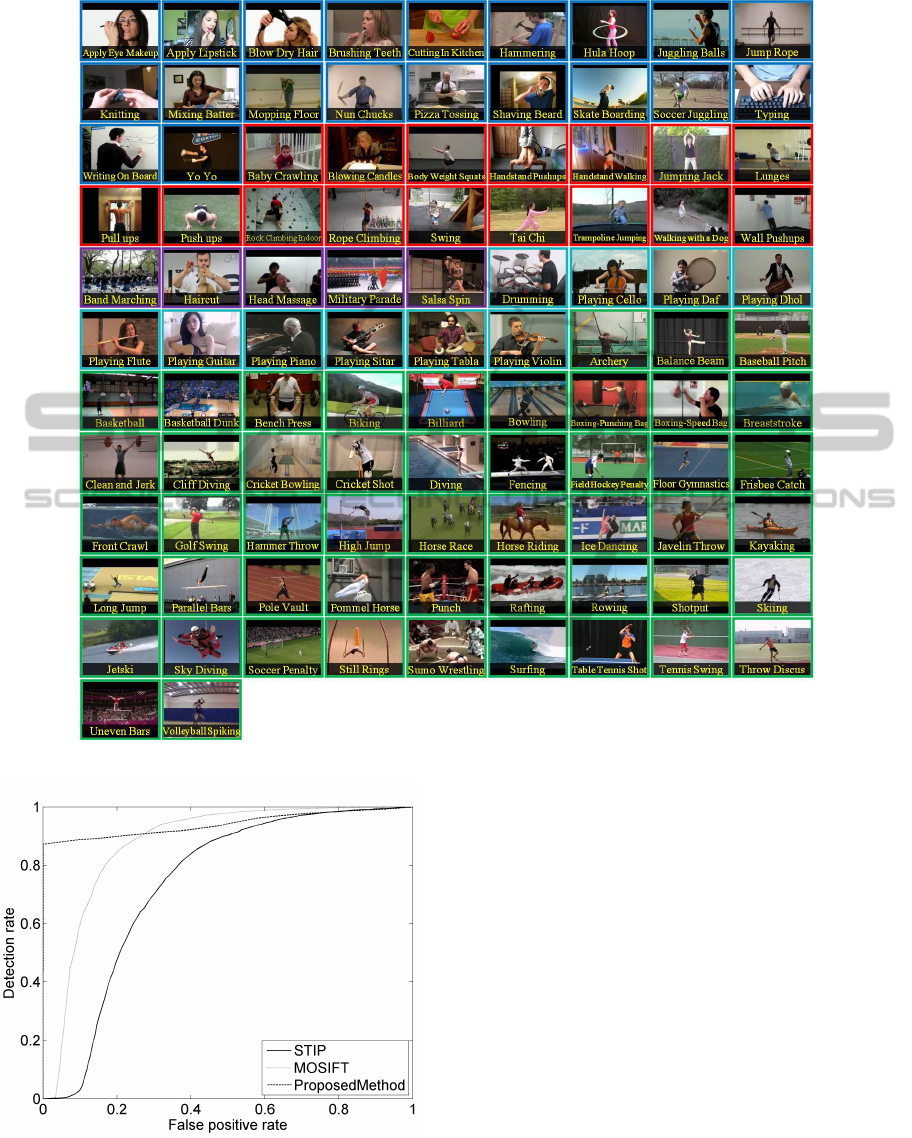
Figure 6: The 101 actions in UCF101 shown with one sample frame.
Figure 7: ROC curve with the SVM classifier. Average of
10 experimental runs.
ing. Besides, it is at least 15 times faster and uses only
14 features, which opens up the possibility of prac-
tical implementations. When maximum accuracy is
needed, the method could also act as a first attentional
stage in a cascade framework that also uses STIP or
MoSIFT features.
Future work will seek to perfect the method by ap-
proximating the Radon transform, which is the most
time-consuming stage. On a more basic level, we
shall investigate the implications with regards to the
relative importance of motion and appearance infor-
mation for the recognition of certain actions.
ACKNOWLEDGEMENTS
This work has been supported by research project
TIN2011-24367 from the Spanish Ministry of Econ-
omy and and Competitiveness.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
484

REFERENCES
Barlow, H. B. and Olshausen, B. A. (2004). Convergent ev-
idence for the visual analysis of optic flow through
anisotropic attenuation of high spatial frequencies.
Journal of Vision, 4(6):415–426.
Bermejo, E., Deniz, O., Bueno, G., and Sukthankar, R.
(2011). Violence detection in video using computer
vision techniques. In 14th Int. Congress on Computer
Analysis of Images and Patterns, pages 332–339.
Blake, R. and Shiffrar, M. (2007). Perception of Human
Motion. Annual Review of Psychology, 58(1):47–73.
Bobick, A. and Davis, J. (1996). An appearance-based rep-
resentation of action. In Pattern Recognition, 1996.,
Proceedings of the 13th International Conference on,
volume 1, pages 307–312 vol.1.
Castellano, G., Villalba, S., and Camurri, A. (2007). Recog-
nising human emotions from body movement and ges-
ture dynamics. In Paiva, A., Prada, R., and Picard, R.,
editors, Affective Computing and Intelligent Interac-
tion, volume 4738 of Lecture Notes in Computer Sci-
ence, pages 71–82. Springer Berlin Heidelberg.
Chen, D., Wactlar, H., Chen, M., Gao, C., Bharucha, A.,
and Hauptmann, A. (2008). Recognition of aggressive
human behavior using binary local motion descrip-
tors. In Engineering in Medicine and Biology Society,
pages 5238–5241.
Chen, L.-H., Su, C.-W., and Hsu, H.-W. (2011). Violent
scene detection in movies. IJPRAI, 25(8):1161–1172.
Chen, M.-y., Mummert, L., Pillai, P., Hauptmann, A., and
Sukthankar, R. (2010). Exploiting multi-level paral-
lelism for low-latency activity recognition in stream-
ing video. In MMSys ’10: Proceedings of the first
annual ACM SIGMM conference on Multimedia sys-
tems, pages 1–12, New York, NY, USA. ACM.
Cheng, W.-H., Chu, W.-T., and Wu, J.-L. (2003). Semantic
context detection based on hierarchical audio models.
In Proceedings of the ACM SIGMM workshop on Mul-
timedia information retrieval, pages 109–115.
Clarin, C., Dionisio, J., Echavez, M., and Naval, P. C.
(2005). DOVE: Detection of movie violence using
motion intensity analysis on skin and blood. Techni-
cal report, University of the Philippines.
Clarke, T. J., Bradshaw, M. F., Field, D. T., Hampson,
S. E., and Rose, D. (2005). The perception of emo-
tion from body movement in point-light displays of
interpersonal dialogue. Perception, 34:1171–1180.
Datta, A., Shah, M., and Lobo, N. D. V. (2002). Person-on-
person violence detection in video data. In Pattern
Recognition, 2002. Proceedings. 16th International
Conference on, volume 1, pages 433–438.
Demarty, C., Penet, C., Gravier, G., and Soleymani, M.
(2012). MediaEval 2012 affect task: Violent scenes
detection in Hollywood movies. In MediaEval 2012
Workshop Proceedings, Pisa, Italy.
Giannakopoulos, T., Kosmopoulos, D., Aristidou, A., and
Theodoridis, S. (2006). Violence content classifica-
tion using audio features. In Advances in Artificial In-
telligence, volume 3955 of Lecture Notes in Computer
Science, pages 502–507.
Giannakopoulos, T., Makris, A., Kosmopoulos, D., Peran-
tonis, S., and Theodoridis, S. (2010). Audio-visual fu-
sion for detecting violent scenes in videos. In 6th Hel-
lenic Conference on AI, SETN 2010, Athens, Greece,
May 4-7, 2010. Proceedings, pages 91–100, London,
UK. Springer-Verlag.
Gong, Y., Wang, W., Jiang, S., Huang, Q., and Gao, W.
(2008). Detecting violent scenes in movies by audi-
tory and visual cues. In Proceedings of the 9th Pa-
cific Rim Conference on Multimedia, pages 317–326,
Berlin, Heidelberg. Springer-Verlag.
Hidaka, S. (2012). Identifying kinematic cues for action
style recognition. In Proceedings of the 34th Annual
Conference of the Cognitive Science Society, pages
1679–1684.
Lin, J. and Wang, W. (2009). Weakly-supervised violence
detection in movies with audio and video based co-
training. In Proceedings of the 10th Pacific Rim Con-
ference on Multimedia, pages 930–935, Berlin, Hei-
delberg. Springer-Verlag.
Nam, J., Alghoniemy, M., and Tewfik, A. (1998). Audio-
visual content-based violent scene characterization. In
Proceedings of ICIP, pages 353–357.
Oshin, O., Gilbert, A., and Bowden, R. (2011). Capturing
the relative distribution of features for action recog-
nition. In Automatic Face Gesture Recognition and
Workshops (FG 2011), 2011 IEEE International Con-
ference on, pages 111–116.
Poppe, R. (2010). A survey on vision-based human action
recognition. Image and Vision Computing, 28(6):976
– 990.
Saerbeck, M. and Bartneck, C. (2010). Perception of affect
elicited by robot motion. In Proceedings of the 5th
ACM/IEEE international conference on Human-robot
interaction, HRI ’10, pages 53–60, Piscataway, NJ,
USA. IEEE Press.
Soomro, K., Zamir, A., and Shah, M. (2012). UCF101: A
dataset of 101 human action classes from videos in the
wild. CRCV-TR-12-01. Technical report.
Wang, D., Zhang, Z., Wang, W., Wang, L., and Tan, T.
(2012). Baseline results for violence detection in still
images. In AVSS, pages 54–57.
Zajdel, W., Krijnders, J., Andringa, T., and Gavrila, D.
(2007). CASSANDRA: audio-video sensor fusion for
aggression detection. In Advanced Video and Signal
Based Surveillance, 2007. AVSS 2007. IEEE Confer-
ence on, pages 200–205.
Zou, X., Wu, O., Wang, Q., Hu, W., and Yang, J. (2012).
Multi-modal based violent movies detection in video
sharing sites. In IScIDE, pages 347–355.
FastViolenceDetectioninVideo
485
