
Using Channel Representations in Regularization Terms
A Case Study on Image Diffusion
Christian Heinemann
1
, Freddie
˚
Astr
¨
om
2
, George Baravdish
3
, Kai Krajsek
1
, Michael Felsberg
2
and Hanno Scharr
1
1
IBG-2: Plant Sciences, Forschungszentrum J
¨
ulich, 52425 J
¨
ulich, Germany
2
Department of Electrical Engineering, Link
¨
oping University, SE-581 83 Link
¨
oping, Sweden
3
Department of Science and Technology, Link
¨
oping University, SE-601 74 Norrk
¨
oping, Sweden
Keywords:
Image Enhancement, Channel Representation, Channel Smoothing, Diffusion, Energy Minimization.
Abstract:
In this work we propose a novel non-linear diffusion filtering approach for images based on their channel
representation. To derive the diffusion update scheme we formulate a novel energy functional using a soft-
histogram representation of image pixel neighborhoods obtained from the channel encoding. The resulting
Euler-Lagrange equation yields a non-linear robust diffusion scheme with additional weighting terms stem-
ming from the channel representation which steer the diffusion process. We apply this novel energy formula-
tion to image reconstruction problems, showing good performance in the presence of mixtures of Gaussian and
impulse-like noise, e.g. missing data. In denoising experiments of common scalar-valued images our approach
performs competitive compared to other diffusion schemes as well as state-of-the-art denoising methods for
the considered noise types.
1 INTRODUCTION
The channel representation (Granlund, 2000) is a
special, lossless soft-histogram, in contrast to other
histograms. Encoding a single value in a channel
representation, the value can be accurately recon-
structed. Using the channel representation allows for
simple outlier-removing smoothing, so called channel
smoothing (Felsberg et al., 2006), by essentially for
each pixel encoding the values of its local neighbor-
hood into a soft-histogram and assigning the decoded
value of the dominant mode to it, i.e. the sub-’bin’-
position of the maximum value in the soft-histogram.
This paper studies the nature and performance
of regularization terms penalizing the gradient of a
channel-smoothed signal. The rational behind this
is the observation, that in a robust diffusion scheme
(Perona and Malik, 1990), which can be derived from
a regularization term penalizing the gradient of a sig-
nal, the smoothing process is stopped or reduced at
edges, i.e. high gradient values. An outlier may erro-
neously be detected as edge and by this not smoothed
away. Not considering the outlier in the penalizing
term thus is expected to result in still high smoothing
strengths at outlier positions, reducing their visibility.
The natural test case for such a regularization is its
use without a data term, i.e. image diffusion not reg-
ularization. Further, as the robustness to outliers is of
interest, one natural application is image reconstruc-
tion in the presence of mixed noises. We use mixtures
of Gaussian and impulse-like noise.
We do not expect to derive the novel best denois-
ing scheme for gray value image reconstruction and
our experiments show that state-of-the-art denoising
schemes do a better job here. However, this addi-
tional robustification by channel smoothing can eas-
ily be transferred to application domains, where diffu-
sion schemes are used in practice. Diffusion schemes
have been derived e.g. for color (Kimmel et al., 1998),
vector (Tschumperl
´
e and Deriche, 2005), or matrix-
valued data (Burgeth et al., 2007). They are applied
for regularization of DTMRI (Krajsek et al., 2008) or
high angular resolution diffusion imaging (HARDI)
data (Goh et al., 2011). Instead of a scalar-valued dif-
fusivities, tensorbased diffusion schemes use tensor-
valued diffusivities describing single or multiple ori-
entations in the image to drive the diffusion process
(Weickert, 1998; Scharr, 2006).
Crucial for the performance of non-linear diffu-
sion is an adaptation of the diffusivity, i.e. the local
smoothing strength, to image structure. Typically im-
age structure is measured as the Euclidean norm of
48
Heinemann C., Åström F., Baravdish G., Krajsek K., Felsberg M. and Scharr H..
Using Channel Representations in Regularization Terms - A Case Study on Image Diffusion.
DOI: 10.5220/0004667500480055
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 48-55
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the local image gradient. It is transformed into a dif-
fusivity by means of a edge-stopping function, assign-
ing small diffusivities to locations with high gradient
and vice versa. The exact choice of the edge-stopping
function has been shown to be equivalent to the choice
of error norm in robust statistics (Black et al., 1998)
and can be learned from image statistics (Zhu and
Mumford, 1997; Roth and Black, 2005).
If outliers are present in the data, e.g. as salt-and-
pepper noise, or dropouts, other reconstruction meth-
ods than diffusion are usually applied, able to remove
outliers completely, e.g. median filtering (see e.g.
(Gonzalez and Woods, 2008)), or channel smoothing
(Felsberg et al., 2006) selecting the maximum mode
of the local value distribution. Channel smoothing
(CS) averages not only by applying a spatial window,
but also windows in the value domain. However, the
value domain window is not centered at the value of
the currently processed pixel, in contrast to bilateral
filtering (Tomasi and Manduchi, 1998), but centered
at the maximum of the local value distribution. By
this, it removes clear outliers and interpolates from
neighbors. If Gaussian noise is present in the data,
also a part of the inliers are lost due to the value do-
main window and not considered in the value recon-
struction. Consequently the reconstructed gray value
is less efficiently denoised as if all inliers were con-
sidered.
1.1 Main Contributions
The core idea of this paper is to drive a non-linear
diffusion process using the CS result as image struc-
ture information. CS alone gives poor denoising re-
sults for medium to high Gaussian noise levels. In this
case, non-linear diffusion can yield higher signal-to-
noise-ratio (SNR) as it can average over all available
data. However, usual non-linear diffusion which is
driven by the local gradient stops at clear outliers, not
suppressing them. CS removes outliers while preserv-
ing edge location and roughly edge strength. Thus
driving a non-linear diffusion by CS allows to over-
smooth – not remove – outliers. We therefore expect
to gain SNR compared to plain CS when a consid-
erable amount of Gaussian noise is present and still
suppress outliers such that they are less visible in the
image. To derive the CS-based diffusion term, we de-
fine an energy term penalizing the gradient of a chan-
nel encoded image.
The schematic diffusion approach is illustrated in
Fig. 1. The noisy image is decomposed into its corre-
sponding channel representation. Within the channel
space we determine a local neighborhood which best
represents the data sample in the image space, thus we
guide a diffusion process such that Gaussian and im-
pulse noise is reduced which is indicated by the white
spots in the ”Filter & Update” step. Black indicates
no update, so important structure and edges in the im-
age are preserved.
Clearly, our diffusion process cannot remove out-
liers from data, but strongly smooth impulse-like
outliers. It is therefore well adapted to improve
the visual impression and preserving the structure
of reconstructed images, measured by SSIM (Wang
et al., 2004) in our experiments. Due to the mean-
preserving property of diffusion filtering, bias-free
improvement of the reconstructed data values can
only be hoped for, when zero-mean noise is present.
2 BACKGROUND THEORY
In order to derive the novel non-linear channel-based
diffusion (NLCD) scheme in the subsequent section
we first recall image diffusion derived from an energy
minimization, before the framework of channel repre-
sentation and channel smoothing is briefly described.
2.1 Regularization and Image Diffusion
Let u(x, y) : Ω ⊂ R
2
→ R be a scalar valued image
defined on a subset of R
2
. The variational approach
to image regularization or image diffusion
1
is to con-
sider an energy functional of the form
E(u) =
1
2
Z
Ω
(u − u
0
)
2
dxdy + λR(u) , (1)
where R(u) is a regularization term, λ ∈ R, λ > 0 con-
trols the influence of the regularization and u
0
is the
observed image. In particular let R(u) be selected as
R(u) =
1
2
Z
Ω
|∇u|
2
dxdy , (2)
where the gradient operator is defined as ∇ =
∂
x
, ∂
y
t
and
|
·
|
denotes the Euclidean norm. Then
the functional E(u) defines linear image regulariza-
tion: To minimize E(u) one can compute the varia-
tional derivative and by assuming Neumann bound-
ary conditions
h
∇u, n
i
= 0 for a boundary element n
1
Image regularization and image diffusion are closely
related. Image regularization is a boundary value problem,
equivalent to heat diffusion with source terms in physics.
Image diffusion is equivalent to heat diffusion without
sources, formulated as initial value problem, starting with
the measured, noisy image. In both cases, the regulariza-
tion term defines the smoothing process leading to noise
suppression. For simplicity, we call this process diffusion in
both cases, as usual in physics. For details of the very close
relation between regularization and diffusion see (Scherzer
and Weickert, 1998).
UsingChannelRepresentationsinRegularizationTerms-ACaseStudyonImageDiffusion
49
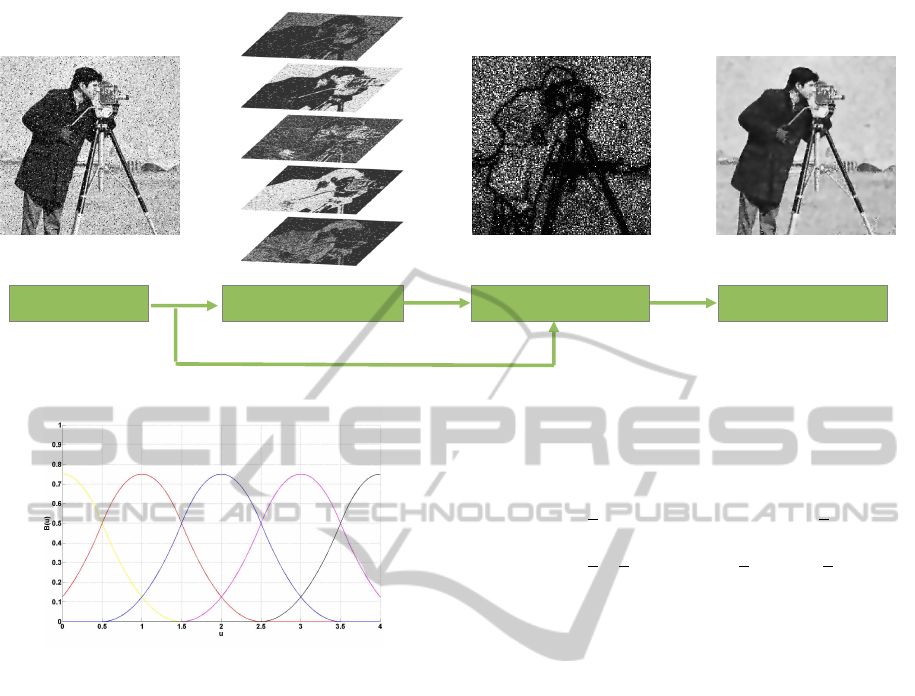
Noisy image Channel encode Denoised imageFilter & Update
Figure 1: Overview of proposed method. Contrast is increased in ”Filter & Update” for a better visualization.
Figure 2: Example for equidistantly distributed B-Spline
basis functions. Five channels are used here.
of ∂Ω, we obtain the Euler-Lagrange (EL) equation
described by the PDE
u − u
0
− λ∆u = 0
h
∇u, n
i
= 0.
(3)
The corresponding linear diffusion without data term
reads
∂
t
u = ∆u
h
∇u, n
i
= 0.
(4)
2.2 Channel Representation
This section introduces channel representations as an
approximative density estimator as described in (Fels-
berg et al., 2006). Channel representations are ba-
sically soft-histograms, i.e., histograms where sam-
ples are not exclusively pooled to the closest bin cen-
ter, but to several bins with a weight depending on
the distance to the respective bin center. The ’bins’
are called ’channels’. The binning operator or den-
sity mapping function is called a basis function, B(u),
and is usually non-negative (as densities are non-
negative), has compact support and is smooth (for sta-
bility reasons). The measure induced by the mapping
to channel representations should be position inde-
pendent in order to avoid an unwanted bias. In this
paper, quadratic B-splines are used as basis functions:
B(u) =
3
4
− u
2
0 ≤ |u| ≤
1
2
1
2
3
4
− |u|
2
1
2
< |u| ≤
3
2
0 Otherwise.
(5)
Without loss of generality we assume that u(x) ∈
[0, N − 1] before the signal can be encoded into N
channels. Otherwise we linearly transform u to that
interval. Figure 2 depicts the basis functions in the
case of 5 channels. Let c ∈ R
N
, N > 0, be an equidis-
tantly distributed grid over the image range of u. We
call c = (c
1
, . .. , c
N
)
t
channel center vector. Then
we obtain the quadratic B-Spline channel representa-
tion B
i
= B(u(x, y) − c
i
) where B = (B
1
, . .. , B
N
), i =
1, . .. , N is called channel vector.
In channel smoothing (Felsberg et al., 2006) the
channel vectors are spatially averaged using a Gaus-
sian kernel w resulting in
˜
B
i
(x, y) = w ∗ B
i
(x, y). (6)
Reconstructing a value u from the channel represen-
tation can be done using a linear combination of all
channel vector components yielding a linear decod-
ing. To obtain a robust decoding scheme only a
subset of the channel components is used (Felsberg
et al., 2006). In this work a window of size 3 around
the maximum mode location of the channel vector is
computed i.e.
l = argmax
k
∑
k+1
i=k−1
˜
B
i
(x, y) (7)
with k = 2, . . . , N − 1. Then the robust decod-
ing scheme, also used in the framework of channel
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
50

smoothing (Felsberg et al., 2006), reads
ˆu(x, y) =
l+1
∑
i=l−1
c
i
˜
B
i
(x, y) . (8)
where we assume that the coeffcients
˜
B
i
(x, y) sum up
to one, if not, we normalize them to do so. Note that
the choice of l in (7) depends on continuously differ-
entiable basis functions such that the local maxima
are continuous functions of the input values. The or-
der of local maxima depends on the clusters of the
inputs, but this is desirable since this reflects e.g. the
non-stationarity across edges.
3 IMAGE DIFFUSION WITH THE
CHANNEL FRAMEWORK
In this section we introduce an energy functional
combining the framework of diffusion filtering and
channel representation in order to first derive linear
channel-based diffusion (LCD) before extending it to
the non-linear case (NLCD).
3.1 Introducing Channel
Representation to Linear Image
Diffusion
In order to enable diffusion methods to oversmooth
impulse noise, we define the regularization term R(u)
using the channel representation as described in the
previous section. We encode u into the channel space
using (8) thus leading to the regularization term
R(u) =
Z
Ω
|∇
l+1
∑
i=l−1
c
i
˜
B
i
(x, y)|
2
dxdy , (9)
where l is defined in (7) and
˜
B are the smoothed chan-
nel weights as in (6). With notational abuse, to sim-
plify notation, we define in the subsequent derivation
l+1
∑
i=l−1
c
i
˜
B
i
(x, y) = c
t
˜
B , (10)
where the 3-box windowing is implicitly included in
˜
B(u). The integrand of R(u) can then be written in
vector-matrix notation as |∇(c
t
˜
B)|
2
which yields
R(u) =
Z
Ω
c
t
(∂
x
˜
B)(∂
x
˜
B)
t
+ (∂
y
˜
B)(∂
y
˜
B)
t
c dxdy .
(11)
To find the EL-equation of (11) we compute the vari-
ational derivative, denoted as R
u
v =
∂R(u+εv)
∂ε
ε=0
, in
the direction of v with respect to u where v ∈ C
2
(Ω)
is a non-zero testfunction. We split the integral (11)
into two integrals calculating the x- and y-component
separately and get
R
u
v =
∂
∂ε
Z
Ω
c
t
˜
B
0
(u + εv)
˜
B
0
(u + εv)
t
· (∂
x
u + ε∂
x
v)
2
c dxdy
i
ε=0
=
Z
Ω
c
t
∂
∂ε
h
˜
B
0
(u + εv)
˜
B
0
(u + εv)
t
i
ε=0
c(∂
x
u)
2
+ 2c
t
˜
B
0
(u)
˜
B
0
(u)
t
∂
x
u∂
x
v
c dxdy
=
Z
Ω
c
t
˜
B
00
(u)
˜
B
0
(u)
t
+
˜
B
0
(u)
˜
B
00
(u)
t
c(∂
x
u)
2
v dxdy
− 2
Z
Ω
∂
x
c
t
˜
B
0
(u)
˜
B
0
(u)
t
c∂
x
u
v dxdy .
The same holds for the y-component. For the last
equation we applied Green’s formula and Neumann
boundary conditions to get rid of the ∂
x
v term which
cannot be determined. To further simplify nota-
tion let S(u) =
˜
B
0
(u)
˜
B
0
(u)
t
. Using the definition
of divergence and the equality div(c
t
S(u)c ∇u) =
c
t
S
0
(u)c∇u (∇u)
t
+c
t
S(u)c ∆u the variation of the en-
ergy in the direction of v can be formulated as
R
u
v = −
div
c
t
S(u)c ∇u
+ c
t
S(u)c ∆u
v .
With the derived functional derivative we are able to
obtain the PDE
∂
t
u = div(c
t
S(u)c ∇u) + c
t
S(u)c ∆u
h
∇u, n
i
= 0,
(12)
where λ > 0 is a constant. The matrix S(u) is a sym-
metric matrix with entries as a block of size three
centered around the main diagonal (cmp. Figure 3a).
Since S(u) is the outer product of the vector
˜
B
0
, it is
positive semi definite. The scalar value c
t
S(u)c acts as
a weight and we obtain a coefficient with large entires
in homogeneous areas as the box decoding includes
almost all relevant values. At edges the coefficient
has low entries. At outlier positions the coefficient is
still large (cmp. Figure 3b).
We observe that the right hand side of (12), top,
consists of two terms, where the left one has the usual
form of non-linear diffusion with spatial varying dif-
fusivity c
t
S(u)c, and the right one the form of a dif-
fusion term ignoring the spatial variation of c
t
S(u)c.
For linear decoding channel smoothing breaks down
to simple local averaging of u and c
t
S(u)c ≡ 1, inde-
pendent of the variance of w (cmp. (6)), and (12) be-
comes plain linear diffusion (4). Using robust decod-
ing c
t
S(u)c becomes a spatially varying function and
(12) a non-linear diffusion with reduced diffusivity at
edges and high diffusivity in homogenous regions as
well as at outlier positions (cmp. Figure 3b).
UsingChannelRepresentationsinRegularizationTerms-ACaseStudyonImageDiffusion
51

0 2 4 6 8 10
0
2
4
6
8
10
a) b)
Figure 3: a) Typical structure of S(u) for a certain spatial
position. The size of the matrix is equal to the number of
channels. In this example 11 channels are used and non-
zero entries are centered around channel 9. b) Structure of
c
t
S(u)c for the cameraman image and a Gaussian kernel w
with standard deviation 3. Black indicates low and white
high values close to 1.
3.2 Introducing Channel
Representation to Non-linear Image
Diffusion
Here the LCD will be extended to its non-linear pen-
dant including a convex potential function Φ. The
motivation is to further control the filtering to pre-
serve fine image details, similarly to the approach by
Perona and Malik (Perona and Malik, 1990). Includ-
ing a potential function allows to suppress outliers
further as they will not appear in the structure esti-
mation.
Let the regularization term be defined as
R(u) =
Z
Ω
Φ(|∇(c
t
˜
B(u))|)dxdy , (13)
where c
t
˜
B(u) is the channel smoothed version of the
image u as defined in (8). By computing the varia-
tional derivative R
u
v in a similar way as presented in
the previous section we obtain
R
u
v =
Z
Ω
Φ
0
(|∇(c
t
˜
B(u))|)
1
2
1
|∇(c
t
˜
B(u))|
·
∂
∂ε
|∇(c
t
˜
B(u + εv))|
2
ε=0
dxdy.
(14)
Using the short notation Ψ =
Φ
0
(|∇(c
t
˜
B(u))|)
|∇(c
t
˜
B(u))|
and the
derivation from the previous section, the EL-equation
reads
∂
t
u = λ
1
2
Ψ div(c
t
S(u)c)∇u
+c
t
S(u)c div(Ψ∇u)
h
∇u, n
i
= 0,
(15)
where λ > 0 and S(u) =
˜
B
0
(u)
˜
B
0
(u)
t
as before.
The two right hand terms of (15) both implement non-
linear diffusion weighted by an additional factor. In
the first term the diffusivity stemms from the channel
representation and the usual edge stopping function
Ψ acts as additional weight. In the second term the
roles of Ψ and c
t
S(u)c are exchanged. Furthermore,
Ψ is defined on the channel smoothed image c
t
˜
B(u),
so outliers are not present in the structure estimation
of Ψ and will be smoothed strongly.
4 EXPERIMENTS
In this section we evaluate the proposed linear chan-
nel diffusion (LCD) and the non-linear channel diffu-
sion (NLCD) for different grey-scale images. Stan-
dard images as ”Cameraman” are used as well as
images from the Berkeley image database (Martin
et al., 2001) commonly used for segmentation pur-
poses. Since we are interested in investigating the
case of a mixture of noise models we corrupt the im-
ages with Gaussian noise as well as impulse noise.
Here we consider the presence of 5% impulse noise
and vary the standard deviation of Gaussian noise
σ ∈
{
5, 10, 15,20, 30, 40, 50
}
.
4.1 Setup of Evaluation
The aim of the evaluation is to compare the pro-
posed LCD and NLCD schemes especially to dif-
fusion schemes and channel smoothing as we intro-
duced an extension of these methods. Current state-
of-the-art denoising methods are included as well.
We compare to linear diffusion (LD) and non-linear
diffusion (NLD) as introduced by Perona-Malik (Per-
ona and Malik, 1990). Furthermore, we consider the
tensor-driven anisotropic diffusion scheme (AD) (We-
ickert, 1998). Besides channel smoothing (CS) (Fels-
berg et al., 2006), median filtering (MF) is included
as a method well suited for impulse noise. Further
BM3D (Dabov et al., 2006) is regarded, currently
one of the best methods for filtering Gaussian noise.
It considers both a non-linear threshold operation as
well as a linear Wiener filter approach to a stack of
patches which locally describe the same image region.
Finally, two implementations of non-local means are
regarded. We compared to the original, pixel based
implementation (Buades and Coll, 2005) as well as to
the the patch based variant (Buades et al., 2011).
All methods have been optimized with respect to
their parameters. We optimized LCD and NLCD with
respect to the number of channels and the edge pa-
rameter α in the edge stopping function Ψ, which
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
52
234
2
2.5
3
3.5
4
linear diffusion
non−linear diffusion
anisotropic diffusion
channel smoothing
linear channel diffusion
non−linear channel diffusion
0 5 10
0
5
10
Median filter
BM3D
NLM patchbased
10 20 30 40 50
0.6
0.7
0.8
0.9
SSIM
Noise level
Cameraman
10 20 30 40 50
0.5
0.6
0.7
0.8
0.9
SSIM
Noise level
Skyline
10 20 30 40 50
0.8
0.85
0.9
0.95
SSIM
Noise level
Hawk
10 20 30 40 50
0.8
0.85
0.9
0.95
SSIM
Noise level
Bird
10 20 30 40 50
0.6
0.7
0.8
0.9
SSIM
Noise level
Rollercoaster
10 20 30 40 50
0.7
0.75
0.8
0.85
0.9
0.95
SSIM
Noise level
House
10 20 30 40 50
0.7
0.8
0.9
SSIM
Noise level
Lena
10 20 30 40 50
0.7
0.8
0.9
SSIM
Noise level
Boat&House
10 20 30 40 50
0.6
0.7
0.8
0.9
SSIM
Noise level
Lighthouse
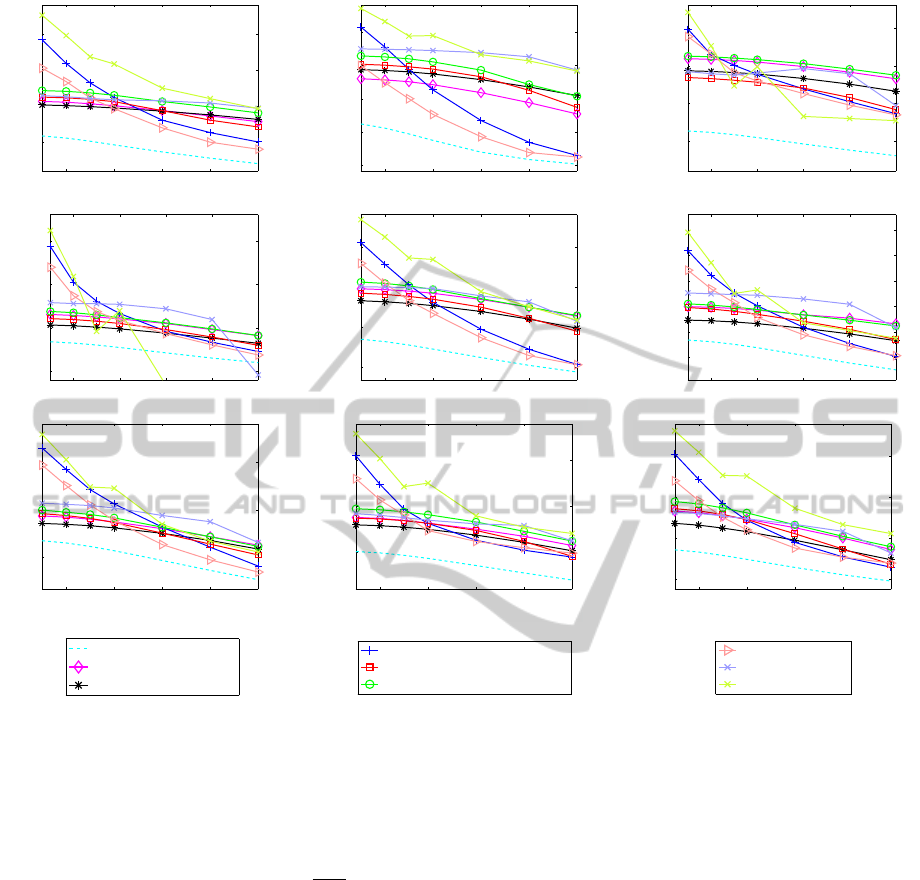
Figure 4: Quantitative denoising results of the images Skyline (69007), Hawk (42040), Bird (197027), Rollercoaster (235098),
Boat &House (140088) and Lighthouse (228076) from the Berkeley image database (Martin et al., 2001) and standard test
images (Cameraman, House, Lena). The numeric name is the same as in the database. Used methods are linear diffusion,
NLD (Perona and Malik, 1990), AD (Weickert, 1998), CS (Felsberg et al., 2006), the novel LCD, the novel NLCD, MF
(Gonzalez and Woods, 2008), BM3D (Dabov et al., 2006) and NLM (Buades et al., 2011). SSIM versus different Gaussian
noise levels is plotted. For details see text. Best viewed in color
has been chosen as Ψ(|∇u|) = (1 +
|∇u|
2
α
2
)
−1
. Fur-
thermore, the size of the median filter was optimized.
For the channel smoothing (CS) we use a box decod-
ing scheme, optimize the number of channels, and
optimize the variance of the Gaussian filter used for
smoothing in each channel. In AD, the mapping of the
structure tensor eigenvalues to diffusivities is done us-
ing the same edge stopping function as for NLD. The
parameter α is also optimized.
We implement our diffusions in a standard Euler
forward scheme and use finite differences to approx-
imate the image derivatives for every spatial position
in the image. For each method and parameter opti-
mization we let the filtering continue until the maxi-
mum of the structure similarity index (SSIM) (Wang
et al., 2004) has been reached.
4.2 Results
In Figure 4 we show the best obtained SSIM value
for each image and considered noise level. The pixel
based NLM variant (Buades and Coll, 2005) has
SSIM values between 0.3 and 0.5 for all images as
it poorly reduces impulse noise. To focus on higher
SSIM values we do not show values for pixel NLM.
Generally, best denoising results are obtained by
the patch version of the non-local means, especially
for low gaussian noise levels. BM3D also gains high
SSIM. For low Gaussian noise CS shows good results
as well. This was expected as channel smoothing, as
well as median filtering, are well suited methods for
removing clear outliers. The NLCD gives quite high
SSIM for higher Gaussian noise levels.
For few special cases we observe that NLCD per-
UsingChannelRepresentationsinRegularizationTerms-ACaseStudyonImageDiffusion
53
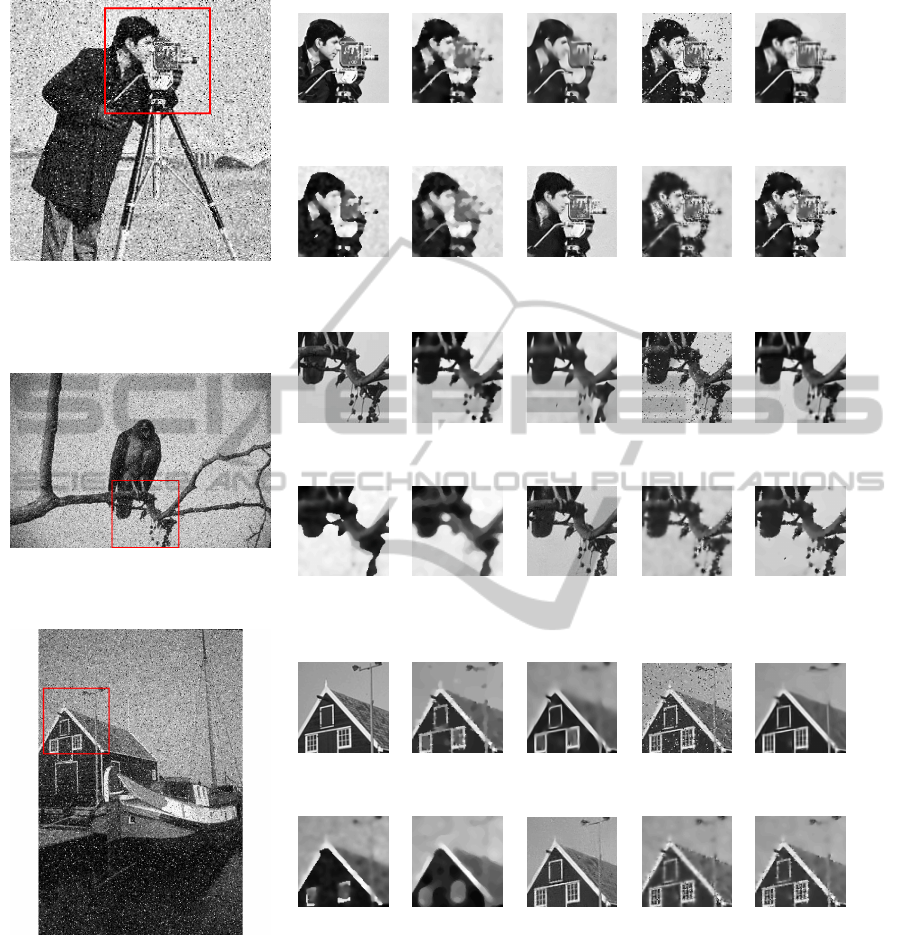
Cameraman
Initial noise = 0.2692
Original NLD AD NLM pixel BM3D
0.6874 0.6858 0.3753 0.7145
CS MF NLM patch LCD NLCD
0.6606 0.6393 0.7408 0.6871 0.7126
Hawk
Initial noise = 0.1460
Original NLD AD NLM pixel BM3D
0.8989 0.8832 0.2822 0.8963
CS MF NLM patch LCD NLCD
0.8694 0.8632 0.8329 0.8705 0.9028
Boat&House
Initial noise = 0.1687
Original NLD AD NLM pixel BM3D
0.7511 0.7380 0.2964 0.7624
CS MF NLM patch LCD NLCD
0.7269 0.7242 0.7798 0.7481 0.7665
Figure 5: Visualization of certain parts of different images (Cameraman, Hawk, Boat&House) of noise level σ = 30. A visual
comparison is done between the introduced methods.
forms best, even better than the state-of-the-art de-
noising methods BM3D and NLM, which is unex-
pected, see e.g. result for the hawk image. In all cases
NLCD is comparable and most times better than the
other diffusion-based methods, especially well e.g.
in the skyline image or the cameraman. As soon as
Gaussian noise of around σ = 15 or σ = 20 has been
added to the image the NLCD also ouperforms CS.
The aim of this work was not to construct the best
denoising algorithm but to combine the advantages of
channel smoothing and diffusion based schemes. The
NLCD outperforms in all cases CS if a medium or
high amount of Gaussian noise is present and it out-
performs in most cases NLD and AD for all noise lev-
els. In some cases NLCD even shows competitive re-
sults compared to state-of-the-art denoising methods.
In Figure 5 a visualization of certain image close
ups can be seen. The CS and MF show a comic like
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
54

behavior, maintaining the main edges well but details
are lost as can be seen in the face or the camera. The
pixel based NLM cannot handle the impulse noise at
all. Better preservation of details is achieved using
AD or NLD. Good results show the patch based NLM
and BM3D. However, for patch NLM the image still
shows some Guassian noise and for BM3D still some
details are lost. The proposed LCD show an improve-
ment compared to CS and MF, but due to its linear
form the edges are smeered. Visually, better results
compared to CS and diffusion methods are obtained
with NLCD. It keeps the details and it is able to han-
dle impulse noise as well as Gaussian noise.
5 CONCLUSIONS
For the aim of filtering noisy images a new linear and
a new non-linear diffusion scheme has been presented
using advantages of channel representations. For this
purpose we derived an iterative filtering scheme by
minimizing a corresponding energy functional. In-
cluding the channel framework leads to a robust fil-
tering well suited for images corrupted with Gaus-
sian as well as impulse noise. We analysed the de-
noising behaviour of the proposed method on com-
monly used scalar valued images and compared the
methods to similar as well as state of the art meth-
ods. It turned out that the new method outperforms
the other diffusion-based methods if impulse noise
and a medium or high amount of Gaussian noise are
present. In some cases it even outperforms state-of-
the-art denoising methods. In future investigations,
application of the novel NLCD scheme to DTMRI
and HARDI data may be of interest.
ACKNOWLEDGEMENTS
This research has been in part supported by the
Swedish Research Council through a grant for the
project Visualization-adaptive Iterative Denoising of
Images and has received in part funding from the Eu-
ropean Communitys Seventh Framework Programme
FP7/2007-2013 Challenge 2 Cognitive Systems, In-
teraction, Robotics under grant agreement No 247947
GARNICS.
REFERENCES
Black, M., Sapiro, G., Marimont, D., and Heeger, D.
(1998). Robust anisotropic diffusion. TIP, pages 421–
432.
Buades, A. and Coll, B. (2005). A non-local algorithm for
image denoising. In CVPR, pages 60–65.
Buades, A., Coll, B., and Morel, J.-M. (2011). Non-Local
Means Denoising. Image Processing On Line, 2011.
Burgeth, B., Didas, S., Florack, L., and Weickert, J. (2007).
A generic approach to diffusion filtering of matrix-
fields. Computing, 81:179–197.
Dabov, K., Foi, A., Katkovnik, V., and Egiazarian, K.
(2006). Image denoising with block-matching and 3d
filtering. In Electronic Imaging’06, Proc. SPIE 6064.
Felsberg, M., Forss
´
en, P.-E., and Scharr, H. (2006). Channel
smoothing: Efficient robust smoothing of low-level
signal features. PAMI, 28(2):209–222.
Goh, A., Lenglet, C., Thompson, P. M., and Vidal, R.
(2011). A nonparametric riemannian framework for
processing high angular resolution diffusion images
and its applications to odf-based morphometry. Neu-
roImage, 56(3):1181 – 1201.
Gonzalez, R. C. and Woods, R. E. (2008). Digital Image
Processing - 3d edition. Pearson International Edition.
Granlund, G. H. (2000). An associative perception-action
structure using a localized space variant information
representation. In Proceedings of AFPAC.
Kimmel, R., Malladi, R., and Sochen, N. A. (1998). Image
processing via the Beltrami operator. In ACCV LNCS,
pages 574–581.
Krajsek, K., Menzel, M., Zwanger, M., and Scharr, H.
(2008). Riemannian anisotropic diffusion for tensor
valued images. In ECCV, LNCS, pages 326–339.
Martin, D., Fowlkes, C., Tal, D., and Malik, J. (2001). A
database of human segmented natural images and its
application to evaluating segmentation algorithms and
measuring ecological statistics. In ICCV. 416–423.
Perona, P. and Malik, J. (1990). Scale-space and edge detec-
tion using anisotropic diffusion. PAMI, 12:629–639.
Roth, S. and Black, M. J. (2005). Fields of experts: A
framework for learning image priors. In CVPR. 860–
867.
Scharr, H. (2006). Diffusion-like reconstruction schemes
from linear data models. In Pattern Recognition
LNCS, volume 4174, pages 51–60, Berlin. Springer.
Scherzer, O. and Weickert, J. (1998). Relations between
regularization and diffusion filtering. Journal of Math-
ematical Imaging and Vision, 12:43–63.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In ICCV, pages 839–846.
Tschumperl
´
e, D. and Deriche, R. (2005). Vector-valued im-
age regularization with pdes: A common framework
for different applications. PAMI, 27(4):506–517.
Wang, Z., Bovik, A., Sheikh, H., and Simoncelli, E. (2004).
Image quality assessment: from error visibility to
structural similarity. IEEE TIP, 13(4):600 –612.
Weickert, J. (1998). Anisotropic Diffusion In Image Pro-
cessing. ECMI Series, Teubner-Verlag, Stuttgart.
Zhu, S. C. and Mumford, D. (1997). Prior learning and
gibbs reaction-diffusion. PAMI, 19:1236–1250.
UsingChannelRepresentationsinRegularizationTerms-ACaseStudyonImageDiffusion
55
